
Shaping the Behavior Space with Counterfactual Agents in
Multi-Objective Map Elites
Anna Nickelson, Nicholas Zerbel, Gaurav Dixit and Kagan Tumer
Collaborative Robotics and Intelligent Systems (CoRIS) Institute, Oregon State University, Corvallis, OR, U.S.A.
Keywords:
Counterfactuals, Quality Diversity, Multi-Objective, Evolutionary Learning.
Abstract:
Success in many real-world problems cannot be adequately defined under a single objective and instead re-
quires multiple, sometimes competing, objectives to define the problem. To perform well in these environ-
ments, autonomous agents need to have a variety of skills and behaviors to balance these objectives. The
combination of Multi-Objective Optimization (MOO) and Quality Diversity (QD) methods, such as in Multi-
Objective Map Elites (MOME), aim to provide a set of policies with diverse behaviors that cover multiple
objectives. However, MOME is unable to diversify its search across the behavior space, resulting in signif-
icantly reduced coverage of the global Pareto front. This paper introduces Counterfactual Behavior Shaping
for Multi-Objective Map Elites (C-MOME), a method that superimposes counterfactual agents onto the state
space of a learning agent to more richly define the diversity of agent behaviors. Counterfactuals explicitly
introduce new forms of diversity in agent behaviors, resulting in C-MOME’s effective coverage of behavioral
niches; this provides a broader set of Pareto optimal policies. We show that C-MOME covers more than twice
as much of the behavior space compared to MOME while increasing the hypervolume of the global Pareto
front by over 40%.
1 INTRODUCTION
When optimizing over a single objective, learning-
based approaches seek to find the best solution avail-
able that represents the global optimum. Although
some problems can be adequately defined under a sin-
gle objective, many real-world problems are complex
and define success using multiple competing objec-
tives that need to be balanced. For example, engi-
neering design tasks often aim to maximize safety
while minimizing costs (Coello Coello, 2006) and in
multi-robot exploration tasks, designers try to maxi-
mize exploration while minimizing energy consump-
tion, travel time, or distance (Burgard et al., 2005; Al-
itappeh and Jeddisaravi, 2022). While many Multi-
Objective Optimization (MOO) algorithms have been
introduced to find well-balanced solutions to these
problems, they typically consider objective trade-
offs under a particular set of operating conditions.
For long-term deployments and dynamic environ-
ments, autonomous agents need to be able to adapt to
changes in the environment while continuing to bal-
ance multiple goals. This is a challenging problem for
agents as they need to learn what tasks to accomplish,
how to accomplish the tasks, how different tasks cor-
relate with different objectives, and what the best bal-
ance between objectives is for the current system con-
ditions.
One way to provide a stepping stone to this level
of reasoning is to train a diverse set of policies or
skills for the agent to enact in different scenarios.
Quality Diversity (QD) methods can be used to ad-
dress this training step as they intentionally diver-
sify the search by focusing on policies that cover a
wide range of behaviors in order to provide a breadth
of policies (Mouret and Clune, 2015). Popular QD
approaches, such as Multi-dimensional Archive of
Phenotypic Elites (MAP-Elites) (Mouret and Clune,
2015), aim to find policies that fill different behav-
ioral niches, but these methods still typically focus
on finding policies that solve for a singular objective.
Multi-Objective Map Elites (MOME) addresses this
issue by maintaining a local Pareto front within each
behavioral niche to cover multiple objectives (Pierrot
et al., 2022). However, MOME is unable to fully di-
versify its search across the behavior space, leading
to poor coverage across the Pareto front and behavior
space.
In this work we propose Counterfactual Behavior
Shaping for Multi-Objective Map Elites (C-MOME).
Nickelson, A., Zerbel, N., Dixit, G. and Tumer, K.
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites.
DOI: 10.5220/0012164800003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 41-52
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
41
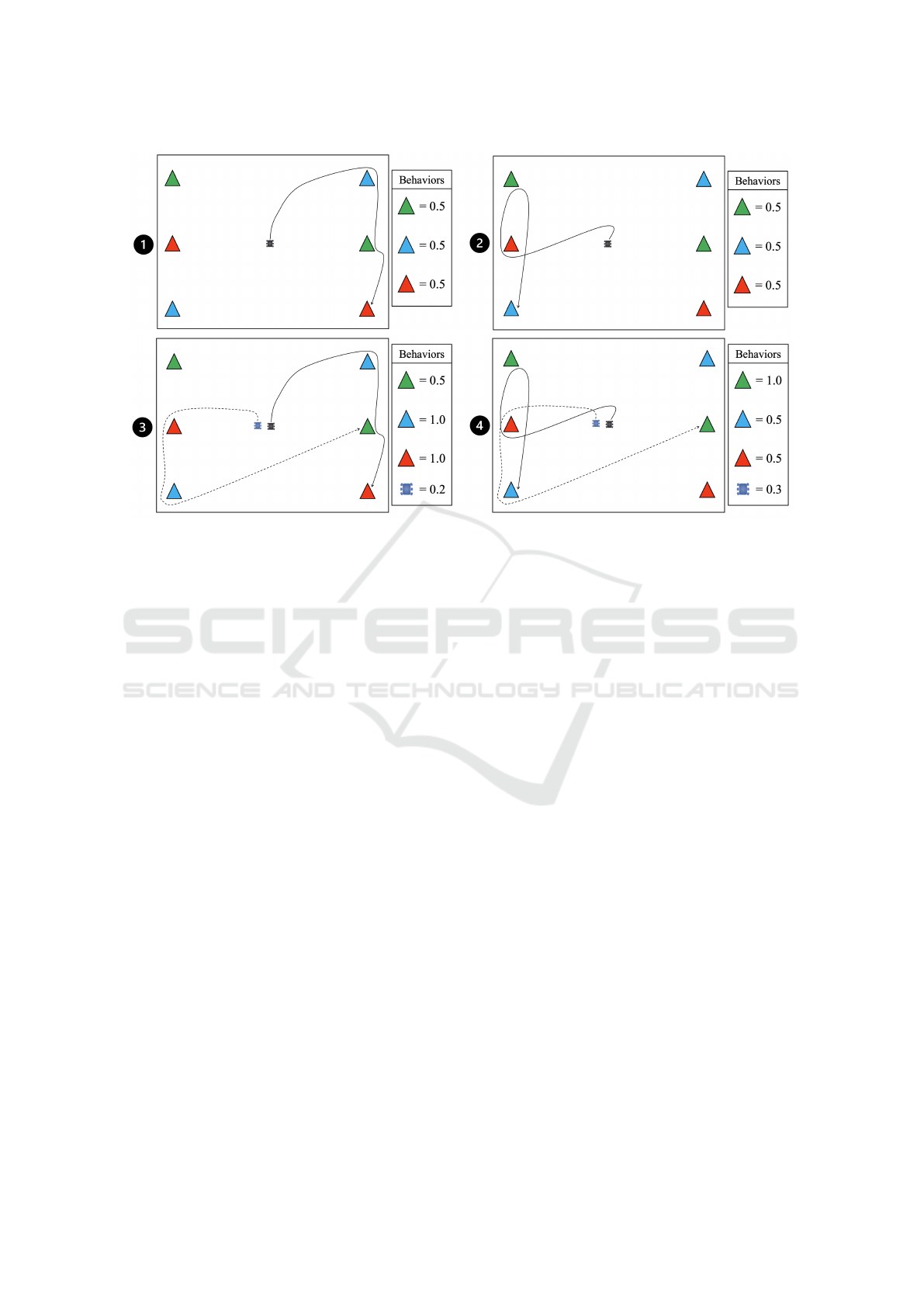
Figure 1: In sub-figures (1) and (2), we show two distinct agent behaviors resulting from different policies in a multi-objective
tasks observation problem. In (1) and (2) behaviors are defined by the percentage of each tasks type an agent observes.
However, this definition of behaviors does not effectively capture the distinctiveness of the two agent behaviors. By injecting
a counterfactual agent, we redefine the learning agent’s behaviors to more accurately capture this diversity. In this scenario,
adding a counterfactual agent also adds a new behavioral measure that describes tasks exploration overlap between agents.
Applying these counterfactual behaviors we see that agent behavior (1) can be redefined as (3) and agent behavior (2) can be
redefined as (4). While MOME would sort the policies for behaviors (1) and (2) into the same behavioral niche, C-MOME
sorts these policies into separate niches. This helps C-MOME diversify its search across both the behavior and objective
spaces.
C-MOME superimposes counterfactual states con-
taining agent representations onto the state space of
learning agents. Counterfactual agents inject struc-
tured dynamics into agent behaviors, which enables
a broader definition of diversity within the behavior
space of MAP-Elites. This enables C-MOME di-
versify its search across the behavior space; in turn,
C-MOME provides significantly greater coverage of
effective policies along the global Pareto front and
across the behavior space.
To illustrate how counterfactuals redefine agent
behaviors, we consider a multi-objective observation
task within a confined environment involving multi-
ple types of targets. In this example, the behavior
space is defined by the types of targets the agent vis-
its and how it chooses to interact with them. As in
many QD problems, this definition is constrained by
the environment. As a result, MOME is unable to ef-
fectively expand its search across the entire behavior
space. This constricts down the search resulting in a
lack of coverage of the global Pareto front. By intro-
ducing new behaviors defined through counterfactual
agents, C-MOME more richly defines agent behaviors
and expands the search to cover the entire behavior
space. We illustrate this in Figure 1.
The contributions of this work are to:
1. Refine the behavior space of an agent by inject-
ing counterfactual agents into the state space of a
learning agent,
2. Provide a greater coverage of policies along the
global Pareto front and behavior space in multi-
objective problems,
3. Analyze how counterfactuals impact the quality
and diversity of agent policies.
In a Multi-Objective tasks observation problem,
we show that C-MOME improves coverage of both
the behavior space by more than 2x and the global
Pareto front by more than 40% compared with
MOME. We compare the performance of MOME
and C-MOME to other state-of-the-art MOO algo-
rithms (namely Nondominated Sorting Genetic Algo-
rithm II (NSGA-II)). We also demonstrate the impact
of different counterfactuals on agent policies by com-
paring the policies found along the Pareto front with
overall coverage of niches within the behavior space.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
42

2 BACKGROUND
In many real-world problems, success is seldom de-
fined under a singular objective. To solve these prob-
lems, autonomous agents typically need to learn a
wide range of different policies that can balance trade-
offs between multiple different objectives in various
ways. In this section we discuss several areas of study
relevant to this problem including Multi-Objective
Optimization and Quality Diversity. We also discuss
related works such as MOME and the use of counter-
factuals in machine learning.
2.1 Multi-Objective Optimization
Problems that do not have a single, optimal solu-
tion and are classified as Multi-Objective Optimiza-
tion (MOO) problems. Many problems use multiple
different objectives to define success, many of which
are conflicting. When the preferred balance between
objectives is known in advance, the objectives can be
scalarized and an optimal solution can be found with
traditional single-objective searches (Das and Den-
nis Jr, 1996; Drugan and Nowe, 2013; Van Moffaert
et al., 2013). In many cases, the preferred balance
may not be known or may change based on the sit-
uation. Most strategies to MOO aim to provide a set
of solutions that optimize different trade-offs between
objectives. The goal of MOO methods is to find cov-
erage of the optimal region of the objective space,
known as the Pareto front, in order to present a set
of solutions that provide different balances between
objectives.
Evolutionary search-based methods are a natural
fit for this problem, as they are able to find, com-
pare, and iterate over a population of policies to
find incrementally better solutions. Two of the most
prominent evolutionary multi-objective methods are
Strength Pareto Evolutionary Algorithm 2 (SPEA2)
(Zitzler et al., 2001) and Nondominated Sorting Ge-
netic Algorithm II (NSGA-II) (Deb et al., 2002).
NSGA-II uses a non-dominated sorting method for
ranking and sorting each solution, and it also in-
cludes a measure of crowding distance among solu-
tions to force the search to diversify across the objec-
tive space. SPEA2 computes a strength value for each
solution found, and it stores stores previously found
non-dominated solutions. This set of stored solutions
is updated after every generation. The fitness of each
solution is calculated based on the number of solu-
tions that dominate it and that are dominated by it.
2.2 Quality Diversity
Where MOO aims to solutions that provide cover-
age over the objective space, Quality Diversity (QD)
seeks find diversified policies that capture a broad
set of behaviors. This builds on previous techniques
in novelty search that focus on finding substantially
different solutions (Eysenbach et al., 2019; Lehman
and Stanley, 2011). QD aims to diversify across a
pre-defined “behavior space”, a reduced-dimensional
summary of the actions or behaviors of each policy.
QD methods separate the behavior space into many
local regions, called niches, then keeps the best pol-
icy found in each niche. One notable example of
QD methods is Multi-dimensional Archive of Pheno-
typic Elites (MAP-Elites) (Mouret and Clune, 2015).
MAP-Elites is an evolutionary method that aims to
find many different solutions for a given task. Specif-
ically, MAP-Elites aims to find a diverse set of poli-
cies that do not necessarily solve a task optimally, but
solve a task using a variety of unique behaviors.
2.2.1 Multi-Objective Map Elites (MOME)
Multi-Objective Map Elites (MOME) (Pierrot et al.,
2022) incorporates the principles of both MOO and
QD search by building on the MAP-Elites framework.
Instead of a singular policy, MOME keeps the set
of policies in each niche that are locally Pareto op-
timal. In doing so, they are able to provide solutions
that are diverse across both the objective and behav-
ior spaces. However, combining these two methods
leads to extensive time spent searching and optimiz-
ing in unhelpful or sub-optimal regions of the behav-
ior space. By keeping locally Pareto optimal policies,
this method keeps many policies that result in no re-
ward as there are many niches where zeroes across all
objectives is locally Pareto optimal. These policies
are then used for mutation and crossover; without an-
other mechanism to add back diversity, the search is
weighed down and has a difficult time escaping these
local minima.
2.3 Counterfactuals in Agent Learning
Counterfactual thought is a strategy people often
use to analyze alternative outcomes to real events
and learn from “what-if” scenarios (Boninger et al.,
1994; Byrne, 2016). This concept has also been
adopted in agent-based learning paradigms, most no-
tably in applications of reward shaping that aim to ad-
dress the issue of credit assignment within multiagent
learning problems. For example, Difference Evalua-
tions compare rewards generated from counterfactual
states with the actual rewards agents received to pro-
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites
43

vide individuals with finely-tuned reward feedback in
cooperative multiagent learning problems (Agogino
and Tumer, 2004). In a similar work, Counterfac-
tual Multi-Agent (COMA) policy gradients rely on
a counterfactual baseline in reinforcement learning
contexts to single out individual agent actions while
keeping the actions of others fixed so more informa-
tive rewards can be evaluated (Foerster et al., 2018).
Counterfactuals have also been used in multiagent
coordination problems to produce “stepping stone”
rewards to make learning easier in situations where
task completion depends on simultaneous action in-
puts from multiple different agents. For example,
D++ compares the reward given by the current state
of a system with a reward generated from a counter-
factual state where n partner agents were available
to cooperate with a specific individual (Rahmattal-
abi et al., 2016). Counterfactuals have also been ex-
tended beyond reward shaping in applications such
as explainability in AI (Verma et al., 2020; Olson
et al., 2021), inference and decision making (Johans-
son et al., 2016; Kusner et al., 2017), and ethics in
machine learning (Kasirzadeh and Smart, 2021).
Regardless of the application, counterfactuals in
agent-based learning seek to shape available informa-
tion to provide richer learning signals or more trans-
parent decision making. In this work we apply coun-
terfactuals to quality diversity within multi-objective
problems to shape the state and behavior spaces using
counterfactual agents.
3 COUNTERFACTUAL
BEHAVIOR SPACE SHAPING
In this work, we introduce C-MOME, a novel ex-
tension to MOME that superimposes counterfac-
tual agents onto a learning agent’s state space and
shapes the behavior space used for policy search in
MAP-Elites and MOME. By injecting counterfac-
tual agents exhibiting different behaviors into the state
space, we more richly define the behaviors of a learn-
ing agent. This provides structured diversity at the be-
havior level enabling substantially better coverage the
behavior space. In turn, C-MOME finds a more use-
ful and diverse set of policies along the global Pareto
front.
To illustrate how counterfactuals can be used to
redefine the behavior space of an agent, we present an
example of an agent observing different types of tasks
in Figure 1. In this example, we define behaviors as
the percentage of each task type observed by an agent.
In Figure 1-1 and Figure 1-2, we see two different be-
haviors encoded within different agent policies. Al-
though the outcomes are similar in terms of observed
tasks, the policies exhibit two distinctive agent be-
haviors. However, based on the definition of the be-
havior space, these behaviors appear as non-distinct
and would be sorted into the same behavioral niche
within MOME. By injecting counterfactual agents,
we can redefine the behavior space to better capture
the differences between agent behaviors (Figure 1-
3 and Figure 1-4). Using these redefined behaviors,
the differences in the learning agent’s behaviors are
more distinct allowing C-MOME to sort the underly-
ing policies into more more representative behavioral
niches. By providing this form of structured diver-
sity, C-MOME builds a set of Pareto optimal poli-
cies that provide a greater coverage along the global
Pareto front.
Using counterfactual agents also allows the learn-
ing agent to learn different behaviors in a single agent
formulation while being sensitive to future learning
with real agent partners. This implementation of
C-MOME is designed to be the first step in a curricu-
lum learning solution for multiagent teaming, which
we discuss in the future work section (Section 6).
3.1 Counterfactual Representation
Counterfactuals are “counter to the facts”. They are
represented as non-learning agents and exhibit behav-
iors that impact the state space and re-define the be-
havior space for the learning agent. For example,
counterfactuals can be static or dynamic. The coun-
terfactual agents can also impact the tasks within the
state space or have no impact on tasks. A key factor is
that counterfactuals do not impact any of the agent re-
wards or the completion of objectives directly. Learn-
ing agents merely perceive that counterfactual agents
are impacting task completion and act according to
their state perception and policies. This limits the im-
pact of the counterfactuals to the state space and be-
havior space of the agent to improve the fidelity of the
policy search within the behavior space.
Counterfactuals impact the agent’s perception in
three distinct ways. In the state space, counterfactuals
can have a direct impact by (1) appearing as agents;
they can also indirectly impact it by (2) ‘completing’
tasks. Finally, counterfactuals can be used to (3) re-
define the behavior space to decouple it from a sta-
tionary environment. Each of these changes in the
agent’s perception injects structured diversity to im-
prove the overall policy search.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
44

3.2 Counterfactual State Space
Counterfactuals impact the agent’s state space in two
ways. First, they are perceived by the learning agent’s
sensors as agents in the environment. This allows the
agent to learn the impact of simple behaviors, such as
moving closer to or further from other agents. Coun-
terfactuals can also impact the completeness of tasks
in the environment but only through the perceptions
of the learning agent. This leads to the definition of
the learning agent’s state as described in Equation 1
where the state, s, is defined by the ground truth state
of the world, s
w
, and the superimposed counterfactual
state, s
c
.
s = s
w
+ s
c
(1)
Agent sensors provide a summary of the distance,
d
a
, to any real agents, a ∈ A, within the sensor range in
a given region, r, as shown in equation 2. Counterfac-
tual agents, c ∈ CF, are added in the same manner, as
shown in the highlighted portion of Equation 2. In this
work, we do not consider other non-counterfactual
agents, a.
d
rA
=
∑
a∈r
1
d
a
+ 1
+
∑
c∈r
1
d
c
+ 1
(2)
Agent sensors also summarize the distance, d, and
completion percentage, p, for tasks of a given group,
t ∈ T
g
, in a region, r. This is shown in Equations 3
and 4, respectively. Counterfactuals, c ∈ CF, can im-
pact the completeness of each task, shown in the high-
lighted region of Equation 4. Once again, the coun-
terfactual agents impact on task completion is only re-
flected in the learning agent’s state space; counterfac-
tual agents cannot directly contribute to the rewards
earned by the learning agent.
d
rg
=
∑
t∈r
1
d
t
+ 1
(3)
p
rg
=
∑
t∈r
p
ta
+
∑
t∈r
p
tc
(4)
where t ∈ T
g
, a ∈ A, c ∈ CF
Collectively, equations 2, 3, and 4 combine to cre-
ate the agent’s state, s. The highlighted portions of
these equations denoted with the subscript c form the
counterfactual state, s
c
, while the rest makes up the
world state, s
w
as seen in Equations 6 and 5, respec-
tively. In Equation 5, b is a state variable representing
the agent’s current battery level. This provides a con-
straint on the agent, forcing it to be strategic about
how it competes tasks.
s
w
=
"
∑
a∈r
1
d
a
+ 1
"
∑
t∈r
1
d
t
+ 1
∑
t∈r
p
ta
#
g
b
#
(5)
s
c
=
"
∑
c∈r
1
d
c
+ 1
0
∑
t∈r
p
tc
g
0
#
(6)
3.3 Counterfactual Behavior Space
Counterfactual agents enable C-MOME to more
richly define agent behaviors allowing for broader be-
havioral diversity. By incorporating counterfactuals
into the state space, agents are able to detect and react
to the perceived actions and behaviors of counterfac-
tual agents. The behavior space is defined to capture
the diverse ways in which the learning agent can react
to these counterfactuals.
Similar to the state space, the behavior space, beh,
is defined by the agent’s behaviors in the world, beh
w
,
and the agent’s behaviors in relation to the counter-
factuals, beh
c
.
beh = [beh
w
, beh
c
] (7)
The counterfactual behavior space, beh
c
, includes
summary statistics of the distance from the agent to
the counterfactual agents. This is summarized using
three different variables: the closest the agent got to
a counterfactual, the furthest an agent got away from
a counterfactual, and the average distance to all coun-
terfactuals across an episode.
beh
c
=
h
min(d
c
), max(d
c
),
¯
d
c
i
(8)
4 EXPERIMENTAL SETUP
In this work, we test C-MOME in a continuous, multi-
objective observation problem where an agent must
observe different types of targets. Exploration of each
type of target is considered a separate task (or objec-
tive). While the overall goal is for the agent to com-
plete as many tasks as possible, the agent has to bal-
ance different, competing objectives by observing dif-
ferent task types during its mission.
Objectives are defined by how complete tasks are
in each task group, T
g
. The fitness calculation for each
objective is the sum of the completion percentage of
each task of a given type as described in Equation 9.
In this work, we use two task groups and therefore
have two objectives to optimize over. We note that
it is not possible for the agent to complete 100% of
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites
45

the tasks within the time provided. This is an inten-
tional quality of the environment, as the agent must
be strategic about how to spend its time and balance
the tasks it aims to accomplish.
F
g
=
∑
t∈T
g
p
t
(9)
4.1 Learning Agents
Learning agents have two sets of sensors, one set de-
tects agents and the other detects tasks. Agents have
four sensors of each type to collect information within
four quadrants of a 360 degree circular area centered
around the agent. The agent’s state includes one in-
put for each agent sensor that detects the distance to
other agents in each region. The agent’s state also in-
clude two inputs for each task sensor that detects task
completeness and the distance to tasks; each task type
has a separate set of sensors. One additional sensor
input defines the current charge of the agent’s battery
(b). These collectively become the learning agent’s
state, s
w
. The counterfactual state, s
c
, is added to
the learning agent’s state in order to more richly de-
fine the agent’s behavior. An agent’s sensors collect
state information defining s
w
and s
c
(Equations 5 and
6).
The learning agent is represented by a neural net-
work policy with a single hidden layer (30 nodes).
Using this policy, the agent selects which region to go
toward, which task type to accomplish in that region,
how much effort to put into that task, and its velocity,
v. A separate navigation policy navigates the agent to
the closest task of the chosen type in that region. In
this work, we assume the agent has optimized naviga-
tion and control policies for travelling between differ-
ent tasks in the environment. The battery is drained
at a rate of the velocity squared, so the agent must
balance speed and energy (Equation 10).
The agent outputs two variables that determine
how much effort it puts in to the chosen task, e
0
and
e
1
. The battery, b, drains at the rate of their product
(Equation 10), and the product of these two scalars
adds to the task’s completion percentage, p
t
, up to
100% (Equation 11).
b
0
= b − v
2
− (e
0
∗ e
1
)
(10)
p
0
t
= p
t
+ (e
0
∗ e
1
) (11)
4.2 Behavior Space
The tasks in this problem form the baseline for defin-
ing the behavior space used by MOME. The behav-
iors are direct outputs from the agent’s policy, namely
the velocity, v, and effort, e
0
and e
1
. The behavior
space is defined as the mean of each of variable across
an episode, separated by task group g. For our im-
plementation, we test with two task groups creating a
6-dimensional behavior space (Equation 12).
beh
no
= beh
w
= [[ ¯e
0,g
, ¯e
1,g
, ¯v
g
] ∀g] (12)
For C-MOME, we reduce the world behavior
space (beh
w
) to two dimensions by taking the mean
of all three variables for each group in (Equation 12).
As a result, the behavior space with counterfactuals
is 5-dimensional: two task groups in beh
w
and three
summary statistics in beh
c
(Equation 8). We do this
to make the behavior space dimensions more closely
aligned and comparable in the cases with and without
counterfactuals (5 vs 6 dimensions).
beh
CF
=
beh
w
beh
c
=
"
[ ¯e
0,g
, ¯e
1,g
, ¯v
g
] ∀g
min(d
c
), max(d
c
),
¯
d
c
#
(13)
4.3 Counterfactual Parameters
To gain a more thorough understanding of how coun-
terfactual agents impact both the behavior space and
objective space in C-MOME, we test a number of dif-
ferent parameters that dictate the creation of coun-
terfactual agents. First, we test how different types
of counterfactual agents impact performance (Section
5.2). We evaluate C-MOME with Static counterfac-
tual agents that are present in the environment but do
not move, Move counterfactuals where counterfactual
agents move but do not effect task completion within
the learning agent’s state space, and Task counterfac-
tuals where counterfactual agents move and impact
task completion. Next, we analyze how the number
of counterfactual agents impacts performance (Sec-
tion 5.3). Finally, we test how adding counterfactuals
to three different portions of the agent’s perception
impacts the overall search (Section 5.4). In the state,
counterfactuals can (1) impact task completion or (2)
appear as agents; they can also impact (3) the defini-
tion of the behavior space. In each experiment, we
compare against MOME which has no counterfactual
agents to form a baseline for comparison.
When there are no counterfactuals (MOME), the
state is defined by the true world state, s
w
, and the
behavior space is defined by the agent’s interactions
with the world, beh
w
(Equations 5 and 12). With
counterfactuals (C-MOME), the counterfactual infor-
mation is injected in the state space, s
w
+ s
c
, and the
behavior space beh
w
+ beh
c
(Equations 6 and 13) un-
less otherwise noted.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
46

4.4 Experimental Parameters
We run experiments in the multi-objective exploration
problem in a 20x20, 2D continuous environment. The
learning agent starts at a randomized position within
one unit of the center of the map. The agent can move
at up to 2 units per time step; the speed at each time
step is determined by the velocity output, v, multi-
plied by the max speed. Learning agents have a bat-
tery life of 30 units at the start of each episode and
episodes last for 50 time steps. Counterfactuals move
at one unit per time step. Each counterfactual has a
randomly generated list of tasks they visit in order.
There are 16 tasks in the environment that are laid
out in a circle with a radius of 6 units with alternating
types; the position of each task is randomly perturbed
by up to 1 unit in the x and y-directions. Agents
can interact with any task less than 2 units away, and
counterfactual agents can interact with any task up to
1 unit away. All results are averaged across 20 statis-
tical runs unless otherwise stated. Error is reported as
the standard error in the mean.
5 RESULTS
In this work, we compare C-MOME against two
baseline methods representing the state-of-the-art in
multi-objective and QD search: Multi-Objective Map
Elites (MOME) (Pierrot et al., 2022) and Nondomi-
nated Sorting Genetic Algorithm II (NSGA-II) (Deb
et al., 2002). C-MOME builds on the MOME frame-
work by using counterfactual agents to shape the state
and behavior spaces of the search. By comparing
C-MOME with MOME, we characterize the impact
counterfactuals have on both the coverage of behav-
ioral niches within the behavior space and the cov-
erage of policies along the global Pareto front in the
objective space. Comparing C-MOME with NSGA-II
characterizes the performance of this method against
an algorithm that is considered state-of-the-art in
multi-objective search. We expand our study on the
positive impact of counterfactual states by adding
counterfactual agents to the agent’s state space in
NSGA-II.
5.1 Performance Measures
To test the overall performance of each method, we
compare them in both the objective space and the be-
havior space. The work introducing MOME, (Pierrot
et al., 2022), uses the hypervolume of the Pareto front
to test the quality of the multi-objective search. The
hypervolume measures the volume of the geometric
Figure 2: This compares the effects of different types of
counterfactual agents on the hypervolume of the Pareto
front. Results show the final Pareto hypervolume found af-
ter testing 200,000 policies per run, averaged over 20 stat
runs. Move and Task counterfactuals result in a greater hy-
pervolume compared to Static counterfactuals and MOME
(No cf).
shape created by the points on the Pareto front along
with a reference point; we use [0, 0] for our compar-
isons. Note that in a 2D objective space, this equates
to the area of the polygon created by the Pareto front
and the origin. For the behavior space, we compare
the percent of niches filled by each method. When
plots are shown for individual runs, such as for the
Pareto front, we chose a run that was closest to the
mean.
5.2 Counterfactual Types
First, we examine how different types of counterfac-
tuals perform in C-MOME compared with MOME.
As outlined in Section 4.3, we test Static, Move, and
Task counterfactual types. For this test, we use 9
counterfactual agents for each type. These results are
summarized in Figure 2.
The results in Figure 2 demonstrate that Static
counterfactual agents have a small impact on perfor-
mance. This is a positive result, as Static counterfac-
tuals do not express unique behaviors that can effec-
tively redefine the behaviors of a learning agent. This
result shows that the change in behavior space defi-
nition, beh
no
to beh
c f
, and the inclusion of agents in
the state provides some benefit. Similarly, we see that
the hypervolume impact of Task counterfactuals com-
pared with Move counterfactuals is also negligible.
However, we see a noticeable increase in performance
between having no counterfactuals or static counter-
factuals and counterfactuals that move. The Move and
Task counterfactuals both show significant improve-
ment of the final Pareto hypervolume, increasing it by
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites
47
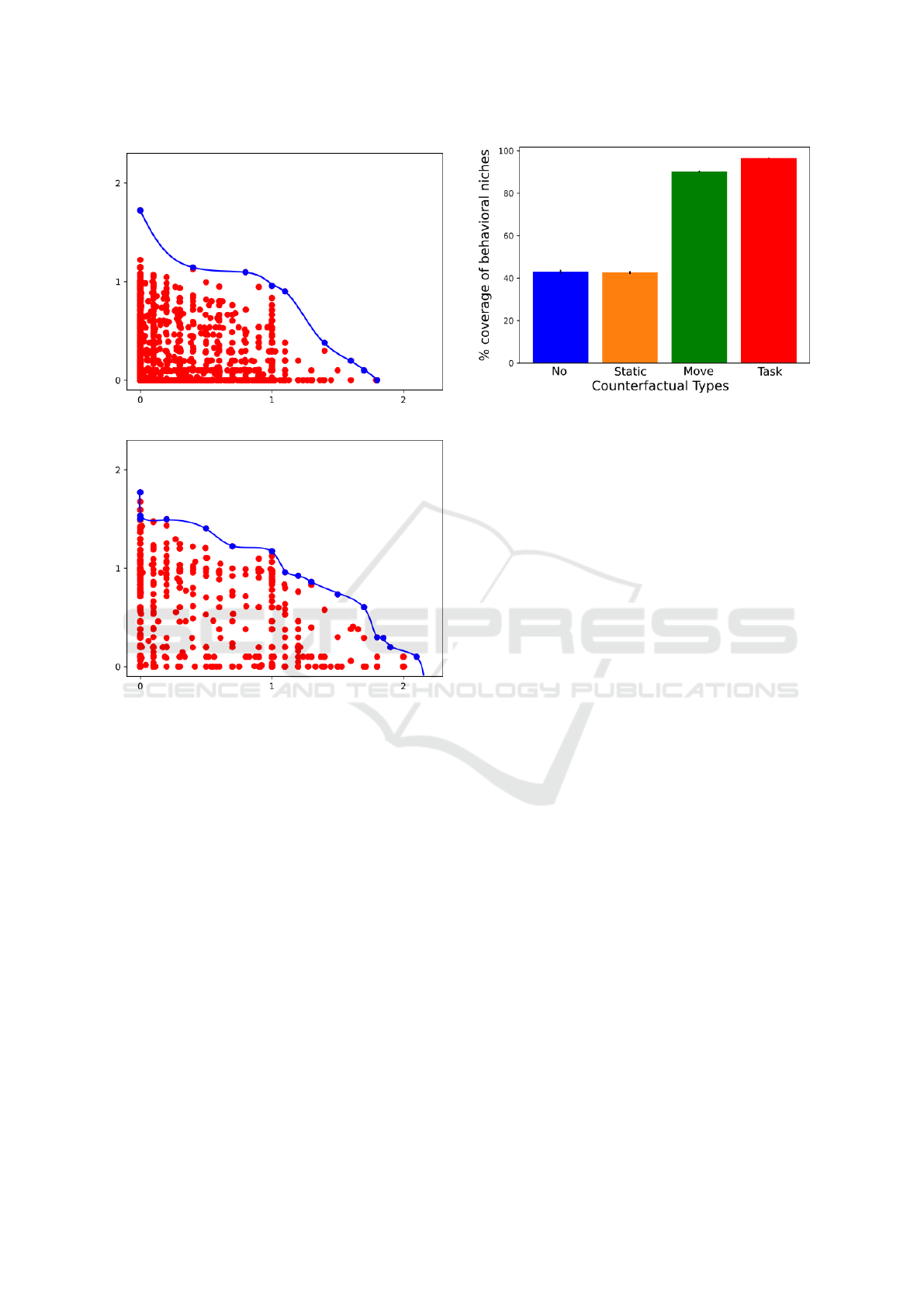
(a) MOME Pareto Front
(b) C-MOME Pareto Front
Figure 3: Representative global Pareto fronts found af-
ter searching through 200,000 policies for MOME and
C-MOME with Task counterfactuals. Policies that are
Pareto dominant are represented as blue dots while non-
Pareto dominant policies are in red. The counterfactual
agents used in C-MOME result in a greater coverage of
Pareto optimal policies compared with MOME and keeps
significantly fewer policies in unhelpful regions, near [0, 0].
These graphs were chosen as representatives because they
are closest to the mean for their population.
over 40%, each with approximately 3% standard error
after 20 stat runs.
While measuring the hypervolume characterizes
the coverage of the Pareto front as a whole, we also
show examples of typical Pareto fronts generated by
MOME (no counterfactuals) and C-MOME with Task
counterfactuals in Figures 3a and 3b, respectively.
These plots provide a more detailed view of how the
introduction of moving, counterfactual agents can re-
define the behavior space resulting in more substan-
tial policies along the global Pareto front. These also
highlight how MOME spends significant time search-
ing a sub-optimal region, near [0, 0], while C-MOME
Figure 4: Comparing the effect of different types of coun-
terfactual agents on the coverage of behavioral niches. We
show that Move and Task counterfactuals successfully cover
more than twice the area of the behavior space, with Task
cfs achieving over 95% coverage.
is able to spread the search across the objective space.
Impact on Behavior Space: To characterize the
impact counterfactuals have on the behavior space
within MOME, we measure the total number of
niches that contain policies. Note that for these re-
sults, we do not include counterfactuals in the behav-
ior space and use beh
w
for all cases. This is done to
make the results directly comparable, as the counter-
factual behavior space, beh
c
, has significantly differ-
ent constraints. By comparing the amount of “filled”
niches to the total number of niches, we can estimate
the total coverage of policies over the behavior space.
We present these findings in Figure 4. The total num-
ber of niches filled by C-MOME is 2.3x the number
of niches filled by MOME (with no counterfactuals).
This result shows that C-MOME leverages the struc-
tured diversity provided by counterfactuals to provide
significantly better coverage of both the behavior and
objective spaces.
Compared against both MOME and C-MOME
with Static counterfactuals, dynamic counterfactuals
improve the overall search in the objective space.
By comparing against the Static counterfactuals, we
show that the redefinition of the behavior space and
inclusion of additional information in the state is not
what causes the improvement. The dynamic coun-
terfactuals provide structured variability in the envi-
ronment, which allows C-MOME to more richly de-
fine agent behaviors and effectively cover the behav-
ior space as seen in Figure 4. This diversifies the
search across the behavior space, which in turn im-
proves the performance in the objective space.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
48
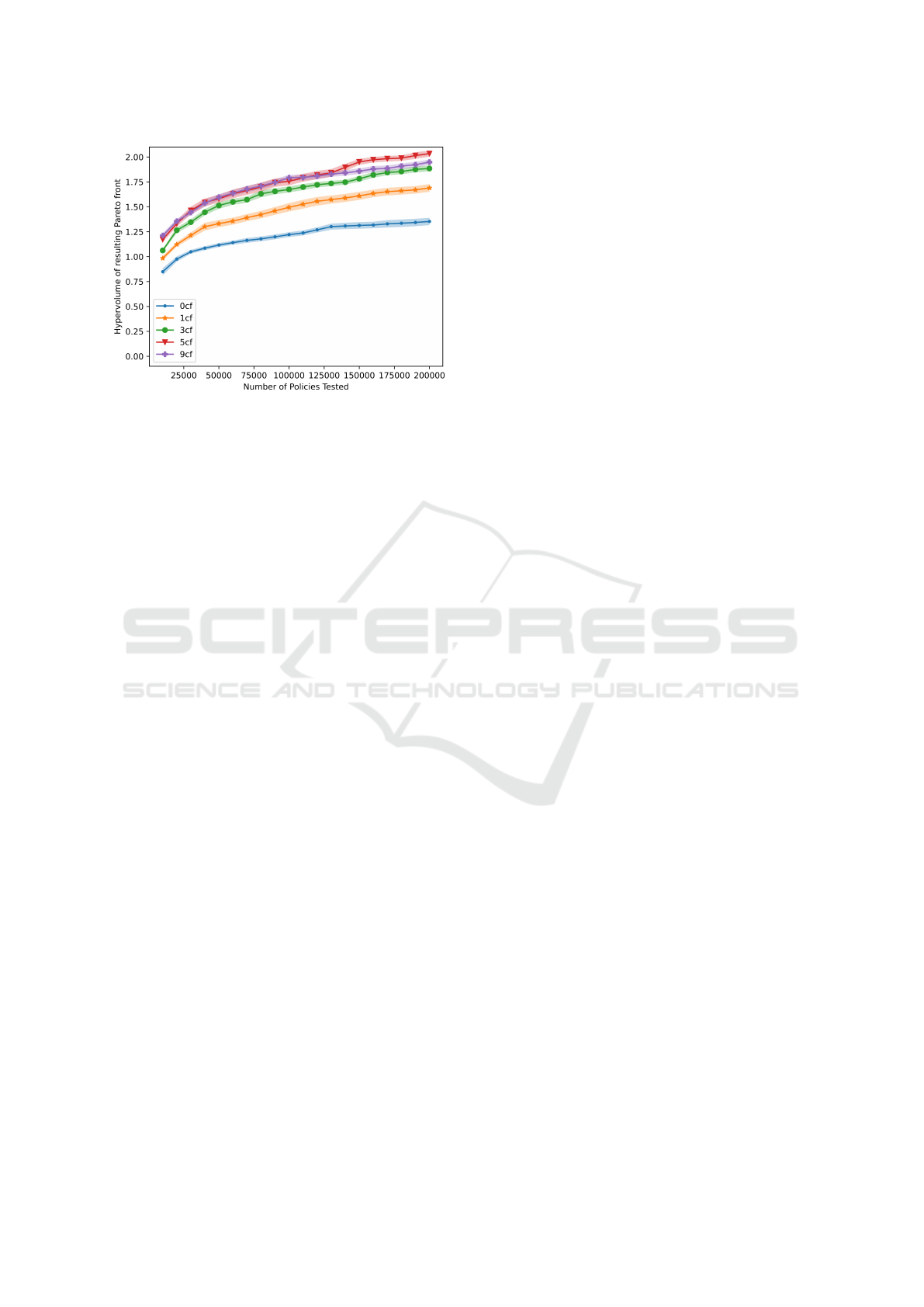
Figure 5: Comparing the impact of different numbers of
Task counterfactual agents on the hypervolume of the global
Pareto front. Increasing the number of counterfactual agents
results in an increase in the total hypervolume. However,
the gain in hypervolume becomes less significant as more
agents are added beyond 5 agents.
5.3 Number of Counterfactual Agents
In testing the type of counterfactuals used in
C-MOME, we found that dynamic counterfactual
agents resulted in a marked increase in the hyper-
volume of the global Pareto front. To further under-
stand the effect counterfactual agents have on learn-
ing and shaping the behavior space, we also examine
the number of counterfactual agents used. Using Task
counterfactuals we tested all cases from 0 to 9 Task
counterfactual agents and found that hypervolume in-
creases with more counterfactual agents; however, it
does so incrementally. We show a representative sam-
pling of these results in Figure 5 where, for simplicity,
we present the results for 0, 1, 3, 5, and 9 counterfac-
tuals.
In Figure 5, we see a larger initial increase in hy-
pervolume when we compare MOME with no coun-
terfactuals against C-MOME with 1 counterfactual.
The hypervolume between 1 counterfactual and 5
counterfactuals is also relatively large; however, the
rate of hypervolume increase for each added agent di-
minishes after 5 agents.
Impact on Behavior Space: We see a similar trend
when comparing the impact of the number of counter-
factual agents on the behavior space coverage. Figure
6 shows a visual representation of two dimensions of
the behavior space for 0, 1, and 9 counterfactuals. The
No cf case achieves 40.1% coverage of the behavior
space, 1 CF achieves 67.8%, and the 9 Task CFs is
able to cover 96.6%. We found this trend holds across
all tests run from 0 to 9 agents.
5.4 Counterfactuals Shaping Perception
As presented in Section 3, there are three distinct
ways in which counterfactuals impact agent percep-
tions. As part of the state, counterfactuals can im-
pact the (1) percieved task completion or (2) appear
as agents. Additionally, counterfactuals can impact
(3) the definition of the behavior space. We explored
the impact of these three factors on the performance
of C-MOME. These results are presented in Figure 7
and Table 1.
These results show that each of the three compo-
nents have a moderate impact on the hypervolume of
the pareto front. The most surprising result is that
the behavior definition has a small impact alone, but
when combined with either the task completion or
agent state, it has a significantly better impact. Over-
all we show that the synergy of all three is what pro-
vides the best coverage of the objective space, and
therefore the best policies.
5.5 Counterfactuals in MOME and
NSGA-II
The previous results demonstrate the impact counter-
factual agents have on shaping the behavior space in
MOME. To gain a better understanding of overall
performance within MOO, we also compare MOME,
C-MOME, NSGA-II, and NSGA-II with counterfac-
tuals. While the counterfactuals in C-MOME are pri-
marily used to redefine the behavior space, NSGA-II
does not rely on a behavior space. Therefore, the
counterfactual states we add to NSGA-II only have an
impact on the state space of the learning agent. Sim-
ilar to the counterfactuals in C-MOME, the counter-
factual agents do not impact the objectives.
We first explore the effect of counterfactuals in
NSGA-II by testing the types of counterfactuals de-
fined in Section 4.3. We plot the effect these coun-
terfactuals have on NSGA-II hypervolume in Figure
8. Similar to the trends observed in C-MOME, we
see that dynamic counterfactual agents lead to an in-
crease in the hypervolume of the global Pareto front.
However, unlike in C-MOME, the results indicate no
change in hypervolume with static counterfactuals.
We also include the hypervolume comparison be-
tween MOME, C-MOME, and NSGA-II in Figure 8.
Overall we see that NSGA-II outperforms MOME in
this task with a substantial increase in the hypervol-
ume of the global Pareto front. We also see that Task
counterfactuals in both MOME and NSGA-II leads to
a significant increase in hypervolume. It is worth not-
ing that NSGA-II only solves half of the originally
stated problem, as it provides diversity across the ob-
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites
49

(a) No CF Behavior Space
(b) 1 CF Behavior Space
(c) 9 CFs Behavior Space
Figure 6: Representative behavior spaces found after searching through 200,000 policies for the No CF (Fig. 6a), 1 Task CF
(Fig. 6b), and 9 Task CFs (Fig. 6c) cases. Niches that have a policy that is globally Pareto optimal are represented in purple;
the color scales to yellow as the policies get further from the global Pareto front. All three cases use the beh
no
behavior space
in order to show a direct comparison. The No cf case achieves 40.1% coverage of the behavior space, 1 CF achieves 67.8%,
and the 9 Task CFs is able to cover 96.6%.
Table 1: Hypervolume of the Pareto front and coverage of the niches in the behavior space, broken down by configuration.
We present situations with 0 counterfactuals (MOME) or 9 counterfactuals (C-MOME). Note that we do not present niche
coverage results for the configurations that have counterfactuals in the behavior space; the behavior space is significantly
different and bounded, so the results are not comparable.
Perception Shaping Hypervolume Niche coverage
Num cf (1) Task p (2) Agent (3) Beh. Mean St.Err. Mean St.Err
0
- - - 1.281 0.079 0.401 0.0069
- • - 1.353 0.037 0.431 0.0084
9
- - - 1.298 0.025 0.420 0.0056
• - - 1.636 0.042 0.884 0.0029
- • - 1.709 0.027 0.902 0.0030
- - • 1.414 0.032 - -
• • - 1.862 0.036 0.966 0.0015
• - • 1.831 0.037 - -
- • • 1.925 0.028 - -
• • • 1.949 0.027 - -
jective space but not across the behavior space.
Although NSGA-II does not use a behavior space
for discovering new policies, the process of adding
counterfactual agents to the learning agent’s state
space had a noticeable impact on the hypervolume.
This result mirrors the study of the impact of coun-
terfactuals in agent perceptions, outlined in Section
5.4. It also reinforces the power of counterfactuals,
given that they do not have a direct impact on re-
ward functions or objective measures. We believe
this increase in performance is the result of struc-
tured dynamic elements added by the counterfactual
agents. The added counterfactual dynamics in the
state space helps NSGA-II avoid local minima when
assessing the fitnesses of various policies during the
policy search.
6 CONCLUSION
In this work we introduce C-MOME, a novel ex-
tension to MOME that uses counterfactual agents to
better define agent behaviors thus shaping the be-
havior space. This shaped behavior space enables
C-MOME to more richly define agent behaviors,
diversify the search in the behavior and objective
spaces, and bias the search toward more productive
regions. We explored how different types of counter-
factual agents can influence both the behavior space
within MAP-Elites, and the coverage of policies along
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
50
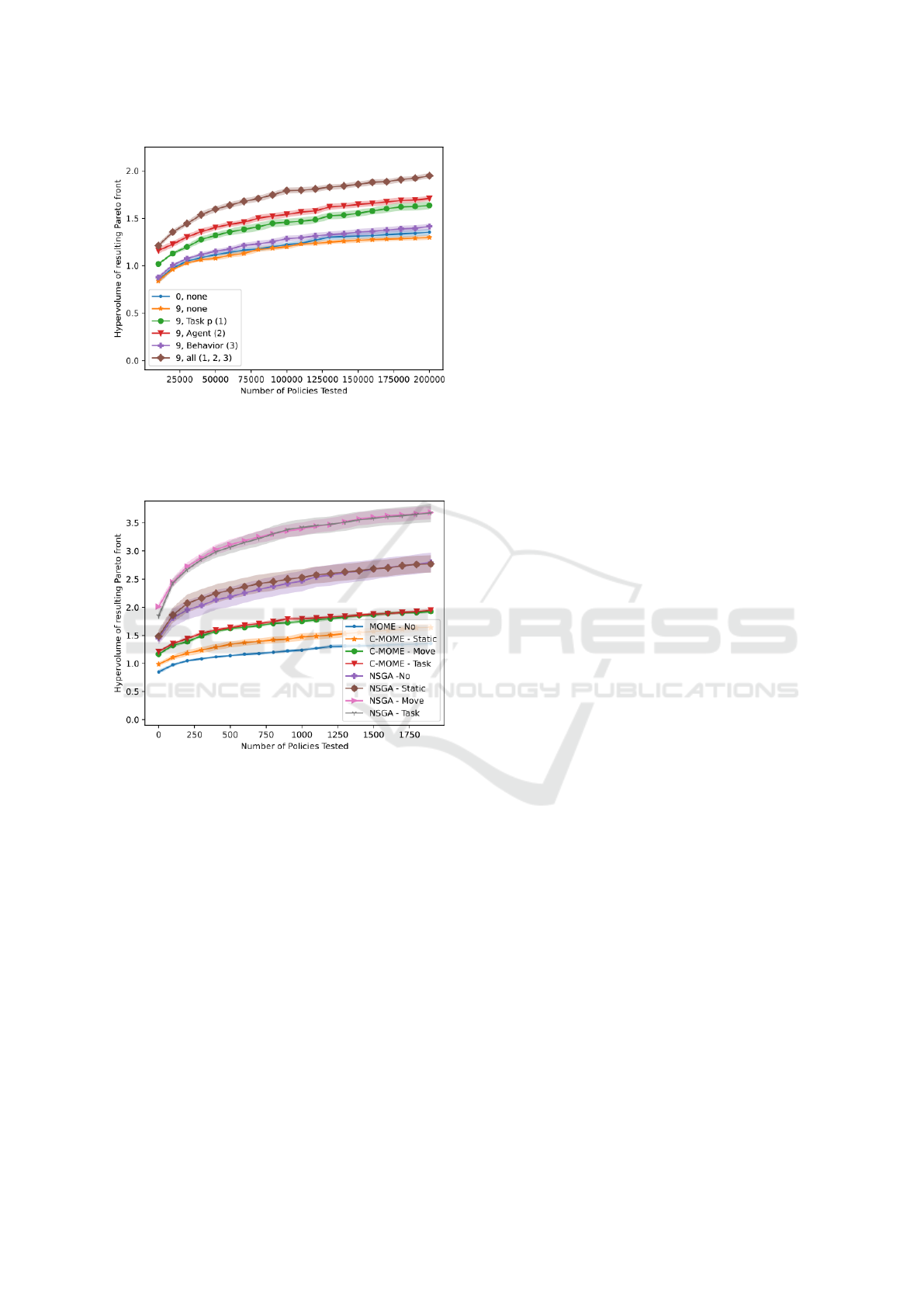
Figure 7: Comparing the impact of including counterfacu-
tals in the learning agents’ perceptions. In the state, coun-
terfactuals can (1) impact task completion or (2) appear as
agents; they can also impact (3) the definition of the behav-
ior space.
Figure 8: Comparing the effect of different counterfactual
types on NSGA-II. Similar to C-MOME, Move and Task
counterfactuals have a significant impact on hypervolume.
Unlike C-MOME, the static counterfactuals have no impact
on hypervolume instead of a minimal impact.
the global Pareto front. We found that dynamic coun-
terfactual agents led to an increase in the hypervol-
ume along the global Pareto front, filling over 96%
of the niches of the behavior space; MOME is only
able to achieve 40% coverage. Finally, in comparing
MOME and NSGA-II, we found that NSGA-II out-
performed this implementation of MOME. However,
adding dynamic counterfactual agents improved the
performance of NSGA-II despite it relying on policy
search through the objective space.
This work demonstrates the impact of adding
counterfactual agents into a single agent MOO prob-
lem. C-MOME is intended to be the preliminary
learning phase in a curriculum style approach to mul-
tiagent, multi-objective coordination. By reducing the
learning of policies to a single agent problem, we de-
crease the noise typically associated with a multia-
gent learning environment, which simplifies learning
enough to focus on the challenge of discovering a di-
verse set of policies that can balance multiple objec-
tives. Although the counterfactual agents are repre-
sentative of learning in an environment where multi-
ple agents are acting, it cannot fully account for real
agents that impact all aspects of the system. Future
work will extend C-MOME via curriculum learning
with the next step focusing on coordination and team
formation.
ACKNOWLEDGEMENTS
This work was partially supported by the National
Science Foundation under grant IIS-2112633 and the
Air Force Office of Scientific Research under grant
No. FA9550-19-1-0195.
REFERENCES
Agogino, A. and Tumer, K. (2004). Efficient evaluation
functions for multi-rover systems. In Genetic and
Evolutionary Computation – GECCO 2004, volume
3102, pages 1–11, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Alitappeh, R. J. and Jeddisaravi, K. (2022). Multi-robot
exploration in task allocation problem. Applied Intel-
ligence, 52(2):2189–2211.
Boninger, D. S., Gleicher, F., and Strathman, A. (1994).
Counterfactual thinking: From what might have been
to what may be. Journal of personality and social psy-
chology, 67(2):297.
Burgard, W., Moors, M., Stachniss, C., and Schneider, F. E.
(2005). Coordinated multi-robot exploration. IEEE
Transactions on robotics, 21(3):376–386.
Byrne, R. M. (2016). Counterfactual thought. Annual re-
view of psychology, 67:135–157.
Coello Coello, C. A. (2006). Evolutionary multi-objective
optimization: A historical view of the field. Comp.
Intell. Mag., 1(1):28–36.
Das, I. and Dennis Jr, J. E. (1996). A closer look at
drawbacks of minimizing weighted sums of objectives
for pareto set generation in multicriteria optimization
problems. Technical report.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. Trans. Evol. Comp, 6(2):182–197.
Drugan, M. M. and Nowe, A. (2013). Designing multi-
objective multi-armed bandits algorithms: A study. In
The 2013 international joint conference on neural net-
works (IJCNN), pages 1–8. IEEE.
Shaping the Behavior Space with Counterfactual Agents in Multi-Objective Map Elites
51

Eysenbach, B., Gupta, A., Ibarz, J., and Levine, S. (2019).
Diversity is all you need: Learning skills without a re-
ward function. In International Conference on Learn-
ing Representations.
Foerster, J. N., Farquhar, G., Afouras, T., Nardelli, N.,
and Whiteson, S. (2018). Counterfactual multi-
agent policy gradients. In Proceedings of the Thirty-
Second AAAI Conference on Artificial Intelligence
and Thirtieth Innovative Applications of Artificial In-
telligence Conference and Eighth AAAI Symposium
on Educational Advances in Artificial Intelligence,
AAAI’18/IAAI’18/EAAI’18. AAAI Press.
Johansson, F. D., Shalit, U., and Sontag, D. (2016). Learn-
ing representations for counterfactual inference. In
Proceedings of the 33rd International Conference on
International Conference on Machine Learning - Vol-
ume 48, ICML’16, page 3020–3029. JMLR.org.
Kasirzadeh, A. and Smart, A. (2021). The use and misuse
of counterfactuals in ethical machine learning. In Pro-
ceedings of the 2021 ACM Conference on Fairness,
Accountability, and Transparency, FAccT ’21, page
228–236, New York, NY, USA. Association for Com-
puting Machinery.
Kusner, M., Loftus, J., Russell, C., and Silva, R. (2017).
Counterfactual fairness. page 4069–4079.
Lehman, J. and Stanley, K. O. (2011). Novelty search and
the problem with objectives. Genetic programming
theory and practice IX, pages 37–56.
Mouret, J.-B. and Clune, J. (2015). Illuminating
search spaces by mapping elites. arXiv preprint
arXiv:1504.04909.
Olson, M. L., Khanna, R., Neal, L., Li, F., and Wong, W.-
K. (2021). Counterfactual state explanations for rein-
forcement learning agents via generative deep learn-
ing. Artificial Intelligence, 295:103455.
Pierrot, T., Richard, G., Beguir, K., and Cully, A. (2022).
Multi-objective quality diversity optimization. In Pro-
ceedings of the Genetic and Evolutionary Computa-
tion Conference, GECCO ’22, page 139–147, New
York, NY, USA. Association for Computing Machin-
ery.
Rahmattalabi, A., Chung, J. J., Colby, M., and Tumer, K.
(2016). D++: Structural Credit Assignment in Tightly
Coupled Multiagent Domains. In 2016 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 4424–4429, Daejeon, South Ko-
rea. IEEE.
Van Moffaert, K., Drugan, M. M., and Now
´
e, A. (2013).
Scalarized multi-objective reinforcement learning:
Novel design techniques. In 2013 IEEE Symposium on
Adaptive Dynamic Programming and Reinforcement
Learning (ADPRL), pages 191–199.
Verma, S., Boonsanong, V., Hoang, M., Hines, K. E., Dick-
erson, J. P., and Shah, C. (2020). Counterfactual
explanations and algorithmic recourses for machine
learning: a review. arXiv preprint arXiv:2010.10596.
Zitzler, E., Laumanns, M., and Thiele, L. (2001). Spea2:
Improving the strength pareto evolutionary algorithm.
TIK-report, 103.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
52
