
Hybrid LSTM-Fuzzy System to Model a Sulfur Recovery Unit
Jorge S. S. J
´
unior
1 a
, J
´
er
ˆ
ome Mendes
2 b
, Francisco Souza
3 c
and Cristiano Premebida
1 d
1
University of Coimbra, Institute of Systems and Robotics, DEEC, Coimbra, Portugal
2
University of Coimbra, CEMMPRE, ARISE, Department of Mechanical Engineering, Coimbra, Portugal
3
Radboud University, Dept. Analytical Chemistry & Chemometrics, 6525 AJ Nijmegen, The Netherlands
Keywords:
Neo-Fuzzy Neuron System, Long Short-Term Memory, Industrial Processes, Interpretability.
Abstract:
Dealing with the dynamics of an industrial process using machine learning techniques has been a paradigm
throughout decades of technological advancement. Motivated by addressing this problem, the present work
proposes the hybridization of a neo-fuzzy neuron system (NFN) with a long short-term memory network
(LSTM), the NFN-LSTM model. The fuzzy part guarantees interpretability through linguistic terms asso-
ciated with membership functions that allow an effective mapping of the input variables in its universe of
discourse with respect to the output. On the other hand, the LSTM part explores high-level representations
useful for sequential data in dynamic processes. In this work, a sulfur recovery unit is used as a case study,
whose dynamics are mainly associated with peak values in the estimation of residual hydrogen sulfide. The
proposed NFN-LSTM model is compared with state-of-the-art methods, such as standalone LSTM, GAM-
ZOTS (generalized additive models using zero-order Takagi-Sugeno fuzzy system), iMU-ZOTS (extension of
GAM-ZOTS), ALMMo-1 (autonomous learning of a multimodel system from streaming data), iNoMO-TS
(iterative learning of multivariate fuzzy models using novelty detection), and SVR (support vector regression).
Analyzing the results, the proposed model performed similarly to standalone LSTM, and both outperformed
the other methods. Finally, NFN-LSTM manages to balance interpretability and accuracy.
1 INTRODUCTION
The reliability and explainability of artificial intelli-
gence (AI) models applied to modeling industrial pro-
cesses are pivotal to increasing the adoption of AI
in Industry 4.0 (Souza et al., 2022). The advent of
complexity and nonlinearity in modern industrial sys-
tems requires computational technologies to grow at
the same pace. However, the rapid progress of AI has
led to very complex models, the majority of which are
difficult to understand and explain. As a result, these
models lack a connection with human operators, mak-
ing it challenging to support reasoning or enhance un-
derstanding of the process.
It is common to see Deep Learning (DL) solu-
tions widespread in modeling complex nonlinear pro-
cesses, mainly due to the capacity to achieve high
levels of data representation. For example, in (Yuan
et al., 2020) the authors employed a long short-term
a
https://orcid.org/0000-0001-6263-3602
b
https://orcid.org/0000-0003-4616-3473
c
https://orcid.org/0000-0001-6362-9349
d
https://orcid.org/0000-0002-2168-2077
memory network (LSTM) to learn quality-relevant
hidden dynamics of a penicillin fermentation process
and a debutanizer column. The study in (Guo et al.,
2021) proposes a soft sensor based on the denoising
autoencoder (DAE) and mechanism-introduced gated
recurrent units (MGRUs) whose performance is vali-
dated by predicting the rotor thermal deformation of
a rotary air preheater. Although the two DL models
follow the dynamic trend of the outputs with good ac-
curacy (especially LSTMs), they can present a large
number of parameters and complexity that harm a
clear understanding of the extracted features and the
internal mechanism of the model (interpretability is-
sues) (Jiang et al., 2021).
Traditional machine learning techniques can also
be appreciated to model complex nonlinear processes
in a more interpretable way than DL. As a moti-
vation to reach interpretable models, an approach
called GAM-ZOTS was proposed in (Mendes et al.,
2019a) to learn univariate zero-order Takagi-Sugeno
(T-S) fuzzy models through a backfitting algorithm.
Then, an extension of the GAM-ZOTS was proposed
in (Mendes et al., 2019b), the iMU-ZOTS, where
S. S. Júnior, J., Mendes, J., Souza, F. and Premebida, C.
Hybrid LSTM-Fuzzy System to Model a Sulfur Recovery Unit.
DOI: 10.5220/0012165100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 281-288
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
281

the model learns iteratively, i.e., new fuzzy rules are
added using a novelty detection criterion which de-
tects if new data is not represented by the current
model.
The union of deep and traditional techniques can
be advantageous in exploring a balance between ac-
curacy and interpretability, resulting in a more reli-
able hybrid approach for application in sensitive ar-
eas such as industrial processes. The use of fuzzy
systems as a foundation to treat the interpretability
side exploits the universe of discourse of the input
data, easy notation readability, and a symbolic struc-
ture with comprehensible mapping of linguistic vari-
ables to fuzzy sets, despite suffering from accuracy
in many complex problems (Moral et al., 2021). The
survey in (J
´
unior et al., 2023) shows, through exam-
ples in the literature, that the combination of fuzzy
systems and deep learning (the deep fuzzy systems)
allows an effective trade-off between interpretability-
accuracy when dealing with the individual limitations
of DL and FS. This survey also shows the lack of ap-
propriate discussions in the literature about these hy-
brid models, as there is no consensus on how to quan-
tify or qualify the interpretability with potential fine
adjustments from the initial design of the models.
The present work proposes a neo-fuzzy neuron ar-
chitecture hybridized with LSTM, the NFN-LSTM
model, for regression problems in industrial pro-
cesses. The proposed model contributes to reach-
ing an effective interpretability-accuracy trade-off by
combining the good interpretability of the NFN model
and the accuracy of the LSTM. The fuzzy part of the
proposed model allows a mapping of the input-output
relations with the easy readability of what happens
globally in the system. On the other hand, the LSTM
part transforms the fuzzified variables to reach a high
level of representation that can follow the system’s
dynamics and express good accuracy. The case study
chosen for this work is the estimation of residual hy-
drogen sulfide in the tail stream of a sulfur recovery
unit, whose dynamics are perceived partly through
manual control of the gas and air flows by human op-
erators and partly through a closed-loop algorithm for
airflow.
The rest of the paper is structured as follows: Sec-
tion 2 presents the topics that underlie this study.
Then, the proposed hybrid approach of neo-fuzzy
neuron with LSTM is presented in Section 3. The
implementation and validation of the proposed NFN-
LSTM model are presented in Section 4. Finally, Sec-
tion 5 concludes the paper.
2 BACKGROUND
In this section, an overview of topics related to the
hybrid approach proposed in Section 3 will be pre-
sented, namely neo-fuzzy neuron (Section 2.1) and
Long Short-Term Memory networks (Section 2.2).
2.1 The Neo-Fuzzy Neuron Model
A neo-fuzzy neuron (NFN) system incorporates mul-
tiple univariate additive zero-order Takagi-Sugeno (T-
S) fuzzy systems represented by the following uni-
variate fuzzy rules (Yamakawa, 1992):
R
i
j
j
: IF x
j
(k) ∼ A
i
j
j
THEN y
i
j
j
(k) = θ
i
j
j
, (1)
where x(k) = [x
1
(k), ··· , x
n
(k)] are input variables for
the k −th sample (k = 1, ··· , K), R
i
j
j
(i
j
= 1, · ·· , N
j
;
j = 1, ··· , n) depicts the i
j
-th rule of j-th variable (for
a total of N
j
individual rules). The antecedent part
is defined by the linguistic terms A
i
j
j
through fuzzy
membership functions (MFs) µ
A
i
j
j
. The consequent
part is defined by θ
i
j
j
parameters that express the out-
put of the univariate model y
i
j
j
. Figure 1 exhibits the
diagram of the described NFN system.
ConsequentMF
Figure 1: Neo-fuzzy neuron system.
The output of a NFN comprises the sum of the ad-
ditive univariate models, where each model represents
an input variable x
j| j=1,···,n
:
y[x(k)] = y
0
+
n
∑
j=1
y
j
[x
j
(k)], (2)
with
y
j
[x
j
(k)] = y
0
j
+
N
j
∑
i
j
=1
ω
i
j
j
[x
j
(k)]θ
i
j
j
, (3)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
282
where y
0
is the bias of the global model, y
0
j
is the
bias of the individual model y
j
[x
j
(k)] ( j = 1, ··· , n),
ω
i
j
j
[x
j
(k)] is the normalized form of the membership
function µ
A
i
j
j
. Learning an NFN is often achieved us-
ing the backfitting algorithm, and the Least Squares
Method.
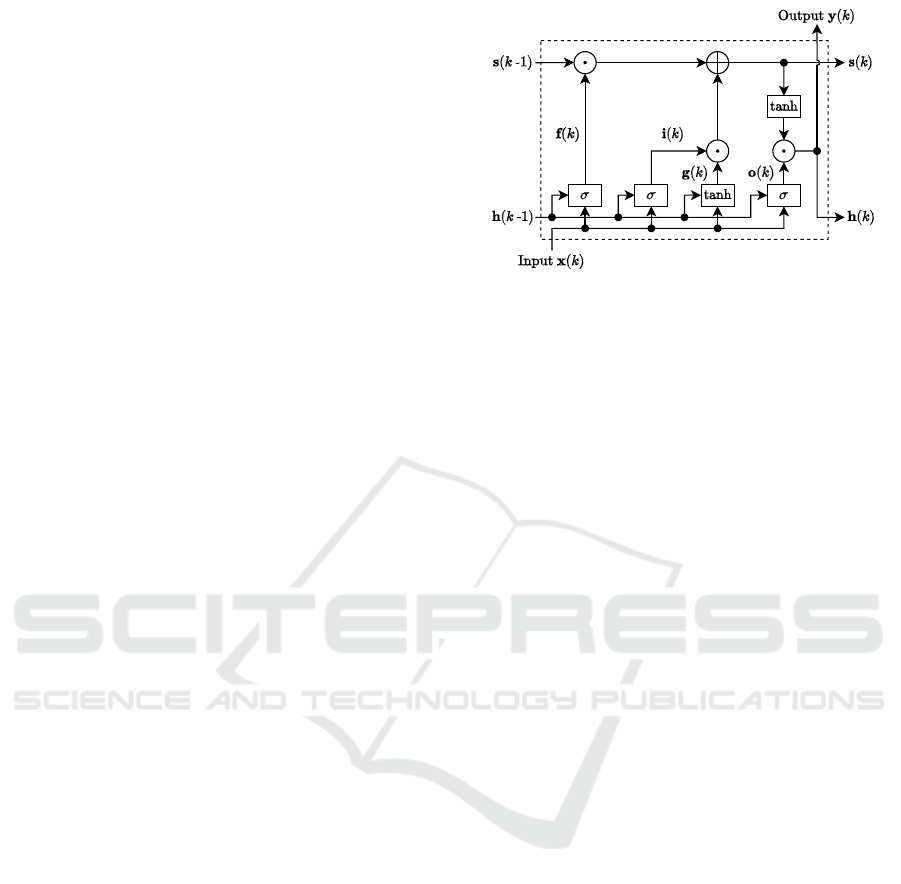
2.2 The Long Short-Term Memory
Networks
Long Short-Term Memory networks (LSTMs) were
developed in 1997 and are mainly used in model-
ing tasks that use long temporal sequences (Hochre-
iter and Schmidhuber, 1997; Goodfellow et al.,
2016). Sequential data in the time domain are
processed through nonlinear elements called gates.
These gates are commonly activated using sigmoidal
functions (deal with irrelevant inputs and irrelevant
memory contents) and hyperbolic tangent functions
(avoid vanishing/exploding gradients) (Zarzycki and
Ławry
´
nczuk, 2021).
The main formulations computed at instant k
within an LSTM with the structure illustrated in Fig-
ure 2 are (Zarzycki and Ławry
´
nczuk, 2021):
i(k) = σ
W
in
i
x(k) + W
h
i
h(k − 1) + b
i
, (4)
f(k) = σ
W
in
f
x(k) + W
h
f
h(k − 1) + b
f
, (5)
g(k) = tanh
W
in
g
x(k) + W
h
g
h(k − 1) + b
g
,(6)
o(k) = σ
W
in
o
x(k) + W
h
o
h(k − 1) + b
o
, (7)
s(k) = f(k) ⊙ s(k − 1) + i(k ) ⊙ g(k), (8)
h(k) = o(k) ⊙ tanh(s(k)), (9)
where i(k), f(k), g(k) and o(k) are input, forget, state
candidate and output gates, respectively, with respec-
tive recurrent weight matrices W
h
i
, W
h
f
, W
h
g
, W
h
o
, in-
put weight matrices W
in
i
, W
in
f
, W
in
g
, W
in
o
, and biases
b
i
, b
f
, b
g
, b
o
. The variables x(k), s(k ) and h(k) rep-
resent, respectively, the input, cell state and hidden
(output) vectors at k-th instant. The symbol ⊙ is the
Hadamard (element-wise) product of the vectors.
A standalone LSTM has an internal mechanism
that is difficult to interpret because it has a high num-
ber of parameters required for the ports, in addition to
making direct input-output mapping difficult to sim-
plify its structure without compromising performance
(Lees et al., 2022). One of the techniques used in the
literature to overcome the interpretability issue is the
attention mechanism that prioritizes the importance of
input features (Gandin et al., 2021; Liu et al., 2021).
Figure 2: Representation of the Long Short-Term Memory
(J
´
unior et al., 2023).
3 PROPOSED NFN-LSTM MODEL
3.1 Motivation
The need to develop a model that expresses reliabil-
ity in its internal functioning comes partly from ex-
ploring interpretability, which can be addressed by
fuzzy systems whose membership functions convey
the individual impact of inputs on output. Reliability
is also achieved when the model to be developed can
efficiently estimate characteristics of a given system,
such as dynamics and nonlinearity, with a high level
of accuracy. In this context, LSTMs can be used for
achieving such characteristics in systems represented
by temporal sequences, as stated in Section 2.2.
The literature on eXplainable Artificial Intelli-
gence (XAI) shows the difficulty in guaranteeing mu-
tual excellence between interpretability and accuracy,
therefore using the concept of a trade-off between
both that allows a balancing with potential to be
increasingly explored in the future (Angelov et al.,
2021; J
´
unior et al., 2023). Given this concept, the
present work proposes a new model that considers the
interpretability capacity of fuzzy systems and the ac-
curacy capacity of LSTMs in a hybrid structure.
3.2 NFN-LSTM Model
In this study, a LSTM network is implemented in a
hybrid way to the neo-fuzzy neuron system to reach
the representation portrayed in Figure 3, the NFN-
LSTM model. The resulting fuzzy rules of the pro-
posed NFN-LSTM model are expressed as:
R
i
: IF x
j
(k) ∼ A
i
j
j
THEN y
i
(k) = LSTM
i
· θ
i
, (10)
where R
i
(i = 1, ··· , N) represents the i-th fuzzy rule
for a total of N global rules. These rules consider
in ascending order each i
j
-th MF (i
j
= 1, ··· , N
j
) of
Hybrid LSTM-Fuzzy System to Model a Sulfur Recovery Unit
283

MF LSTM Consequent
Figure 3: Representation of the NFN-LSTM model.
each j−th variable ( j = 1, · ·· , n) according to Fig-
ure 3 (therefore N = n · N
j
). LSTM outputs are repre-
sented by parameters LSTM
i
that accompany the con-
sequent parameters θ
i
. The MFs used in the hybrid
model are of the complementary triangular form that
can be activated at the instant k in pairs (at most, for a
given input x
j
), i.e. (Silva et al., 2014):
N
j
∑
i
j
=1
µ
A
i
j
j
[x
j
(k)] = µ
A
i
j
j
[x
j
(k)] + µ
A
i
j
+1
j
[x
j
(k)] = 1.
(11)
The output of the hybrid model is expressed as:
y[x(k)] = y
0
+
N
∑
i=1
ω
i
f
i
[x
j| j=1,···,n
(k)], (12)
where y
0
is a bias and
ω
1
, ··· , ω
N
≡
h
ω
1
1
, ··· , ω
N
j
n
i
(13)
ω
i
j
j
≡ ω
i
j
j
[x
j
(k)] =
µ
A
i
j
j
[x
j
(k)]
∑
N
j
i
j
=1
µ
A
i
j
j
[x
j
(k)]
(14)
f
i
[x
j| j=1,···,n
(k)] = LSTM
i
(ω
1
1
, ··· , ω
N
j
n
) · θ
i
(15)
As noted in Section 2.2 and Figure 3, it becomes
an arduous task to try to establish a direct relation-
ship between the inputs ω
i
j
j
and outputs LSTM
i
of
the LSTM due to the high complexity of its internal
mechanism. For this reason, the outputs LSTM
i
de-
scribed in Eq. (15) are defined as dependent variables
of all inputs ω
1
1
, ··· , ω
N
j
n
.
4 RESULTS
This section deals with the implementation of the
NFN-LSTM proposed in this work. Section 4.1 de-
fines the case study and the choice of state-of-the-art
Input: Input variables
x : {(x
1
(k), ··· , x
n
(k))}
K
k=1
, each one
with N
j
MFs, time steps, LSTM layers
begin
Compute triangular MFs based on
Eq. (11);
Normalize MFs and obtain
ω
1
, ··· , ω
N
according to Eq. (13) and Eq. (14);
Compute LSTM
i
(ω
1
, ··· , ω
N
) (LSTM
outputs) based on Eq. (4)-(9);
Obtain the consequent parameters
f
i
[x
j| j=1,···,n
(k)] using Eq. (15);
Estimate the final output using Eq. (12);
end
Output: Estimated output
ˆ
y : {y(k)}
K
k=1
Algorithm 1: NFN-LSTM learning.
methods to compare with NFN-LSTM. Next, the ex-
perimental results of the methods analyzed in Section
4.2 are presented and discussed.
4.1 Case Study
The model proposed in this paper was implemented
using an industrial case study that deals with the es-
timation of residual hydrogen sulfide (H
2
S) in the
tail stream of a Sulfur Recovery Unit (SRU) (Fortuna
et al., 2007). SRU has four sulfur lines that operate in
parallel through two separate combustion chambers,
where one is fed with MEA gas (from the gas wash-
ing plants) rich in H
2
S and the other is fed with SWS
gas (from sour water stripping plants) rich in H
2
S and
ammonia (NH
3
) (Fortuna et al., 2003). Correct es-
timation of residual H
2
S is understood as having the
ability to detect peaks in their values as they indicate
undesirable behavior of the SRU (Souza et al., 2022).
To estimate the residual H
2
S, five variables are
used (Curreri et al., 2021):
1. x
1
: MEA gas fed to the first combustion chamber;
2. x
2
: air fed to the first combustion chamber, that
regulates the combustion of MEA gas to supply
oxygen for the reaction;
3. x
3
: automatically controlled air flow to improve
the stoichiometric ratio [H
2
S] − 2[SO
2
];
4. x
4
: total gas fed to the second combustion cham-
ber, composed of SWS gas and additional MEA
gas (required when SWS gas is too low);
5. x
5
: total air fed to the second combustion cham-
ber, composed of air flow for the combustion of
SWS gas and an additional air flow to keep gas
input constant.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
284

−1
0
1
x
1
−1
0
1
x
2
−1
0
1
x
3
−1
0
1
x
4
−1
0
1
x
5
0 2000 4000 6000 8000 10000
Sample
−1
0
1
Output
Figure 4: Input and output data from SRU.
Figure 4 shows the dataset used to implement
the proposed model, which has x
1
, ··· , x
5
as inputs
and the residual H
2
S as output, each containing K =
10081 samples. This dataset was split into 60%
training, 10% validation, and 30% testing (i.e., 6094,
1008, and 3024 samples, respectively).
The proposed NFN-LSTM is validated through
comparison with the following methods:
• LSTM: standalone long short-term memory net-
work (Hochreiter and Schmidhuber, 1997);
• GAM-ZOTS: generalized additive models using
zero-order T-S fuzzy systems learned by backfit-
ting algorithm (Mendes et al., 2019a);
• iMU-ZOTS: iterative learning for a model com-
posed of the sum of multiple univariate zero-order
T-S fuzzy systems (Mendes et al., 2019b);
• ALMMo-1: autonomous learning of a multimodel
system from streaming data (first-order predictor)
(Angelov et al., 2018);
• iNoMO-TS: iterative learning of multi-input
multi-output T-S fuzzy models using novelty de-
tection (J
´
unior et al., 2021);
• SVR: support vector regression (Vapnik, 1999).
The training and testing datasets are used for
learning the presented models. The validation dataset
is exclusively used in the hybrid model to individually
verify the model’s tendency to behave with unknown
data throughout training in several epochs.
The performance of the proposed model is val-
idated using Normalized Root Mean Square Error
(NRMSE) and Mean Absolute Error (MAE):
NRMSE =
s
∑
K
k=1
[y(k) − ˆy(k)]
2
K
max(y) − min (y)
, (16)
MAE =
∑
K
k=1
|
y(k) − ˆy(k)
|
K
, (17)
where K is the total number of samples, y(k) and
ˆy(k) are the real and estimated outputs of the sys-
tem at k-th sample, respectively, and max (y) and
min(y) are the maximum and minimum values of out-
put y = [y(1), ·· · , y(K)]. The smaller the NRMSE
and MAE values (closer to zero), the better the per-
formance of the method to be validated.
Experiments with NFN-LSTM, LSTM, ALMMo-
1, iNoMO-TS, and SVR were performed using Spy-
der 5 (Python, PyTorch). On the other hand, exper-
iments with GAM-ZOTS and iMU-ZOTS were per-
formed using MATLAB 2022a and C language. Each
one of the experiments was performed 10 times on an
AMD Ryzen 4800H CPU @ 2.90 GHz, with 16GB
DDR4 and 512GB PCIe SSD.
4.2 Implementation
The proposed model has been implemented with 5
membership functions (N
j
= 5) for each j−th vari-
able ( j = 1, ··· , 5), being the total number of fuzzy
rules N = n · N
j
= 5 · 5 = 25 as the dimension of
the input and output of the LSTM. The part with
LSTM has only one hidden layer and one-step fore-
casting. The learning process uses the Adam algo-
rithm (Kingma and Ba, 2014) as optimizer, mean
squared error (MSE) as loss function, 100 epochs, and
learning rate 10
−1
decaying stepwise by 0.95 every
five epochs.
Figure 5 shows the losses for the 100 epochs of the
best trial (out of 10). The comparison results between
the real and estimated outputs in training and testing
stages of the best trial are shown in Figure 6. The
training error values obtained were NRMSE = 0.0348
and MAE = 0.0422, while the testing error values
were NRMSE = 0.0401 and MAE = 0.0417.
In Figure 5, the training and validation cost func-
tions converged satisfactorily, indicating that the pro-
posed model responds well to unknown data. Figure 6
shows that the model reached some peaks as expected
from the SRU dataset, although there are still op-
portunities to improve performance and address more
peaks concerning the system’s dynamic. The fuzzy
rule base obtained from the training of the NFN-
Hybrid LSTM-Fuzzy System to Model a Sulfur Recovery Unit
285

Figure 5: Loss functions for training and validation.
Figure 6: Results of the proposed NFN-LSTM model for
estimating H
2
S residual in the tail stream of SRU.
LSTM model (best trial), in the form of Eq. (10), is
represented below.
Fuzzy rules for x
1
(k):
IF x
1
(k) ∼ A
1
1
THEN y
1
(k) = 5.18 · LSTM
1
IF x
1
(k) ∼ A
2
1
THEN y
2
(k) = 5.03 · LSTM
2
IF x
1
(k) ∼ A
3
1
THEN y
3
(k) = 5.47 · LSTM
3
IF x
1
(k) ∼ A
4
1
THEN y
4
(k) = 4.85 · LSTM
4
IF x
1
(k) ∼ A
5
1
THEN y
5
(k) = 6.66 · LSTM
5
Fuzzy rules for x
2
(k):
IF x
2
(k) ∼ A
1
2
THEN y
6
(k) = 5.27 · LSTM
6
IF x
2
(k) ∼ A
2
2
THEN y
7
(k) = 4.50 · LSTM
7
IF x
2
(k) ∼ A
3
2
THEN y
8
(k) = 5.03 · LSTM
8
IF x
2
(k) ∼ A
4
2
THEN y
9
(k) = 3.43 · LSTM
9
IF x
2
(k) ∼ A
5
2
THEN y
10
(k) = −0.03 · LSTM
10
Fuzzy rules for x
3
(k):
IF x
3
(k) ∼ A
1
3
THEN y
11
(k) = 2.11 · LSTM
11
IF x
3
(k) ∼ A
2
3
THEN y
12
(k) = −0.14 · LSTM
12
IF x
3
(k) ∼ A
3
3
THEN y
13
(k) = 0.21 · LSTM
13
IF x
3
(k) ∼ A
4
3
THEN y
14
(k) = 3.62 · LSTM
14
IF x
3
(k) ∼ A
5
3
THEN y
15
(k) = 2.24 · LSTM
15
Fuzzy rules for x
4
(k):
IF x
4
(k) ∼ A
1
4
THEN y
16
(k) = 3.92 · LSTM
16
IF x
4
(k) ∼ A
2
4
THEN y
17
(k) = 3.94 · LSTM
17
IF x
4
(k) ∼ A
3
4
THEN y
18
(k) = 5.58 · LSTM
18
IF x
4
(k) ∼ A
4
4
THEN y
19
(k) = −0.55 · LSTM
19
IF x
4
(k) ∼ A
5
4
THEN y
20
(k) = 5.00 · LSTM
20
Fuzzy rules for x
5
(k):
IF x
5
(k) ∼ A
1
5
THEN y
21
(k) = 4.00 · LSTM
21
IF x
5
(k) ∼ A
2
5
THEN y
22
(k) = 2.56 · LSTM
22
IF x
5
(k) ∼ A
3
5
THEN y
23
(k) = 0.05 · LSTM
23
IF x
5
(k) ∼ A
4
5
THEN y
24
(k) = −2.52 · LSTM
24
IF x
5
(k) ∼ A
5
5
THEN y
25
(k) = −0.17 · LSTM
25
4.3 Discussion
Different methods may present distinct behaviors to
attempt a fair comparison of performance. Thus, the
main parameters of the methods compared in this sec-
tion were adjusted as follows:
• LSTM: one hidden layer, one-step forecasting,
25 for input and output dimension, 100 epochs,
learning rate 10
−1
decaying stepwise by 0.95 ev-
ery five epochs, Adam optimizer.
• GAM-ZOTS: it
max
= 100 (max. number of itera-
tions), ξ = 10
−3
(termination condition), N
j
= 5
(fixed number of rules), backfitting algorithm.
• iMU-ZOTS: it
max
= 100 (max. number of itera-
tions), ξ = 10
−3
(termination condition), N
j
= 5
(fixed max. number of rules), M
j
th
= 0.8 (thresh-
old for novelty detection), backfitting algorithm.
• ALMMo-1: Ω = 10 (for initializing covariance
matrices), λ = 0.8 (threshold for adding new
rules), η = 0.1 (forgetting factor).
• iNoMO-TS: it
max
= 100 (max. number of iter-
ations), N
th
D
= 0.3 (threshold for novelty detec-
tion), S
th
D
= 0.6 (threshold for similarity detec-
tion), σ
ini
= 10 (elements of the initial covariance
matrix).
• SVR: C = 1 (regularization parameter), epsilon =
0.1 (threshold for non-penalty associated with er-
rors), radial basis function kernel.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
286
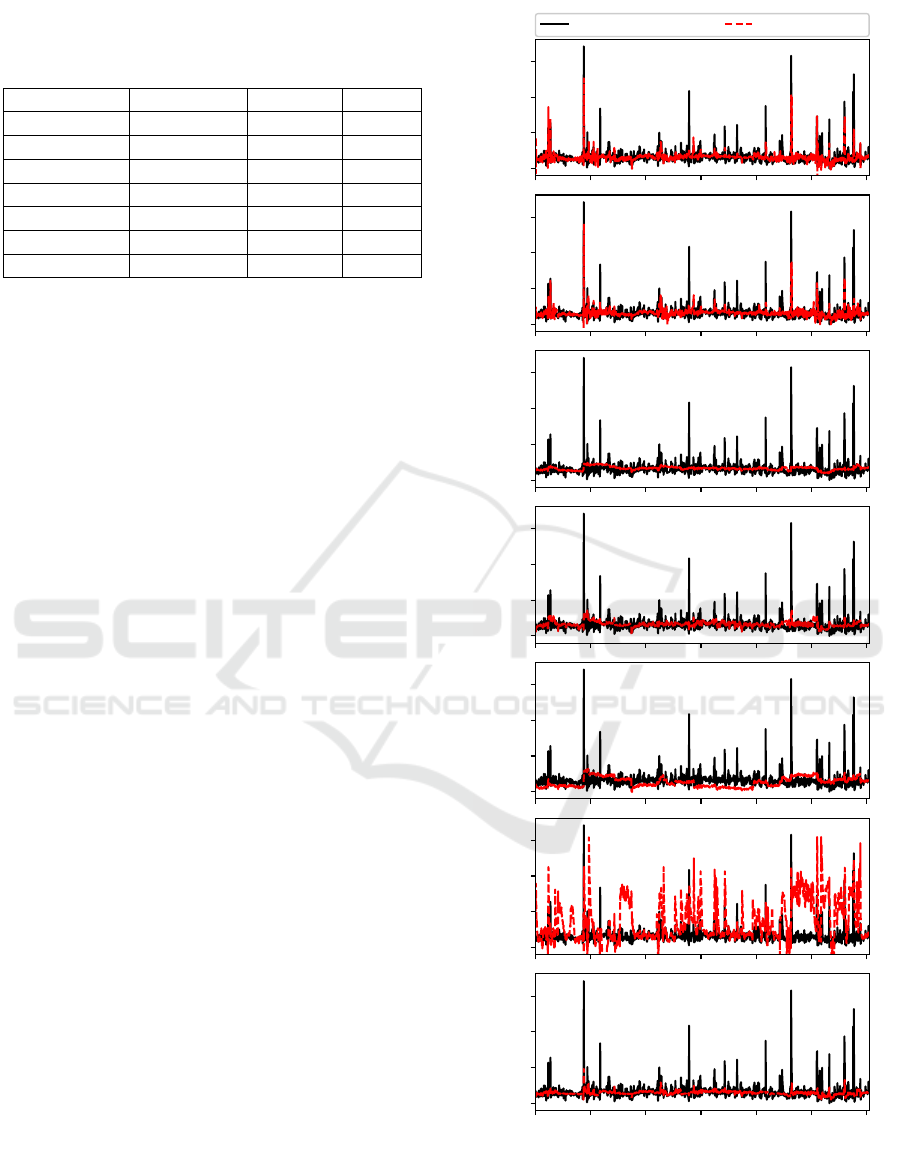
Table 1: Testing results of the proposed NFN-LSTM,
LSTM, GAM-ZOTS, iMU-ZOTS, ALMMo-1, iNoMO-TS,
and SVR.
Method Elapsed (s) NRMSE MAE
NFN-LSTM 2.7672 0.0414 0.0425
LSTM 2.4712 0.0436 0.0452
GAM-ZOTS 4.7521 0.0542 0.0509
iMU-ZOTS 1.8751 0.0529 0.0518
ALMMo-1 13.6527 0.0649 0.0794
iNoMO-TS 353.5502 0.2003 0.2332
SVR 1.3709 0.0510 0.0428
Table 1 presents the average elapsed training time
and the average testing error values of 10 trials of the
proposed model, LSTM, GAM-ZOTS, iMU-ZOTS,
ALMMo-1, iNoMO-TS, and SVR, whose best aver-
age performance is highlighted in bold. Figure 7 com-
pares the outputs of the best-learned models across 10
trials in the testing phase.
It can be noticed that the proposed model and the
LSTM had similar performance in estimation qual-
ity. This fact does not occur in the other methods,
especially GAM-ZOTS and iMU-ZOTS, which have
a neo-fuzzy neuron model with a similar structure
that provided the basis for the proposed method. Fur-
thermore, ALMMo-1 and iNoMO-TS did not obtain
efficient estimation despite their adaptive learning,
whose final number of membership functions for each
input variable (as well as fuzzy rules) was equal to
12 and 15, respectively. Still, Figure 7 shows the
instability expressed by iNoMO-TS and the low es-
timation quality by SVR, although it presents error
values close to the NFN-LSTM and LSTM. In addi-
tion to achieving good accuracy and estimation qual-
ity, the proposed model (NFN-LSTM) manages to ex-
press good interpretability in a global way that can be
analyzed on the learned fuzzy rules.
5 CONCLUSIONS
The present study proposed a hybrid method involv-
ing a neo-fuzzy neuron system with long short-term
memory, the NFN-LSTM model, with a positive bal-
ance between interpretability and accuracy. Inter-
pretability can be analyzed by the influence of in-
puts on the output with the learned fuzzy rules, and
accuracy is verified by the quality of the output es-
timation and associated errors. The case study in
an industrial system showed the viability and power
of NFN-LSTM over the LSTM, GAM-ZOTS, iMU-
ZOTS, ALMMo-1, iNoMO-TS, and SVR methods,
due to the results and the additional task of detect-
ing important peak values for the application. Fu-
− 1.0
− 0.5
0.0
0.5
O utput (N FN -LSTM )
− 1.0
− 0.5
0.0
0.5
O utput (LSTM )
− 1.0
− 0.5
0.0
0.5
O utput (G AM -ZO TS)
− 1.0
− 0.5
0.0
0.5
O utput (iM U-ZO TS)
− 1.0
− 0.5
0.0
0.5
O utput (ALM M o-1)
− 1.0
− 0.5
0.0
0.5
O utput (iN oM O -TS)
0 500 1000 1500 2000 2500 3000
Sam ple
− 1.0
− 0.5
0.0
0.5
O utput (SVR)
Real Output Estimated Output
Figure 7: Comparison of testing outputs of the NFN-LSTM,
LSTM, GAM-ZOTS, iMU-ZOTS, ALMMo-1, iNoMO-TS,
and SVR.
Hybrid LSTM-Fuzzy System to Model a Sulfur Recovery Unit
287

ture works will explore the use of other methods in
a hybrid way to the neo-fuzzy neuron to improve the
interpretability-accuracy trade-off.
ACKNOWLEDGEMENTS
Jorge S. S. J
´
unior is supported by Fundac¸
˜
ao para
a Ci
ˆ
encia e a Tecnologia (FCT) under the grant
ref. 2021.04917.BD. This research was supported
by the ERDF and national funds through the
project InGestAlgae (CENTRO-01-0247-FEDER-
046983), and by the FCT project UIDB/00048/2020.
REFERENCES
Angelov, P. P., Gu, X., and Pr
´
ıncipe, J. C. (2018). Au-
tonomous Learning Multimodel Systems From Data
Streams. IEEE Transactions on Fuzzy Systems,
26(4):2213–2224.
Angelov, P. P., Soares, E. A., Jiang, R., Arnold, N. I., and
Atkinson, P. M. (2021). Explainable artificial intelli-
gence: an analytical review. WIREs Data Mining and
Knowledge Discovery.
Curreri, F., Patan
`
e, L., and Xibilia, M. (2021). Soft Sen-
sor Transferability between Lines of a Sulfur Recov-
ery Unit. IFAC-PapersOnLine, 54(7):535–540.
Fortuna, L., Graziani, S., Rizzo, A., and Xibilia, M. G.
(2007). Soft Sensors for Monitoring and Control of
Industrial Processes. Springer Science & Business
Media.
Fortuna, L., Rizzo, A., Sinatra, M., and Xibilia, M. (2003).
Soft analyzers for a sulfur recovery unit. Control En-
gineering Practice, 11(12):1491–1500.
Gandin, I., Scagnetto, A., Romani, S., and Barbati, G.
(2021). Interpretability of time-series deep learning
models: A study in cardiovascular patients admitted
to Intensive care unit. Journal of Biomedical Infor-
matics, 121:103876.
Goodfellow, I., Bengio, Y., Courville, A., and Bengio, Y.
(2016). Deep learning. MIT press Cambridge.
Guo, R., Liu, H., Wang, W., Xie, G., and Zhang, Y.
(2021). A Hybrid-driven Soft Sensor with Com-
plex Process Data Based on DAE and Mechanism-
introduced GRU. In 2021 IEEE 10th Data Driven
Control and Learning Systems Conference (DDCLS),
pages 553–558.
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-
Term Memory. Neural Computation, 9(8):1735–1780.
Jiang, Y., Yin, S., Dong, J., and Kaynak, O. (2021). A
Review on Soft Sensors for Monitoring, Control, and
Optimization of Industrial Processes. IEEE Sensors
Journal, 21(11):12868–12881.
J
´
unior, J. S. S., Mendes, J., Ara
´
ujo, R., Paulo, J. R., and
Premebida, C. (2021). Novelty Detection for Iterative
Learning of MIMO Fuzzy Systems. In 2021 IEEE
19th International Conference on Industrial Informat-
ics (INDIN), pages 1–7.
J
´
unior, J. S. S., Mendes, J., Souza, F., and Premebida, C.
(2023). Survey on Deep Fuzzy Systems in regression
applications: a view on interpretability. International
Journal of Fuzzy Systems, pages 1–22.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lees, T., Reece, S., Kratzert, F., Klotz, D., Gauch, M.,
Bruijn, J. D., Sahu, R. K., Greve, P., Slater, L., and
Dadson, S. J. (2022). Hydrological concept formation
inside long short-term memory (LSTM) networks.
Hydrology and Earth System Sciences, 26(12):3079–
3101.
Liu, X., Shi, Q., Liu, Z., and Yuan, J. (2021). Using LSTM
Neural Network Based on Improved PSO and Atten-
tion Mechanism for Predicting the Effluent COD in a
Wastewater Treatment Plant. IEEE Access, 9:146082–
146096.
Mendes, J., Souza, F., Ara
´
ujo, R., and Rastegar, S.
(2019a). Neo-Fuzzy Neuron Learning Using Backfit-
ting Algorithm. Neural Computing and Applications,
31(8):3609–3618.
Mendes, J., Souza, F. A. A., Maia, R., and Ara
´
ujo, R.
(2019b). Iterative Learning of Multiple Univariate
Zero-Order T-S Fuzzy Systems. In Proc. of the
The IEEE 45th Annual Conference of the Industrial
Electronics Society (IECON 2019), pages 3657–3662.
IEEE.
Moral, J. M. A., Castiello, C., Magdalena, L., and Mencar,
C. (2021). Explainable Fuzzy Systems. Springer In-
ternational Publishing.
Silva, A. M., Caminhas, W., Lemos, A., and Gomide, F.
(2014). A fast learning algorithm for evolving neo-
fuzzy neuron. Applied Soft Computing, 14:194–209.
Souza, F., Offermans, T., Barendse, R., Postma, G., and
Jansen, J. (2022). Contextual Mixture of Experts: In-
tegrating Knowledge into Predictive Modeling. IEEE
Transactions on Industrial Informatics, pages 1–12.
Vapnik, V. (1999). The nature of statistical learning theory.
Springer science & business media.
Yamakawa, T. (1992). A Neo Fuzzy Neuron and Its Appli-
cations to System Identification and Prediction of the
System Behavior. Proc. of the 2nd Int. Conf. on Fuzzy
Logic & Neural Networks, pages 477–483.
Yuan, X., Li, L., and Wang, Y. (2020). Nonlinear Dynamic
Soft Sensor Modeling With Supervised Long Short-
Term Memory Network. IEEE Transactions on In-
dustrial Informatics, 16(5):3168–3176.
Zarzycki, K. and Ławry
´
nczuk, M. (2021). LSTM and GRU
Neural Networks as Models of Dynamical Processes
Used in Predictive Control: A Comparison of Mod-
els Developed for Two Chemical Reactors. Sensors,
21(16).
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
288
