Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing
Operation in Spent Nuclear Fuel Treatment Process
Duc-Tri Vo
1,2 a
, Ionela Prodan
1 b
, Laurent Lef
`
evre
1 c
, Vincent Vanel
2 d
,
Sylvain Costenoble
2 e
and Binh Dinh
2 f
1
Univ. Grenoble Alpes, Grenoble INP, LCIS, F-26000, Valence, France
2
CEA, DES, ISEC, DMRC, Univ Montpellier, Marcoule, France
Keywords:
Nonlinear MPC, PUREX, Liquid-Liquid Extraction.
Abstract:
This paper addresses the particularities of the uranium extraction-scrubbing operation in a spent nuclear fuel
treatment process (PUREX-Plutonium Uranium Refining by Extraction) through the use of set-point tracking
MPC (Model Predictive Control). The presented controller uses the feed solution flow rate as the manipulated
variable to control the saturation of the solvent at the extraction step. In addition, it guarantees not to loose
uranium in the raffinates, and ensures equipment limitations during operation time. Simulation results show
that the tracking NMPC effectively ensures accurate set point tracking and constraints guarantee. As a result,
the system can be driven to its optimal working condition, avoid and recover from constraint violations. The
control performance was compared with PID and openloop controllers.
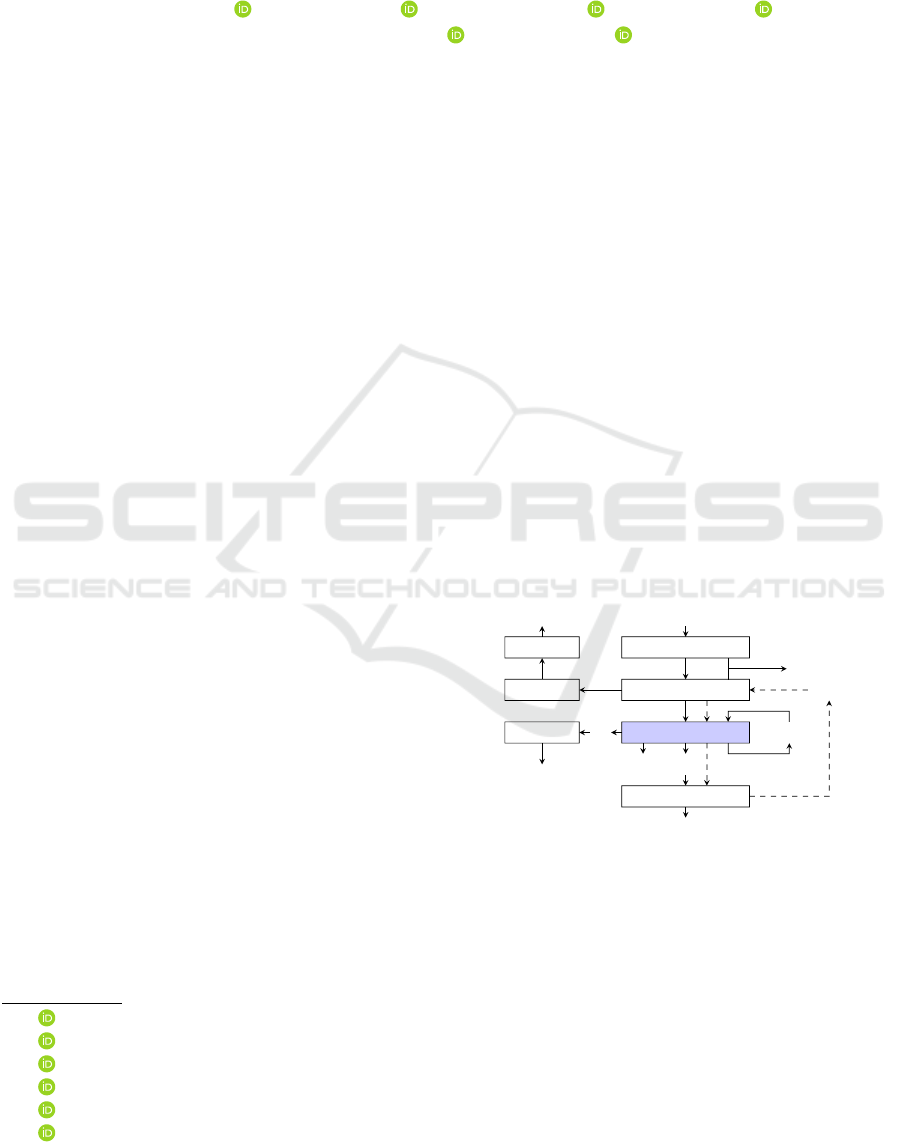
1 INTRODUCTION
1.1 PUREX Introduction and
Motivation
PUREX (Plutonium Uranium Refining by Extraction)
is a hydro-metallurgical process used to recover and
purify uranium and plutonium from spent nuclear fu-
els (Vaudano, 2008). It further allows the reuse of ura-
nium and plutonium while ensuring that the nuclear
waste is compatible with disposal requirements. The
PUREX process is currently applied at an industrial
scale at La Hague, a nuclear fuel reprocessing plant
in northern France. As shown in Fig. 1, The PUREX
process starts with removing the fuel cladding to per-
mit nuclear material stored inside to be dissolved as
wholly as possible in nitric acid. Next, fuel disso-
lution allows uranium and plutonium to be extracted
and purified by liquid-liquid extraction techniques,
which use tributyl phosphate (TBP) as an extractant
a
https://orcid.org/0009-0006-4366-5258
b
https://orcid.org/0000-0002-3522-5192
c
https://orcid.org/0000-0002-5496-5882
d
https://orcid.org/0000-0001-8849-2174
e
https://orcid.org/0000-0003-0916-1006
f
https://orcid.org/0000-0003-3076-619X
in hydrogenated tetra propylene (HTP). Finally, ura-
nium and plutonium are collected under the form of
UO
2
(NO
3
)
2
and PuO
2
at the outlets of the process
after conversion.
Fuel
Mechanical Processing
Dissolution
Extraction cycles
Pu
Conversion
PuO
2
UO
2
(NO
3
)
2
Gaseous
Effluents
CSD-C
Compacting
Structures
FPs
Vitrification
CSD-V
HNO
3
TBP/HTP
Figure 1: The PUREX process (Vaudano, 2008).
The primary control objective of the PUREX pro-
cess is to quickly attain a high recovery rate and de-
contamination factor, disregarding the variations of
system’s parameters. A dedicated control strategy
of the basic units in extraction cycles, which are
extraction-scrubbing, back extraction (stripping), and
solvent generation (Dinh et al., 2008), can be imple-
mented in this aim. This research focuses on the ura-
nium extraction-scrubbing process using mixer set-
tlers, as depicted in Fig. 2. Our model is described
in details in Section 2. To the best of our knowledge,
Vo, D., Prodan, I., Lefèvre, L., Vanel, V., Costenoble, S. and Dinh, B.
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process.
DOI: 10.5220/0012180700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 37-43
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
37

there are few similar works on control of this pro-
cess in the literature. Consequently, we introduce in
the next subsection available studies for similar pro-
cesses, which are also liquid-liquid extraction using
mixer settlers, as a good source of reference.
EXTRACTION FP SCRUBBING
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Fresh Solvant Loaded Solvent
Fission Products Acid
Feed Solution
Figure 2: The extraction/FP scrubbing step.
1.2 Literature Review
Among the first studies, the authors in (Seemann,
1973), modeled and developed a control scheme to
maintain the efficiency of a rare earth elements extrac-
tion process under the variation of a measured system
parameter. Based on the linearly approximated pro-
cess model, this controller consists of three compo-
nents: a pre-calculated control input at a steady state,
a dynamic compensation term, and a proportional-
integral (PI) correction term to eliminate the steady-
state offset. Moreover, regarding the rare earth extrac-
tion operation, (Yang et al., 2010), (Yang et al., 2016)
used multiple linear models to identify the process
and designed different model predictive controllers
for each model. Then, the model-controller selection
is made by considering the accumulative error during
operation.
Another liquid-liquid extraction process using
mixers-settlers is copper solvent extraction. In (Ko-
mulainen et al., 2009) and (Shahcheraghi et al., 2021),
a two-level optimization-stabilization control strategy
was developed. At the optimization level, the op-
timal set-point that maximizes the process produc-
tion is computed and fed to the stabilization level to
stabilize the system at that set point. Multiple con-
trol schemes for the tracking layer, such as PI, PI
combined with feed-forward control, Model Predic-
tive Control, and Model Predictive Control combined
with feed-forward control, were studied. The two-
level control strategy reported in these works is pop-
ular in process control, as also discussed in (Seborg
et al., 2016).
In the literature, there is no exactly similar pro-
cess control problem as ours. However, we have seen
that MPC was used in many applications. It is also
a well-known control method in academia and indus-
try (Mayne et al., 2000). In MPC, control inputs are
obtained by solving an online constrained (nonlinear)
optimization problem, with the current state as the ini-
tial condition. Consequently, MPC can efficiently op-
timize performance, handle constraints and nonlinear-
ities, and ensure control stability. A comprehensive
overview of MPC theory, computation, and imple-
mentation can be found in (James and David, 2022).
As previously mentioned, our particular process
requires guarantees of hard constraints on process
safety, performance, and equipment limits. Addition-
ally, in the future, we want to exploit the advantage of
the qualified simulation code PAREX (Bisson et al.,
2016) to compute the optimal control inputs online.
Therefore, MPC is a promising approach for our con-
trol problem.
1.3 Contributions and Paper
Organization
This paper introduces an optimal control technique
for the uranium extraction-scrubbing process in the
PUREX process, utilizing Nonlinear Model Predic-
tive Control (NMPC) approach. The controller was
designed to manipulate the feed solution flow rate
while guaranteeing constraints which are not loosing
uranium in the raffinates, and equipment limitations
during operation time. Simulation results show that
MPC effectively ensures accurate set point tracking
and constraints guarantee. As a result, the system can
be driven to its optimal working condition faster than
the open loop case.
The paper is organized as follows. Section 2 intro-
duces the process model, dynamic characteristics, set
up of the control problem and the state-space repre-
sentation. Then, the NMPC is formulated in Section
3. In Section 4, simulation results over different cases
studies are presented. Finally, conclusions are stated
in Section 5.
Notations: For z ∈ R
n
, we denote
∥
z
∥
2
Q
= z
T
Qz.
u(k−1|k) := u(k−1). I denotes identity matrix of ap-
proriate dimension. Inequalities between vectors are
evaluated element-wise.
Remark: For the sake of data confidentiality, some
numerical parameters of the process are normalized.
The nominal parameter values are denoted with a 0
superscript.
2 URANIUM
EXTRACTION-SCRUBBING
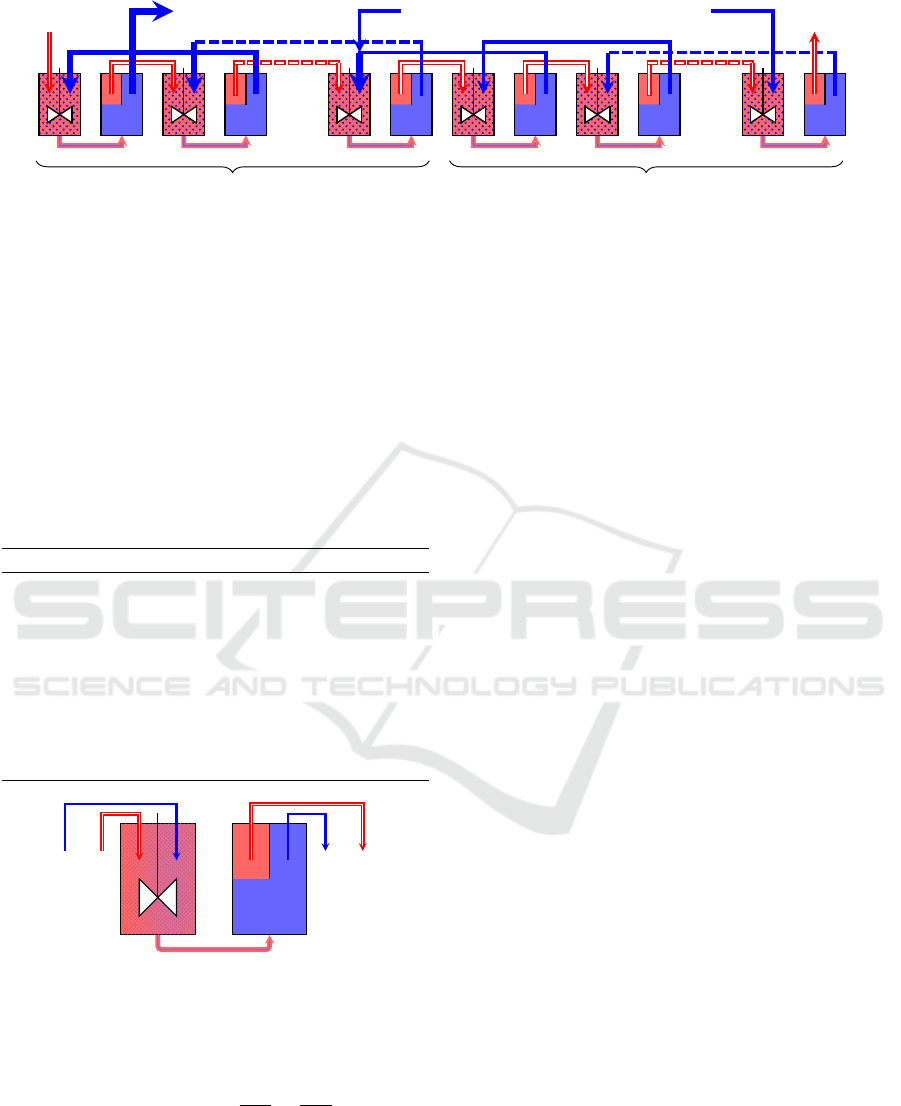
2.1 Mathematical Model
The principle of the extractor is depicted in Fig. 3. It
consists of 16 stages of mixer-settlers in series, which
is typical of the uranium extraction-scrubbing pro-
cess tests achieved at CEA. Our mathematical model
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
38
Fresh Solvent
O
E
, [TBP]
total
E
Fission Products
[U]
aqD
1
, [H]
aq,D
1
Feed Solution
A
F
, [U]
aqM
F
, [H]
aqM
F
Acid
A
E
, [H]
aqM
E
Loaded Solvent
[U]
ogD
16
, [H]
ogD
16
Stage 1 Stage 2 Stage 8 Stage 9 Stage 10 Stage 16
. . . . . .
EXTRACTION
FP SCRUBBING
Figure 3: Uranium extraction-scrubbing operations using mixers-settlers.
is based on mass balance equations and the assump-
tions: (i) constant density, (ii) immiscibility of the
aqueous and organic phases, (iii) perfect mixing in
the mixer, (iv) transfer kinetics is disregarded. Sys-
tem parameters notation are described in Fig. 3 and
Tab. 1. Equation (1) describes the primary extraction
mechanism.
UO
2+
2
+ 2NO
−
3
+ 2TBP
K
U
⇌ UO
2
(NO
3
)
2
· TBP (1a)
H
+
+ NO
−
3
+ TBP
K
H
⇌ HNO
3
· TBP (1b)
Table 1: System parameters notation and descriptions.
Notation Description
A, O Aqueous and organic flow rates.
V , W Aqueous and organic volumes.
K
U
, K
H
Equilibrium constants for U and H.
k
U
, k
H
Mass transfer coefficients for U , H.
aq
,
og
Related to aqueous and organic phase.
M
,
D
Related to mixer and settler.
[·] Concentration.
n
Related to stage n of the process.
i
Related to inputs to stage n.
O
n,i
[U]
ogD
n,i
[H]
ogD
n,i
A
n,i
[U]
aq
n,i
[H]
aq
n,i
A
M
n
, [U]
aqM
n
, [H]
aqM
n
O
M
n
, [U]
ogM
n
, [H]
ogM
n
O
D
n
[U]
ogD
n
[H]
ogD
n
A
D
n
[U]
aqD
n
[H]
aqD
n
Figure 4: Mixer-settler model.
Assuming that mixer volumes satisfy:
˙
V
M
n
=
˙
W
M
n
= 0 ⇒
A
n,i
O
n,i
=
V
M
n
W
M
n
·
Uranium mass balances in mixers and settlers are
given in (3). We assume that the mass transfer term
of uranium from the organic to aqueous phase is given
by Φ
U
n
, where the mass transfer coefficient k
U
is very
large. [U]
ogM
n,∗
is computed from the chemical equilib-
rium condition.
V
M
n
[
˙
U]
aqM
n
= A
n,i
[U]
aq
n,i
− A
M
n
[U]
aqM
n
+ Φ
U
n
(3a)
W
M
n
[
˙
U]
ogM
n
= O
n,i
[U]
og
n,i
− O
M
n
[U]
ogM
n
− Φ
U
n
(3b)
V
D
n
[
˙
U]
aqD
n
= A
M
n
[U]
aqM
n
− A
D
n
[U]
aqD
n
(3c)
W
D
n
[
˙
U]
ogD
n
= O
M
n
[U]
ogM
n
− O
D
n
[U]
ogD
n
(3d)
Φ
U
n
= k
U
[U]
ogM
n,∗
− [U]
ogM
n
(3e)
[U]
ogM
n∗
= K
U
[U]
aqM
n
[NO
3
]
aqM
n
2
[T BP]
ogM
freen
2
(3f)
Mass balances equations for H
+
can be obtained
by replacing U by H in (3), note that [H]
ogM
n,∗
is com-
puted as follow:
[H]
ogM
n∗
= K
H
[H]
aqM
n
[NO
3
]
aqM
n
[T BP]
ogM
freen
(4)
Additionally, we have equations for total aqueous ni-
trate ion concentration and total organic TBP concen-
tration in mixer (5).
[NO
3
]
aqM
n
= 2[U ]
aqM
n
+ [H]
aqM
n
(5a)
[T BP]
ogM
totn
= [T BP]
ogM
freen
+ 2[U]
ogM
n
+ [H]
ogM
n
. (5b)
We also assume that
A
n
:= A
M
n
= A
D
n
, O
n
:= O
M
n
= O
D
n
, (6a)
V
M
1
+W
M
1
= V
M
2
+W
M
2
= ··· = V
M
16
+W
M
16
(6b)
[T BP]
ogM
totE
= [T BP]
ogM
tot1
= ··· = [T BP]
ogM
tot16
. (6c)
Remarks: When k
U
,k
H
is large, the system dynam-
ics becomes stiff. Additionally, the system dynamics
is high dimensional with 128 states. Hence, the MPC
optimization problem for this problem is an large-
scale Nonlinear Programming Problem (NLP) that re-
quires high computational efforts. As a consequence,
we want to study the MPC behavior with a similar
and simpler dynamics. Therefore, in this first study,
to facilitate numerical computations, we assume that
[
˙
U]
ogM
n
= 0. Note that this assumptions should be re-
moved in future studies.
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
39
2.2 Control Objectives
Since this is the first study on control of this process
using MPC, for the work in this manuscript, we chose
the control objective as follow. We aim to maximize
the amount of extracted uranium (7a), while keeping
uranium concentration in fission products below a tol-
erance (7b) and constraints on control inputs. The fi-
nal time t
f
in (7a) can be chosen as the settling time
of the open loop system. In future works, we will aim
to control the solvent saturation level.
R =
Z
t
f
0
O
D
16
[U]
ogD
16
dt (7a)
[U]
aqD
1
≤ [U ]
aqD
1,tol
(7b)
A
F,min
≤ A
F
≤ A
F,max
(7c)
∆A
F,min
≤ ∆A
F
≤ ∆A
F,max
(7d)
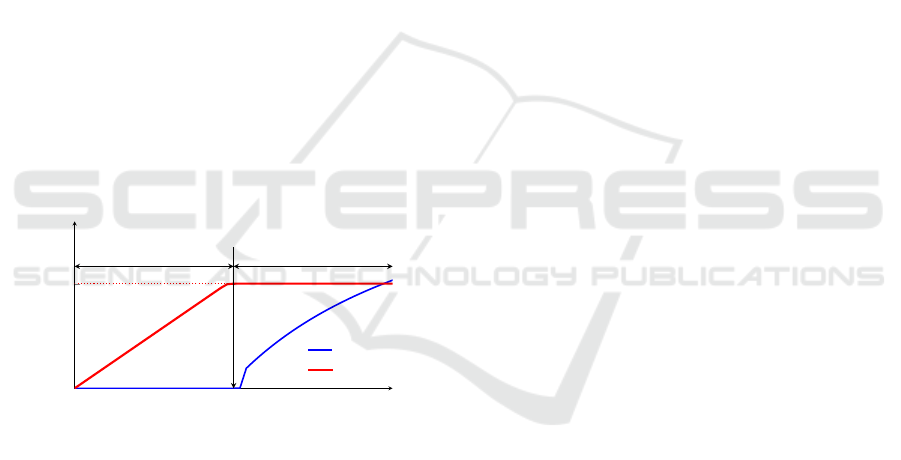
2.3 Solvent Saturation and Set Point
Determination
Analyzing the process dynamics shows a critical op-
erating condition in which the system becomes satu-
rated. As an illustration, Fig. 5 shows the steady state
relationship between the feed solution flow rate A
F
and uranium concentrations at the system outlets.
A
∗
F
[U]
ogD*
16
Solvent Saturation Condition
Under-saturation
Over-saturation
A
F
[U]
[U]
aqD
1
[U]
orgD
16
Figure 5: Steady state relationship of feed solution flow
rates and uranium concentrations.
It can be seen from Fig. 5 that if the solvent is
under-saturated, by increasing A
F
, we can increase
the extracted uranium until the solvent saturation con-
dition is reached (A
F
= A
∗
F
). However, once the sol-
vent is over-saturated, increasing A
F
no longer in-
creases the amount of uranium extracted but drasti-
cally increases [U]
aqD
1
. This behavior is undesirable
because a large amount of uranium will be entrained
in raffinates with the non-recyclable species, such as
fission products. Since A
∗
F
has a very small margin to-
wards the over-saturation zone, if we succeed in con-
trolling the system to work at A
∗
F
, we can manage in
other under-saturated set points. Note that in practice,
the set point should be chosen appropriately depend-
ing on the equipment’s limits.
2.4 Manipulated, Disturbance and
Controlled Variables
Since this system dynamic is nonlinear and high di-
mensional with 96 stages, it is preferable to begin
with a control scheme with one control input and one
disturbance variable, A
F
and O
E
respectively. This
choice is based on the fact that the flow rate is much
easier to manipulate than the concentration. It can be
done by using commercial pump controllers and flow
meters. In addition, by observing system dynamics,
A
F
and O
E
are much more sensitive to uranium con-
centrations compared to A
E
. It can be verified that
this choice makes the system stabilizable and output
controllable.
Since MPC has the advantage in multi-variable
control, a state feedback control approach is chosen.
On the contrary, for single input single output con-
troller such as PID, [U]
ogD
16
is chosen as the controlled
variable. It should be noted that although sensors have
limitations to measure uranium concentrations in or-
ganic phase, we can still obtain this value from the
mathematical model. States estimation, noises and
model mismatches are not covered in this manuscript,
all the states are assumed to be well feed-backed.
2.5 State Space Representations
The process dynamics described in 2 can be written
as a system nonlinear ordinary differential equations
(ODEs). The continuous state space representation of
the system can be represented as follow:
˙
x = f
c
(x, u, p), (8)
in which:
• x =
h
x
T
(1)
x
T
(2)
x
T
(3)
x
T
(4)
x
T
(5)
x
T
(6)
i
T
are
system states, x ∈ R
96×1
, in which
x
T
(1)
=
h
[U ]
aqM
1
[U ]
aqM
2
.. . [U ]
aqM
16
i
,
x
T
(2)
=
h
[U ]
aqD
1
[U ]
aqD
2
.. . [U ]
aqD
16
i
,
x
T
(3)
=
h
[U ]
ogD
1
[U ]
ogD
2
.. . [U ]
ogD
16
i
,
x
T
(4)
=
h
[H]
aqM
1
[H]
aqM
2
.. . [H]
aqM
16
i
,
x
T
(5)
=
h
[H]
aqD
1
[H]
aqD
2
.. . [H]
aqD
16
i
,
x
T
(6)
=
h
[H]
ogD
1
[H]
ogD
2
.. . [H]
ogD
16
i
;
• u = A
F
is the manipulated variable;
• p = O
E
is the measured varying parameter;
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
40

• f
c
is the vector of mass balance equations of cor-
responding states in x.
Denoting
¯
x
¯
k
:= x(
¯
kh), the discrete time model
can be obtained by using the Euler method with sam-
pling time h ∈ R
+
and
¯
k ∈ Z
+
as follows:
¯
x(
¯
k + 1) =
¯
x
¯
k
+ hf
c
(
¯
x
¯
k
, u
¯
k
, p
¯
k
).
From our experience, to ensure the discretization con-
vergence, h should be sifficiently small, about 10
−3
hours. However, since the process dynamic is slow,
the control sampling time T
s
is much larger, about 0.1
or 0.5 hours for example. Assume that u(t), p(t) are
constant ∀t ∈ [kT
s
,(k + 1)T
s
), let N
s
:= T
s
/h, it is more
convenient to denote x(k) := x (kT
s
) and
x(k + 1) = f(x(k),u(k), p(k)). (9)
3 NMPC FORMULATION
In this section, we formulate the set-point tracking
MPC. In general, it has two steps:
(i) defining the appropriate set point depending on
the value of p in (8) and the flow sheet;
(ii) apply the MPC or PID controller to stabilize the
system at the defined set point.
Consider the discrete model (9), given the ini-
tial state x(k), denote x( j|k) the predicted state at
time step j driven by the predicted control inputs
{u(i|k)}
j
i=k
, ∀ j ∈ Z
+
, j > k. In addition, denote
(x
set
,u
set
) the desired set point and
˜
x := x − x
set
, ˜u :=
u − u
set
, the quadratic cost function can be defined as
follows, with N
p
denotes the prediction horizon:
ℓ
x(k), u(k − 1), {u(i|k)}
N
p
−1
i=k
=
N
p
−1
∑
i=k
∥
˜
x(i|k)
∥
2
Q
+
∥
˜u(i|k)
∥
2
R
+
N
p
−1
∑
i=k
∥
u(i|k) − u(i − 1|k)
∥
2
S
+
∥
˜
x(N + 1|k)
∥
2
P
in which Q, R,P, S denote symmetric positive defi-
nite weighting matrices. The constraints (10) can be
written as follow, for all i, k ∈ Z
+
, i ∈ [k, k + N
p
]:
x(i|k) ≥ 0 (10a)
x
17
(i|k) ≤ [U]
aqD
1,tol
(10b)
A
F,min
≤ u(i|k) ≤ A
F,max
(10c)
∆A
F,min
≤ u(i|k) − u(i|k − 1) ≤ ∆A
F,max
. (10d)
In summary, at each control sampling time k,
given the state vector x(k), MPC solves the follow-
ing optimization problem to obtain optimal open loop
control inputs {u
∗
(i|k)}
N
p
−1
i=k
. Then, the first control
input u
∗
(k|k) is applied to the system until the next
time step k + 1, hence closing the loop.
min
{u(i|k)}
N
p
i=k
ℓ
x(k), u(k − 1), {u(i|k)}
N
p
−1
i=k
subject to (10), ∀i, k ∈ Z
+
, i ∈ [k, k + N
p
− 1], and:
x(i + 1|k) = f(x(i|k),u(i|k), p(i|k)),
x(k|k) = x(k).
4 CASE STUDIES
This section presents the simulation studies of the
nonlinear tracking MPC approach for the system
shown in Fig. 3. Set point tracking with varying
parameters and constraint-handling applications are
studied. NMPC performance is compared to open
loop and PID controllers. The NMPC implementa-
tion was based on CasADi toolbox (Andersson et al.,
2019) and the nonlinear programming (NLP) solver
IPOPT (W
¨
achter and Biegler, 2005). In addition,
SUNDIALS, cf. (Hindmarsh et al., 2005) and (Gard-
ner et al., 2022), was also used as differential and al-
gebraic equation solvers.
The MPC weighting matrices were chosen heuris-
tically, with Q = P = I and R = S = 1/u
set
. The
control sampling time T
s
is 0.5 hours and the predic-
tion horizon N
p
is 10 steps. In addition, set points are
chosen as saturation points, as shown in Fig. 6. Note
that critical set points must be redefined whenever O
E
changes to ensure the feasibility and optimality of the
control objectives. Finally, [U ]
aqD
1
is plotted in loga-
rithmic scale.
The PID controller with y = [U ]
ogD
16
is given as:
u(k) = u
set
+ K
P
e(k) + K
I
e
I
(k) + K
D
e
D
(k) (11a)
e(k) = y
set
− y(k) (11b)
e
I
(k) = 0.5T [e(k) + e(k − 1)] + e
I
(k − 1) (11c)
e
D
(k) = [e(k) − e(k − 1)] /T (11d)
The gains K
P
, K
I
, K
D
are tuned by solving the fol-
lowing optimization offline:
min
K
P
,K
I
,K
D
N
PID
−1
∑
k=0
h
e
2
(k) + r ˜u
2
(k) + s [u(k + 1) − u(k)]
2
i
subject to (9)-(11) with r, p, s are weighting param-
eters. N
PID
was chosen to be 30 steps, which is the
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
41

settling time of the open loop system. Finally, satu-
ration is also added to satisfy bounded constraints on
control inputs, ∀k ∈ Z
+
:
u(k) =
u
min
, u ≤ u
min
u
max
, u ≥ u
max
u(k), otherwise.
u(k) =
u(k − 1) + ∆u
min
, u(k) − u(k − 1) ≤ ∆u
min
u(k − 1) + ∆u
max
, u(k) − u(k − 1) ≥ ∆u
max
u(k), otherwise.
0
A
∗
F a
A
∗
F b
A
∗
F c
0
[U]
ogD*
16a
[U]
ogD*
16b
[U]
ogD*
16c
A
F
, L/h
[U], M
[U]
aqD
1
[U]
ogD
16
Case (a)
Case (b)
Case (c)
Figure 6: Steady state relationship of A
F
and [U ]
ogD
16
in 3
cases (a): O
E
= 0.5O
0
E
, (b) O
E
= O
0
E
, and (c) O
E
= 1.5O
0
E
.
4.1 Nominal Set Point Tracking with
Varying Parameters
In this subsection, it is assumed that t = 0, the sys-
tem is at steady state with nominal parameters except
for [U]
aq
F
= 0. In other words, uranium is only sent
into the system once t > 0. The simulation results for
the nominal case is presented in Fig. 7. It is shown
that both NMPC, PID, and open loop controllers can
stabilize the output at the set point while adhering to
the constraint on [U]
aqD
1
. A quantitatively comparison
can be done by computing the amount of extracted
uranium R given in (7a). Since the 2% settling time
of the open loop case is 30 hours, approximate (7a) by
(12), and choose t
f
= 30 hours (thus k
f
= 60 steps).
Finally, the amount of extracted uranium for MPC and
PID is 4% higher than the open loop case.
R ≈ T
s
k
f
∑
k=0
O
E
(k)[U]
ogD
16
(k) (12)
If we continue the simulation in Fig. 7 and vary
O
E
as a varying parameter, the simulation result is
shown in Fig. 8. The disturbances appear at 30h, 60h,
and 90h with O
E
increase or decrease of 50% of O
E
from its nominal value, which is an important point
in the process. Consequently, the system needs to be
0
[U]
ogD*
16II
[U]
ogD
16
MPC
PID
Openloop
[U]
aqD
1,tol
[U]
aqD
1
MPC
PID
Openloop
A
F,min
A
0
F
A
F,max
A
F
MPC
PID
Openloop
0 5 10 15 20 25 30
0
O
0
E
Time (h)
O
E
Figure 7: Set-point tracking application with MPC, PID and
open loop controllers.
stabilized at its new optimal operating points shown
in Fig. 6. Furthermore, the differences are not so sig-
nificant, they converge to the openloop case.
0
[U]
ogD*
16a
[U]
ogD*
16c
[U]
ogD
16
MPC
PID
Openloop
[U]
aqD
1,tol
[U]
aqD
1
MPC
PID
Openloop
A
F,min
A
0
F
A
F,max
A
F
(L/h)
MPC
PID
Openloop
30 40 50 60 70 80 90 100 110 120
O
Ea
O
0
E
O
Ec
Time (h)
O
E
(L/h)
Figure 8: Set-point tracking application subject to distur-
bances with MPC, PID and open loop controllers.
4.2 Constraint Guaranteeing
One interesting question is that if, due to some rea-
sons, the system is over-saturated, can the controllers
eliminate the constraint violation and stabilize the
system at its set point? Fig. 9 illustrates this sce-
nario. The system is assumed to be initially steady
and over-saturated in this simulation. It can be seen
that only NMPC can quickly reduce [U]
aqD
1
to its tol-
erance. This result can be explained by the fact that
MPC considers all the state errors while PID only fo-
cuses on one controlled variable, [U]
ogD
16
. In addition,
NMPC explicitly handles the constraint (10) at every
time step. Furthermore, since [U]
aqD
1
is very sensitive
to A
F
, although the steady state control inputs are sim-
ilar (but not exactly equal), we have seen a significant
different in [U]
aqD
1
.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
42

0
[U]
ogD*
16b
[U]
ogD
16
(M)
MPC
PID
Openloop
[U]
aqD
1,tol
[U]
aqD
1
(M)
MPC
PID
Openloop
A
F,min
A
0
F
A
F,max
A
F
(L/h)
MPC
PID
Openloop
0 5 10 15 20 25 30
O
0
E
Time (h)
O
E
(L/h)
Figure 9: Set-point tracking with infeasible initial condition
with MPC, PID, and open loop controllers.
5 CONCLUSION
This paper presents an NMPC (Nonlinear Model Pre-
dictive Control) approach for the uranium extraction-
scrubbing operation in the PUREX process. It was
shown that this approach favors the process control
objectives in stabilizing the system at the optimal
working condition with constraints satisfaction. As a
result, the process performance was increased quan-
titatively in terms of the amount of extracted ura-
nium. This study provides a good reference for future
developments on controlling extraction cycles in the
PUREX process. Constraint handling is the key factor
that makes MPC more beneficial for practical appli-
cations than the classical PID. Future developments
include stability guarantees, uncertainties handling,
and verification with the qualified simulation code
PAREX (Bisson et al., 2016) as a virtual plant in mul-
tiple application scenarios. Moreover, future studies
will be conducted at more sensitive point in the pro-
cess. Furthermore, the development of an observer is
essential to provide an output feedback MPC scheme
with limited measurements. Finally, experiments will
be conducted to evaluate the practical implementation
aspects of the developed control scheme.
ACKNOWLEDGEMENTS
The authors thank ORANO for partial financial sup-
port for the project.
REFERENCES
Andersson, J. A. E., Gillis, J., Horn, G., Rawlings, J. B., and
Diehl, M. (2019). CasADi – A software framework
for nonlinear optimization and optimal control. Math-
ematical Programming Computation, 11(1):1–36.
Bisson, J., Dinh, B., Huron, P., and Huel, C. (2016).
PAREX, A Numerical Code in the Service of
La Hague Plant Operations. Procedia Chemistry,
21:117–124.
Dinh, B., Baron, P., and Duhamet, J. (2008). The PUREX
Processs: Separation and Purification Operations. In
Treatment and Recycling of Spent Nuclear Fuel, pages
55–70. Le Moniteur.
Gardner, D. J., Reynolds, D. R., Woodward, C. S., and Ba-
los, C. J. (2022). Enabling new flexibility in the SUN-
DIALS suite of nonlinear and differential/algebraic
equation solvers. ACM Transactions on Mathemati-
cal Software (TOMS).
Hindmarsh, A. C., Brown, P. N., Grant, K. E., Lee, S. L.,
Serban, R., Shumaker, D. E., and Woodward, C. S.
(2005). SUNDIALS: Suite of nonlinear and differen-
tial/algebraic equation solvers. ACM Transactions on
Mathematical Software (TOMS), 31(3):363–396.
James, R. and David, M. (2022). Model Predictive Control:
Theory, Computation, and Design. Nob Hill Publish-
ing.
Komulainen, T., Doyle III, F. J., Rantala, A., and J
¨
ams
¨
a-
Jounela, S.-L. (2009). Control of an industrial copper
solvent extraction process. Journal of Process Con-
trol, 19(1):2–15.
Mayne, D. Q., Rawlings, J. B., Rao, C. V., and Scokaert, P.
O. M. (2000). Constrained Model Predictive Control:
Stability and Optimality. Automatica, 36:789–814.
Seborg, D. E., Edgar, T. F., Mellichamp, D. A., and Doyle
III, F. J. (2016). Process Dynamics and Control. John
Wiley & Sons, 4th edition.
Seemann, R. C. (1973). Predictive Control of a Mixer-
settler Extractor Separating the Rare-Earths. Techni-
cal report.
Shahcheraghi, S. H., Mousavi, S. M., and Dianatpour, M.
(2021). An Improved Control Strategy for an Indus-
trial Copper Solvent Extraction Process. Separation
Science and Technology, 57(11):1745–1761.
Vaudano, A. (2008). Overview of Treatment Processes.
In Monograph - Treatment and recycling of spent nu-
clear fuel. Le Moniteur.
W
¨
achter, A. and Biegler, L. T. (2005). On the Implementa-
tion of an Interior-Point Filter Line-search Algorithm
for Large-scale Nonlinear Programming. Mathemati-
cal Programming, 106(1):25–57.
Yang, H., He, L., Zhang, Z., Lu, R., and Tan, C. (2016).
Multiple-Model Predictive Control for Component
Content of CePr/nd Countercurrent Extraction Pro-
cess. Information Sciences, 360:244–255.
Yang, H., Meng, S., Sun, B., Wang, X., and Zhong, L.
(2010). The Multiple Models Predictive Control of
Component Content for the Rare Earth Extraction
Procession. In 2010 8th World Congress on Intelli-
gent Control and Automation. IEEE.
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
43
