
Enhancing ε-Sampling in the AεSεH
Evolutionary Multi-Objective Optimization Algorithm
Yu Takei
a
, Hern´an Aguirre
b
and Kiyoshi Tanaka
Department of Electrical and Computer Engineering, Shinshu University, Wakasato, Nagano, Japan
Keywords:
Many-Objective Optimization, Pareto Dominance Extension, AεSεH, Improving ε-Sampling,
MNK-Landscapes.
Abstract:
AεSεH is one of the evolutionary algorithms used for many-objective optimization. It uses ε-dominance during
survival selection to sample from a large set of non-dominated solutions to reduce it to the required population
size. The sampling mechanism works to suggest a subset of well distributed solutions, which boost the per-
formance of the algorithm in many-objective problems compared to Pareto dominance based multi-objective
algorithms. However, the sampling mechanism does not select exactly the target number of individuals given
by the population size and includes a random selection component when the size of the sample needs to be ad-
justed. In this work, we propose a more elaborated method also based on ε-dominance to reduce randomness
and obtain a better distributed sample in objective-space to further improve the performance of the algorithm.
We use binary MNK-landscapes to study the proposed method and show that it significantly increases the
performance of the algorithm on non-linear problems as we increase the dimensionality of the objective space
and decision space.
1 INTRODUCTION
Many real-world problems require that multiple ob-
jective functions be optimized simultaneously. Multi-
objective evolutionary algorithms (Deb, 2001; Coello
et al., 2002) (MOEAs) are a class of algorithms
to solve these problems. MOEAs’ initial suc-
cess brought new challenges as their use became
widespread in numerous application domains.
There are several important areas of ongoing re-
search. Among them, the design of MOEAs to search
effectively and efficiently on problems with larger
search spaces, many objective functions, and robust-
ness to distinct shapes of the Pareto front and distinct
geometries of the Pareto set. Performance scalability
of the algorithm when facing increased complexity of
the search space, defined in terms of interacting vari-
ables, is also a challenge to state-of-art MOEAs and
an active research area.
This work deals mainly with manyobjective prob-
lems and increased complexity due to variable inter-
actions. It’s known that the performance of MOEAs
decreases as the objective space dimensionality in-
a
https://orcid.org/0009-0008-1481-0553
b
https://orcid.org/0000-0003-4480-1339
creases (von L¨ucken et al., 2019). Several research
efforts based on different approaches aim to improve
evolutionary algorithms for many-objective optimiza-
tion. These include decomposition into several single
objective problems, extensions of Pareto dominance,
and incorporation of performance indicators. It’s also
known that MOEAs’ performance drops when vari-
able interactions increase.
In this work, we focus on an algorithm based on
an extension of Pareto dominance, AεSεH (Aguirre
et al., 2013; Aguirre et al., 2014), and investigate
deeply its survival selection mechanism aiming to im-
prove its performance on many-objective problems
with varying degrees of variable interactions.
AεSεH includes ε-dominance(Laumanns et al.,
2002) for survival selection and parent selection. Dur-
ing survival selection, the algorithm samples from a
large set of non-dominatedsolutions to reduce it to the
required population size. The sampling mechanism
works to suggest a subset of solutions spaced accord-
ing to the ε parameter of ε-dominance, which boost
the performance of the algorithm in many-objective
problems compared to Pareto dominance based multi-
objective algorithms.
However, the sampling mechanism does not select
exactly the target number of individuals given by the
86
Takei, Y., Aguirre, H. and Tanaka, K.
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm.
DOI: 10.5220/0012181300003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 86-95
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

population size. In most cases there will be a sur-
plus or shortage of non-dominated individuals and an
adjustment to either cut-off or add non-dominated in-
dividuals is requiered. This adjustment process after
sampling is done by random selection in the conven-
tional algorithm. In this work, we improve the ad-
justment process by adding another step based on ε-
dominance to reduce randomness and obtain a better
distributed sample in objective-space to further im-
prove the performance of the algorithm.
We use MNK-landscapes (Aguirre and Tanaka,
2007) as benchmark problems. MNK-landscapes
are binary multi-objective maximization problems,
which can be randomly generated by arbitrarily set-
ting the number of objectives M, the number of de-
sign variables N, and the number of interacting vari-
ables K for each of the variables of the problem.
We conduct experiments on landscapes with M =
{4,5,6, 7} objectives, N = {100,300,500} bits and
K = {5, 6, 10,15,20} epistatic bits. We use vari-
ous metrics to evaluate the non-dominated solutions
found and show that the proposed method signifi-
cantly increases the performance of the AεSεH al-
gorithm on non-linear problems with increased di-
mensionality of the objective space and decision
space. Furthermore, an experimental comparison
with MOEA/D (Zhang and Li, 2007), a well known
MOEA, is included for reference.
2 ADAPTIVE ε-SAMPLING AND
ε-HOOD (AεSεH)
AεSεH is a multi- and many-objective evolution-
ary algorithm that includes mechanisms based on ε-
dominance for survival selection and parent selection.
For survival selection, it uses adaptive ε-Sampling to
expand the dominance region and sample the non-
dominated solution set, which becomes larger as the
number of objectives increases. On the other hand,
Adaptive ε-Hood is used to create neighborhoods in
objective space. When generating offspring, the par-
ents are selected from the same neighborhood.
2.1 ε-Dominance
In AεSεH, the ε-transformation function is applied to
the vector of evaluated values f
f
f(x
x
x) of a solution x
x
x to
transform it into f
f
f
′
(x
x
x). Considering a maximization
problem, we say x
x
x ε-dominates y
y
y when the vectors of
transformed values f
f
f
′
(x
x
x) and evaluated values f
f
f(y
y
y)
of another solution y
y
y satisfy the following conditions.
f
f
f(x
x
x) 7→
ε
f
f
f
′
(x
x
x)
∀i ∈ {1,··· ,M} f
′
i
(x
x
x) ≥ f
i
(y
y
y) ∧
∃i ∈ {1,··· ,M} f
′
i
(x
x
x) > f
i
(y
y
y),
(1)
where f
f
f(x
x
x) 7→
ε
f
f
f
′
(x
x
x) is a transformation function
controlled by the parameter ε.
2.2 ε-Sampling
In elitist multi-objective evolutionary algorithms sur-
vival selection is typically performed after joining
the parent and offspring populations. The number of
non-dominated solutions |F
1
| in this joined population
rapidly surpasses the population size |P|, particularly
when the number of objectives is larger than 3. When
this occurs, the surviving population is a subset of the
non-dominated set of solutions F
1
. ε-Sampling is a
method designed to obtain a well distributed sample
of non-dominated solutions from F
1
for the next gen-
eration. In the following we explain the process with
more detail.
1. The individuals in F
1
with the largest and small-
est evaluation values in each objectiveare selected
for survival, added to the ε-sampled front F
ε
1
and
deleted from F
1
.
2. One individual x
x
x is randomly selected from F
1
,
and f
f
f(x
x
x) is transformed to f
f
f
′
(x
x
x) by the ε-
transformation function using the parameter ε
s
.
We eliminate from F
1
the solutions that are ε-
dominated by x
x
x and add them to a subpopulation
of discarded solutions D. Move x
x
x to the first ε-
front F
ε
1
.
3. Step 2 is repeated until F
1
is exhausted.
4. If |F
ε
1
| is less than the population size |P| then
|P| − |F
ε
1
| individuals are randomly selected from
the subpopulation of discarded solutions D and
added to F
ε
1
. On the other hand, if |F
ε
1
| is larger
than |P| then |F
ε
1
| − |P| individuals are randomly
removed from F
ε
1
.
The above operations are used to select parent indi-
viduals well distributed in objective space.
2.3 ε-Hood
In AεSεH, ε-Hood is used to divide the parent pop-
ulation P in neighborhoods in the objective space,
and mating partners for recombination are deter-
mined within the neighborhoods(Aguirre et al., 2013;
Aguirre et al., 2014). ε-Hood uses a different parame-
ter ε
h
than ε-Sampling to generate neighborhood pop-
ulations based on ε-dominance.
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm
87

2.4 ε-Transformation Function
In this paper, MaxMedian is used as the ε-
transformation for each objective function as shown
below.
f
′
i
(x
x
x) = f
i
(x
x
x) + (ε× (max { f
i
(x
x
x) : x
x
x ∈ P}
− median { f
i
(x
x
x) : x
x
x ∈ P}))
(2)
Here, the ε-dominant region is determined by adding
to the fitness value ε multiplied by the difference be-
tween the maximum and median values of the i-th
function.
2.5 Adaptive Changes in ε
The parameters ε
s
of ε-Sampling is changed adap-
tively at each generation depending on the size of the
set of non-dominated solution sampled by ε-Sampling
NS (before the adjustment) and the population size
|P|.
if NS > |P|
∆ ← min(∆× 2,∆max)
ε
s
← ε
s
+ ∆
if NS < |P|
∆ ← max(∆× 0.5, ∆min)
ε
s
← max(ε
s
− ∆,0.0) (3)
In this paper, the initial values of ε
s
and ∆ are set
to ε
s0
= 0.0, ∆
0
= 0.005, ∆ to ∆
max
= 0.1, ∆
min
=
0.0000001.
To adapt ε
h
for ε-Hood we follow a similar pro-
cedure, comparing the created number of neighbor-
hoods with a desired number specified by the user
(Aguirre et al., 2013).
3 AεSεH SHORTCOMING
ε-Sampling does not select exactly the target number
of individuals from the set of non-dominated solu-
tions. In most cases there will be a surplus or shortage
of individuals and an adjustment to either cut-off or
add individuals will be done by random selection to
achieve the target number of individuals (section 2.2,
Step 4). To illustrate this, after ε-Sampling is per-
formed, the degree of random selection is checked by
actually solving MNK-landscapes test problem. The
parameters given to the MNK-landscapes and evolu-
tionary algorithm are shown in Table 1 and Table 2.
For each value of M, the same MNK-landscape is
solved 30 times from different random initial popu-
lations. Two-point crossover and bit-flip mutation are
used as operators.
Table 1: Parameters of MNK-landscapes.
Parameters Value
Number of Objectives M 4, 5, 6, 7
Number of Variables N 100
Number of Interacting Variables K
5
Variables Interaction Random
Table 2: Parameters of EA.
Parameters Value
Generations G 10,000
Population Size |P|
200
Mutation Ratio P
m
1/N
Figure 1 shows the number of non-dominated in-
dividuals before and after ε-Sampling, averaged over
30 trials for each generation. As expected, note that
the number of pre-sampled non-dominated solutions
increased with the dimensionality of the objective
space. Looking at the difference between popula-
tion size and the number of solutions after sampling,
note that the application of ε-Sampling resulted in the
random selection of less than 25 individuals for four
objectives and approximately 50 individuals for five
and more objectives. From the above, it can be seen
that there is always a random part in the selection of
surviving individuals by ε-Sampling, which increases
with the number of objectives. In the problem set up
for this experiment, this increase in random selection
is particularly noticeable when the number of objec-
tives increased from four to five.
Figure 1: Average number of individuals before and after
ε-Sampling. Top 4 objectives, bottom 5 objectives.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
88

It is likely that the individuals randomly selected
may disrupt the adequately spaced populations ob-
tained by ε-Sampling. In the next section, we propose
a method that aims to enhance ε-Sampling by select-
ing all individuals appropriately spaced.
4 PROPOSED METHOD
4.1 Reducing Randomness in Survival
Selection
As a method to reduce the random selection in ε-
Sampling, we consider applying ε-dominance again
after ε-Sampling to a reference subpopulation of non-
dominated solutions (explained with detail in section
4.2). In this case, a different ε-transformation func-
tion is used with a new ε, in addition to the expan-
sion ratio ε
s
adapted throughout all the generations in
ε-Sampling. The new ε is computed by estimating
the mean distance in objective space of the top-rating
individuals. Several iterations of sampling over in-
creasingly smaller reference subpopulations, resetting
ε appropriately, are repeated until the target number
of individuals is reached. This method is expected to
achieve better uniformity in the selected sample than
the conventional method.
In the following we deatil the main steps of the
proposed method. The procedure receives a reference
set of solutions R from which a target number N
S
must
be sampled, i.e. |R| − N
S
solutions must be deleted
from R. It returns a sample S ∈ R of size |S| = N
S
.
1. Set the iteration counter k ← 1 and the maximum
number of iterations T. Also, set the initial sam-
pling population R
k
← R and save its size for ref-
erence N
R
← |R|.
2. Set a base expansion value u
ki
for each
one of the M objective functions, u
u
u
k
←
(u
k1
,··· ,u
ki
,··· ,u
kM
) according to the distribu-
tion of R
k
. Set the sample to empty, S
k
← ∅. Set
the set of discarded solutions to empty, D
k
← ∅.
3. Select one solutiom x
x
x randomly from R
k
and
transform its vector of fitness values f
f
f(x
x
x) to f
f
f
′
(x
x
x)
using u
u
u
k
and ε
k
. Use the f
f
f
′
(x
x
x) vector to compute
ε-dominance between x
x
x and the other solutions in
R
k
. Remove solutions in R
k
that are ε-dominated
by x
x
x and add them to the set D
k
of discarded solu-
tions. Remove x
x
x from R
k
and add it to the set S
k
of sampled solutions.
4. Repeat Step 3 if R
k
6= ∅ (not empty). Otherwise,
continue with Step 5.
5. If |S
k
| > N
S
and k < T then resample from S
k
; that
is, increase the iteration counter k ← k+ 1, set the
new current sampling population R
k
← S
k−1
. Up-
date the expansion rate ε
k
← ε
k−1
× ∆ and repeat
from Step 2. Otherwise, continue to Step 6.
6. If the sample size is not exactly equal to the num-
ber required then adjust the sample size randomly.
That is, if |S
k
| > N
S
eliminate randomly |S
k
| − N
S
solutions from S
k
. Otherwise, if |S
k
| < N
S
, select
randomly N
S
− |S
k
| solutions from the current set
of discarded solutions D
k
and add them to S
k
.
7. Return S
k
The base expansion value u
ki
at the k-th iteration of
the procedure for the i-th fitness function is computed
as shown in (4) below.
u
ki
=(max { f
i
(x
x
x) : x
x
x ∈ R
k
}
− median { f
i
(x
x
x) : x
x
x ∈ R
k
})/(
n
k
2
+ 1)
(4)
where n
k
is the number of individuals in the sampling
population R
k
, max
k
and median
k
are the maximum
and median values in the i-th objective function com-
puted from R
k
. The ε-transformation function at the
k-th iteration to expand the i-th fitness value of the
solution is as shown in (5) below.
f
′
i
(x
x
x) = f
i
(x
x
x) + u
ki
× ε
k
,
(5)
where u
ki
is the base expansion value and ε
k
is the
expansion rate.
As mentioned above, the expansion rate ε
k
is up-
dated at each iteration k of the procedure as shown in
(6) below.
ε
k
= ε
k−1
× ∆
ε
0
= 1
∆ = 1.05,
(6)
where the constat ∆ > 0 works to increase ε
k
at each
iteration to prevent the number of iterations from be-
coming too large.
Note that for the base expansion u
ki
in (4) we
use a value slightly smaller than the average dis-
tance between the top-rating individuals in the i-th
objective. This means that the individuals eliminated
by ε-dominance when ε
k
= 1 are those whose inter-
individual distance in objective space is closer than
the mean of the top-rating individuals.
In this paper, experiments are conducted with the
maximum number of iterations T = 100. Regard-
ing the time complexity of the proposed method, the
lower bound is 0 (when the sample size given by
ε-Sampling equals the population size) and the up-
per bound is given by |R|
2
× T. Box plots of the
actual number of iterations k < T required by the
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm
89
4 5 6 7
The Number of Objectives M
0
20
40
60
80
100
The Iteration Counter k
Figure 2: The iteration counter k for each objectives.
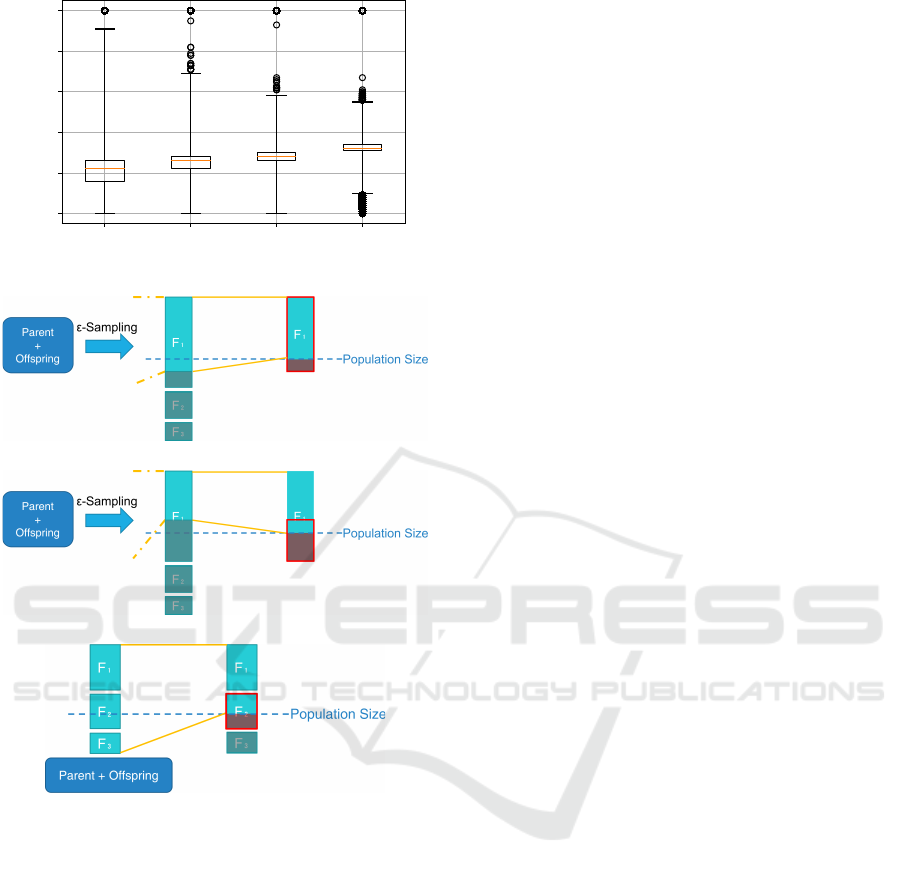
(a) Surplus of individuals by ε-Sampling.
(b) Shortage of individuals by ε-Sampling.
(c) Application to lower front.
Figure 3: Cases where the proposed method will be used.
proposed method are shown in Figure 2 for M =
{4,5,6, 7},N = 100 and K = 5 computed over 10,000
generations and 30 runs of the algorithm. Note that
the median k falls between 20 and 30 iterations.
4.2 Cases in Which the Proposed
Method Will be Used
Depending on the number of individuals after ε-
Sampling is performed, the proposed method can be
applied to the three different cases illustrated in Fig-
ure 3 and listed below.
4.2.1 Selection in Case of Surplus
If the number of individuals sampled by ε-Sampling
exceeds the target population size, the proposed
method is performed on the sample provided by ε-
Sampling as shown in Figure 3a. Then, the sample
returned by the proposed method becomes the popu-
lation for the next generation.
4.2.2 Selection in Case of Shortage
If the number of individuals sampled by ε-Sampling
is less than the target number, the proposed method
is performed on the sub-population of non-dominated
individuals initially discarded by ε-Sampling as
shown in Figure 3b. Then the sample provided by
ε-Sampling and the one returned by the proposed
method are joined to form the population for the next
generation.
4.2.3 Selection in Lower Front
If the number of individuals in the top front is less
than the target number, ε-Sampling is not performed.
In this case, the top fronts are allowed to survive, and
the proposed method is performed on the last front
that overflowed the size of the surviving population
as shown in Figure 3c. The sample returned by the
proposed method is joined to the top fronts to form
the population for the next generation.
5 EXPERIMENTAL METHOD
AND EVALUATION
INDICATORS
5.1 Experimental Method
To examine in detail the effects on solution search by
the proposed method, we first solve MNK-landscapes
(Aguirre and Tanaka, 2007) varying M from 4 to 7
fixing N = 100 and K = 5 and starting from 30 ini-
tial populations generated with different seeds. The
parameters and other conditions used in the experi-
ments are the same as those used in Table 1 and Ta-
ble 2. Next, we perform experiments varying N =
{100, 300,500} and K = {5, 6, 10,15,20}.
In order to objectively evaluate the proposed
method, we also compare the results with those ob-
tained by MOEA/D (Zhang and Li, 2007), a represen-
tative decomposition based multi-objectiveevolution-
ary algorithm often applied for many-objective opti-
mization. In this experiment, the scalarization func-
tion of MOEA/D is Tchebycheff,which is suitable for
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
90
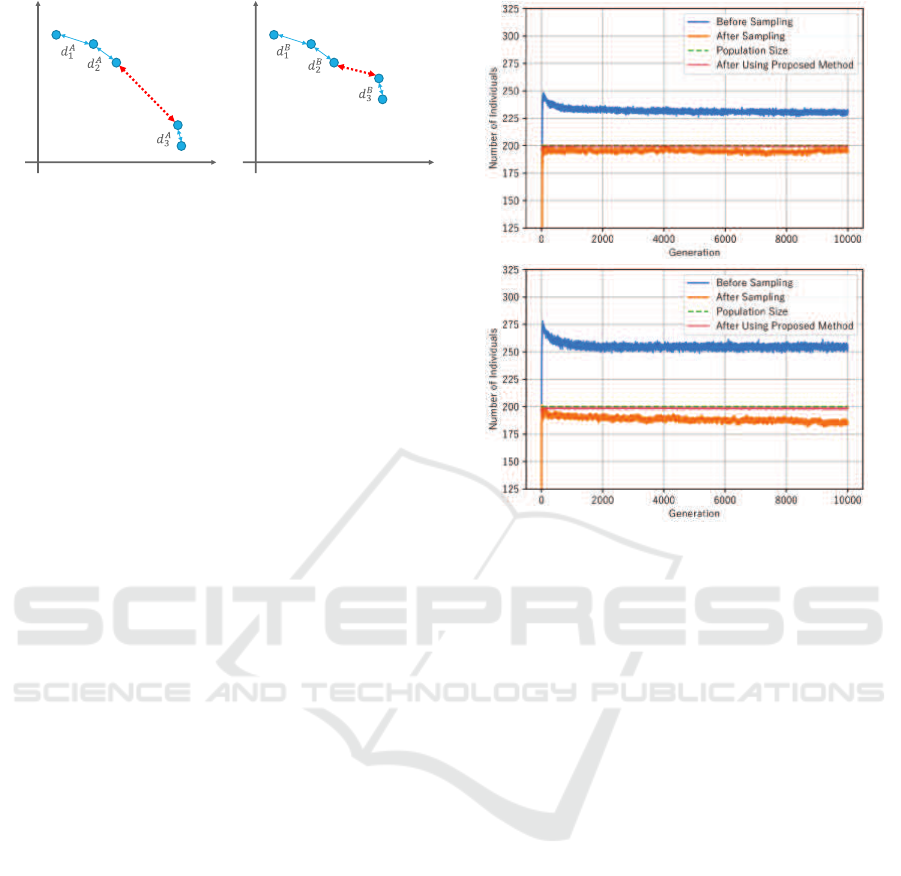
(a) Population A (b) Population B
Figure 4: Example of populations with equal SP.
nonlinear discrete problems, and the neighborhood
size is set to the commonly used value of 20.
The evaluation indexes shown in the next section
are used to evaluate the sets of solutions found by the
algorithms.
5.2 POS Evaluation Indicators
In this study, to evaluate the Pareto optimal solutions
set (POS) obtained by the optimization algorithm, we
use the Hypervolume (HV) (Zitzler, 1999; Fonseca
et al., 2006). To validate the features of the obtained
POS, we also use the Coverage-metric (C-metric),
Overall Pareto Spread (OS), Spacing (SP), and Distri-
bution Metric (DM) (Audet et al., 2021; Zheng et al.,
2017).
Note that the distribution of solutions may cause
problems in the calculation of SP. Consider two
populations that satisfy (d
A
1
,d
A
2
,d
A
3
) = (d
B
1
,d
B
2
,d
B
3
) as
shown in Figure 4. Note that these two populations
clearly have different homogeneity, but when looking
at the distance d
i
to the nearest solution used to calcu-
late SP, they have exactly the same value. That is, SP
calculated from these values will be exactly the same.
Thus, large distances between multiple neighborhood
groups, such as in Figure 4a, cannot affect the value
of SP and therefore it becomes an unreliable metric in
these situations. DM is an indicator to measure diver-
sity that does not suffer the problem observed in SP
calculation.
6 RESULTS AND DISCUSSION
6.1 Changes in the Actual Number of
Selected Individuals
First, we verify the number of individuals before sam-
pling, after selection by ε-Sampling, and after apply-
ing the proposed method, averaged over 30 trials for
each generation. Results are shown in Figure 5. It
can be seen that the proposed method is able to se-
Figure 5: Population averages before and after ε-Sampling
and after applying the proposed method. N = 100,K = 5,
top 4 objectives, bottom 5 objectives.
lect most of the individuals that were randomly se-
lected by the conventional method i.e. pink line is
similar to the population size shown in green. Com-
paring the number of individuals after sampling with
that of the conventional method shown in Figure 1, it
can be seen that when the proposed method is used ε-
Sampling selects samples which size are closer to the
target number for all numbers of objectives (orange
line). In other words, ε-dominance performed after ε-
Sampling, in addition to reducing randomness, helps
improve ε-Sampling itself.
6.2 POS Evaluation
Next, we evaluate the POS using the indicators listed
above and compare results by the conventional and
proposed method every 1,000 generations using box-
and-whisker diagrams. Welch’s t-test is performed for
the evaluation values of the last generation to deter-
mine if there is a significant difference between the re-
sults of the conventional and proposed methods based
on the obtained p-values included in Table 3.
Figure 6 shows the HV over the generations by
AεSεH and its improved version with the proposed
method. These plots and the p-values of the HV row
in Table 3 show that in terms of HV there is a sig-
nificant difference in performance by both algorithms
for five or more objectives, and that performance im-
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm
91

Figure 6: HV obtained in 30 runs. N = 100,K = 5, left to right, top 4, 5 objectives and bottom 6, 7 objectives.
Figure 7: C-metric meassured in 30 runs. N = 100,K = 5, left to right, top 4, 5 objectives and bottom 6, 7 objectives.
Table 3: p-value in the last generation.
Ind.
Number of Objectives M
4 5 6 7
HV 8.62e-01 2.18e-04 1.41e-11 1.81e-14
C 6.80e-03 4.53e-07 1.05e-06 4.07e-11
OS 6.53e-01 6.44e-01 4.40e-01 1.94e-01
SP 1.56e-04 2.64e-06 2.94e-06 9.91e-02
DM 3.85e-01 1.19e-02 2.42e-01 2.25e-01
proves as the number of objectives increases.
Figure 7 shows results by the C-metric.
C(AεSεH,Improved) represents the proportion
of the POS found by the proposed method that is
dominated by the POS found by the conventional
method, and C(Improved,AεSεH) represents the
opposite. The results show that convergence im-
proved for all objectives tested, and this difference
becomes more significant as the number of objectives
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
92

Figure 8: SP meassured in 30 runs. N = 100,K = 5, left to right, top 4, 5 objectives and bottom 6, 7 objectives.
increases. The p-values for the C-metric in Table 3
support this.
The p-values for the OS in Table 3 show that there
is no statistical difference on spread by both methods.
This is because the solutions with maximum and min-
imum evaluation values for each objective are kept,
which is performed before applying ε-Sampling.
Figure 8 shows results on spacing computing SP.
From Table 3, we can see that there is a significant
difference in SP except for 7 objectives. In addition,
the mean and variance are considerably smaller by the
proposed method for all numbers of objectives as can
be observed in Figure 8, which indicates that the uni-
formity is better in the proposed method.
The p-values for the DM in Table 3 show that no
clear statistical differences between the two methods
for DM.
6.3 Discussion
There is a statistically significant improvement in HV
by the proposed method for many objectiveproblems.
To have a better understanding on the effects of the
proposedmethod and determine whether the improve-
ment is due to convergence or diversity we looked to
other metrics.
First, C-metric shows that the convergence of
POS improves regardless of the number of objectives.
Also, the convergencedifference between the conven-
tional and proposed methods becomes larger as the
number of objectives increases. Next, in terms of di-
versity, there was no difference in spread (OS), and
while there was an improvement and stabilization in
terms of uniformity (SP), there was no improvement
in overall diversity (DM). This may be due to the
aforementioned shortcomings of SP. While SP can
only evaluate local uniformity, DM evaluates the di-
versity of the entire distribution of solutions. This in-
dicates that the diversity has not improved when look-
ing at the set of non-dominated solution as a whole,
but it has improved locally. In other words, although
uniformity is improved within groups of neighbor so-
lutions, there is distance between the groups, and the
distribution cannot be said to be uniform when viewed
across the entire objective space.
From the above, it can be inferred that the solution
search performance for each neighborhood improves
as a result of better local uniformity, which improves
the convergence of the solution group as a whole.
Given that there is a correlation between the increase
in the number of objectives and the improvement in
convergence, uniform solution search becomes more
important as the dimension of the objective space ex-
pands.
The fact that the proposed method also improves
the accuracy of ε-Sampling as a side effect was re-
vealed from the visualization of the actual selection
of the proposed method. This is due to the improved
uniformity of the solution distribution, which allows
a more precise estimation of ε
s
between generations.
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm
93

Table 4: p-value in the last generation for each N.
N
M
4 5 6 7
100 8.62e-01 2.18e-04 1.41e-11 1.81e-14
300 6.10e-06 8.16e-09 8.70e-12 9.63e-15
500 1.34e-06 7.67e-08 8.71e-12 1.88e-13
Figure 9: HV obtained at the last generation in 30 runs vary-
ing the number of variables N. M = 6,N = {100,300,500}
and K = 5.
6.4 Comparison Varying N and K
In this section we verify the performance of the pro-
posed method increasing the complexity of the prob-
lem and the dimension of the search space.
Figure 9 shows results for M = 6 objectives and
K = 5 bits, N from 100 to 500. Note that the pro-
posed method performs significantly better than the
conventional approach when we increase the size of
the search space. In addition, note that the variance is
smaller by the proposed method. This is corroborated
by the p-values in Table 4, which also includes results
for other values of M.
Table 5: p-value in the last generation for each K.
K
M
4 5 6 7
5 8.62e-01 2.18e-04 1.41e-11 1.81e-14
6 9.77e-01 1.35e-05 4.56e-14 8.58e-16
10 1.57e-01 6.78e-03 1.55e-10 1.28e-14
15 3.57e-01 3.41e-02 1.60e-05 4.05e-10
20 4.23e-01 1.80e-01 4.08e-03 3.88e-04
Figure 10 shows results for M = 6 objectives and
N = 100 bits, varying K from 6 to 20. Note that
the proposed method performs significantly better in
a broad range of K and that the advantage gradually
decreases as K increases. The reason why the perfor-
mance for K = 20 by both methods become similar is
that the number of sampled solutions by ε-Sampling
approaches the desired population size, as shown in
Figure 11, leaving little room for the proposed method
Figure 10: HV obtained at the last generation in 30 runs
varying the number of interacting variables K. M = 6,N =
100 and K = {5,6, 10,20}.
Figure 11: Average number of individuals before and after
ε-Sampling. M = 6,N = 100, top K = 10, bottom K = 20.
to improve the sample. Similar results in favor of the
proposed method are observed with other values of M
when we vary K, as corroborated by the p-values in
Table 5.
6.5 Comparisson with Other MOEA
Decomposition based algorithms are being broadly
used for many-objective optimization. To illustrate
the relative performance of the improvedAεSεH with
respect to these kind of algorithms, we also conduct
experiments with MOEA/D, a well known decompo-
sition based algorithm. Figure 12 shows the transi-
tion of the HV over the generations by the improved
AεSεH and MOEA/D on M = 5,6 objectives, N =
100 bits and K = 5 epistatic interactions. From the
figure we can see that the improved AεSεH achieves
a significantly better HV than MOEA/D. Note that
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
94

Figure 12: Comparisson with MOEA/D. K = 5,N = 100,
top 5 objectives, bottom 6 objectives.
the performance of the proposed algorithm at the
2,000th generation is already better than MOEA/D at
the 10,000th generation.
7 CONCLUSIONS
In this study, we focused on the ε-Sampling part of
Adaptiveε-Sampling and ε-Hood (AεSεH) algorithm,
and confirmed through experiments that AεSεH per-
forms better solution search with the improved pro-
posed method. This performance improvement was
more pronounced as the number of objectives in-
creased. This is attributed to the increased impor-
tance of a search process that emphasizes solution
uniformity in response to the expansion of the objec-
tive space as the number of fitness functions increase.
Since AεSεH is an algorithm developed for multi-
and many-objective optimization, this improvement
reinforces its many-objective characteristics. We also
found that improving solution uniformity leads to
the generation of solution distributions that are more
prone to ε-Sampling with high accuracy. In addition,
we showed that AεSεH scales up well with the di-
mension of the search space and complexity of the
problem.
In the future, we would like to explore dynamic
schedules for the amplification factor in the proposed
scheme, reflecting, for example, the size of the tar-
get population and the number of target individuals,
which would not only further reduce randomness but
also reduce the number of calculations.
REFERENCES
Aguirre, H., Oyama, A., and Tanaka, K. (2013). Adap-
tive ε-Sampling and ε-Hood for Evolutionary Many-
Objective Optimization. In Evolutionary Multi-
Criterion Optimization (EMO 2013). Lecture Notes
in Computer Science, volume 7811, pages 322–336.
Springer Berlin Heidelberg.
Aguirre, H., Yazawa, Y., Oyama, A., and Tanaka, K.
(2014). Extending AεSεH from Many-objective to
Multi-objective Optimization. In Simulated Evolution
and Learning (SEAL 2014). Lecture Notes in Com-
puter Science, volume 8886, pages 239–250. Springer,
Cham.
Aguirre, H. E. and Tanaka, K. (2007). Working Princi-
ples, Behavior, and Performance of MOEAs on MNK-
landscapes. European Journal of Operational Re-
search, 181(3):1670–1690.
Audet, C., Bigeon, J., Cartier, D., Le Digabel, S., and Sa-
lomon, L. (2021). Performance Indicators in Multi-
objective Optimization. European Journal of Opera-
tional Research, 292(2):397–422.
Coello, C., Van Veldhuizen, D., and Lamont, G. (2002).
Evolutionary Algorithms for Solving Multi-Objective
Problems. New York, Kluwer Academic Publishers.
Deb, K. (2001). Multi-Objective Optimization using Evolu-
tionary Algorithms. John Wiley & Sons.
Fonseca, C. M., Paquete, L., and L´opez-Ib´anez, M.
(2006). An Improved Dimension-Sweep Algorithm
for the Hypervolume Indicator. In 2006 IEEE In-
ternational Conference on Evolutionary Computation,
pages 1157–1163. IEEE.
Laumanns, M., Thiele, L., Deb, K., and Zitzler, E. (2002).
Combining Convergence and Diversity in Evolution-
ary Multiobjective Optimization. Evolutionary Com-
putation, 10(3):263–282.
von L¨ucken, C., Brizuela, C., and Bar´an, B. (2019).
An Overview on Evolutionary Algorithms for Many-
Objective Optimization Problems. Wiley Interdisci-
plinary Reviews: Data Mining and Knowledge Dis-
covery, 9(1):e1267.
Zhang, Q. and Li, H. (2007). MOEA/D: A Multiobjec-
tive Evolutionary Algorithm based on Decomposi-
tion. IEEE Transactions on Evolutionary Computa-
tion, 11(6):712–731.
Zheng, K., Yang, R.-J., Xu, H., and Hu, J. (2017). A
New Distribution Metric for Comparing Pareto Opti-
mal Solutions. Structural and Multidisciplinary Opti-
mization, 55:53–62.
Zitzler, E. (1999). Evolutionary Algorithms for Multiobjec-
tive Optimization: Methods and Applications. PhD
thesis, Diss. ETH No 13398, Swiss Federal Institute
of Technology Zurich.
Enhancing ε-Sampling in the AεSεH Evolutionary Multi-Objective Optimization Algorithm
95
