
An Observer Design Method Using Ultra-Local Model for Autonomous
Vehicles
Daniel Fenyes
1 a
, Tamas Hegedus
1
, Vu Van Tan
2
and Peter Gaspar
1,3
1
Institute for Computer Science and Control (SZTAKI), E
¨
otv
¨
os Lor
´
and Research Network (ELKH),
Kende u. 13-17, H-1111 Budapest, Hungary
2
Department of Automotive Mechanical Engineering, Faculty of Mechanical Engineering,
University of Transport and Communications, 3 Cau Giay Street, 100000 Hanoi, Vietnam
3
Department of Control for Transportation and Vehicle Systems, Budapest University of Technology and Economics,
Stoczek u. 2, H-1111 Budapest, Hungary
Keywords:
Observer, Model-Free Control, Ultra-Local Model, Lateral Velocity, Autonomous Vehicles.
Abstract:
The paper presents a novel observer design algorithm for autonomous vehicles. The technique is based on
the combination of a classical linear observer and the ultra-local model. The linear observer is easy to design
and it requires only a linear model of the considered system. However, it performs poorly when the linear
system cannot cover the system’s dynamics due to nonlinearities or unmodelled dynamics. The ultra-local
model aims to compensate for the nonlinear effects and improve the overall performances of the observer.
The proposed method is applied to a vehicle-oriented estimation problem: lateral velocity. The operation and
the effectiveness of the presented algorithm is demonstrated through several test scenarios in CarSim and also
using real-test measurements.
1 INTRODUCTION AND
MOTIVATION
The biggest challenges of the automotive industry are
related to the development of highly automated, au-
tonomous vehicles. Safe and reliable operation in ev-
ery possible traffic situation is a prerequisite for the
widespread of fully autonomous vehicles. The algo-
rithm, which is responsible for vehicle control, con-
tains several layers such as sensing, decision-making,
and trajectory tracking. To guarantee the stable mo-
tion of the vehicle, the control systems require the
continuous measurement of several states of the car
such as velocities, angular velocities, and positions.
Some of these signals can be well-measured using
conventional onboard systems e.g. the angular veloc-
ities. However, other states are not directly measur-
able, e.g. lateral velocity. The estimation of the lat-
eral velocity of the vehicle is a common problem, for
which several solutions have been developed in the
past decades. These solutions can be divided into two
main groups:
• Model-based algorithms, which rely on mathe-
a
https://orcid.org/0000-0002-6143-5599
matical formulation of the vehicle dynamics.
• Non-model-based algorithms, which do not re-
quire a model but need a lot of training data of the
vehicle dynamics, e.g. machine learning-based
solutions.
One of the most common approaches to estimate
the lateral velocity of the vehicle is Kalman filtering
method. This technique combines several measure-
ments from different sensors such as GPS and IMU
with a kinematic model of the vehicle, see (Chu et al.,
2010). The original Kalman filter can solely han-
dle linear models, which results in conservative solu-
tions. However, the extended Kalman filter is able to
deal with nonlinear models using linearization meth-
ods around operating points of the system, see (Huang
et al., 2017) . Although these solutions have already
been successfully applied to the estimation problem,
they have serious drawbacks. Since Kalman-filter-
based methods rely on accurate GPS signals, signal
loss, which may occur, significantly reduces their per-
formance level.
Other model-based approaches use the classi-
cal observation technique such quadratic optimiza-
tion method (LQ) or polytopic modeling framework
(LPV). To apply these techniques the considered sys-
Fenyes, D., Hegedus, T., Van Tan, V. and Gaspar, P.
An Observer Design Method Using Ultra-Local Model for Autonomous Vehicles.
DOI: 10.5220/0012184300003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 41-49
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
41

tem must be observable, which means that certain
states of the system must be measurable.
LQ approach requires a linear model of the sys-
tem, which is convenient in terms of the design pro-
cess. But in the case of highly nonlinear systems, they
provide less accurate estimations. LPV framework al-
lows integrating a set of linear models to cover the
whole nonlinear dynamics of the considered system,
see (Kang et al., 2018),(Breschi et al., 2020). The
advantages of the model-based methods include that
they can provide theoretical guarantees. However, the
efficiency and accuracy of these methods are signif-
icantly influenced by the modeling process and the
accuracy of the yielded mathematical model. In addi-
tion, the effects of changing parameters must be taken
into account to avoid performance degradation.
The second group of methods consists of solu-
tions, which do not require a nominal model of the
system, such as machine learning-based, and data-
based approaches. In (Du et al., 2010) a neural
network-based solution is presented for estimating the
side-slip of the vehicle. Pace regression can also
be used to determine the side-slip angle as proposed
in (Fenyes et al., 2018). The advantage of these
solutions is that the lack of the modeling process
makes the design process easier, and also the non-
linear and uncertain effects can be handled more ef-
ficiently. However, these methods cannot provide
stability guarantees, which are essential for safety-
critical applications. There are other solutions, which
aim to combine the classical and non-model-based ap-
proaches to eliminate their individual drawbacks. For
example, in (Zhang et al., 2021) a method is proposed,
which uses a Kalman filter and a neural network to
compensate the effect of the possible GPS signal loss.
During the last decade, a new tool came up to ef-
ficiently solve modeling-related problems, called the
ultra-local model-based approach (Fliess and Join,
2013). The motivation behind the original structure
is to approximate the system in the given operating
point. This means that the nonlinearities and uncer-
tainties can be handled using the ultra-local model.
However, the original concept has been proposed for
a control system, and several works have been pub-
lished in the field of observer design. In (Al Younes
et al., 2015) a nonlinear observer method is proposed
for aerial vehicles using the combination of the ultra-
local model-based technique and a Thau observer de-
sign.
This paper aims to combine a linear observer de-
sign method for lateral velocity estimation with the
results of the ultra-local model-based approach using
real test datasets. The original structure is modified
to take into account a priori knowledge of the system.
The modified structure is called the error-based ultra-
local model (Heged
˝
us et al., 2022). Then, the whole
design process is carried out for a vehicle model with
a nominal parameter set. The advantage of the com-
bined solution is that by using the ultra-local model-
based part of the algorithm, the differences between
the nominal model and the real system can be han-
dled effectively. The proposed algorithm is tested on
real measurement data with different test scenarios.
The test scenarios have been carried out on ZalaZone
proving ground using a Lexus RH450 test vehicle.
The paper is structured as follows: Section 2
presents the error-based ultra-local model and gives
a short introduction to LQ observer design, then de-
tails the combined design approach. In section 3, the
vehicle-oriented example is presented including the
main steps. The effectiveness of the proposed algo-
rithm is demonstrated in the vehicle simulation soft-
ware, CarSim and using real test measurements in
Section 4 . Finally, the conclusion of the paper is sum-
marized in Section 5.
2 OBSERVER DESIGN USING
ULTRA-LOCAL MODEL
2.1 Error-Based Ultra-Local Model
The core idea of the error-based ultra-local model is
to create two ultra-local models: First one is com-
puted from the measured signals, second one is de-
rived from reference signals. Then, the error-based
ultra-local model (∆
nom
) is calculated as the deviation
of two ultra-local models, see (Fenyes et al., 2022):
y
(ν)
= F + αu (1a)
y
(ν)
re f
= F
nom
+ αu
nom,re f
(1b)
y
(ν)
− y
(ν)
re f
| {z }
e
(ν)
= F − F
nom
| {z }
∆
nom
+αu − αu
nom,re f
| {z }
α ˜u
(1c)
e
(ν)
= ∆
nom
+ α ˜u (1d)
where F is the ultra local model, u control signal, y
measured output, ν order of derivative, α denotes a
free tuning parameter, y
re f
is the reference output sig-
nal, u
nom,re f
denotes the referene control input The
reference signal y
re f
and the corresponding reference
input signal, u
nom,re f
.
Finally, the additional control input ( ˜u), which
compensates the unmodelled dynamics of the system,
can be computed as:
˜u =
−∆
nom,est
α
, (2)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
42
2.2 Discrete Linear Quadratic Observer
Linear Quadratic Observer design is based on a dis-
crete state-space representation of the considered sys-
tem, which can be written, in general form, as:
x(k + 1) = Φx(k) + Γu(k) (3a)
y(k) = c
T
x(k) (3b)
where Φ, Γ, c
T
are state matrices, x is the state-vector,
y is the output of the system, u is the control input
while k denotes the time step. The estimated state-
vector is computed as:
ˆx(k + 1) = Φ ˆx(k) + L(c
T
x(k) − c
T
ˆx(k)) (4)
The goal of the observer design to minimize the error
between the estimated states ˆx and the real states x:
e = x − ˆx, |e| → min! (5)
The error system can be written as (Kang and Kim,
2020):
e(k + 1) = Φe(k) − L(c
T
x(k) − c
T
ˆx(k)) = (6)
= (Φ − Lc
T
)e(k) (7)
where L is the gain-vector, which contains the opti-
mized gains for the observer.
This gain-vector can be computed by minimizing
the following cost function:
J =
1
2
∞
∑
i=1
(z
T
1
(i)Qz
1
(i) + z
T
2
(i)Rz
2
(i)) (8)
where z
1
= x − ˆx is the performance, which minimizes
the error between the real and estimated states, and
z
2
= L(y − ˆy) is the control signal for correcting the
estimated states while Q and R are weighting matri-
ces. The optimal gain vector (L ) can be computed by
the discrete time algebraic Ricatti equation, which can
be formed as:
ΦP + PΦ
T
− Pc
T
R
−1
cP + Q = 0 (9)
L
T
= Pc
T
R
−1
(10)
where P > 0.
3 VEHICLE-ORIENTED
APPLICATION
In the followings, the proposed observer design is pre-
sented for a vehicle-oriented estimation problem. The
observer design consists of the following main steps:
1. The determination of the nominal model.
2. Selection of the required derivative order (ν).
3. Computation of the nominal reference signals
(u
nom,re f
,y
ν
re f
)
4. Tuning of the parameter α.
5. Design of LQ observer based on the nominal
model.
6. Finally, the estimated states can be computed
as: ˆx(k + 1) = Φ ˆx(k) + Γ(u(k) −∆(k))+ L(y(k) −
ˆy(k))
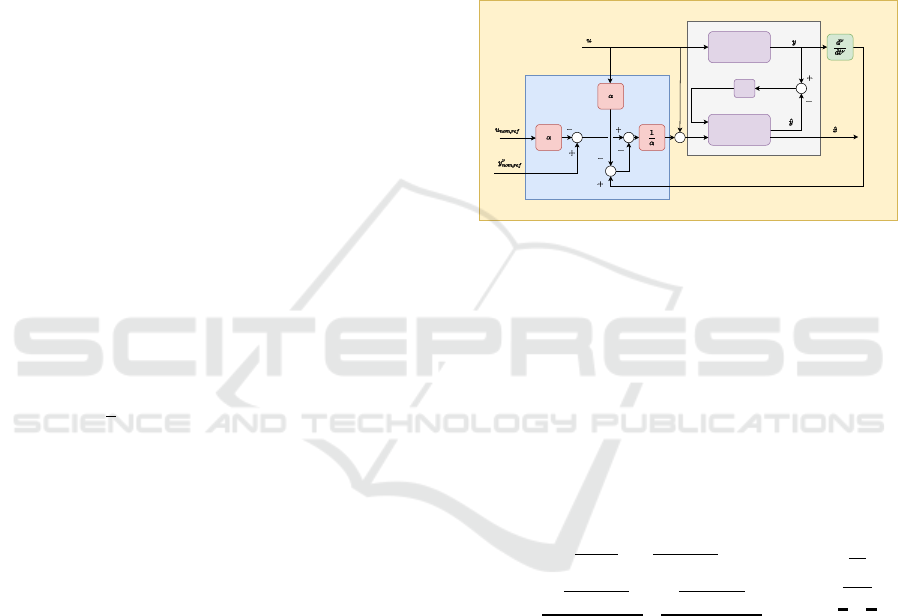
The structure of the observer algorithm is illustrated
in Figure 1.
System
Model
L
State observer
Error-based ultra-local model
Combined observer
Figure 1: The structure of the proposed observer.
3.1 Determination of the Nominal
Model
In this paper, the one-track bicycle model is used dur-
ing the modeling phase of the lateral vehicle dynamics
(Rajamani, 2005). The basic idea behind this model
is that the front and rear wheels are replaced by one
wheel each placed on the longitudinal axis of symme-
try of the vehicle. The state-space representation of
the model is given as:
¨y
¨
ψ
=
−
C
f
+C
r
mv
x
C
f
l
f
−C
r
l
r
mv
x
− v
x
−
C
f
l
f
−C
r
l
r
I
z
v
x
−
C
f
l
2
f
+C
r
l
2
r
I
z
v
x
| {z }
A
v
˙y
˙
ψ
+
"
C
f
m
C
f
l
f
I
z
#
| {z }
B
v
δ
(11)
with c
T
v
= [0 1].
˙
ψ denotes the yaw-rate and I
z
is the yaw-inertia of the
vehicle. Moreover, C
i
gives the cornering stiffness of
the tires of the front and rear axes and β is the side-
slip angle. Moreover, l
i
gives distance from the axes
to CoG (center of gravity) and v
x
is the actual longi-
tudinal velocity. The lateral position of the vehicle is
given by y, whilst δ is the road wheel angle.
Finally, the continuous state-space representation
transformed into a discrete one:
x
v
(k + 1) = Φ
v
x
v
(k) + Γ
v
u
v
(k), (12a)
y
v
(k) = c
T
v
x
v
(k), (12b)
An Observer Design Method Using Ultra-Local Model for Autonomous Vehicles
43

3.2 Selection of Derivative Order and
Computation of the Reference
Signal
The goal of the observer design is to estimate the
lateral velocity (v
y
). Since the first derivative of the
lateral velocity is the lateral acceleration, which is a
directly measurable signal, ν is set to ν = 1. Note
that the measured lateral acceleration (a
y
) has an ad-
ditional component therefore it is computed as ˙v
y
=
a
y
− v
x
˙
ψ. The reference signals (u
nom,re f
, y
ν
re f
) can
be computed using a model predictive approach as
detailed in (F
´
enyes et al., 2022). Note that during the
simulation/measurements, the vehicle is controlled by
a simple PD controller. PD controller does not use
the lateral velocity (v
y
), therefore it does not interfere
with the proposed observer method.
3.3 Tuning the Parameter α
In the literature, there is no elaborate method to de-
termine the optimal value of α. The determination of
the tuning value is solved using an iterative algorithm.
As pointed out by (Polack et al., 2019), when α → ∞,
the effect of the ultra-local model decreases and, in
contrast, when α → 0, the ultra-local model becomes
the major factor of the system. The computational
process is based on a previously saved dataset, which
contains the estimated ˆv
y
and also the accurate value
of the lateral velocity. In order to reach high-level
performance not a constant α is used but it depends
on the longitudinal velocity v
x
, which is highly corre-
lated to the nonlinear behavior of the vehicle. There-
fore, the measured dataset Ω is sorted into subsets.
Let A
i
∈ R
nx5
, A
i
= {v
y,i
,v
y,i
,
˙
ψ
i
,δ
i
,a
y,i
} denote a
measurement set, which includes the measured sig-
nals at a specific time step. The whole dataset consists
of these measurement sets: A
i
∈ Ω ∀i ∈ N
+
. Then,
the dataset is divided into subsets {ω
1
,ω
2
...ω
n
} ⊆ Ω.
A subset is determined by a specific range of longitu-
dinal velocity A
i
∈ ω
j
{v
x,i
|v
x,min, j
< v
x,i
< v
x,max, j
}
where v
x,min, j
and v
x,max, j
are the lower and upper
bounds of j
th
subset.
The following optimization process must be per-
formed for each subset to get a set of α(v
x
):
min
α
j
n
∑
i=1
(v
y,i
− ˆv
y,i
)
2
, v
y,i
∈ ω
j
(13)
where j is the index of the subsets and n is the
number of elements in j
th
subset. ˆv
y,i
is computed
from the elements of A
i
.
The main steps of the iterative algorithm, which
must be performed for each subset, are the following:
1. Design a nominal observer using the nominal
model.
2. Set the value of α to a high value.
3. Using the nominal observer and the actual value
of α, evaluate the algorithm for a predefined test
scenario.
4. Compute the value of the error between the refer-
ence value and the output of the system e
n
, where
n denotes the n
th
iteration step.
5. If e
n
≥ e
n−1
or n > N
max
, quit the iteration.
6. Decrease the value of α then jump to Step 3.
3.4 LQ Observer Design
The goal of the observer design to minimize the error
between the estimated and the measured lateral veloc-
ities:
e = x − ˆx, |e| → min! (14)
This performance can be guaranteed by appropriately
chosen weighting matrices. In case of lateral ve-
locity estimation, the matrices are chosen to Q =
diag(1000,10), R = 1.
4 VALIDATION OF THE
ALGORITHM
In this section, simulation results are presented to
show the efficiency and the operation of the proposed
observer design approach. Moreover, at the end of
this section, an additional example is presented based
on a real measurement dataset. The whole algo-
rithm has been implemented in MATLAB/Simulink
and CarSim environment. During the simulations, a
B-class passenger car is used, whose nominal param-
eter can found in Table 1. Note that, the longitudinal
velocity (v
x
) is fixed to v
x
= 10m/s during the linear
quadratic observer design.
Table 1: Parameters of the test vehicle.
m 1223 (kg)
l
f
,lr 1.083, 1.257 (m)
I
z
2330 (kgm
2
)
C
f
,C
r
123000, 110000 (N/rad)
v
x
10 (m/s)
In the followings, three simulations example are
presented. In the first simulation, the vehicle is driven
along a track with varying longitudinal velocity and
two observer algorithms are used to estimate the lat-
eral velocity: the proposed method and the nominal
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
44
LQ observer. In the second simulation, the friction
coefficient of the tire-ground contact is decreased to
µ = 0.5, which aims to show the operation of the pro-
posed observer method under extraordinary circum-
stances. In the last simulation, the type of the vehicle
is changed, which means that the nominal model sig-
nificantly differs from the real vehicle.
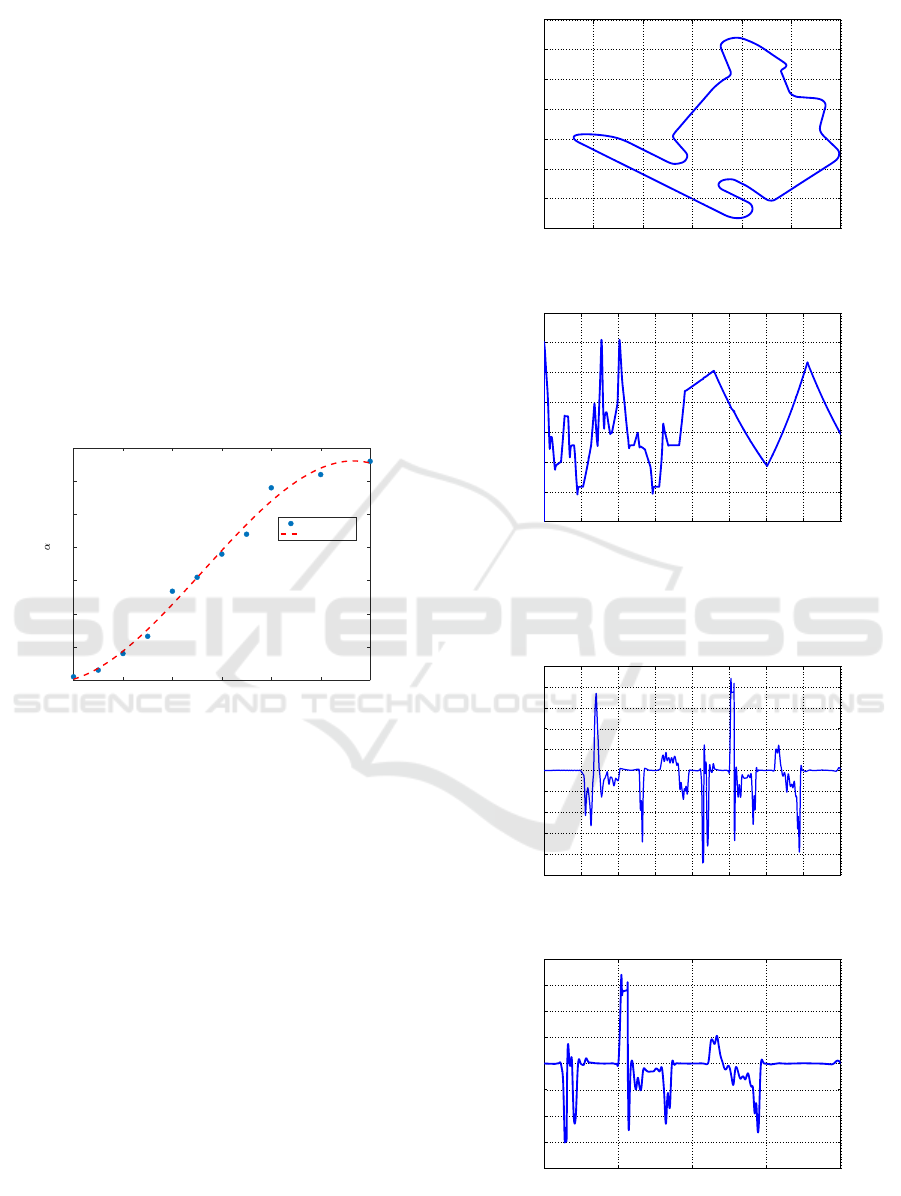
4.1 Results of Tuning α
The presented tuning algorithm is performed on a
set of previous simulation from the simulation soft-
ware, CarSim. The test scenarios include lane change
maneuvers with v
x
= {1 − 120}km/h, and sinusoidal
steering signals. The resulted α values for each sub-
set can be found in Figure 2. It has a progressive part
between v
x
= {1 − 80}km/h and it reaches a constant
value around v
x
= 120km/h.
0 20 40 60 80 100 120
v
x
(km/h)
0
50
100
150
200
250
300
350
Paramter (-)
Data points
fitted curve
Figure 2: Parameter α.
4.2 Comparison of the Observers Under
Standard Circumstances
In the first simulation, the vehicle is driven along F1
track of Hungary, shown in Figure 3. The track con-
tains several sharp bends, where the lateral velocity
can reach a high value. Furthermore, the longitudinal
velocity of the vehicle varies as illustrated in Figure
4. The velocity profile consists of two main parts:
the first one is the rapid changing part t = {0 − 200}s
and a slow changing part t = {200 − 400s}s in or-
der to cover the whole operating range of the vehicle.
Moreover, the measured signals (a
y
,
˙
ψ) are corrupted
with white noises, whose variances: σ
2
a
y
= 0.04 and
σ
2
˙
ψ
= 0.01.
Figure 5 shows the lateral acceleration of the vehi-
cle during the test scenario. It can be seen, that max-
imum of a
y
is around 8m/s
2
, which is close to the
physical limit of the vehicle. In figure 6 similar phe-
nomenon can be observed, the maximum of yaw-rate
is about 0.6rad/s. In summary, it can be concluded,
−600 −400 −200 0 200 400 600
−200
0
200
400
600
800
1000
1200
Coordiante X (m)
Coordinate Y (m)
Figure 3: Test track.
0 50 100 150 200 250 300 350 400
6
8
10
12
14
16
18
20
Time (s)
Longitudinal velocity (m/s)
Figure 4: Longitudinal velocity of the vehicle.
that the simulations cover the whole operating range
of the vehicle.
0 50 100 150 200 250 300 350 400
−10
−8
−6
−4
−2
0
2
4
6
8
10
Time (s)
Lateral acceleration (m/s
2
)
Figure 5: Lateral acceleration of the vehicle.
200 250 300 350 400
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Time (s)
Yaw−rate (rad/s)
Figure 6: Yaw-rate of the vehicle.
An Observer Design Method Using Ultra-Local Model for Autonomous Vehicles
45
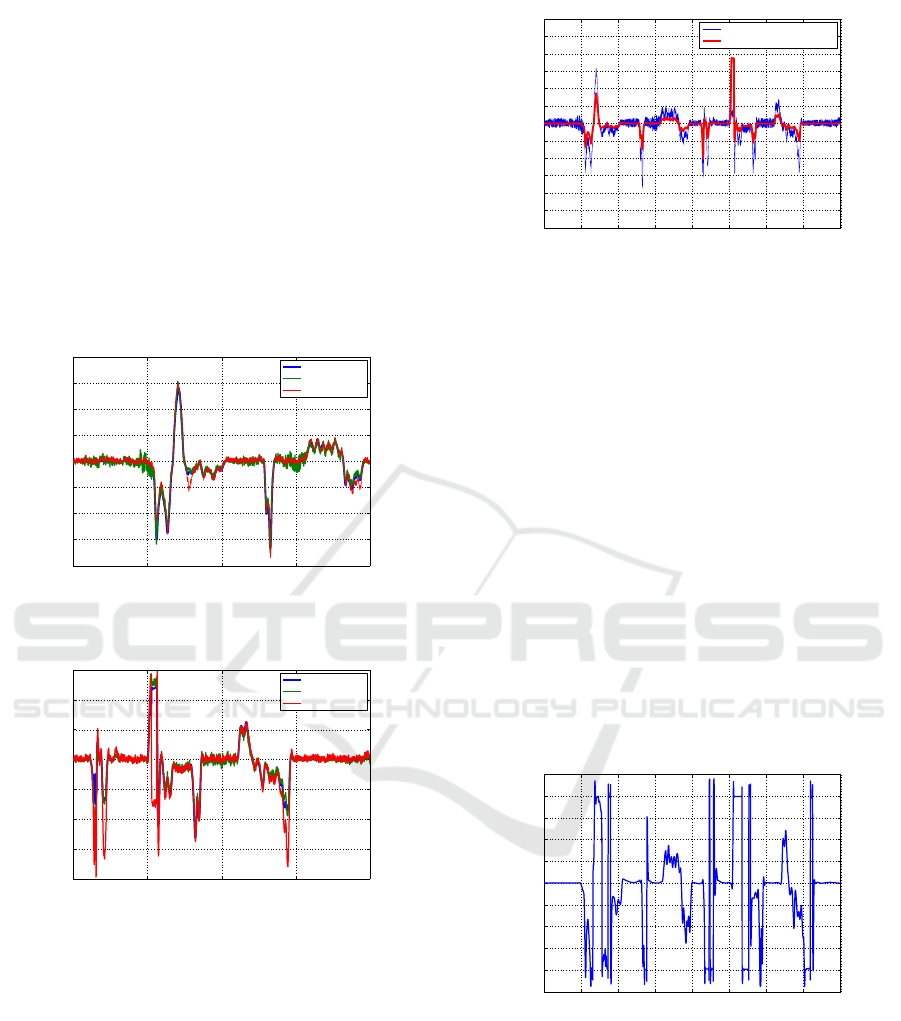
The estimated and the measured lateral velocities
are depicted in Figures 7,8. Note that, this signal
is shown without the applied sensor noises. In the
first section of the simulation, both observers provide
good results, however in the second half, the nominal
LQ observer has a significant error. At that section,
the longitudinal velocity exceeds the nominal value
(v
x
= 10m/s) for a long period of time, therefore the
LQ observer cannot provide good result. However,
it can be seen, when the velocity close to the nom-
inal value (t = 300s) the observer provides accurate
results. In contrast, the combined observer algorithm
estimate the lateral velocity in the whole simulation
with low error.
0 50 100 150 200
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Time (s)
Lateral velocity (m/s)
LQ+UL Model
CarSim
Original LQ
Figure 7: Estimated and measured lateral velocities t = {0−
200}s.
200 250 300 350 400
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
Time (s)
Lateral velocity (m/s)
LQ+UL Model
CarSim
Original LQ
Figure 8: Estimated and measured lateral velocities t = {0−
200}s.
The last figure demonstrates the control inputs
of the observer. The blue line illustrates the com-
puted error-based ultra-local model (∆
nom
) while the
red line is the steering angle provided by the simula-
tion software. In general, the ultra-local model has a
higher amplitude, which aims to compensate for the
unknown and unmodeled part of the system.
0 50 100 150 200 250 300 350 400
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Time (s)
Control inputs (rad)
UL Model
Steering angle by CarSim
Figure 9: Inputs of the observers.
4.3 Simulation with Low Adhesion
Coefficient
In the second simulation, the adhesion coefficient be-
tween the tire and ground changed to µ = 0.5. This
demonstrates a case when the vehicle travels on the
snowy ground. Figure 10 shows the lateral acceler-
ation during this test scenario. The maximum value
of a
y
decreases to a
y
= 4m/s
2
, which is caused by
the low µ surface. It can also be seen, that the vehi-
cle reaches that value several times during the simu-
lation, which means that the vehicle loses its motion
stability. The nominal, linear observer cannot cope
with this motion as illustrated in Figures 11,12. In
other cases, the observer still provides acceptable re-
sults. The combined observer, however, can deal with
this nonlinear dynamics of the vehicle, and its result
matches with the measured lateral velocity as shown
in Figures 11,12.
0 50 100 150 200 250 300 350 400
−5
−4
−3
−2
−1
0
1
2
3
4
5
Time (s)
Lateral acceleration (m/s
2
)
Figure 10: Lateral acceleration in case of low µ.
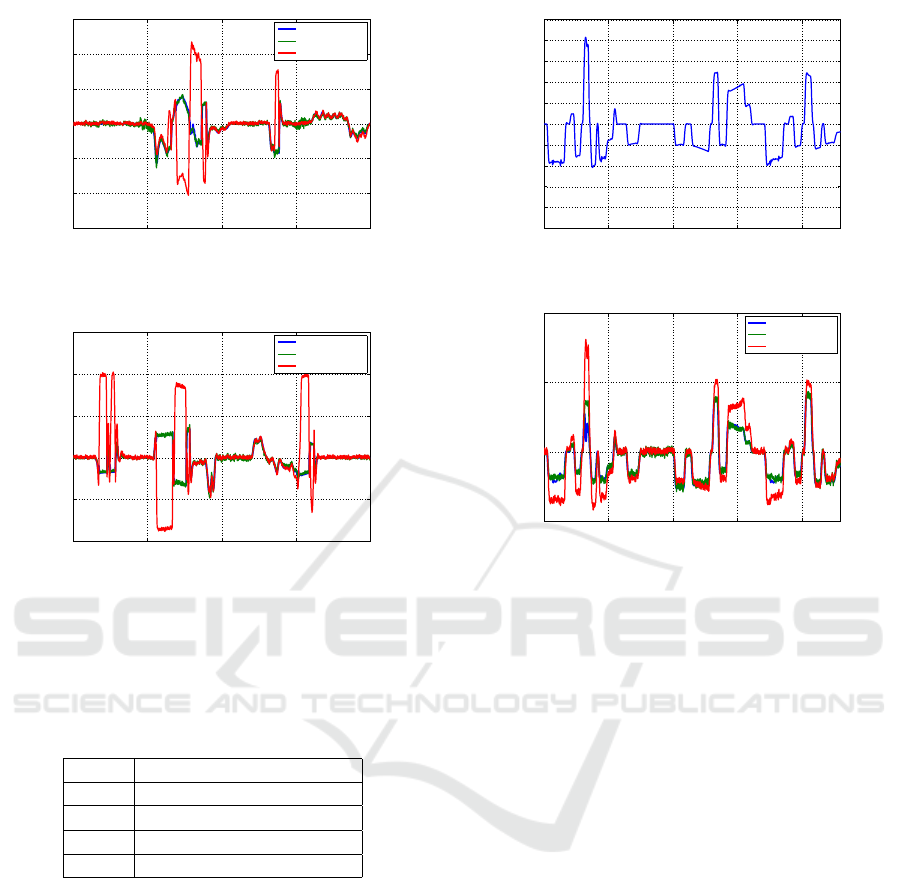
4.4 Simulation Using Different Vehicle
Parameters
In the last test scenario, a case is investigated, when
the designed observer is applied to a completely dif-
ferent vehicle. The goal of this simulation is to show
the robustness of the proposed observer method. The
selected vehicle is a D-class passenger car, whose pa-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
46
0 50 100 150 200
−1.5
−1
−0.5
0
0.5
1
1.5
Time (s)
Lateral velocity (m/s)
LQ + UL Model
CarSim
Original LQ
Figure 11: Estimated and measured lateral velocities t =
{0 − 200}s.
200 250 300 350 400
−1
−0.5
0
0.5
1
1.5
Time (s)
Lateral velocity (m/s)
LQ + UL Model
CarSim
Original LQ
Figure 12: Estimated and measured lateral velocities t =
{200 − 400}s.
rameters can be found in Table 2. The track of the
vehicle is also changed to Michigan Waterford race-
track.
Table 2: Parameters of D-class car.
m 2013 (kg)
l
f
,lr 1.24, 1.68 (m)
I
z
4230 (kgm
2
)
C
f
,C
r
230000, 180000 (N/rad)
v
x
10 (m/s)
The lateral velocity of the vehicle is depicted in
Figure 13. In this case, the maximum value of a
y
is
about 8m/s
2
, which indicates that the vehicle reaches
its psychical limits in this scenario similarly to the
previous test scenarios.
The estimated and the measured lateral velocities
can be seen in Figure 14. As it can be seen, the
nominal observer estimates the lateral velocity with
a large error since the model parameters significantly
differ from the real ones. However, the proposed ob-
server still works well despite a short section between
t = {30 − 35}s. Note that the tuning parameter α has
also not been retuned for this vehicle, which can be
the reason behind this phenomenon.
0 50 100 150 200
−10
−8
−6
−4
−2
0
2
4
6
8
10
Time (s)
Lateral acceleration (m/s
2
)
Figure 13: Lateral acceleration in case of D-class car.
0 50 100 150 200
−0.5
0
0.5
1
Time (s)
Lateral velocity (m/s)
LQ + UL Model
Reference
Original LQ
Figure 14: Estimated and measured lateral velocities in case
of D-class car.
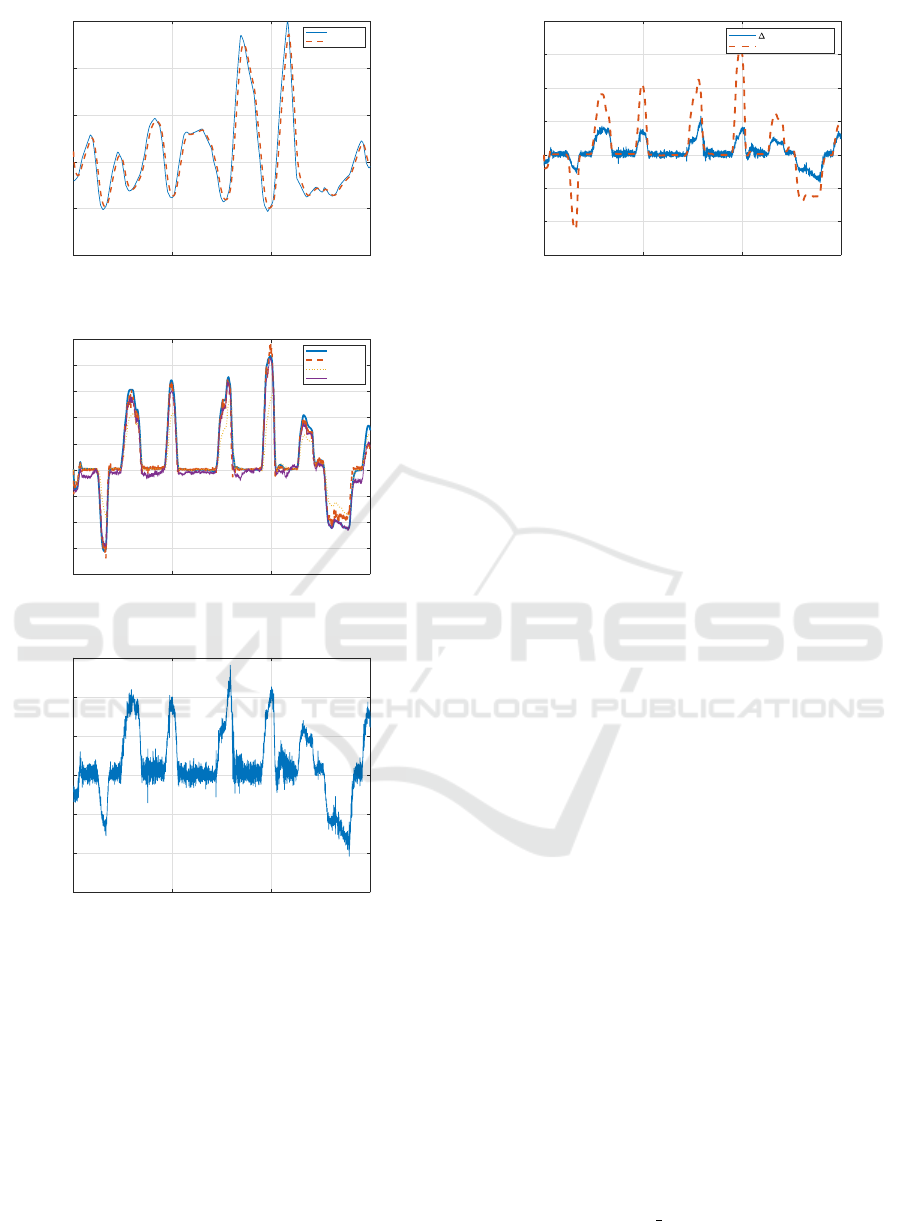
4.5 Example Using Real-Test
Measurements
To validate the performance of the proposed observer
algorithm, a 2km long test scenario has been per-
formed on the test ground using a Lexus RX450h test
vehicle. CarSim model is used to compare the results
of the observer and the measured data. This scenario
includes several bends, varying longitudinal velocity
with high acceleration and deceleration profile. Fig-
ure 15 illustrates the longitudinal velocity of the vehi-
cle during the test. Its maximal value is about 25m/s
while the lowest value is 5m/s. Thus, the perfor-
mance of the observer can be tested in a wide range of
the vehicle dynamics. Figure 16 shows the measured
and the estimated lateral velocities. As the figure il-
lustrates, LQ-based observer provides poor results at
low and high longitudinal velocities. Whilst, the pro-
posed observer and CarSim’s model covers the mea-
sured lateral velocity well. The maximum of the error
is about 0.04m/s between 140 − 150s. In other cases,
the error is smaller than 0.02m/s.
Figure 17 demonstrates the lateral acceleration
during the test. The maximum of a
y
is almost 6m/s
2
,
which is high value for a SUV car. However, it does
not influence the accuracy of the estimation.
Figure 18 shows the two input signals: steering
angle and the output of the error-based ultra-local
An Observer Design Method Using Ultra-Local Model for Autonomous Vehicles
47
0 50 100 150
Time (s)
0
5
10
15
20
25
Longitudinal Velocity (m/s)
Measured
CarSim
Figure 15: Longitudinal velocities of the vehicle.
0 50 100 150
Time (s)
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Lateral velocity (m/s)
CarSim
Proposed
LQ-based
Measured
Figure 16: Lateral velocities of the vehicle.
0 50 100 150
Time (s)
-6
-4
-2
0
2
4
6
Lateral acceleration (m/s
2
)
Figure 17: Lateral acceleration.
model. In this case, CarSim provides slightly worse
results compared to the previous test. The maxi-
mal deviation appears at low longitudinal velocity for
instance: 90 − 100s. The reason behind this phe-
nomenon could be that CarSim’s dynamical model is
fitted for higher longitudinal velocities. In the reason-
able operating range, it fits well the measurements.
0 50 100 150
Time (s)
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Inputs of the observer
F (-)
Steering angle (rad)
Figure 18: Control inputs.
5 CONCLUSION AND FUTURE
PLANS
In this paper, a novel combined observer design
method has been proposed using the linear quadratic
and the ultra-local model approaches. The LQ ob-
server was designed on a nominal model, which was
not expected to be accurate. The ultra-local model-
based part was able to approximate the unmodeled
dynamics of the system and to eliminate its effect,
which resulted in a more accurate estimation of the
observed state. The proposed observer design algo-
rithm has been implemented to a vehicle-oriented es-
timation problem: lateral velocity. The effectiveness
and the operation of the presented algorithm have
been demonstrated through simulation examples us-
ing CarSim and a real test measurement. The future
research directions include the investigation of co-
design with the Model-Free Controller and the analy-
sis of the closed-loop system.
ACKNOWLEDGEMENTS
The paper was funded by the National Research, De-
velopment and Innovation Office under OTKA Grant
Agreement No. K 143599. The work of Daniel
Fenyes was supported by the Janos Bolyai Research
Scholarship of the Hungarian Academy of Sciences.
The research was partially supported by the European
Union within the framework of the National Labo-
ratoryfor Autonomous Systems (RRF-2.3.1-21-2022-
00002). The research was also supported by the Na-
tional Research, Development and Innovation Office
through the project ”Cooperative emergency trajec-
tory design for connected autonomous vehicles” (NK-
FIH: 2019-2.1.12-T
´
ET VN).
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
48

REFERENCES
Al Younes, Y., Noura, H., Muflehi, M., Rabhi, A., and
El Hajjaji, A. (2015). Model-free observer for state es-
timation applied to a quadrotor. In 2015 International
Conference on Unmanned Aircraft Systems (ICUAS),
pages 1378–1384.
Breschi, V., Formentin, S., Rallo, G., Corno, M., and
Savaresi, S. M. (2020). Vehicle sideslip estimation
via kernel-based lpv identification: Theory and exper-
iments. Automatica, 122:109237.
Chu, L., Shi, Y., Zhang, Y., Liu, H., and Xu, M. (2010).
Vehicle lateral and longitudinal velocity estimation
based on adaptive kalman filter. In 2010 3rd Inter-
national Conference on Advanced Computer Theory
and Engineering(ICACTE), volume 3, pages V3–325–
V3–329.
Du, X., Sun, H., Qian, K., Li, Y., and Lu, L. (2010). A
prediction model for vehicle sideslip angle based on
neural network. In 2010 2nd IEEE International Con-
ference on Information and Financial Engineering,
pages 451–455.
F
´
enyes, D., Heged
˝
us, T., N
´
emeth, B., Szabo, Z., and
G
´
asp
´
ar, P. (2022). Robust control design using ultra-
local model-based approach for vehicle-oriented con-
trol problems. In 2022 European Control Conference
(ECC), pages 1746–1751.
Fenyes, D., Hegedus, T., Nemeth, B., Szabo, Z., and Gas-
par, P. (2022). Combined lpv and ultra-local model-
based control design approach for autonomous vehi-
cles. In 2022 IEEE 61st Conference on Decision and
Control (CDC), pages 3303–3308.
Fenyes, D., Nemeth, B., Asszonyi, M., and Gaspar, P.
(2018). Side-slip angle estimation of autonomous road
vehicles based on big data analysis. In 26th Mediter-
ranean Conference on Control and Automation, pages
849–854.
Fliess, M. and Join, C. (2013). Model-free control. Inter-
national Journal of Control, 86(12):2228–2252.
Heged
˝
us, T., F
´
enyes, D., N
´
emeth, B., Szab
´
o, Z., and
G
´
asp
´
ar, P. (2022). Design of model free control with
tuning method on ultra-local model for lateral vehicle
control purposes. pages 4101–4106.
Huang, Y., Bao, C., Wu, J., and Ma, Y. (2017). Estimation
of sideslip angle based on extended kalman filter. In
Journal of Electrical and Computer Engineering.
Kang, C. M. and Kim, W. (2020). Linear parameter vary-
ing observer for lane estimation using cylinder domain
in vehicles. IEEE Transactions on Intelligent Trans-
portation Systems, pages 1–10.
Kang, C. M., Lee, S.-H., and Chung, C. C. (2018). Discrete-
time lpv h
2
observer with nonlinear bounded varying
parameter and its application to the vehicle state ob-
server. IEEE Transactions on Industrial Electronics,
65(11):8768–8777.
Polack, P., Delprat, S., and d
´
Andr
´
ea Novel, B. (2019).
Brake and velocity model-free control on an actual ve-
hicle. Control Engineering Practice, 92:104072.
Rajamani, R. (2005). Vehicle dynamics and control.
Springer.
Zhang, B., Zhao, W., Zou, S., Zhang, H., and Luan, Z.
(2021). A reliable vehicle lateral velocity estimation
methodology based on sbi-lstm during gps-outage.
IEEE Sensors Journal, 21(14):15485–15495.
An Observer Design Method Using Ultra-Local Model for Autonomous Vehicles
49
