
Simultaneous Planning of the Path and Supports of a Walking Robot
Paula Mollá-Santamaría
1a
, Adrián Peidró
1b
, Arturo Gil
1c
, Óscar Reinoso
1,2 d
and Luis Payá
1e
1
Instituto de Investigación en Ingeniería de Elche (I3E), Universidad Miguel Hernández de Elche,
Avda. de la Universidad s/n, Edificio Innova, 03202 Elche, Alicante, Spain
2
ValgrAI: Valencian Graduate School and Research Network of Artificial Intelligence,
Camí de Vera s/n, Edificio 3Q, 46022 Valencia, Spain
Keywords: Path Planning, Support Planning, Stability, Non-Coplanar Contacts, Walking Robot.
Abstract: In this paper we study the simultaneous planning of the path and leg supports of an eight-legged robot on
uneven terrain. We use the A-star algorithm (A*), which searches for the shortest path between two points.
First, the terrain is modelled with a triangular mesh and the triangles are subdivided to take the centroids of
these triangles as the search space of the A*. Secondly, with respect to the original A*, the stability of the
robot at each centroid is considered, so that the cost at a centroid is penalised if the robot is unstable (i.e., the
robot slips and/or tips over), or the cost is zero if it is stable. The stability at each contact point is determined
by calculating that the ground reaction at that point is contained in a linear approximation of the friction cone.
Finally, the path, the contact points of each leg, as well as the robot's posture at each position are obtained.
1 INTRODUCTION
This paper presents a solution for the path planning of
an eight-legged modular robot in rough natural
terrains consisting of different slopes. We determine
the sequence of positions and orientations that the
robot must visit in order to move from an initial point
to a final point of the terrain, including the supports
or footholds where the robot must place all feet for
each position of the path, to guarantee stability, i.e.,
to prevent slipping and tipping over.
For legged robots moving on horizontal planes
with sufficient friction to prevent slippage, one of the
most extended stability tests is based on the Zero
Moment Point (ZMP) (Vukobratović and Borovac,
2004), which is the point respect to which contact
moments have no horizontal components. If the ZMP
belongs to the convex hull of the support points, the
robot will not tip over.
For robots with legs supported on different planes,
or when the ground cannot offer sufficient friction to
neglect slippage, the ZMP test is insufficient and the
a
https://orcid.org/0009-0003-5447-0278
b
https://orcid.org/0000-0002-4565-496X
c
https://orcid.org/0000-0001-7811-8955
d
https://orcid.org/0000-0002-1065-8944
e
https://orcid.org/0000-0002-3045-4316
Contact Wrench Cone (CWC) (Hirukawa et al., 2006)
should be studied instead. The CWC is based on the
idea that, for each point of contact of the robot with
the ground, there is a reaction force from the ground
that should be inside a friction cone whose axis is
normal to the ground and whose aperture depends on
the coefficient of friction. For computational
efficiency, such friction cones are approximated by
inscribed pyramids. The vectors 𝐟
along the lateral
edges of these pyramids, together with their moments,
constitute a set of 6-dimensional wrenches that,
counted for all contact points of the robot, span the 6-
dimensional Contact Wrench Cone. If the net wrench
acting on the robot due to inertia, gravity and external
forces (excluding reactions from the ground) belongs
to the CWC, the robot will not tip over or slip.
The CWC has been widely used to plan the
dynamically stable locomotion of legged robots, both
bipedal humanoids (Dai y Tedrake, 2016; Navaneeth,
Sudheer, and Joy, 2022) and quadrupedal (Aceituno-
Cabezas et al., 2017). Most papers depart from a
precomputed set of footholds along the terrain, at
648
Mollá-Santamaría, P., Peidró, A., Gil, A., Reinoso, Ó. and Payá, L.
Simultaneous Planning of the Path and Supports of a Walking Robot.
DOI: 10.5220/0012184600003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 648-656
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
which the robot should support its legs during the
trajectory, and then they focus on solving the
trajectory of the center of mass to guarantee that
gravito-inertial wrenches are in the CWC within some
margin, while minimizing centroidal angular
momentum. Recent papers such as (Aceituno-
Cabezas et al., 2018) or (Jenelten, Grandia,
Farshidian, and Hutter, 2022) do not assume a
precomputed set of footholds, which are planned at
the same time that the global locomotion of the robot,
solving mixed-integer convex optimization problems
or using graduated optimization techniques. The
simultaneous planning of the path of the robot and of
the footholds yields more optimal and natural
solutions. Other remarkable works that use the CWC
are (Orsolino et al., 2018), where the CWC is
intersected with a polytope that considers limits on
actuation torques, or Ellenberg and Oh (2014), who
use the CWC to analyze the stability of humanoids
climbing ladders, taking into account limits on the
contact wrenches that the environment can provide.
Typically, the stability test based on the CWC is
computationally demanding, considering that it
requires many operations to first build a polytope that
is the convex hull of dozens of 6-dimensional contact
wrenches, and then check if the gravito-inertial
wrenches acting on the robot belong to this polytope.
Some papers have tried to reduce the cost of these
operations to check stability while controlling the
robot in real time. Li et al. (2022) present a simplified
test that approximates the contact polygon by an
effective segment, sacrificing accuracy for efficiency.
Caro and Kheddar (2016) change checking the 6D
polytope for checking if the centroidal acceleration
belongs to a 3D volume. Finally, Caron, Pham and
Nakamura (2017) project the CWC on a 2D polygon
to which the ZMP should belong to guarantee
stability, generalizing the notion of ZMP to situations
with insufficient friction or non-coplanary contacts.
In this paper, we present a solution for the
simultaneous planning of the path and supports of a
modular eight-legged robot described in Section 2,
which should explore natural terrains consisting of
planes with different orientations where slippage
cannot be neglected. First, in Section 3, we describe
the modeling of the terrain, which is approximated by
a triangular mesh. Next, in Section 4, we present the
stabilty test, which avoids building the 6-dimensional
CWC and instead solves iteratively a quadratic and
underdetermined system of equations using the
Newton-Raphson method, performing the stability
test roughly 10 times faster than by building the
CWC. Section 5 proposes our algorithm to
simultaneously plan the path and supports of the
legged robot, which is based on the A-star (A*)
algorithm, but incorporating instability as a penalty to
the cost function (among other sub-costs). Then,
Section 6 illustrates the developed algorithm by
means of examples. These examples demonstrate the
feasibility of the paths planned by the proposed
algorithm, comparing the results obtained when
considering stability or when ignoring it (in which
case, the robot would fall down steep inclines).
Finally, Section 7 summarizes the conclusions and
suggests future lines of research, which will be
mainly directed towards speeding up the proposed
method, so that it can be used in real time.
2 ROBOT DESCRIPTION
This section describes the modular walking robot
whose optimal path is planned in this paper, from an
initial to a final position in a rugged natural
environment, also determining the contact points on
the ground.
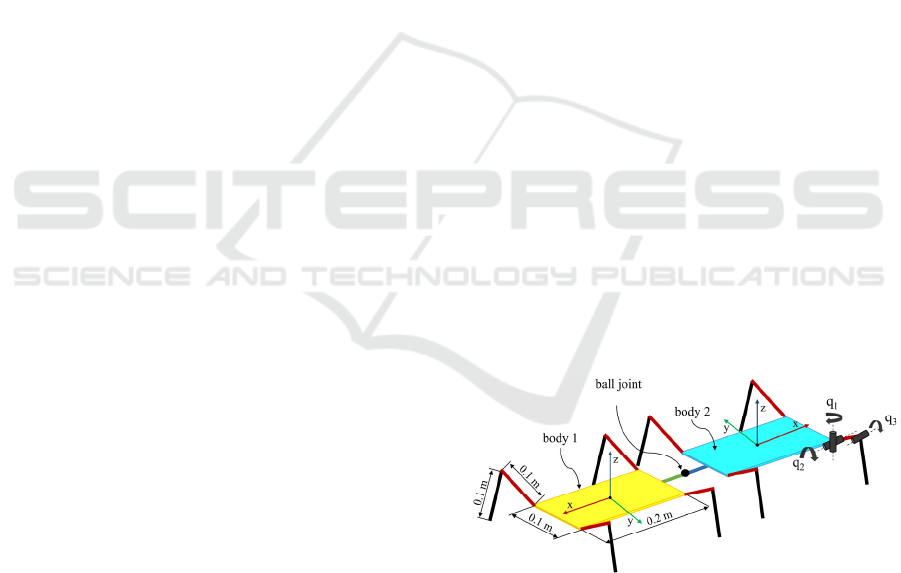
The robot presented in Figure 1 consists of two
identical modules connected by a spherical or ball
joint. The modules have a central body that can move
and orient itself in the x, y, and z axes and four legs
with three degrees of freedom each (q
1
, q
2
, q
3
) that
allow it to move efficiently, where q
1
provides the
forward and backward movement of the leg, q
2
allows
the raising and lowering of the leg, and q
3
facilitates
the bending or stretching of the leg. Each module of
the robot has eighteen degrees of freedom, giving it
great freedom of movement for moving over rough
terrain.
Figure 1: Wireframe representation of the studied modular
legged robot.
3 TERRAIN MODELLING AND
SUBDIVISION
The planning of the robot's path and the determination
of the points of contact with the environment are the
objectives of this article. To this purpose, this section
Simultaneous Planning of the Path and Supports of a Walking Robot
649
describes the modelling and pre-processing of the
terrain on which the robot moves, considering that all
the robot's feet will be resting on the ground at each
position of the planned path.
The modelled terrain consists of several ramps
with different inclinations surrounding the
environment, requiring the robot to climb three ramps
to reach the highest point. It is important to note that
the initial terrain is defined by a triangular mesh in
STL format. To achieve this, we first used 3D design
software, specifically Autodesk Inventor, to create
the CAD model of the terrain. Then, we exported the
model in STL format, as this format is capable of
representing solid objects by approximating their
surface with triangles in a graphical manner. In real
scenarios, a point cloud of the environment may be
obtained using range sensors, and this point cloud
may be used as the starting point to model the terrain
in a similar way as described in this paper.
To undertake the planning of the robot's path, it is
necessary to start with a point cloud to identify the
nodes or points that will be part of the optimal path
from the initial to the final position. Since the terrain
is composed of triangles, the centroids of these
triangles are used as search points for the path. In
order to obtain a denser mesh of nodes and to achieve
a more accurate and realistic planning, a recursive
subdivision of the terrain is performed, dividing the
triangles into smaller ones. This subdivision process
continues until each triangle is circumscribed within
a circle of radius less than 0.2 m.
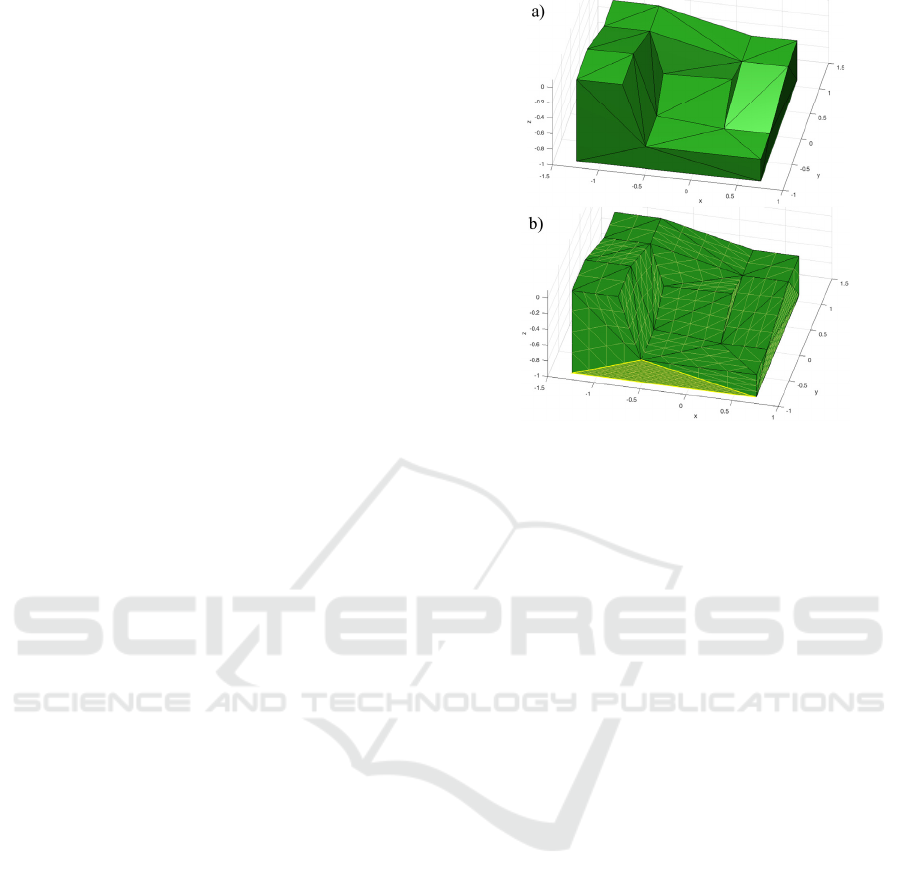
The subdivision method implemented consists in
dividing each triangle by connecting the centres of its
sides, which generates four new triangles. However,
this method requires multiple subdivisions to get the
most elongated or flattened triangles to be
circumscribed within a circle of radius R, as shown in
Figure 2b. In our case, the flattened triangles are in an
area of the terrain that the robot will not traverse,
therefore, this does not affect the path planning.
However, to obtain a more equiaxial subdivision of
the triangles which form the terrain, an alternative
method could be considered. This procedure would
consist in dividing the longest side of the triangle into
N segments, using a value of 10 for N, and then
joining these segments with the opposite vertex.
Figure 2 below illustrates both the original terrain
and the subdivided terrain.
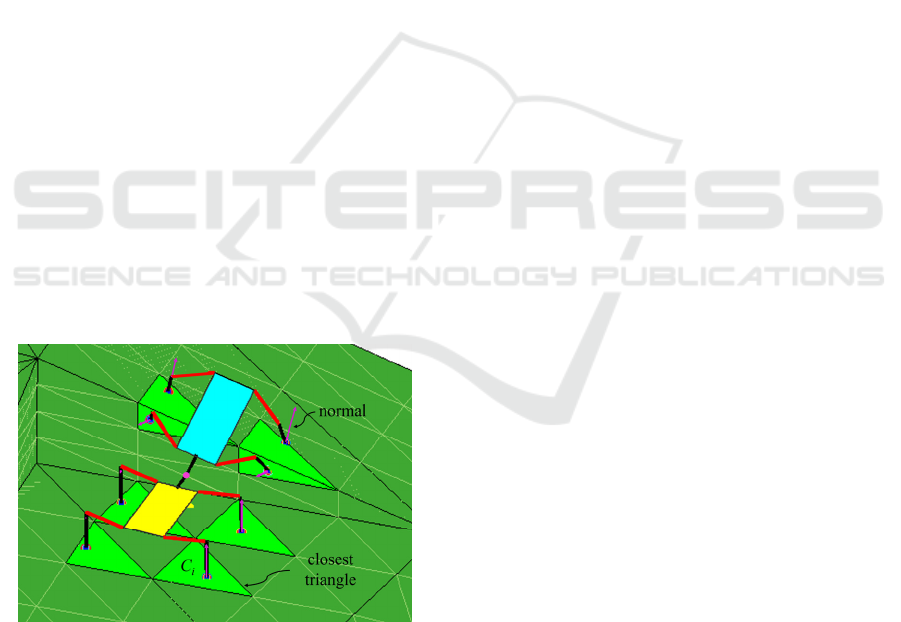
One of the objectives of the article is to identify
the location of the robot's footholds on the subdivided
terrain. To achieve this, the triangle of the terrain
closest to each foot of the robot is found and a
projection of the foot onto this triangle is made. This
process is repeated for each of the robot's legs.
Figure 2: a) Original terrain. b) Subdivided terrain.
Initially, a brute force search was used to find the
closest triangle by checking all triangles in the
environment. However, this approach proved
computationally expensive. To improve the search
process, we decide to examine only triangles that are
within a short distance of the robot's shoulder. To do
this, a k-d tree is created using the centroids of the
subdivided triangles that make up the terrain.
Through this k-d tree, the centroids that lie within a
sphere centred at the shoulder of the leg, with a radius
of r*1.5, are determined. In this case, r has a value of
0.2, corresponding to the total length of the robot leg
when fully extended.
Once the triangle closest to the foot of each leg
has been identified, the projection of each foot on the
closest triangle is calculated. This ensures that the
robot, in each position, has all its legs correctly
supported on the ground, which makes it possible to
analyse its stability, as described in the next section.
4 STABILITY ANALYSIS
Stability plays a crucial role in the robot's path
planning, since if it moves along an unstable path, it
could face tipping or slipping situations,
compromising both its safety and accuracy in task
execution.
In order to guarantee the stability of the robot, it
is essential to carry out an analysis of the support
points. The Zero Moment Point (ZMP) is the point at
which the reaction forces produced at the robot's
contacts with the ground do not generate any moment
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
650
in the horizontal direction. In planar horizontal
grounds with sufficient friction, the ZMP must be
within the convex hull of the robot's contact points
with the ground for the robot to be in a stable position.
However, this analysis becomes more complex for
robots with multiple non-coplanar contacts, or when
friction is not sufficiently high to neglect slippage. In
this context, Hirukawa et al. (2006) proposed a more
general stability criterion based on the Contact
Wrench Cone (CWC), which addresses this issue by
considering the friction constraints between the
contact points and the ground.
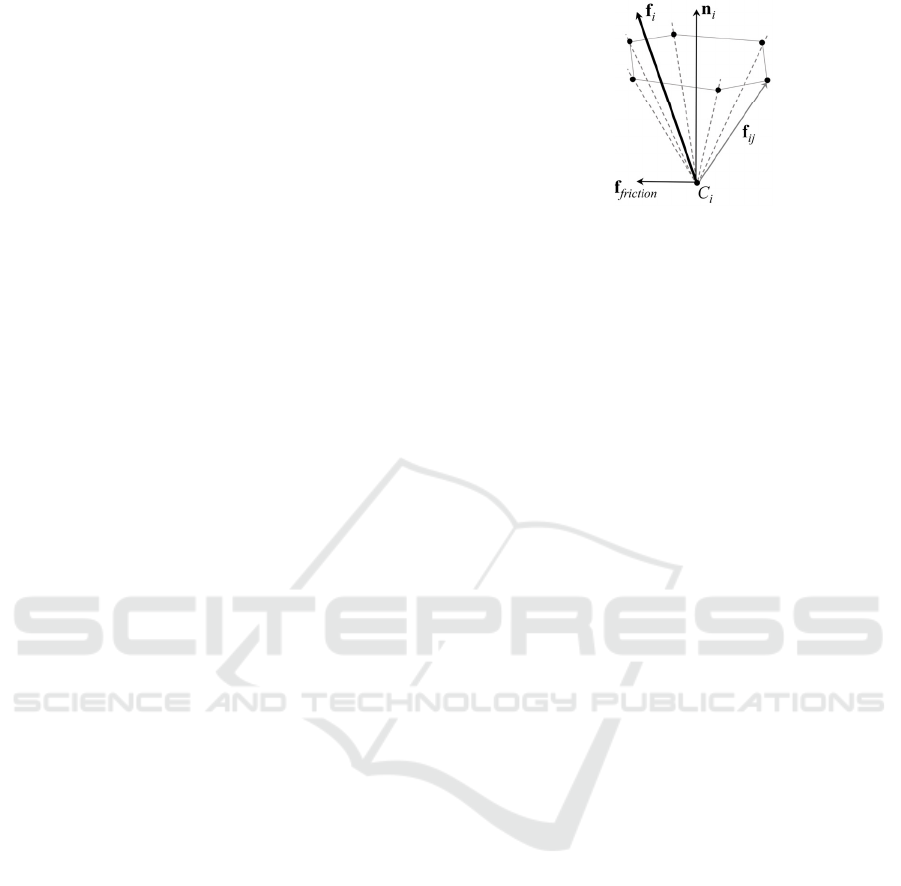
In this method, the stability of a contact point C
i
is evaluated by the contact force f
i
, which is the vector
sum of the normal reaction along the normal n
i
at the
contact point, and the friction force tangent to the
ground, f
friction
. For a contact point to be considered
stable, the contact force is required to be within the
friction cone, defined as:
‖𝐧
𝐟
𝐧
‖
𝜇
𝐟
𝐧
(1)
where 𝜇
is the coefficient of friction.
In numerous articles, such as (Caron et al. 2017),
a linear approximation of the friction cone is used due
to its better computational efficiency in terms of
computational speed and processing. This
approximation consists in approximating the cone by
an inner pyramid whose lateral edges are denoted by
f
ij
, as shown in Figure 3. To ensure the stability of the
robot, condition (2) must be fulfilled, which involves
the f
ij
vectors and their moments, considering the
position of C
i
in relation to the global coordinate
system, defined as p
Ci
.
𝐟
𝛕
𝜆
𝐟
𝐩
𝐟
𝜆
0
(2)
where the subscript i iterates over the contact points
(i = 1 … 8 for the legged robot described in Section
2) and j iterates over the edges used in the
approximation of the friction cones by pyramids.
Equation (2) establishes that the resultant of the
external forces 𝐟 and moments 𝛕
(due to gravity,
inertia, etc.) that could cause the robot to tip over or
slip, must be a linear combination of the vectors f
ij
and their moments, multiplied by non-negative
coefficients 𝜆
. This ensures the stability of the robot
by guaranteeing that the f
i
reactions are within the
friction pyramid. In this article, 10 f
ij
vectors have
been used to approximate the friction cone at each
contact point, although for simplicity only 6 edges are
represented in Figure 3.
Figure 3: Stable Contact C
i
.
Typically, the stability test consists in building the
6-dimensional CWC cone represented by the right-
hand side of (2), and checking if the left-hand side of
(2), i.e., the 6-dimensional vector [𝐟 ; 𝛕
], belongs to
this CWC, in which case the robot is stable. However,
building the CWC is a costly operation, and in this
paper we will use a simpler method to check if (2)
admits a solution consisting of non-negative 𝜆
for a
given wrench [𝐟 ; 𝛕
], as explained next.
The stability test employed in this paper begins by
transforming the inequality constraints of (2) into
equivalent equalities, by defining a new auxiliary
variable 𝑡
for each 𝜆
, and then replacing each
inequality 𝜆
0 by its equivalent quadratic
equation:
𝜆
𝑡
(3)
After this, (2) becomes a quadratic system of six
equations with many more than six unknowns 𝜆
and
𝑡
(e.g., if each friction cone is approximated by a 10-
sided pyramid, and having eight contact points, we
have 80 2 unknowns 𝜆
and 𝑡
). This
underdetermined system is solved by the iterative
Newton-Raphson method, using the pseudoinverse of
the Jacobian matrix that gives the least norm solution.
If we make several attempts (e.g., 10) to obtain a
converging solution using the Newton-Raphson
method as explained above, where each attempt starts
from a different random value of 𝜆
and 𝑡
, and all
attempts fail to converge after a reasonable number of
iterations, then we conclude that the robot is unstable,
as it is impossible to find non-negative 𝜆
that satisfy
(2) for the given left-hand side [𝐟 ; 𝛕
]. Otherwise, if
at least one attempt converges to a solution, then we
conclude that the robot is stable.
By running several examples where stability was
tested using the described Newton-Raphson method
or the typical method that requires building the 6-
dimensional CWC, we checked that both methods
always gave the same verdict of stability, but the
Newton-Raphson method performed roughly 10
times faster, and it was easier to implement. This
Simultaneous Planning of the Path and Supports of a Walking Robot
651

higher speed is advantageous if the stability test must
be repeatedly performed many times, as it will be
required in the path-planning algorithm described in
the next Section. Therefore, in the following, we will
test stability using the Newton-Raphson method
described above.
5 PLANNING THE PATH AND
CONTACT POINTS
The aim of this paper is to perform simultaneous
planning of the path and locations of footholds of the
multi-legged robot introduced in Section 2. To
achieve this, we implement the A-star search
algorithm (A*), which searches for the path with the
lowest cost from an initial position to a final position.
We use the A* algorithm to find a sequence of
waypoints of the terrain at which the robot can be
positioned and oriented stably without suffering
tipping over or slipping, with all its eight feet
supported on the terrain. We do not solve, however,
the sequence of movements that the robot needs to
execute to move from one waypoint to the next one,
i.e., lifting and swinging each leg to move the robot
while other legs rest on the terrain. This latter
problem is left for future work.
In our approach, we start from a terrain
subdivided into triangles, whose known centroids
form a grid of points that serves as the search space
for the algorithm. Using these points, a k-d tree is
constructed and used at the beginning of the
algorithm to find the initial and final nodes closest to
the desired initial and final positions provided by the
user or high-level path planner. In addition, while the
algorithm executes the steps described later, the same
k-d tree is also used to find the n nearest neighbour
nodes to the current node, where in this example, n is
equal to 10. The use of k-d trees allows us to make
these searches more efficiently compared to an
exhaustive brute-force search.
In this paper, in order to obtain the optimal route,
the A* algorithm is used to carry out an exploration
along all the centroids (nodes) of the triangles
representing the terrain. A variant of the conventional
A* algorithm is used, where the distances or costs
associated with each node are modified, taking into
consideration both the stability of the robot and the
similarity between the configurations or postures
adopted by the robot between neighbour nodes. The
algorithm implemented in this article can be
summarised in the following steps:
1) The algorithm explores all the nodes that are
part of the terrain map, starting with the initial
node and prioritising the search among those
nodes with the lowest cost
𝑓 (the definition of
cost
𝑓 will be provided later).
2) After that, the 10 nearest neighbour nodes to
the current node are determined (initially, the
current node is the initial node).
3) The costs
𝑓 and 𝑔 are obtained for each of the
neighbouring nodes that have not been
previously evaluated or explored.
𝑔 𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟𝑔𝑐𝑢𝑟𝑟𝑒𝑛𝑡 𝑑 𝑞 𝑒
𝑓
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟𝑔𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 ℎ
(4)
where:
- 𝑔𝑥 represents the real cost of reaching node
“𝑥” from the initial node.
- 𝑓
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟
is an estimate of the total cost of
going to the destination node from the initial node,
passing through the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node. This cost is
calculated using a distance heuristic ℎ that must not
overestimate the actual distance. In this case, for
simplicity, the straight-line distance between the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 and the destination is used as the heuristic
ℎ.
- 𝑑 is the actual distance between the
𝑐𝑢𝑟𝑟𝑒𝑛𝑡
node and the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟.
- 𝑞 represents the difference between the
configurations adopted by the robot when resting at
the
𝑐𝑢𝑟𝑟𝑒𝑛𝑡 node and at the 𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node. The
difference in positions and orientations of the robot's
modules, as well as the joint angles rotated by its legs,
between the posture at the
𝑐𝑢𝑟𝑟𝑒𝑛𝑡 node and at the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node is considered. The objective is to
minimise 𝑞 to try to achieve continuity in the postures
adopted by the robot along the various nodes it travels
during the path.
- 𝑒 is a penalty for lack of stability. By applying
the method described in Section 4, the stability of the
robot when placed on the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node is
evaluated. In situations where instability is identified,
a significantly high value is assigned to
𝑒 as a penalty,
so that the A* algorithm will discard that node as part
of the potential path to the destination node. In
contrast, if the robot is stable,
𝑒 is set to 0.
It is important to consider that 𝑞 and 𝑒 are
dependent on the orientation adopted by the robot
when it is positioned over the
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node. To
tackle this, four orientations separated by 45 degrees
are explored, as it will be explained later. The
orientation that yields the lowest value for the sum of
𝑞 and 𝑒 is selected.
The next subsection details the process of
"building" the robot's posture as it is placed over each
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
652
𝑛𝑒𝑖𝑔ℎ𝑏𝑜𝑢𝑟 node. This is done in order to evaluate all
the previously mentioned costs.
5.1 Building the Posture of the Robot
at Each Node
To calculate the different costs involved in (4), the
robot must be placed at a given position with all eight
feet resting on the ground. This requires defining the
footholds for all feet, the position and orientation of
the central body of each of the two modules that
integrate the robot, and the joint angles of every leg.
This subsection will describe the calculations that
allow us to define a reasonable and feasible posture
of the robot when placed over each node visited by
the A* algorithm. This feasible posture will be
obtained by first building a tentative posture, and later
refining it using Newton-Raphson iterations, to
guarantee that all feet of the robot rest on the ground.
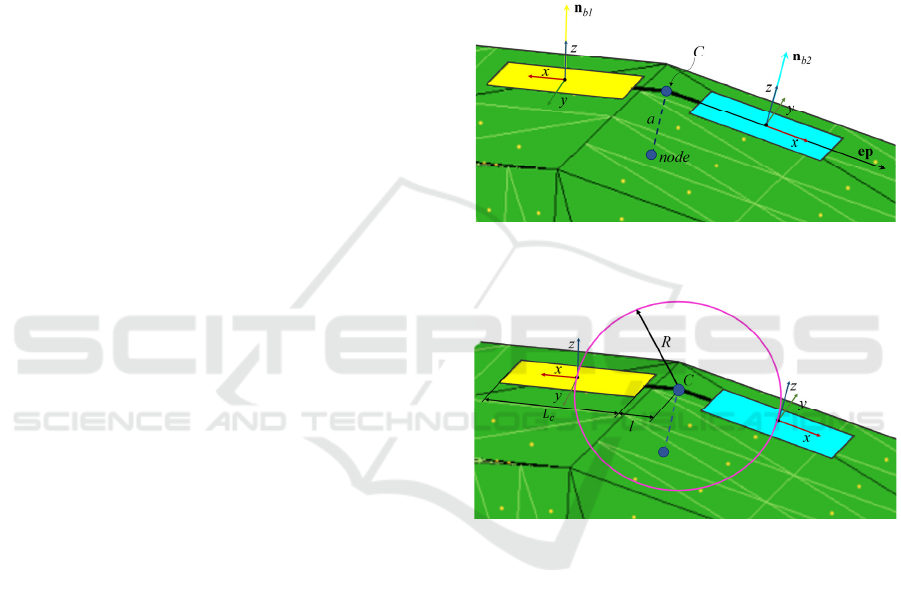
First, the spherical or ball joint connecting the two
robot modules, called C, is placed at a distance a from
the node or centroid of the triangle being evaluated,
along the direction normal n to the triangle. Then, a
principal axis called ep is defined, which is taken as
any vector perpendicular to the normal n. This vector
ep represents the main axis of the robot, i.e., the axis
along which both bodies depicted in Figure 1 would
be aligned if the robot adopted a posture so symmetric
and “straight” as that shown in Figure 1. Evidently,
since the terrain over which the robot moves is not
flat, the final posture adopted by the robot at each
node (this final posture will be constructed in the
following paragraphs of this section) will not be so
symmetric and straight as in Figure 1, but it will still
be somewhat oriented in the direction of ep.
After aligning the bodies with the principal axis
ep, the coordinate frames of each body, which define
the orientation of each body, are calculated as shown
in Figure 4. To this end, the bodies are arranged
perpendicular to the normal n
bi
of the triangle located
directly below the centre of each body
i. The normal
of the body corresponds to the z-axis, while the x-axis
is defined as the normalized projection of the
principal axis ep on the plane of the body. Finally, the
y-axis is obtained by the cross product of the z-axis
and the x-axis.
In addition, the centres of the bodies are
determined as the intersection between each of the x-
axes of the bodies (regarded as infinite lines passing
through the spherical joint C) and a sphere of radius
𝑅, centred at C, as illustrated in Figure 5.
The intersection points between the sphere and the
x-axes gives:
𝑥
𝑥
𝑅𝑥
,
𝑦
𝑦
𝑅𝑥
,
𝑧
𝑧
𝑅𝑥
,
(5)
where 𝑅𝑙 𝐿
/2 is the sum of the length 𝑙 of the
little segment that joins each body to the spherical
joint C, and L
C
is the length of each body along its x-
axis. On the other hand, x
o
, y
o
and z
o
correspond to
position of joint C, while the coordinates 𝑥
, 𝑦
, 𝑧
represent the centre of body i. 𝑥
,
, 𝑥
,
, and 𝑥
,
are the components of the unit vector of the x-axis of
each body i.
Figure 4: Central bodies of the robot without legs in the ep
direction.
Figure 5: Intersection of the sphere centred at C with the x-
axis of each body.
After defining the position and orientation of each
body, the four legs are added to each body. Initially,
these legs are added forming exactly a right angle
with respect to the body, similar to the legs of the
yellow body shown in Figure 6. Note that, if the
terrain under the bodies of the robot is not flat for the
node that is being evaluated, in general, some of the
feet may not be in contact with the terrain after
placing the legs at right angles as indicated here.
Indeed, if the terrain below the body is concave, some
legs may penetrate under the terrain, and if the terrain
is convex, some feet may be in the air above the
terrain, not touching it. However, this is not a problem
because the final posture of the robot will be corrected
using the Newton-Raphson method as explained later,
Simultaneous Planning of the Path and Supports of a Walking Robot
653
so that it correctly rests on the terrain, with all feet in
contact with the ground.
The penultimate operation to build the tentative
posture of the robot when placed over each node
consists in finding the points of contact where each
foot should be placed (as said in the previous
paragraph, some feet may be under the terrain if it is
concave, or over it if it is convex). This is done by
finding the projection of each foot on the closest
triangle of the terrain, as explained at the end of
Section 3. These projections are the footholds where
each foot should be placed.
Finally, the last operation to complete the
calculation of the posture of the robot when placed
over each node of the terrain, consists in defining a
set of loop-closure equations that represent the
following constraints: each foot of the robot should
be placed at the corresponding closest foothold, and
both bodies should be joined by the spherical joint C.
These constraints define a system of nonlinear
equations whose unknows are the position and
orientation coordinates of each body, as well as the
joint angles (q
1
, q
2
, q
3
) of each leg (recall these joint
angles in Figure 1). This nonlinear system is solved
using the Newton-Raphson method, starting the
iterations from the tentative posture built by
following all the operations described in this
subsection 5.1. The result of these iterations is a
realistic and feasible posture of the robot with both
bodies joined at C and all feet resting on the ground,
as illustrated in Figure 6. This feasible posture will be
similar to the tentative posture which is used as the
seed of the Newton-Raphson iterations.
Figure 6: The robot with all its legs resting on the ground.
Once the robot adopts a feasible posture on the
ground, its stability is tested using the method
described in Section 4, obtaining the sub-cost 𝑒 used
in (4). The difference between this posture at the
current node and that at its neighbour is also
calculated, to obtain the value of the sub-cost 𝑞 used
also in (4). All calculations described in this
subsection 5.1 are repeated three more times, but each
time rotating the main axis ep about n by 45º with
respect to the previous time, so that different postures
of the robot are tested to roughly cover all possible
orientations about axis n, finally retaining the posture
that gives a smaller value of 𝑒𝑞. This is added to
the sub-costs 𝑑 and ℎ of (4), to complete the
calculation of the cost at each node, making it
possible for the A* algorithm to determine the
shortest route to move from a starting point to an end
point.
After executing the A* algorithm, it returns the
centroids of the subdivided triangles of the terrain that
form part of the optimal path, the information of the
posture of the robot at each node of the optimal path
(orientations and positions of the central bodies and
joint angles of the legs), and the support points for all
legs, at each node. This will be illustrated with some
examples in the next section.
6 RESULTS
The evaluation of the effectiveness of the algorithm
A* for calculating the path and the determination of
the robot positions and contact points has been carried
out in this Section 6. For this purpose, two examples
have been studied, which are significant and
representative for the method because they require the
robot to climb or descend an irregular terrain with
several slopes. For each example, an initial and a final
position have been defined, and the resulting paths
have been compared, considering or ignoring the
influence of the stability of the robot in each position
until the target position is reached. In the study, a
friction coefficient of 0.4 has been considered.
In the first study, the robot must ascend the first
ramp and reach an intermediate position on the
second ramp (P
A
[0, 0.75, -0.2]), starting from an
initial position in the lowest part of the terrain (P
O
[0,
0, -0.5]). To evaluate the optimal path from P
O
to P
A
without taking stability into account, Figure 7a, the
A* algorithm takes 135 seconds to find the path (this
algorithm was implemented in Matlab 2015a on
Windows, and it was run on an Intel(R) Core(TM) i7-
8750H CPU @ 2.20 GHz processor with 16 GB
RAM). The red dots in Figure 7 represent the
centroids of the triangles forming part of the optimal
path where the projection of the centre of the robot's
bodies, C, would be placed and the robot's position
would be constructed as explained in section 5.1. The
path obtained (Figure 7a) shows how the robot goes
straight up to P
A
on the steep part of the second ramp,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
654

where we should expect that the robot would lose
stability and tip over or slip, as the next simulation
confirms.
On the other hand, when stability is taken into
account for optimal path finding, Figure 7b, the robot
goes up the ramps that have an inclination that does
not compromise its stability, even though this implies
a longer path. In that case, the algorithm requires a
response time of 544 seconds to find the optimal path.
However, this path ensures that the robot is stable
throughout the entire route, avoiding possible tipping
or slipping problems.
Figure 7: a) Optimal path of the robot from P
O
to P
A
without
stability (red dots). b) With stability.
Furthermore, the A* algorithm simultaneously
provides the robot's positions and the contact points
at each node of the obtained path. Figure 8 shows
some of the robot positions along the path shown in
Figure 7b, considering the stability and orientation of
the robot.
Figure 8: Positions and contacts of the robot in the path to
P
A
.
In the second example studied, the optimal path is
calculated for the robot to descend from the highest
point of the terrain
P
B
[-1, -0.4, 0.2] to the point P
O
,
Figure 9. Note that this example requires the robot to
traverse most of the terrain and, therefore, it includes
other example paths in which the robot may need to
travel between intermediate points of the terrain.
On the one hand, similar to the previous example,
the robot path is calculated using the A* algorithm
without taking stability into account, Figure 9a. In
this case, the algorithm takes 247 seconds to
determine the path with the lowest cost, which is the
one that goes straight to P
O
down the ramp with a
steep slope where the robot would evidently not be
stable and would tip over.
On the other hand, when considering the stability
of the robot in the path calculation (Figure 9b), the
response time of the algorithm increases significantly,
reaching approximately 1 hour and 9 minutes. This is
because the robot must avoid going straight down the
steep ramp to maintain its stability. Instead, it needs
to travel a longer path, involving more nodes, to reach
the end point safely.
Figure 9: a) Optimal path of the robot from P
B
to P
O
without
stability (red dots). b) With stability.
Figure 10 shows some of the robot positions
(postures and contact points) going through the
optimal robot path obtained by algorithm A* to reach
P
O
from the position P
B,
ignoring robot stability,
Figure 10a, and considering stability, Figure 10b.
Figure 10: a) Positions and contacts of the robot in the path
to P
O
without stability. b) With stability.
The algorithm was run again to plan a path from
P
O
to P
B
, i.e. to climb the terrain instead of descend
it, and it took 1hour and 42 minutes, which is about
30 minutes more than the time taken to compute the
descending path. More simulations were run between
initial and final points near P
O
and P
B
, and in all of
them we observed that the time to find an ascending
path was slightly higher than to find a descending
one. This can be explained by the fact that, when
starting up, many of the nodes of the terrain belong to
steep slopes at which the robot is unstable, so the
search is more directed than when starting down,
where the nodes yield stable postures and there are
more options to explore.
Simultaneous Planning of the Path and Supports of a Walking Robot
655

7 CONCLUSIONS
This paper describes a method for path planning of
multi-legged robots in irregular environments. To
tackle this challenge, a method has been proposed that
starts with the creation of a triangular mesh to define
the contact points of the legs and establish a mesh of
nodes for path planning. After this, the A* algorithm
has been used to find the optimal path from an initial
position to the target position, ensuring that the robot
maintains stability along the path and adopts realistic
and coherent configurations.
This method has also made it possible to identify,
at each point in the path, the robot's contact points and
postures, providing a representation of its positions in
the environment.
However, considering that the robot will need to
plan the next path while it executes the current one, it
will be crucial to improve the search times of the
current algorithm. In this context, a promising
strategy to increase efficiency is to explore the use of
Rapidly Exploring Random Trees (RRT) instead of
the A* algorithm. Although the A* algorithm is
capable of finding the absolute optimal path, its high
computational cost limits it in applications requiring
real-time computations. On the other hand, the RRT
algorithm offers faster search times, although the
solutions found may be sub-optimal compared to the
exhaustive approach of the A* algorithm.
As another future line of research, it will be
necessary to address the planning of the movements
between successive postures, i.e.: for every two
neighbouring postures of the optimal path obtained by
the algorithm, it will be necessary to determine a
sequence of movements to transform one posture into
another (sequence of raising and swinging legs, etc.),
while keeping stability.
ACKNOWLEDGEMENTS
This work is part of the INVESTIGO 2022
Programme (file number: INVEST/2022/432) funded
by the Valencian Conselleria d’Innovació,
Universitats, Investigació i Societat Digital, and by
the European Union (Next Generation EU); and of the
CIGE/2021/177 project, funded by the Valencian
Conselleria d’Innovació, Universitats, Ciència i
Societat Digital.
REFERENCES
Aceituno-Cabezas, B., Dai, H., Cappelletto, J., Grieco, J.
C., Fernández-López, G. (2017). A mixed-integer
convex optimization framework for robust multilegged
robot locomotion planning over challenging terrain. En:
2017 IEEE/RSJ International Conference on Intelligent
Robots and Systems, pp. 4467–4472.
Aceituno-Cabezas, B., Mastalli, C., Dai, H., Focchi, M.,
Radulescu, A., Caldwell, D. G., Cappelletto, J., Grieco,
J. C., Fernández-López, G., Semini, C. (2018).
Simultaneous contact, gait, and motion planning for
robust multilegged locomotion via mixed-integer
convex optimization. IEEE Robotics and Automation
Letters 3(3), 2531–2538.
Caron, S., Kheddar, A. (2016). Multi-contact walking
pattern generation based on model preview control of
3D CoM accelerations. In 2016 IEEE-RAS 16th
International Conference on Humanoid Robots, pp.
550–557.
Caron, S., Pham, Q. C., Nakamura, Y. (2017). ZMP support
areas for multicontact mobility under frictional
constraints. IEEE Transactions on Robotics 33(1),67–
80.
Dai, H., Tedrake, R. (2016). Planning robust walking
motion on uneven terrain via convex optimization. En:
2016 IEEE-RAS 16th International Conference on
Humanoid Robots, pp. 579–586.
Ellenberg, R. W., Oh, P. Y. (2014). Contact wrench space
stability estimation for humanoid robots. In 2014 IEEE
International Conference on Technologies for Practical
Robot Applications, pp. 1–6.
Hirukawa, H., Hattori, S., Harada, K., Kajita, S., Kaneko,
K., Kanehiro, F., Fujiwara, K., Morisawa, M. (2006). A
universal stability criterion of the foot contact of legged
robots-Adios ZMP. En: 2006 IEEE International
Conference on Robotics and Automation, pp. 1976–
1983.
Jenelten, F., Grandia, R., Farshidian, F., Hutter, M. (2022).
TAMOLS: Terrain-aware motion optimization for
legged systems. IEEE Transactions on Robotics 38(6),
3395–3413.
Li, S., Chen, H., Zhang, W., & Wensing, P. M., (2022). A
geometric sufficient condition for contact wrench
feasibility. IEEE Robotics and Automation Letters 7(4),
12411–12418.
Navaneeth, M. G., Sudheer, A. P., Joy, M. L. (2022).
Contact wrench cone-based stable gait generation and
contact slip estimation of a 12-DOF biped robot.
Arabian Journal for Science and Engineering 47,
15947–15971.
Orsolino, R., Focchi, M., Mastalli, C., Dai, H., Caldwell, D.
G., Semini, C. (2018). Application of wrench-based
feasibility analysis to the online trajectory optimization
of legged robots. IEEE Robotics and Automation
Letters 3(4), 3363–3370.
Vukobratović, M., Borovac, B. (2004). Zero-moment
point—thirty five years of its life. International Journal
of Humanoid Robotics 1(1), 157–173.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
656
