
Curved Surface Inspection by a Climbing Robot:
Path Planning Approach for Aircraft Applications
Silya Achat, Julien Marzat and Julien Moras
DTIS, ONERA, Universit
´
e Paris Saclay, F-91123 Palaiseau, France
Keywords:
Coverage Path Planning, Cell Decomposition, Curved Surface Inspection, Sensor Constrained Inspection.
Abstract:
This paper presents a path planning method for a climbing robot used for the exterior inspection of an aircraft.
The objective is to plan a covering path with the least possible overlap, while respecting constraints related
to an embedded sensor, a power cable, and the robot mechanical efforts. To achieve this, a semantic 2D grid
model of the aircraft is first created by unfolding and labeling a 3D mesh reference model. An obstacle-based
area decomposition method is then applied to divide this 2D discrete space into inspection areas. Inspection
segments that satisfy the sensor constraints are then sampled and rearranged based on the order of the areas.
The connections between the inspection segments are finally determined by a weighted A
∗
search approach,
so as to limit the gravity-induced mechanical efforts on the robot.
1 INTRODUCTION
Aircraft maintenance is crucial to ensure passenger
safety, which includes inspecting their external sur-
faces to trigger condition-based maintenance opera-
tions. Early detection of defects, especially on the
fuselage, is necessary to prevent them from causing
further damage to the structure. These operations are
generally carried out manually by operators, but in re-
cent years the use of remotely operated robotic means
has been studied, in particular unmanned aerial vehi-
cles (Bugaj et al., 2020). They allow the fast observa-
tion of areas that are difficult to access, while reducing
the risks taken by technicians. However, these aerial
platforms present some drawbacks. First, they require
skilled pilots which limits their development and the
use of fleets. Second, they cannot deploy all types of
measurement payloads, in particular those requiring
proximity such as ultrasound measurements. Finally,
they present a risk of damage to the inspected aircraft
in case of control loss.
The use of autonomous climbing robots represents
an alternative to avoid these issues (Fernandez et al.,
2016). Indeed, by moving directly on the surface of
the aircraft, these robots will be able to conduct dif-
ferent types of observation (visual, sonar, etc.) while
not requiring a qualified pilot. Different locomotion
and adherence technologies can be considered such
as wheeled robots with ducted fans (Qin et al., 2022;
Andrikopoulos et al., 2019) or pneumatic legged con-
figurations (Wang et al., 2019), however magnetic
wheels (Starbuck et al., 2021) are not applicable for
aircraft surfaces. These climbing robots are generally
quite slow, therefore a critical point is to optimize the
inspection path allowing to cover the area so that it
is the shortest, while taking into account the inspec-
tion constraints of the embedded sensors (in range
and direction of observation), the motion of the robot
(mechanical constraint of adherence or winding of a
power cable) and prohibited areas such as the fins.
This paper presents the definition of a method for
planning the inspection path for such climbing robots
to inspect the fuselage of an aircraft, considering nu-
merous operational and technical constraints. The nu-
merical performances of the procedure are evaluated
on a 3D mesh model, as illustrated in Figure 1. This
new method relies on a decomposition in areas delim-
ited by obstacles of arbitrary shapes from an unfolded
2D grid model. Inspection segments are defined in
these areas with sensor constraints taken into account,
and are finally connected using a weighted A
∗
search
procedure to provide the global inspection path.
2 RELATED WORK
Numerous studies have addressed the problem of
computing a covering path for applications such as
surface inspection (Wu et al., 2015; Liu et al., 2022),
as well as in the context of autonomous vacuums
Achat, S., Marzat, J. and Moras, J.
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications.
DOI: 10.5220/0012185300003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 433-443
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
433

Figure 1: Illustration of a path planned for a climbing robot
performing aircraft fuselage inspection.
(Hasan et al., 2014), industrial painting robots (Wu
and Tang, 2023; Chen et al., 2008), or problems
related to the traveling salesman (Rai et al., 2014;
Dahiya and Sangwan, 2018). These paths can be com-
puted on flat or curved surfaces. In the case of curved
surfaces, there are two possible approaches: either a
path is directly computed in the 3D space based on a
3D model, or a representative 2D parametrization is
first extracted from the 3D model to exploit a planar
model for path planning.
Various strategies can be applied to obtain a
path that fully covers the surface to be inspected.
Sampling-based methods generate random paths,
leading after many iterations to the complete scan-
ning of a given area (S
¨
orme and Edwards, 2018). On
the other hand, deterministic methods can be more
time-efficient by dividing the area of interest into sub-
areas delimited by obstacles, called cells. This section
presents a state of the art of the methods related to the
above-mentioned issues, namely path planning meth-
ods of 3D structures, different methods for construct-
ing a representative 2D model from a 3D one, and
previous works dealing with the decomposition of a
zone into sub-areas from obstacles.
Some techniques bypass the 2D representation of
space and allow for the construction of covering paths
directly on the curved surfaces to be treated. This is
the case in the work presented in (Mineo et al., 2017)
where parallel paths are calculated on the surface of a
3D mesh model of a curved piece to be followed by a
painting robot. The objective is to create paths spaced
by a constant distance d from an edge of the piece.
Planes Π
i
are defined to be perpendicular to the refer-
ence edge, containing regularly spaced points P
i
. To
find the points located at a distance d from the refer-
ence edge, we have to simply move from P
i
towards
the successive intersection points with a mesh of the
surface: the curvilinear distance between P
i
and an
intersection point is the sum of the distances between
each intersection point. The point on plane Π
i
at a dis-
tance d from P
i
is determined by linear interpolation
between the two successive intersection points having
curvilinear distances from P
i
respectively greater and
lower than d.
Studies on the inspection of large metallic struc-
tures such as ship hulls by small differential-drive
robots with magnetic wheels (Starbuck et al., 2021)
have focused on establishing a planar model repre-
sentative of a cylinder by stereographic projection.
This model has the advantage of being continuous and
therefore exploitable for state estimation by a Mani-
fold Invariant Extended Kalman Filter. Indeed, an un-
rolled model in cylindrical coordinates would present
a discontinuity at the angular position ±π. However,
in the context of planning an inspection path, this
kind of cylindrical parametrization would be more ap-
propriate as it involves less deformation of distances
between points on the surface. Moreover, this dis-
continuity of the unrolled model could be exploited
to manage directly the non-winding constraint of a
robot’s power cable during path planning.
Coverage Path Planning (CPP) is a well-known
discipline, and a relevant state-of-the-art is presented
in (Galceran and Carreras, 2013). A common first
step among the methods described is the decompo-
sition of space into cells defined by the obstacles
present in the space. The Boustrophedon Decom-
position method (Choset and Pignon, 1998) divides
a continuous space into cells based on the vertices
of the obstacles, which requires the obstacles to be
modeled as polygons. This constraint is lifted by
the Morse-Based Boustrophedon Cellular Decompo-
sition method (Acar et al., 2002), which defines cells
based on critical points on the obstacles depending
on the inspection direction. Other methods exploit
a discrete environment model represented as a grid,
such as the Grid Based Coverage using wavefront al-
gorithm (Zelinsky et al., 1993) and Spiral Spanning-
Tree Coverage (Gabriely and Rimon, 2001).
The method described in (Zelinsky et al., 1993)
decomposes the space into a grid of uniform cells,
where those in contact with an obstacle are not con-
sidered by the path planning algorithm. The starting
and ending cells are defined, and the algorithm begins
the path search from the ending cell. The idea is to
propagate a wave from the ending cell to the starting
cell, assigning each encountered cell its distance from
the ending point. Thus, the cell at the ending point
is assigned the index 0. Then, at each iteration, this
index is incremented and assigned to all neighboring
cells that have not yet been visited. The process is
iterated until the starting cell is reached. A covering
path is then derived by starting at the starting cell and
moving at each iteration to the neighboring cell with
the highest assigned number (breaking ties randomly
if necessary). Possible applications of this method are
adapted to autonomous vacuum cleaners, lawn mow-
ers or security robots.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
434

Another method (Gabriely and Rimon, 2001) is
applicable online for a household robot equipped with
onboard position, orientation and a range sensor. A
decomposition of a large proportion of the free space
into so-called mega cells of size 2D is performed.
Each mega-cell is divided into four sub-cells of the
size of the robot D, which are visited only once by
the planned path. It is assumed that a square-shaped
planar tool is attached to the robot, and is required
to cover the entire surface of a workspace. A con-
straint is that the robot can only move in directions
orthogonal to the four sides of this tool which cannot
rotate. Starting from an initial cell, the next direction
of movement is determined by selecting the unvisited
mega cell in its neighborhood (a mega cell is consid-
ered visited if at least one of its sub-cells has been
visited) in counterclockwise order, resulting in spiral-
ing paths. During this first phase, a spanning tree is
built by connecting the mega cells in their order of
visit until each mega cell has been visited. Thus, at
the end of this recursion, the path will have traversed
the outer part of the spanning tree built online. In a
second phase, the inner part of the spanning tree is
updated by passing through the remaining unvisited
sub-cells of the visited mega cells.
However, the use of a sensor during the robotic
inspection of an aircraft’s surface requires specific
observation directions. This excludes the use of the
aforementioned Grid Based Coverage using wave-
front algorithm (Zelinsky et al., 1993) and Spiral
Spanning-Tree Coverage (Gabriely and Rimon, 2001)
path planning methods. The Mesh Following Tech-
nique (Mineo et al., 2017) method could address this
constraint but does not handle obstacle avoidance. An
additional constraint comes from the robot’s power
cable, which should not wrap around the structure.
This suggests the use of a 2D unfolded model rather
than a 3D one, where the angular discontinuity di-
rectly enforces this constraint, unlike a 2D continuous
model similar to (Starbuck et al., 2021). Finally, cell
decomposition methods such as (Choset and Pignon,
1998) and (Acar et al., 2002) are relevant strategies
for optimizing the order of coverage inspection paths.
However, these methods would need to be adapted to
a discretized environment to be compatible with path
planning methods that exploit grids.
3 PROPOSED APPROACH
3.1 Problem Formulation
The problem considered is to generate a path P as
the ordered set of waypoints {W
n
} that a climbing
robot must traverse so that its onboard sensor can
scan entirely a given aircraft surface (the focus is put
here on the fuselage). The path generation solution
must respect constraints related to the sensor embed-
ded on the robot (here, a laser sensor which must
scan a locally flat segment is considered), prevent the
power cable from tangling, and minimize the gravity-
induced efforts on the robot.
By a space transformation, the inspection zone
can be represented in 2D and discretised into a se-
mantic grid G of dimensions i
max
× j
max
cells.
The objective then becomes to find a minimal-
length, ordered set of adjacent traversable cells Q =
{q
1
,q
2
,...,q
n
} ⊂ G such that if the centre of the sen-
sor line projected in G sequentially traverses each cell
q ∈ Q , the sensor will have scanned all the traversable
cells. The sensor line is thus considered to be perpen-
dicular to the direction of travel in the grid.
Definition 3.1 ( Cell q ). Square of a 2D grid with
coordinates (i, j) to which a semantic label l is asso-
ciated. The cell is traversable depending on a user-
defined rule on the label defined in Table 1.
Definition 3.2 ( Segment ). Ordered set of adjacent
cells q.
Definition 3.3 ( Waypoint W ). Each cell q ∈ G of the
2D grid corresponds to a waypoint W defined in the
3D space.
First, a method is presented for creating the two-
dimensional semantic grid G corresponding to a sim-
plified and unfolded model of an airplane from a
3D mesh model format, by parametrizing the ex-
ternal surface of the airplane in cylindrical coordi-
nates. Then, a method for planning parallel inspection
segments on this unfolded 2D representation is de-
scribed, such that each segment corresponds to a sub-
sampling of cells q belonging to the grid represent-
ing the aircraft surface, and such that the set of these
segments S respects the inspection sensor constraint
and ensures complete coverage of the surface. The fi-
nal set Q is obtained by ordering and connecting the
segments using a weighted A
∗
procedure whose cost
takes into account the efforts. The 3D path P is fi-
nally given by associating to each cell q
n
∈ Q its cor-
responding waypoint W
n
.
3.2 2D Aircraft Model from Unfolded
3D Representation
The outer surface of an aircraft, excluding wings and
control surfaces, can be parametrized in cylindrical
coordinates with the radius variable representing the
surface of interest. Based on this principle, this sec-
tion proposes a method for creating a 2D semantic
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications
435
model of an aircraft corresponding to the unfolded
model in cylindrical coordinates, which can then be
used for path planning of inspection. This discontinu-
ity in the unfolded model implicitly prevents the robot
from following a path that would wrap around the air-
craft, which would be problematic with respect to the
power cable. In this work, planning on (or under)
the wings is not addressed, since these flat surfaces
do not require any particular preprocessing and path
generation is straightforward using a Boustrophedon
method (B
¨
ahnemann et al., 2021).
Starting from a 3D mesh model of an aircraft, the
vertices are extracted. To obtain a point cloud describ-
ing only the surface of the aircraft in a more homo-
geneous manner, the first step is to interpolate points
between the vertices. To take into account the seman-
tics of the different parts of the aircraft, each point in
the cloud has been manually labeled as indicated in
Table 1. A central axis ⃗z has also been defined, so
as to convert the points from Cartesian coordinates to
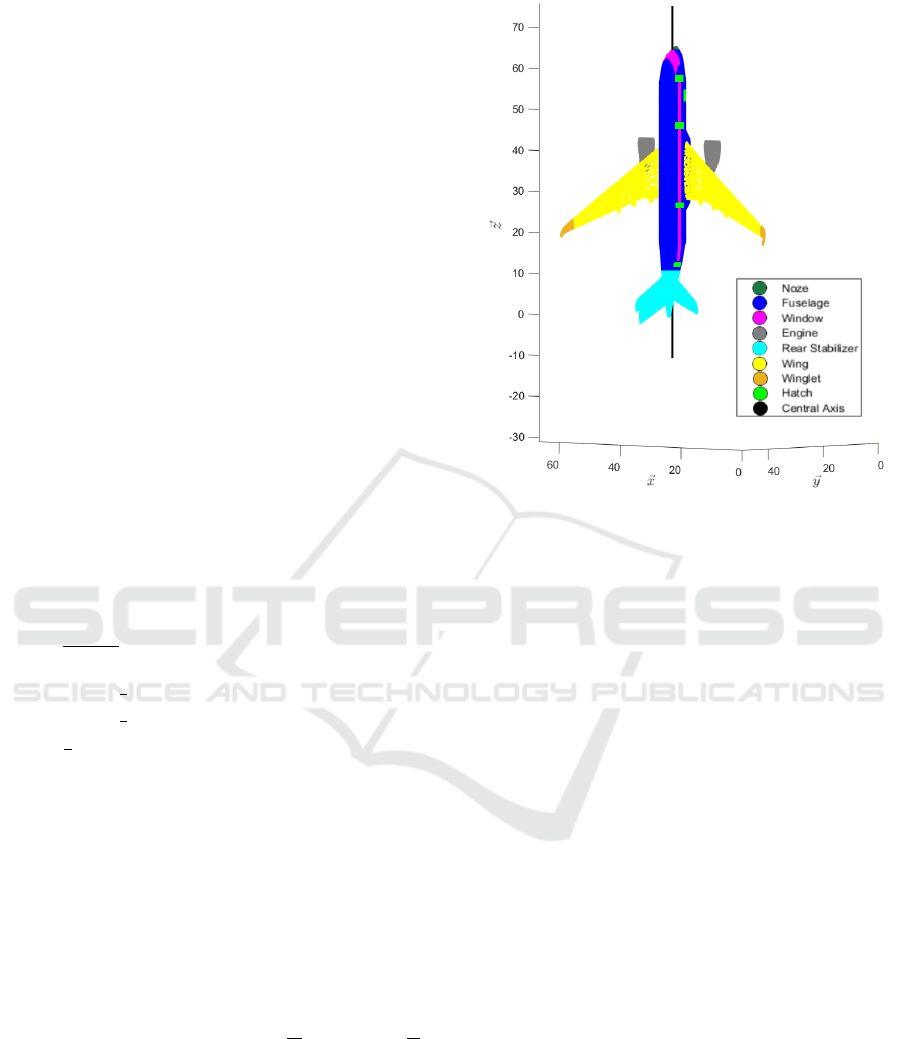
cylindrical coordinates (cf. Figure 2).
The 3D point-cloud is defined in Cartesian frame
P
cart
= {P
i
cart
} for i ∈
0 N
where N is the num-
ber of points of the point-cloud. A semantic label l
i
is
associated to each point of the cloud. We define the
cloud P
cyl
from P
cart
through the cylindrical coordi-
nate transformation:
∀P
cart
=
x y z
, P
cyl
=
ρ θ z
where:
ρ =
p
x
2
+ y
2
θ =
arctan(
y
x
) if x > 0
arctan(
y
x
) + sign(y) · π if x < 0
π
2
· sign(y) if x = 0 and y ̸= 0
indeterminate else
An intermediate grid in cylindrical coordinates is de-
fined with steps δθ and δz. It is used to define the two
following mappings for each cell:
• R (θ, z), which contains a radius ρ as a function of
θ and z (see Figure 3a)
• L(θ,z), which describes the corresponding label l
as a function of θ and z (see Figure 3b )
For a given cell of coordinates
θ
f
z
f
and
size
δθ δz
T
we consider the set of points
P
f
= {P
i
∈ P
cyl
} such that θ ∈ θ
f
±
δθ
2
and z ∈ z
f
±
δz
2
.
An index i
f
is then computed as follows
i
f
= arg max
P
i
∈P
f
(ρ
i
)
R (θ, z) = ρ
i
f
L(θ,z) = l
i
f
If the set P
f
contains several points with identical ρ,
the tie is broken using a majority vote on the labels of
the set.
Figure 2: Semantic point cloud obtained after vertex inter-
polation and manual labeling from an aircraft 3D mesh.
In the aircraft point-cloud considered, points la-
beled ”Winglets”, ”Engines”, and ”Rear Stabilizer”,
that are considered as non-traversable by the robot
and which can be easily truncated from the model,
were excluded. The ”Wing” label points with a ra-
dius larger than that of the surrounding fuselage are
also excluded, not only because path planning in this
area is not addressed as justified previously, but also
because their shape is not expected to be compatible
with the surface representation based on θ and z. In-
deed, several ”Wing” labeled points could have highly
variable radius, and only the one with the largest ra-
dius would be retained in the model, which is not
representative of the actual wing surface. Moreover,
this would result in the projection of the ”Wing” label
onto fuselage areas located in the same cell, which
would exclude these areas from the inspection path
calculation. From the perspective of the fuselage in-
spection, the resulting ”Wing” points are considered
as non-traversable obstacles around which the inspec-
tion should be conducted.
The semantized coordinates of a point
(ρ θ z)
T
and the associated label l in the se-
mantic point cloud can be directly obtained from the
grid indices (i j)
T
in the unfolded discrete model
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
436
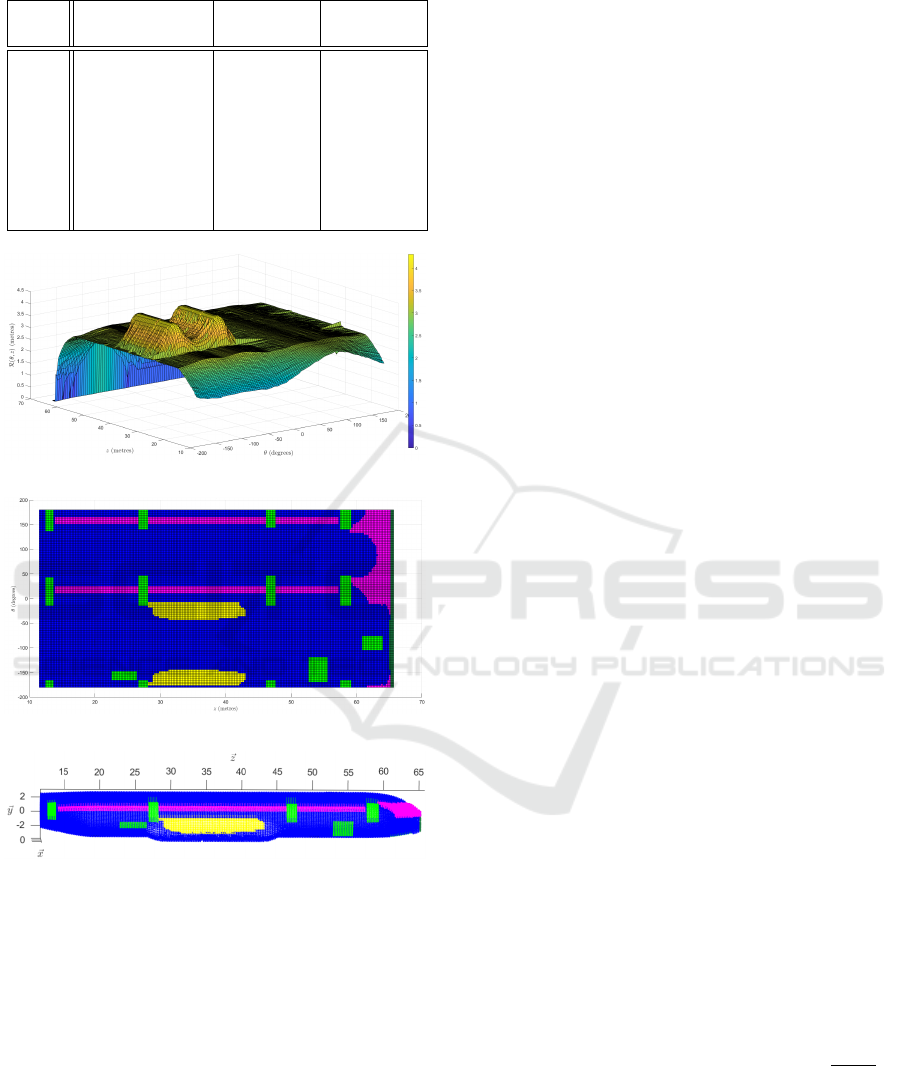
Table 1: Semantic labels and related traversability.
Label
l
i
Label Name Color
is
traversable?
l
1
Nose dark green 0
l
2
Fuselage blue 1
l
3
Window magenta 1
l
4
Engine grey 0
l
5
Rear Stabilizer cyan 0
l
6
Wing yellow 0
l
7
Winglet orange 0
l
8
Hatch green 0
(a)
(b)
(c)
Figure 3: 3a : Airplane Surfacic Model R (θ,z), 3b : Air-
plane Semantic Unfolded Model L(θ,z) , 3c : 3D Semantic
Point Cloud reconstructed by inverse transformation (1).
through the inverse transformation:
θ = i · δθ
z = j ·δz
ρ = R (θ,z)
l = L(θ, z)
(1)
In the model studied, the z-axis origin has been
repositioned such that the points labeled as ”Rear Sta-
bilizer” are excluded from the 2D grid. This inverse
transformation makes it possible to reconstruct a 3D
point cloud from the two surface models, as illus-
trated in Figure 3c. This will allow us then to obtain
the waypoints in the 3D space from the set of q cells
in the 2D grid. Three 2D grid layers of dimension
i
max
× j
max
can now be defined, as follows.
Definition 3.4 ( Label Grid G ). The label at coordi-
nates (i, j) of the semantic grid G is valued as:
G(i, j) = L(i · δθ, j · δz) (2)
Definition 3.5 ( Traversability Grid B ). B is a binary
grid where
B(i, j) =
(
1 if G(i, j) is traversable
0 otherwise
(3)
Then, to avoid collisions between the inspection robot
and obstacles, a dilation is applied to B so that the
cells with a non-traversable label are dilated by a
circular structuring element with radius equal to ∆ j,
which is the length of the sensor field projected onto
the grid.
Definition 3.6 ( Obstacle Grid O ). O is an obsta-
cle grid of dimensions i
max
× j
max
obtained by us-
ing the Connected-Component Labeling algorithm
(Chang et al., 2004) on the grid B. As a result, neigh-
bor cells q ∈ O corresponding to obstacles are as-
signed the same index, and cells corresponding to free
space are assigned 0.
3.3 Inspection Segments
From the two-dimensional grid model of the aircraft,
a full-coverage path should be determined to provide
successive inspection points fulfilling the required ob-
jectives and constraints. The climbing robot must per-
form a full coverage of the surface while avoiding ob-
stacles such as hatches and wings. The robot’s sen-
sor field of view should also be aligned with the sur-
face to carry out its mission. This results in the need
for the inspection paths to be wrapped around the air-
craft’s longitudinal axis, each of them remaining in a
plane defined by a constant z coordinate. In a 2D grid,
this corresponds to scanning the cells in a direction
collinear with
⃗
i. The definition of the inspection seg-
ments is performed thanks to the binary grid B. They
are sampled along the i axis between labels consid-
ered as obstacles, and they are spaced from each other
along the j axis by a distance of ∆ j = floor
l
sensor
2 · δz
,
where l
sensor
is the width scanned by the sensor on the
surface. This ∆ j parameter could be chosen smaller
than this value in order to pre-compensate for path
tracking errors by the robot. Each cell q of a segment
(corresponding to coordinates (i, j)) is stored in a vec-
tor p
k
, which corresponds to a path identified by index
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications
437

Figure 4: Definition of the inspection segments p
k
visual-
ized on the G(i, j) grid (simplified version without dilata-
tion of the obstacles). The robot is represented in grey, and
the field of its inspection sensor is shown in white. The di-
rection of the robot’s movement is represented by a black
arrow.
k (see Figure 4), and the collection of these segments
is stored in a set of inspection segments S.
Definition 3.7 ( Inspection Segment p
k
). A segment
p
k
of index k ∈ N
∗
, and of first cell q
b
and last cell q
e
with respective coordinates (i
b
, j
b
) and (i
e
, j
e
), veri-
fies:
• ∀q
1
,q
2
∈ p
k
, j
1
= j
2
:= j
k
• if i
b
> 1, then B(i
b
− 1, j
k
) = 0
• if i
e
< i
max
, then B(i
e
+ 1, j
k
) = 0
The collection of these segments is initially stored
in a set of inspection segments S.
3.4 Obstacle-Based Area Decomposition
in 2D Discrete Space
The grid G is partitioned into ordered areas a
m
with
respect to obstacles from the grid O. This will be used
to connect the inspection segments contained in these
areas.
Definition 3.8 ( Area a
m
). The m-th area a
m
is a set
of traversable cells located between groups of non-
traversable cells with the same obstacle index, respec-
tively denoted by n
ol
on the left border and n
or
on the
right border. The areas are primarily ordered along
ascending i indices, and then along the j indices. If
there exists an area a
i
, i < m that has the same n
ol
and n
or
indices as a
m
, then a third index cpt is used
to distinguish them. This defines the unique identifier
vector α
m
= [n
ol
n
or
cpt] of the area a
m
. The ordered
set A stores all the identifiers α
m
.
The obstacle indices n
ol
and n
or
take their values
from the grid O, and if there is no obstacle (i.e. a
traversable cell is located at the minimum or max-
imum i index on a given j-th line) then the default
assigned index is −1.
Remark. The variable cpt ∈ N is a counter to distin-
guish areas that are located between the same obsta-
cles of index n
ol
and n
or
but are not connected along
the j-axis.
All the segments p
k
that belong to an area a
m
are
traversed in ascending order of j to determine the or-
dered set of cells Q
m
. It should be noted that this as-
sumes that the very starting cell of the global path will
be in position (i = 1, j = 1). Let q
b
and q
e
be the start-
ing and ending cells of p
k
. To determine the area a
m
to which a path p
k
belongs, we query the labeled ob-
stacle grid O to find the obstacle identifiers n
ol
and
n
or
respectively neighbors of q
b
and q
e
. Indeed, we
keep track of the last j-coordinate of the last added
path to each area a
m
, and this data is stored in a vec-
tor last j area at the index m. Let q
last
be the last
cell q of the last segment p
k
added in Q
m
. If q
last
is closer in the grid to q
e
than q
b
, the next segment
p
k
= {q
1
,q
2
,..., q
N
} is reversed. This operation con-
sists of reordering p
k
in descending order of indices
n, resulting in a segment p
k
= {q
N
,q
N−1
,..., q
1
}. This
procedure iterates until all the segments p
k
∈ S have
been inserted into Q . As a result, on average, one
inspection segment over two is reversed to sweep the
surface in a Boustrophedon pattern.
Algorithm 1 describes the corresponding pseudo-
code, and an illustration of the clustering is given in
Figure 5. The remaining step of the method is to con-
nect the inspection segments together to form the final
global path Q .
3.5 Path Connection Between
Inspection Segments that Minimize
Gravity Constraints
The robot’s configuration implies that it experiences
the least amount of effort when its vertical axis is par-
allel to gravity, that is to say when it adheres to a hori-
zontal surface. Indeed, the robot tends to slip the most
when it adheres to a vertical surface, which requires it
to deliver more power to adhere more strongly to the
wall and thus increase the frictional force that keeps it
in place. It will therefore expend less energy adhering
to the surface at the top ( θ =
π
2
) and bottom of the air-
craft ( θ = −
π
2
). Moreover, intermediate cells need to
be inserted outside of the inspection segments so that
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
438

Figure 5: Example of areas numbering based on their se-
mantics and surrounding obstacles. When there are no ob-
stacles to the left of an area, n
ol
defaults to −1 (and vice
versa for n
or
). In this example, we can observe that a
1
and
a
2
are differentiated by their value of cpt since the connec-
tion criterion is not satisfied, same for a
3
and a
6
.
the robot can move from an inspected area to an unin-
spected one, and it can also move from one segment to
another within the same area. It is preferable for the
robot to pass through the locations where the grav-
itational force is energetically less constraining. For
this purpose, a weighted version of the A
∗
algorithm is
used to plan the connecting segment (defined below)
linking the last cell of the previous inspected segment
q
last
and the first cell q
b
of a not-yet-inspected seg-
ment.
Definition 3.9 ( Connecting Segment d
k
1
,k
2
). A Con-
necting Segment d
k
1
,k
2
of indices k
1
,k
2
∈ N
∗
is a seg-
ment that connects two inspection segments p
k
1
and
p
k
2
. Let q
b
d
and q
e
d
be the first and last cell of d
k
1
,k
2
,
and q
b
k
and q
e
k
be the first and last cell of p
k
. Then
d
k
1
,k
2
verifies q
b
d
= q
e
k
1
and q
e
d
= q
b
k
2
.
The computation process evaluates the cost f as-
sociated to the starting cell and other neighboring
cells successively until reaching the q
b
cell (the neigh-
borhood is defined as 8-connectivity). These costs be-
tween a currently evaluated node q
cur
and one of its
neighbors q
nei
are defined as:
g(q
nei
,L) = g(q
cur
,L) + c(q
nei
,L) · ∥ξ
nei
− ξ
cur
∥
(4)
f (q
nei
,q
b
,L) = g(q
nei
,L) + ∥ξ
b
− ξ
cur
∥
(5)
where ξ
cur
, ξ
nei
, ξ
b
are the discrete indices (i, j) as-
sociated with cells q
cur
, q
nei
, q
b
, respectively. The
Algorithm 1: Ordering of the inspection segments.
Input: set S, grid O
Output: set Q
1 sets A ← {}, Q ← {[]}
2 Vector last j area ← []
3 for p
k
in S do
4 Integer cpt ← 0
5 cells q
b
← p
k
.begin(), q
e
← p
k
.end()
6 if q
b
.i > 1 then
7 n
ol
← O(q
b
.i − 1,q
b
. j)
8 else
9 n
ol
← −1
10 if q
e
.i < i
max
then
11 n
or
← O(q
e
.i + 1,q
e
. j)
12 else
13 n
or
← −1
14 Vector α ←
n
ol
n
or
cpt
15 Integer m ← A. f ind(α)
16 if m is empty then
17 A.pushBack(α)
18 m ← A. f ind(α)
19 else
20 while |q
b
. j − last j area[m]| ̸= ∆ j and
m not empty do
21 cpt ← cpt + 1
22 α ←
n
ol
n
or
cpt
23 m ← A. f ind(α)
24 q
last
= Q {m}.end().end()
25 if distance(q
last
,q
e
) < distance(q
last
,q
b
)
then
26 p
k
.reverse();
27 Q {m}.pushBack(p
k
)
28 last j area[m] ← q
b
. j
weighting function is defined as :
w(q
nei
,L) =
(
1 + |cos(θ)| if L(θ, z) is traversable
∞ otherwise
(6)
where (θ, z) are the non-discretized coordinates asso-
ciated to q
nei
. θ is defined such that θ ∈ [−π; π] and
such that θ = −
π
2
at the bottom of the aircraft, and
θ =
π
2
at the top. This cost factor gives more weight to
the distance between a node q
cur
and its neighbor q
nei
if it has an angular position θ far from ±
π
2
. It would
also be possible to introduce a cost function that pri-
oritizes a path crossing through certain labels over
others, for example, in cases where avoiding passage
over windows is preferable, without being an absolute
requirement. This is a way to generate a semantic-
aware path from the available graph information, as
previously proposed in (Achat et al., 2022).
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications
439
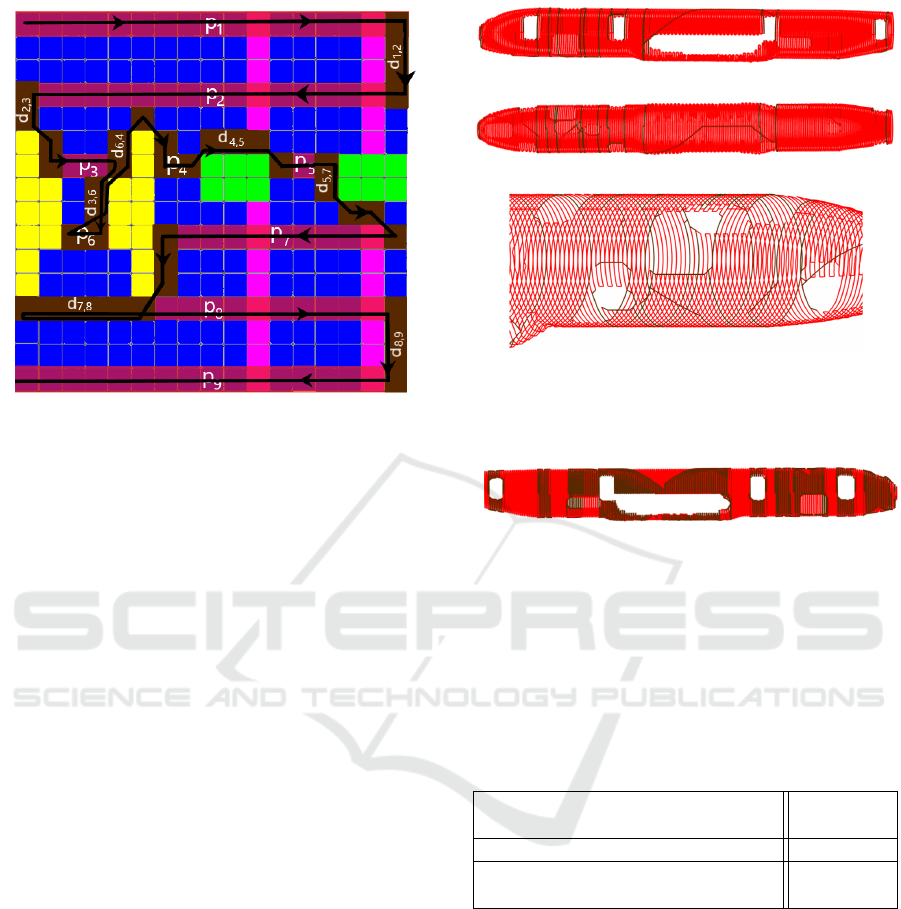
Figure 6: Final global path Q (black) vizualized in the 2D
unfolded discrete space (simplified version). It is composed
of inspection segments p
k
(red) and connecting segments
d
k
1
,k
2
(brown). In this example, Q = {Q
1
,Q
2
,. . . , Q
7
}, with
Q
1
= {p
1
,d
1,2
, p
2
,d
2,3
},Q
2
= {p
3
,d
3,6
, p
6
,d
6,4
},Q
3
=
{},Q
4
= {p
4
,d
4,5
},Q
5
= {p
5
,d
5,7
},Q
6
= {p
7
,d
7,8
},Q
7
=
{p
8
,d
8,9
, p
9
}.
All the inspection segments previously ordered by
areas are traversed in this order to be connected to-
gether in Q . Thus, the Global Path Q contains the
subsets Q
m
ranked in ascending order of m such as
∀Q
m
∈ Q and ∀p
k
∈ Q
m
, if p
k
belongs to a
m
. The
p
k
are ranked in Q
m
in ascending order of k. Every
subsets Q
m
∈ Q contains also connecting segments
d
k
1
,k
2
between every p
k
such as ∀d
k
1
,k
2
∈ Q
m
: ∃!p
k
∈
Q
m
|q
b
d
= q
e
k
, with q
b
d
the first cell of d
k
1
,k
2
and q
e
k
the last cell of p
k
. d
k
1
,k
2
is inserted at the index fol-
lowing p
k
in Q
m
.
In the end, a comprehensive global path which in-
cludes all the inspection segments is obtained, with
additional connecting paths (see Figure 6). The spac-
ing between these segments is at most equal to half of
the sensor’s field of view (by construction of the 2D
grid), ensuring that the entire space to be inspected
is covered. The inverse transformation (1) enables to
project back the global inspection path in the initial
3D space as illustrated in Figure 7.
4 NUMERICAL EXPERIMENTS
4.1 Path Planning Unitary Tests
This section aims to evaluate the previously presented
path planning method, specifically focusing on the
effectiveness of sorting inspection paths into areas
(a) Side view
(b) Top view
(c) Zoomed front bottom view
Figure 7: Global planned path with full coverage. Inspec-
tion segments are represented in red, and connecting seg-
ments that limit gravity constraints in brown.
Figure 8: Computed inspection path in the case ”Without
sorting by areas”. In this case, the length of connecting
paths (represented in brown) is significantly increased in
comparison to the path illustrated in Figure 7.
prior to the connection process. The developed algo-
rithms have been implemented in C++ and run within
a Ubuntu 20.04 WSL Environment on a computer
equipped with Intel Core i5-10400H CPU and 16GB
RAM. Calculation times are detailed in Table 2.
Table 2: Calculation times.
Sampling of inspection segments
p
k
(ms)
0.54
Algorithm 1 (ms) 0.61
Calculation and insertion of
connecting segments (ms)
53
The following Table 3 presents the numerical pa-
rameters associated to the 2D grid generated from the
aircraft 3D mesh. Table 4 presents the characteris-
tics of the inspection segments that have been defined
in the 2D grid. It should be noted that in our case,
the length of the sensor’s field of view is such that its
half-length in the 2D grid ∆ j is equal to 1. This im-
plies that the robot must pass through all the grid cells
q associated with traversable labels.
A comparison was conducted between the com-
puted inspection paths in the two following cases:
• ”With sorting by area”: the global path is com-
puted with the proposed path planning method.
• ”Without sorting by area”: the global path is com-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
440
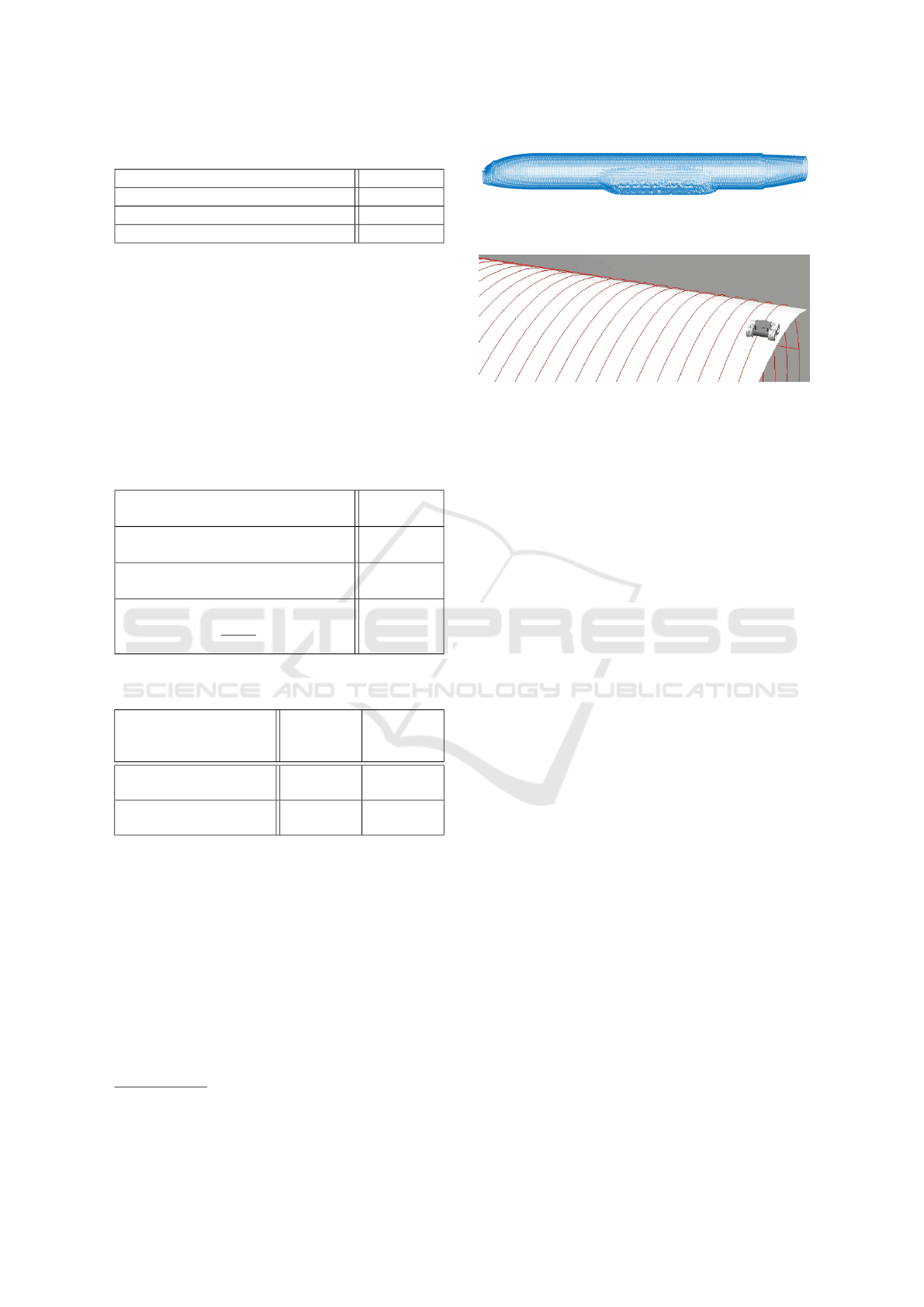
Table 3: Numerical characteristics of the test grid.
Longitudinal resolution δz (metres) 0.24
Angular resolution δθ (degrees) 3.6
Grid dimensions i
max
× j
max
101 × 226
Number of areas 33
puted by connecting the inspection segments to-
gether, still avoiding obstacles, but without prior
area sorting (Section 3.4).
In both cases, the length of the computed path, as well
as the number of connected waypoints were recorded
(see Table 5). It turns out that sorting the inspection
segments by the areas defined between obstacles al-
lows us to halve the total distance traveled, and de-
crease by 93% the number of interpolated waypoints
to connect these segments.
Table 4: Numerical characteristics of the inspection seg-
ments generated from the test grid.
Number of inspection segments
sampled
300
Inspection segments cumulative
length in pixels (in metres)
19282
(3639 m)
Average spacing between two
consecutive waypoints (metres)
0.19
Half-length of the sensor’s range
∆ j in cells
l
sensor
2
in metres
1 cell
(0.4 m)
Table 5: Comparison of interpolated paths with and without
sorting inspection paths into areas.
Method
Without
sorting by
areas
With
sorting by
areas
Number of interpolated
waypoints
19234 1343
Path length
(in metres)
8206 4034
4.2 ROS Simulation
For illustration purposes and to eventually close the
gap with real-world deployment, a ROS simulation
has been set up to test the path-following behaviour
by a climbing robot on the surface of an aircraft. A
wheel-based robot equipped with an adhesion system
similar to the Vortex Climbing Robot (Andrikopou-
los et al., 2019) is simulated using the ROS/Gazebo
environment (see Figure 10)
1
. The adhesive force of
the robot is emulated by applying forces on the robot
in the opposite direction of the local surface normal.
1
Video: https://tinyurl.com/OneraClimbingRobotPlan
ning
Figure 9: 3D field of surface normal vectors to the airplane
obtained through the inverse transformation of the grid N .
Figure 10: Climbing wheeled robot tracking the generated
inspection path on the surface of an aircraft, simulated in a
ROS/Gazebo environment.
For this purpose, a model of the surface normal vec-
tors of the airplane N (i, j) has been established from
a meshed model, in a similar manner to the models
R (i, j) and L(i, j). Note that N is a grid of dimen-
sions i
max
× j
max
× 3. A representation of the surface
normal vectors of the airplane is depicted in Figure 9.
In order to perform path tracking control,
the 3D position and orientation of the robot
(x
r
y
r
z
r
quat)
T
are associated with a 2D posi-
tion and orientation in the plane defined by (θ, z). The
orientation of the robot in this plane corresponds to
the projected yaw angle ψ, and its position is defined
by θ and z. The odometry data provides the position
of the robot in the 3D space, namely x
r
, y
r
and z
r
, as
well as its orientation quat parametrized as a quater-
nion. Thus, the robot’s state in the 2D plane is de-
scribed by the coordinates (θ z ψ)
T
.
This robot local planar state is determined as fol-
lows. Firstly, the unit vector ⃗v corresponding to the
robot’s orientation in the 3D space is computed using
the quat value. Let P
1,cart
be the origin of the vector⃗v
(thus P
1,cart
is located at the center of the robot in the
3D space) and let P
2,cart
be the point located at its end-
point. These two points can be rewritten in cylindrical
coordinates similarly to Section 3.2, which gives P
1,cyl
and P
2,cyl
. The coordinates of these points in the local
2D plane are P
1
= (ρ
1
,θ
1
,z
1
) and P
2
= (ρ
2
,θ
2
,z
2
),
which allows us to determine the state of the robot as:
θ
z
ψ
=
θ
1
z
1
atan2(z
2
− z
1
,ρ
2
· θ
2
− ρ
1
· θ
1
)
(7)
Due to the discontinuity at θ = ±π, the calcu-
lated value of the angle ψ can be incorrect when the
points P
1,cyl
and P
2,cyl
are located on different sides
of this boundary. To address this issue, the value of
θ
2
is adjusted within the range [−2π; +2π] based on
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications
441

θ
1
∈ [−π; +π]. The cells q = (i, j) of the precom-
puted offline global inspection path Q are converted
into waypoints with coordinates
θ
w
z
w
ρ
w
=
i · δθ j · δz R (i · δθ, j · δz)
The path tracking performed by the robot is a
waypoint-based navigation method based on a uni-
cycle model. Thus, the robot aligns itself towards
the next waypoint by adjusting its yaw angle in the
2D plane with the angular set-point ψ
s
= atan2(z
w
−
z,ρ
w
· θ
w
− ρ
·
θ) using a proportional angular con-
troller. A velocity controller is then applied once the
angular error is below a small threshold. This control
logic leads to the expected correction in the 3D space
and the simulated robot model was successfully able
to track the inspection path on the surface of the air-
craft (Figure 10).
5 CONCLUSIONS AND
PERSPECTIVES
A method for planning a covering path on a curved
surface in the context of an automated inspection mis-
sion has been proposed in this paper. A 2D un-
folded model of this surface was established using
a parametrization of an input 3D model in cylindri-
cal coordinates. It was discretized to obtain two sur-
face functions, one describing the shape of the sur-
face and the other its semantics. Inspection segments
were sampled in this 2D space, taking into account
various constraints related to the robot. A method for
decomposing this discrete space into areas has been
defined to order these segments efficiently. Connec-
tion segments have been inserted between the inspec-
tion segments and calculated to pass through locations
that minimize the robot’s efforts using a weighted A∗
search procedure. This method has been tested nu-
merically on a representative aircraft 3D mesh where
the relevance of sorting the inspection path segments
by areas was demonstrated, and in a Gazebo simula-
tion with a simplified climbing robot model.
In the context of aircraft inspection, approximating
its surface with a cylindrical parametrization presents
some limitations, e.g. to exclude the wings in the
model. It would be interesting to investigate in fu-
ture work the extension of the path planning method
to surfaces of different shapes, or the possibility of di-
viding a 3D model into multiple sub-models that can
be individually approximated by a collection of geo-
metrical primitives.
ACKNOWLEDGMENTS
This research was partially supported by DGAC
France Relance project EXAM, in the frame of the
NextGenerationEU program.
REFERENCES
Acar, E. U., Choset, H., Rizzi, A. A., Atkar, P. N., and
Hull, D. (2002). Morse decompositions for cover-
age tasks. The International Journal of Robotics Re-
search, 21(4):331–344.
Achat, S., Marzat, J., and Moras, J. (2022). Path planning
incorporating semantic information for autonomous
robot navigation. In 19th International Conference
on Informatics in Control, Automation and Robotics
(ICINCO), Lisbonne, Portugal.
Andrikopoulos, G., Papadimitriou, A., Brusell, A., and
Nikolakopoulos, G. (2019). On model-based adhesion
control of a vortex climbing robot. In IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 1460–1465.
B
¨
ahnemann, R., Lawrance, N., Chung, J. J., Pantic, M.,
Siegwart, R., and Nieto, J. (2021). Revisiting boustro-
phedon coverage path planning as a generalized trav-
eling salesman problem. In 12th International Confer-
ence on Field and Service Robotics, pages 277–290.
Bugaj, M., Nov
´
ak, A., Stelmach, A., and Lusiak, T. (2020).
Unmanned aerial vehicles and their use for aircraft
inspection. In 2020 New Trends in Civil Aviation
(NTCA), pages 45–50.
Chang, F., Chen, C.-J., and Lu, C.-J. (2004). A linear-time
component-labeling algorithm using contour tracing
technique. Computer Vision and Image Understand-
ing, 93:206–220.
Chen, H., Fuhlbrigge, T., and Li, X. (2008). Automated
industrial robot path planning for spray painting pro-
cess: A review. In IEEE International Conference on
Automation Science and Engineering, pages 522–527.
Choset, H. and Pignon, P. (1998). Coverage path planning:
The boustrophedon cellular decomposition. In Field
and service robotics, pages 203–209.
Dahiya, C. and Sangwan, S. (2018). Literature review on
travelling salesman problem. International Journal of
Research, 5:1152–1155.
Fernandez, R. F., Keller, K., and Robins, J. (2016). Design
of a system for aircraft fuselage inspection. In IEEE
Systems and Information Engineering Design Sympo-
sium, pages 283–288.
Gabriely, Y. and Rimon, E. (2001). Spanning-tree based
coverage of continuous areas by a mobile robot. An-
nals of mathematics and artificial intelligence, 31:77–
98.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
442

Galceran, E. and Carreras, M. (2013). A survey on coverage
path planning for robotics. Robotics and Autonomous
Systems, 61:1258–1276.
Hasan, K. M., Reza, K. J., et al. (2014). Path planning al-
gorithm development for autonomous vacuum cleaner
robots. In International Conference on Informatics,
Electronics & Vision (ICIEV).
Liu, Y., Zhao, W., Liu, H., Wang, Y., and Yue, X.
(2022). Coverage path planning for robotic quality
inspection with control on measurement uncertainty.
IEEE/ASME Transactions on Mechatronics, 27:3482–
3493.
Mineo, C., Pierce, S., Nicholson, I., and Cooper, I.
(2017). Introducing a novel mesh following technique
for approximation-free robotic tool path trajectories.
Journal of Computational Design and Engineering,
4:192–202.
Qin, L., Jin, Z., Suo, S., Zhang, C., Qiao, K., and Liu, J.
(2022). Design and research of a wall climbing robot
with ducted fan for aircraft appearance inspection. In
International Conference on Sensing, Measurement &
Data Analytics in the era of Artificial Intelligence (IC-
SMD).
Rai, K., Madan, L., and Anand, K. (2014). Research paper
on travelling salesman problem and its solution using
genetic algorithm. International Journal of Innovative
Research in Technology, 1(11):103–114.
S
¨
orme, J. and Edwards, T. (2018). A comparison of path
planning algorithms for robotic vacuum cleaners. In
BSc report, KTH Royal Institute of Technology.
Starbuck, B., Fornasier, A., Weiss, S., and Pradalier, C.
(2021). Consistent state estimation on manifolds for
autonomous metal structure inspection. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 10250–10256.
Wang, C., Gu, J., and Li, Z. (2019). Switching motion con-
trol of the climbing robot for aircraft skin inspection.
In IEEE International Conference on Fuzzy Systems.
Wu, H. and Tang, Q. (2023). Robotic spray painting path
planning for complex surface: boundary fitting ap-
proach. Robotica, 41(6):1794–1811.
Wu, Q., Lu, J., Zou, W., and Xu, D. (2015). Path plan-
ning for surface inspection on a robot-based scanning
system. In IEEE international conference on mecha-
tronics and automation (ICMA), pages 2284–2289.
Zelinsky, A., Jarvis, R. A., Byrne, J. C., and Yuta, S. (1993).
Planning paths of complete coverage of an unstruc-
tured environment by a mobile robot. In Proceedings
of International Conference on Advanced Robotics,
volume 13, pages 533–538.
Curved Surface Inspection by a Climbing Robot: Path Planning Approach for Aircraft Applications
443
