
Maritime Dynamic Resource Allocation and Risk Minimization Using
Visual Analytics and Elitist Multi-Objective Optimization
Mayamin Hamid Raha, Md. Abu Sayed, Monica Nicolescu, Mircea Nicolescu and Sushil Louis
Department of Computer Science and Engineering, University of Nevada, 1664 N. Virginia Street, Reno, NV 89557, U.S.A.
Keywords:
Resource Allocation, Intensity Maximization, Visualization, Risk Minimization, Threat Evaluation, Multi-
Objective Optimization, Fitness Function.
Abstract:
Enhancing the safety of protected regions around Navy vessels is one of the most challenging research topics
in maritime domains. Robust tactical resource allocation depends on understanding of how the placement,
configurations, orientations of multiple assets affect both the area and intensity of coverage around the ships.
Towards this end, we built a unique resource allocation problem where we apply a randomized genetic algo-
rithm for searching through a space of 2
144
possible parameters representing area coverage, orientation of 6
tactical assets. Our elitist genetic algorithm yielded a maximum fitness value of 90%, 98%, 100% within 50,
150 and 300 generations respectively. Moreover, we put forward a distinctive constrained dynamic resource
allocation problem specific to USS Arleigh Burke Destroyer model (DDG-51), where the assets are defenses
and coastal guards having binoculars. To solve this, we have used a cross-generational elitist selection based
evolutionary algorithm (EA) where our objective is to maximize area of coverage and minimize risk simulta-
neously. It is a non-deterministic polynomial-time hard (NP-Hard) problem which required searching through
a space of 2
48
parameters and resulted in a fitness value of 98% within 35 generations. Furthermore, we
present two novel visualization techniques addressing both types of resource allocations.
1 INTRODUCTION
In maritime domains, dealing with the wide range
of possible threats to large ships requires a strategic
placement of sensory and defensive resources (Be-
naskeur et al., 2007) . Large number of maritime
surveillance tasks are focused towards effectively op-
erating fixed and mobile surveillance assets which is
also known as resource allocation (RA) (Dridi et al.,
2012) . With dynamically evolving data about the
presence of hostile ships, there is a ever increasing
demand of intelligent systems to support in proactive
decision making through multi-level resource alloca-
tion (Mishra et al., 2015) . Radar, sonar, infrared, and
visual are some of the many sensors that are com-
monly present in Navy ships. Some of these assets
come with spherical area of coverage, whereas, some
assets have a conical area of coverage defined as a
field of view (FOV). In case of tactical assets, the se-
curity level around a ship depends on both the area
of coverage of the assets (how far it can cover) and
the efficiency or strength of coverage at various loca-
tions (intensity of coverage). While some assets have
almost the same coverage efficiency at any range or
angle from a principal axis (for conical field of view),
others have varying efficiency that decays with linear
or angular distance from the principal axis. Identify-
ing hostile vessels ahead of time (Carlson et al., 2019)
can help ships plan their trajectory accordingly and
allocate assets such that the level and range of protec-
tion around the vessel is increased. Moreover, visu-
alizing target area around ships can help to conduct
better surveillance by aiding prompt decision making
(Davis et al., 2016) . For searching through a space
of large number of solutions, evolutionary algorithms
have proven to be one of the best optimization tech-
niques where model performance is explainable and
not a black box (Grefenstette, 1993). Elitist evolu-
tionary algorithms are often preferred due to their ten-
dency of converging faster by retaining copies of best
individuals through radical recombination (Eshelman,
1991) .
Motivated by the potentials of area based intensity
maximization in maritime security enhancement and
the lack of similar research in this field, we propose
the following:
• A generalized resource allocation (GRA) prob-
lem for multiple assets based on area of coverage
54
Raha, M., Sayed, M., Nicolescu, M., Nicolescu, M. and Louis, S.
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization.
DOI: 10.5220/0012190100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 54-63
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
where the linear range of coverage, angular cover-
age range and orientations are all dynamic. These
are the parameters that are selected by our EA for
optimization. We defined 6 locations to place the
resources, any asset can be placed in any six loca-
tions provided that it maximizes area of coverage
and that location is not already occupied by an-
other asset. The set of resources and their specifi-
cations are flexible and can be changed according
to any hypothetical or real ship model.
• A visualization technique using Pygame, for area
based generalized resource allocation. Assets are
represented with triangular shapes representing
their area of coverage, and they can be placed in 6
different locations on the ship.
• A constrained dynamic resource allocation (DRA)
problem for a DDG-51 ship model where the as-
sets are 2 set of defenses with 2 different fixed
locations and 4 different possible orientations per
defense. Furthermore, the asset sets include 6
coastal guards having binoculars, who can be
placed in 16 different locations on the ship and
can have 8 different values for orientation place-
ment.
• A technique for risk profile (intensity) and area
based coverage visualization for multiple assets of
DDG-51 Navy ship using OpenCV (Figure 2).
Our work focuses on finding optimum set of as-
set allocation parameters using elitist genetic algo-
rithm and providing corresponding 2D visualization
for navy ships.
2 RELATED WORK
With growing complexity of maritime threats, allo-
cation of navy resources (sensors/defenses) is of key
interest and has many relevant applications. Some
include RA for maritime search and rescue (SAR)
(Ai et al., 2019), (Guo et al., 2019), emergency
people evacuation (Zhang et al., 2017), power al-
location of multi-satellites for maritime mobile 6G
communication (Hassan et al., 2023), straddle car-
rier scheduling in maritime container terminal at im-
port (Dkhil et al., 2018), beam scheduling problem
for multifunctional radar (Jeong et al., 2023), threat
evaluation and weapon allocation (TEWA) (Par-
adis et al., 2005), weapon-target assignment (WTA)
(Zhang et al., 2023), risk assessment (Malik et al.,
2014) and many more (Cao et al., 2022; Dridi et al.,
2012; Qian et al., 2022; Hattaway, 2008).
Recently, a rapid growth of visual analytics tools
has taken place (Stasko et al., 2007; Willems et al.,
ϴ
α
h
x
y
Figure 1: An example of generalized RA using visualiza-
tion interface of Pygame where A-F are locations for asset
placement.
2009) . Mostly, such tools offer graph visualization
(Cleveland and McGill, 1988) and coordinate plots
(Inselberg, 2009). Although these allow us to derive
better understanding of the data and aid decision mak-
ing process, it is only very recent that researchers have
started incorporating output from visualization tech-
niques in risk assessment (Malik et al., 2014).
Integration of visual analytics in maritime domain
can provide deeper insights into many problems such
as risk assessment, threat evaluation, intent recogni-
tion (Carlson et al., 2019) and resource allocation. Al-
though we see the use of visual data in various RA
problems targeted towards SAR applications (Malik
et al., 2014), there are rarely any available systems
for visualization of tactical resources (mainly sensors
and defenses) . Visualization of the level of protection
provided by various sensors and defenses following
any allocation pattern can lead to better threat eval-
uation and enhanced understanding of point and area
defense. Having data related to location of various red
ships near a blue ship can only be of little significance
in real time scenarios, where prompt decision making
is crucial. Algorithmic approach towards modeling
RA for tactical resources of navy ships can yield bet-
ter outcome due to maximum utilization of limited re-
sources and enhanced security. RA along with avail-
able visualization technique can lead to better antici-
pation of risk and threat level associated with complex
maritime scenarios. With this idea, we have defined
and solved two different RA problems for navy ships
utilizing evolutionary algorithms and visual analytics.
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization
55

+ 45
𝑜
- 45
𝑜
principal axis, defense
𝒍
𝟏
𝒍
𝟐
𝒍
𝟑
𝒍
𝟒
𝒍
𝟓
𝒍
𝟖
+ 65
𝑜
𝒍
𝟔
principal axis, coast guard with binocular
- 65
𝑜
Less protected region (in red)
representing lower intensity of coverage
Highly protected region (in green)
representing higher intensity of coverage
𝒍
𝟕
Figure 2: Tactical Asset Intensity Visualization for Risk
Minimization using OpenCV.
h1
h2
h3 h4 h5
h6
𝛼
1
𝛼
2
𝛼
3
𝛼
4
𝛼
5
𝛼
6
ϴ
1
ϴ
2
ϴ
3
ϴ
4
ϴ
5
ϴ
6
(a)
𝑂
1
𝑂
2
𝑂
3
𝑂
4
𝑂
5
𝑂
6
𝑂
7
𝑂
8
𝑙
1
𝑙
2
𝑙
3
𝑙
4
𝑙
5
𝑙
6
(b)
Figure 3: Structure of chromosome for generalized Re-
source Allocation and Multi-objective Resource Allocation
specific to DDG-51 shown in (a) and (b) respectively.
3 METHODOLOGY
In this section, we will discuss our algorithm frame-
work and its specification for GRA and MOEA for
DDG-51.
3.1 CHC Selection Based Genetic
Algorithm
Genetic algorithms (GA) differ from other search al-
gorithms due to their ability to overcome local max-
ima by starting search from a random set of solutions
(Goldberg, 1987). Instead of providing one single
solution, GAs provide a set of solutions to a given
problem (Louis and Zhao, 1995). Each of these so-
lutions contain the search parameters and these so-
lutions are called chromosomes (also known as indi-
vidual). A set of chromosomes is known as a pop-
ulation. Different sets of chromosomes create dif-
ferent set of populations over different generations.
GAs select superior individuals from parent popula-
tion through a selection procedure and retain supe-
rior individuals while introducing diversity through
crossover and mutation processes. GAs can be of
various type depending on the method of selection,
crossover and mutation. Cross-generational elitist se-
lection (CHC) is a non traditional GA (Whitley and
Sutton, 2012), which combines parent and child pop-
ulation and keeps half of the chromosomes with best
fitness values. This strategy retains the best individu-
als from one generation to another. In this way, CHC
based GAs can find solutions of very complex search
space within a few generations.
3.2 Generalized Area Coverage Based
Resource Allocation and
Visualization
We have defined the GRA as a set up where 6 assets
can be placed in 6 fixed locations (namely A, B, C,
D, E, F) of a rectangular region representing a ship
(see Figure 1). The objective to find which dynamic
asset configuration is the best fit for each of the 6
pre-defined locations provided that we are placing the
assets sequentially and one location cannot be occu-
pied by more than one asset. By best fit we refer to
the amount of area an asset covers based upon var-
ious parameters such as linear coverage (h), angular
coverage(θ) and orientation. Therefore, the asset type
is not fixed. The assets can be anything such as de-
fense, sensors, coast guards, etc. All the assets have
a FOV ranging between +60
◦
\-60
◦
, i.e., 120
◦
is the
maximum possible angular coverage for each asset.
The linear coverage range of the assets can be from
1 km to 256 km. We chose this linear range to in-
crease the complexity of search space. By orientation
(α) in GRA problem, we refer to the angle by which
an asset can rotate anticlockwise from the x axis of its
coordinate system. At first, we make all calculations
required for height, angle and orientation (h, θ and α)
considering the center of the Pygame interface as the
origin. Therefore, there is a single coordinate system
for all assets with the center of the Pygame window
as origin. Later, all calculations are performed on the
transformed coordinate system specific to each asset.
For instance, we can see the x and y axes for asset
placed in location B in Figure 1. In this case, the ori-
entation values range from 1
◦
to 360
◦
. Here, the loca-
tion (l) of the assets are static parameters. We use tri-
angular shapes to represent assets having sector-like
field of view. The heights of the triangles representing
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
56

the assets, namely h1-h6, indicate the linear coverage
of assets. The FOV angles and orientations are rep-
resented by parameters named (θ
1
- θ
6
) and (α
1
-α
6
)
respectively (see Figure 1). Therefore, the parame-
ter sets of (h, θ, α) values are defined by the search
space. For this problem we are using a chromosome
of length 144, where there are 6 height values, 6 corre-
sponding angle values and 6 different values for orien-
tations from transformed positive x axis. Our chromo-
some structure is visualized in Figure 3a. The height,
angle and orientation values have a binary encoding,
comprising of 8, 7 and 9 bits respectively. Here, all
the parameters (h, θ, α) are dynamic, thus resulting
in a huge search space. This approach makes this GA
flexible to be tuned according to any model of navy
ships with unique set of assets.
Area of Coverage Based Fitness Function. For fit-
ness function calculation, we considered the percent-
age of area covered inside a circle. For this we used
the Pygame library to create a gray color display of
size 970 x 970, where 1 pixel represents 0.5 km in
real space. We drew a 512 x 512 grid to make calcu-
lations easier. Hence, there are total 940,900 pixels in
the Pygame display interface and the whole window
represents an area of 262,144 square km. Then we
drew a circle having radius of 128 grid units where
each grid unit is equivalent to 3.78 pixels. Finally, we
placed triangles (resources) from a starting location of
positive x axis in anti-clockwise direction of each of
our six coordinates in our Pygame screen which can
be seen in Figure 1. We are considering all the tri-
angles to be isosceles triangle, since in case of ships,
any asset’s field of view is equally distributed from
principal axis of rotation. Every triangle starts from
an angle α (in Figure 3a) from the positive x axis
in anti-clockwise direction where α can have values
from 1
◦
to 360
◦
. Each isosceles triangle can have an
adjacent angle (θ) value from 1
◦
to 120
◦
and height
values (named h1-h6) ranging from 1 to 256 units (see
Figure 3a). For drawing the triangles using Pygame,
the library requires 3 coordinate points of a triangle:
2 adjacent sides of isosceles triangle have one point in
common, which give us one of the three coordinates.
We calculated the remaining coordinates of end points
of each of 3 sides of triangles by solving 3 trigono-
metric equations for each side. We considered the
trigonometric equation of a line whose perpendicu-
lar makes an angle p from the positive x axis and that
line is q angle away from positive x axis (Algorithm
1). We did this calculation to determine the orienta-
tion values and place the triangles (asset covered area)
in the Pygame visualization window using the θ and
α values which can be seen in Figure 4 and Figure
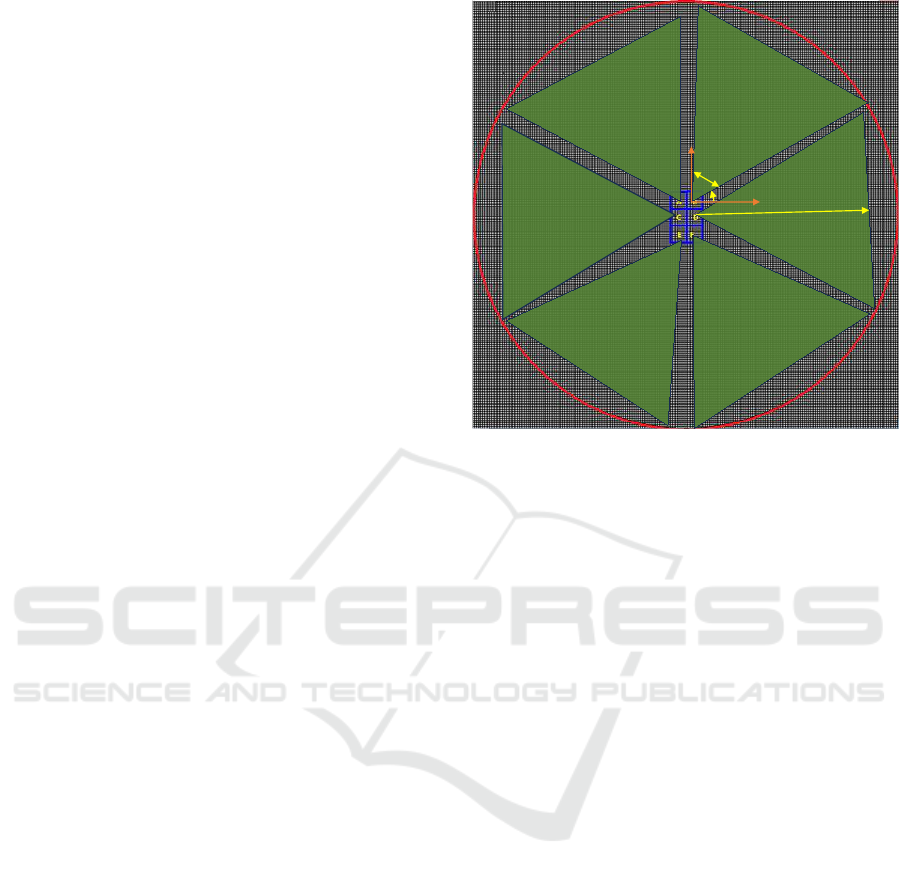
Figure 4: A sample of GRA based on solution generated
by our algorithm where height values are = [139, 178, 177,
225, 123, 217] and θ values are = [96, 115, 43, 70, 51, 2],α
values are =[235, 114, 236, 56, 346] where population size
= 50 and Generation number = 70, Area covered (inside
circle) = 75 percent.
5. In this way we do similar calculation for each tri-
angles with respect to each given location point on
a transformed coordinate system (see Algorithm 1).
The transformation is done respect to the origin of
the circle whose pixel location in the Pygame window
and our original coordinate system is (485, 485) (see
Algorithm 2). Once the coordinates of each sides end
point are found, we draw green color filled triangles
using Pygame’s gfxdraw library’s drawFilledTrigon()
function. Our algorithm is designed to deal with over-
lap of coverage of area from multiple assets using vi-
sual analytics. Since we are considering the intensity
of coverage to have the same value for each pixel irre-
spective of the number of assets that cover that area,
we used pixel-wise visual cue for calculating covered
area around ship. Once the assets are placed and vi-
sualized, our algorithm takes input from Pygame’s
visual grid and counts the number of pixels having
green color within the circular region to calculate the
effective covered area in target region (circular re-
gion). When a pixel has green color RGB value then
it is considered as covered, provided that it is within
the circumference of the circular region. This is in or-
der to compute the area that our asset placement has
covered within a certain circular boundary.
Once the coordinates of each sides end point
is found we draw green color filled triangles using
Pygame’s gfxdraw library’s drawFilledTrigon() func-
tion.
Area Covered Calculation. For area coverage cal-
culation, we calculate the number of green pixels in-
side the boundary of the circle and multiply it with
pixel size (see Equation 2). The area of circle is calcu-
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization
57

Figure 5: height1-height6 = [221, 199, 255, 130, 31, 127]
and θ1-θ6 =[37, 84, 63, 40, 73, 28], α1-α6 =[97, 239, 220,
195, 286, 215] where population size = 100 and Generation
number = 103, Area covered (inside circle) = 82 percent.
Algorithm 1: Calculates the 3 corner coordinates of each
triangle with respect to transformed coordinate system.
Input: List of heights, FOV angles and orientation
angles(q) from positive x axis in
transformed coordinate system, p angles
(the angles made by perpendiculars of each
side of triangles with positive x axis)
Result: 3 corner coordinates of a triangle in
transformed coordinate
system(x,ycoordinatevalues);
a1 = 270 + q;
a2 = q + p/2;
a3 = 270 + q + p;
foreach p in angles (where p[i] > 0 do
xcos(a1) + ysin(a1) = 0;
xcos(a2) + ysin(a2) = height;
xcos(a3) + ysin(a3) = 0;
end
lated using Equation 1, where the radius of the circle
represents 256 km according to the maximum linear
coverage range of each assets for this problem. For
calculation of area covered inside circle by triangles,
we used the Equation 2. Here, trianglePixelCount is
the number of pixels whose RGB pixel value is green
and are inside circular boundary. Pygame window
size here is 512 x 512 pixels, therefore the pixel size
is 0.73 µm. Finally, for calculation of percentage of
area covered, we use Equation 3. We can see how our
display looks with various height, theta, alpha values
in Figure 4.
CircularArea = 3.146 ∗ (radius)
2
(1)
AreaCovered = pixelSize ∗ trianglePixelCount (2)
Fitness = (AreaCovered/CircularArea)∗ 100 (3)
Algorithm 2: Calculates the 3 corner coordinates of each
triangle with respect to original coordinate system.
Input: List of 3 corner coordinates of a triangle in
transformed coordinate system, i.e. list of
3 (x,y) coordinate values and coordinate of
a given pixel location on ship’s rectangular
area
Result: 3 corner coordinates of a triangle in
original coordinate system (x,y)
coordinate values;
foreach index in range len(coordinate_solutions)
do
coordinate_solutions[index][0] =
coordinate_solutions[index[0] +
location_point[0];
coordinate_solutions[index][1] =
coordinate_solutions[index][1] +
location_point[1];
end
Algorithm 3: Calculates the fitness value for each member
of chromosome.
Input : List principal axis and locations in form of
pixel coordinates of all 8 assets,
FOV_angle
Result: combined fitness value of a pixel resulting
from all the allocated assets;
asset_coverage = 0
for i = 0 to 6 do
binocular =
b_coordinate.append(b_location[i])
for i in range width do
for j in range height do
angular_distance = Calculate β from
each principal axis;
if angular_distance <= FOV_angle
then
asset_coverage + =
Intensity(eDistance, minDist,
maxDist, angular_coverage, β,
maximum_angularRange,
mapping,
intensity_distribution_pattern,
c);
else
return 0.0;
return asset_coverage;
3.3 Intensity and Area of Coverage
Based Resource Allocation
This RA approach is based on constraints imposed by
the assets of DDG-51 where we are considering allo-
cation of 2 defenses having a maximum linear cov-
erage range of 14 km and 6 coastal guards having
binoculars represented with visual sensors having a
maximum linear coverage range of 20 km. For the de-
fenses, one pixel represents 1 km and for visual sen-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
58

sors each pixel represents 1.5 km. The locations for
defenses are fixed and each of them can have 4 pre-
defined different orientations. The locations of the vi-
sual sensors are dynamic and 16 different locations
have been defined along the borders of the ship model.
The coastal guards can be placed at any of these 16 lo-
cations and each of these mobile assets can have 8 dif-
ferent orientations. Here we have manually defined 8
possible orientations values that each of these coastal
guards can have in order to reduce the complexity of
search space. The GA searches through each of these
8 different possible orientations for coastal guard as-
sets. Our chromosome has all binary values. It con-
tains 8 different orientation values where the first two
are for defenses (2 bits each), the next 6 values are
for orientation of visual sensors (3 bits each), and the
succeeding 6 values (4 bits each) represent the loca-
tion of the visual sensors. In this case there are fewer
parameters compared to the generalized GA for area
based RA, since specific model of ships have particu-
lar range of orientations and distance coverage, which
results in reduced search space.
Multi-Objective GA Fitness Function for DDG-51.
We have taken into consideration the fact that the in-
tensity of coverage from each assets is not of equal
magnitude in every location around the ship. Inten-
sity values degrade with distance and angle from the
direction where it is pointed (also known as principal
axis). In order to model the distribution of intensity
based on linear distance, orientation and area of cov-
erage, we built a visual analytic algorithm, based on
OpenCV, and we designed a set of intensity deteriora-
tion functions to achieve this effect (see Algorithm 4).
This enables us to know the combined effect of orien-
tations and allocations of multiple static and mobile
assets at any point of time and can be used in fitness
function for our GA since it can easily tell which area
is comparatively less covered by the current set of as-
set allocations (see Algorithm 3). In Algorithms 3
and 4, the variable eDistance refers to the euclidean
distance of a pixel from a principal axis (PA) of an
asset, minDist refers to the minimum coverage range
of an asset, maxDist refers to the maximum coverage
range of asset, β refers to the angular distance of a
pixel from PA of an asset, mapping refers to the scal-
ing parameter, and b_coordinate refers to the location
of coast guards with binoculars.
In our fitness function, we have two main objec-
tives:
• Maximize the area covered by assets around Navy
ships and
• Maximize the strength of coverage, which implies
reduced risk in the protected zone.
The summation of pixel values having combined in-
tensity values from multiple assets help us meet both
of our objectives simultaneously, i.e., higher intensity
value of the entire image represents more area be-
ing covered along with higher strength of coverage.
Both pixel intensity values and number of pixels hav-
ing an intensity of coverage value greater than zero
contribute in overall fitness value calculation of each
image generated by our visualization.
The way we achieve this effect, is by searching
through each pixel of image generated by our visu-
alization technique and assigning an intensity value
to it from every asset. We add intensity values of all
pixels in the image and assign that value and a fitness
value for a particular set of allocation parameters gen-
erated by our multi-objective evolutionary algorithm
(see Algorithm 3).
In order to further optimize the calculations in fit-
ness function, for every pixel of the image generated
by our visual analytic algorithm we check its angu-
lar distance from principal axis of each asset and cal-
culate fitness value for it only if it falls within the
range of coverage specific to each asset (see Algo-
rithm 3). In our visual analytic helper functions we
are using inverse normalization to model the change
of intensity value with respect to distance for visual
sensors of binocular and piece-wise function for the
same in case of defenses. We refer to this as in-
tensity_distribution_pattern in Algorithm 3 and Al-
gorithm 4. Variable c is a hyper parameter with val-
ues within a range of .01 to 1. The FOV_angle vari-
able represents the maximum field of view a specific
asset can have, for example: for coastal guards the
FOV_angle is 130
◦
(+65
◦
\-65
◦
) and for defenses the
FOV_angle is 90
◦
(+45
◦
\-45
◦
).
Additionally, we also have built functions to
model the intensity of coverage for other possible as-
sets such as radar, sonar sensors with spherical or cir-
cular area of coverage (see Algorithm 4). Although
we only display visualization from defenses and con-
ical FOV assets, spherical assets can also be repre-
sented using our Algorithm 4. Radar and Sonar sen-
sors differ at the rate at which their intensities decays
with linear and angular distance, due to which the in-
tensity_distribution_pattern variable is set to two dif-
ferent types, "radar_exponent" and "sonar_exponent"
respectively.
We calculate the final intensity of coverage of a
pixel by combining the value of linear intensity (based
on euclidean distance from principal axis) and angu-
lar intensity (using Equation 4). We calculate the in-
tensity of coverage value of a pixel only when β (the
angular distance from principal axis of an asset) falls
within the maximum angular coverage region which
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization
59

is unique to each asset. To compute β we use vector
dot product and calculate the cosine of the angle by
dividing the dot product of two vectors representing
line segments by the product of their magnitudes (see
Equation 4).
Sector_Intensity = 1 − (2 ∗ β/(max_coverage) (4)
When a pixel falls within β range, then for calcula-
tion of intensity we follow Algorithm 4: this returns
an intensity value corresponding to each pixel, which
in turn is used by Algorithm 3 to iterate through all
pixels of a visualization and calculate a fitness value
for a chromosome.
Algorithm 4: Calculating the intensity of a pixel with
respect to an asset.
Input : eDistance, minDist, maxDist,
angular_coverage, β,
maximum_angularRange,
mapping,intensity_distribution_pattern,c
Result: intensity value of a pixel resulting from
one asset placed at a particular location;
if eDistance < minDist or eDistance > maxDist
then
return 0;
if intensity_distribution_pattern = "piece_wise"
then
if eDistance > 0 and eDistance < 0.025 *
maxDist then
retrun 0.9;
else if eDistance >= 0.025 * maxDist and
eDistance < 0.045 * maxDist then
return 0.7;
else if eDistance >= 0.045 * maxDist and
eDistance < 0.2 * maxDist then
retrun 0.2;
else
return 0.05;
else if intensity_distribution_pattern = "inv_norm"
then
return 1 - ((eDistance -
minDist)/(maxDist-minDist);
else if intensity_distribution_pattern =
"radar_exponent" then
return 1/e
(c∗eDistance)/(maxDist−minDist)
;
else if intensity_distribution_pattern =
"sonar_exponent" then
return 1/e
(c∗(eDistance−minDist))
;
else
return 0;
3.4 Common Parameters Used in both
Approaches
Through experimentation we found that probability
of mutation of 0.05 and probability of cross over of
0.9 works best for our generalized resource alloca-
tion and DDG-51 specific resource allocation prob-
(a)
(b)
(c)
Figure 6: Average of best, mean and worst fitness curves for
RA of DDG-51 ship for 35, 70 and 150 generations in (a),
(b) and (c) respectively.
lem. For the GAs used to address both problems we
used CHC-based selection with µ value of 2, where µ
refers to the number of parents selected by the GA at
a time before crossover and mutation takes place. We
used 30 different random seeds and we averaged the
minimum, maximum and average fitness of our GA
in every generation over these 30 random seeds. We
did this in order to confirm that the result we obtained
was not an outcome of random initial set of chromo-
somes that the GA started working with. This can be
seen in Figures 6a, 6b and 6c.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
60

Table 1: Parameters and Maximum Fitness values (Area covered) for generalized RA having dynamic parameters.
Pop &
Gen No.
Crossover
and
Mutation
Rate
Static
parameters
Dynamic
parameters
Fitness
(%)
50 , 37 0.9, 0.05 l h,θ,α 69
50 , 70 0.9, 0.05 l h,θ,α 75
100 , 103 0.9, 0.05 l h,θ,α 82
100 , 150 0.9, 0.05 l h,θ,α 98
200 , 300 0.9, 0.05 l h,θ,α 100
300 , 450 0.9, 0.05 l h,θ,α 100
Table 2: Parameters and Maximum Fitness values multi-objective RA.
Pop &
Gen No.
Crossover
Rate
Mutation
Rate
Static
parameters
Dynamic
parameters
Fitness(%)
26, 39 0.9 0.05 h,θ α, l 97
50, 75 0.9 0.05 h,θ α, l 97
100, 150 0.9 0.05 h,θ α, l 98
4 EXPERIMENT
In this section, we evaluate the performance of our
generalized RA and DDG-51 specific constrained RA
by varying the hyper parameter values. We ran our
evolutionary algorithm for various number of gener-
ations to see if it has an impact on the results (Table
1). For all the experiments we used a hybrid computer
having Intel(R) Core(TM) i9-9900 KF processor, 32
GB RAM and NVDIA GeFORCE RTX 3060 GPU.
In Table 1, we show the population and generation
number used by our GRA algorithm, along with the
crossover-mutation rates, dynamic parameters, and
best fitness value. We ran each of our GA iteration
through 30 random seeds and average the best, min-
imum and average fitness value per iteration to en-
sure that GA results are not some random results in-
fluenced by the initial set of chromosomes. For each
random seed we take the best fitness values and av-
erage them for each generation. In the best fitness
column we indicate the maximum value of those aver-
ages from generation number 0 to generation number
n.
Parameter l refers to the locations on the ship
where asset can be placed. The dynamic parameters
h, θ, α represents the linear coverage, field of view
angles and orientations of assets respectively. From
Table 1 it is evident that running the algorithm for
higher number of generations yields better fitness val-
ues. Finally, for 300 generations with a population
size of 200, leads towards finding set of parameters
that give 100% of area coverage. We infer that finding
a set of chromosomes that yield 100% fitness value
within relatively small number of generations for such
a large search space might have been possible due to
the simplicity of constraints imposed upon the param-
eters. For instance, we represented the area of cover-
age of each resource to be simply triangular (which is
not the case with real life assets), and the whole grid
size was 512 x 512 pixels only. If we took a greater
Pygame window size with more complex representa-
tion of sensor coverage then GA might have not found
a set of solution resulting in 100% area of coverage
within 300 generation only.
To explore the applicability of our approach for
real life ships with dynamic location parameters, we
also experiment with the MOEA that we built for
DDG-51 that takes into account the specific linear, an-
gular coverage ranges of its resources along with the
constraints imposed upon it. From Table 2, we see
that running our MOEA for greater number of gen-
erations with larger population size does not have a
significant impact on our fitness value. This is due to
the fact that in our second experiment we have built
an algorithm that offers an enhanced representation
of area of coverage in addition to intensity of cover-
age. Our elitist selection based GA searches through
possible combinations of orientations and locations.
Since DRA has constraints on each asset’s linear and
angular coverage ranges, these fall under the category
of static parameter. Orientation and location are dy-
namic parameters in this case.
5 RESULTS
For the generalized RA, we used population sizes
of 50 and 100 with varying numbers of generations
(Table1). From Table 1 we can see that when we let
the generalized RA run for more number of genera-
tions we obtained better results. Even for a general-
ized version of the problem with 2
144
parameters, our
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization
61

elitist evolutionary algorithm was able to find good re-
source allocations parameters within 150 generations
(Table1). For MOEA, upon using population size of
26, 50 and 100 for generation number 39, 75 and 150
respectively as hyper parameters for our MOEA (see
Table 2), we found that within around 25 generations
the fitness values converge to 98%. These sets of solu-
tions can now be used for allocating resources on Ar-
leigh Bruke Destroyer ship for maximization of area
of coverage and risk minimization (meaning overall
higher strength of coverage). We have calculated av-
erage of best, mean and and worst fitness across 30
random seeds for each generations and noticed that
the mean fitness value starts from 40% fitness value
and reaches a value of 80% within less than 10 gen-
erations and by 25 generations it finds the optimum
set of solutions. Maximum fitness starts somewhere
around 70% and reaches 96% fitness values within
less than 10 generations.
6 CONCLUSION
We formulated two novel resource allocation (RA)
problems for navy ships. The generalized version
of RA focuses on maximization of area of coverage
around ships and finds solutions having 98% area cov-
erage within a given circular boundary. The second
version of the RA problem was defined considering a
DDG-51 ship’s dimensions and ranges of its available
resources. We found that our optimization approach
was able to find solutions representing the location
and orientation of the resources ensuring 98% risk
minimization and area of coverage. Our novel visual
analytic algorithm is capable of generating visualiza-
tion of combined intensity of coverage also known
as heatmaps around DDG-51 at any point of time.
Moreover, tuning the GA for incorporating data based
on location of multiple ships in real time, can lead
to resource allocation in real time and parallel pro-
cessing can help with generating faster outputs. This
opens doors for future works related to integrating
dynamic threatmaps with our multi-objective evolu-
tionary algorithm to enhance the level of protection
around ships in multi-agent scenarios (MAS).
ACKNOWLEDGMENTS
This work has been supported by the Office of Naval
Research award N00014-21-1-2234.
REFERENCES
Ai, B., Li, B., Gao, S., Xu, J., and Shang, H. (2019). An in-
telligent decision algorithm for the generation of mar-
itime search and rescue emergency response plans.
IEEE Access, 7:155835–155850.
Benaskeur, A., Bossé, É., and Blodgett, D. (2007). Com-
bat resource allocation planning in naval engage-
ments. Technical report, DEFENCE RESEARCH
AND DEVELOPMENT CANADA VALCARTIER
(QUEBEC).
Cao, X., Zhang, H., and Peng, M. (2022). Collaborative
multiple access and energy-efficient resource alloca-
tion in distributed maritime wireless networks. China
Communications, 19(4):137–153.
Carlson, L., Navalta, D., Nicolescu, M., Nicolescu, M.,
and Woodward, G. (2019). Multinomial hmms for in-
tent recognition in maritime domains. In Proceedings
of the 18th International Conference on Autonomous
Agents and MultiAgent Systems, pages 1856–1858.
Cleveland, W. S. and McGill, M. (1988). Dynamic graphics
for statistics wadsworth & brooks. Pacific Grove, CA.
Davis, A., Vincent, C., Otenti, N., and Parolin, A. (2016).
Aerial precision 3-d ground surveillance and local-
ization using a network of inexpensive, disposable,
image-based sensors. In 2016 IEEE Symposium on
Technologies for Homeland Security (HST), pages 1–
6. IEEE.
Dkhil, H., Yassine, A., and Chabchoub, H. (2018). Multi-
objective optimization of the integrated problem of lo-
cation assignment and straddle carrier scheduling in
maritime container terminal at import. Journal of the
Operational Research Society, 69(2):247–269.
Dridi, O., Krichen, S., and Guitouni, A. (2012). A multi-
objective optimization approach for resource assign-
ment and task scheduling problem: Application to
maritime domain awareness. In 2012 IEEE Congress
on Evolutionary Computation, pages 1–8. IEEE.
Eshelman, L. J. (1991). The chc adaptive search algorithm:
How to have safe search when engaging in nontradi-
tional genetic recombination. In Foundations of ge-
netic algorithms, volume 1, pages 265–283. Elsevier.
Goldberg, D. E. (1987). Simple genetic algorithms and the
minimal, deceptive problem. Genetic algorithms and
simulated annealing, pages 74–88.
Grefenstette, J. J. (1993). Genetic algorithms and machine
learning. In Proceedings of the sixth annual confer-
ence on Computational learning theory, pages 3–4.
Guo, Y., Ye, Y., Yang, Q., and Yang, K. (2019). A multi-
objective inlp model of sustainable resource allocation
for long-range maritime search and rescue. Sustain-
ability, 11(3):929.
Hassan, S. S., Park, S.-B., Huh, E.-N., and Hong, C. S.
(2023). Seamless and intelligent resource allocation
in 6g maritime networks framework via deep rein-
forcement learning. In 2023 International Conference
on Information Networking (ICOIN), pages 505–510.
IEEE.
Hattaway, S. B. (2008). Adapting the dynamic allocation
of fires and sensors (dafs) model for use in maritime
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
62

combat analysis. Technical report, NAVAL POST-
GRADUATE SCHOOL MONTEREY CA.
Inselberg, A. (2009). Parallel coordinates: intelligent
multidimensional visualization. Intelligent Computer
Graphics 2009, pages 123–141.
Jeong, N.-H., Kim, M., Choi, J.-H., and Kim, K.-T. (2023).
Beam scheduling of maritime multifunctional radar
based on binary integration. IEEE Access.
Louis, S. J. and Zhao, F. (1995). Domain knowledge for
genetic algorithms. International Journal of Expert
Systems Research and Applications, 8(3):195–212.
Malik, A., Maciejewski, R., Jang, Y., Oliveros, S., Yang, Y.,
Maule, B., White, M., and Ebert, D. S. (2014). A vi-
sual analytics process for maritime response, resource
allocation and risk assessment. Information Visualiza-
tion, 13(2):93–110.
Mishra, M., Sidoti, D., Ayala, D. F. M., Han, X., Avvari,
G. V., Zhang, L., Pattipati, K. R., An, W., Hansen,
J. A., and Kleinman, D. L. (2015). Dynamic resource
management and information integration for proac-
tive decision support and planning. In 2015 18th in-
ternational conference on information fusion (fusion),
pages 295–302. IEEE.
Paradis, S., Benaskeur, A., Oxenham, M., and Cutler, P.
(2005). Threat evaluation and weapons allocation in
network-centric warfare. In 2005 7th international
conference on information fusion, volume 2, pages 8–
pp. IEEE.
Qian, L. P., Zhang, H., Wang, Q., Wu, Y., and Lin,
B. (2022). Joint multi-domain resource allocation
and trajectory optimization in uav-assisted maritime
iot networks. IEEE Internet of Things Journal,
10(1):539–552.
Stasko, J., Gorg, C., Liu, Z., and Singhal, K. (2007). Jig-
saw: supporting investigative analysis through inter-
active visualization. In 2007 IEEE Symposium on Vi-
sual Analytics Science and Technology, pages 131–
138. IEEE.
Whitley, D. and Sutton, A. M. (2012). Genetic algorithms-a
survey of models and methods. In Handbook of nat-
ural computing, pages 637–671. Springer Berlin Hei-
delberg.
Willems, N., Van De Wetering, H., and Van Wijk, J. J.
(2009). Visualization of vessel movements. In Com-
puter Graphics Forum, volume 28, pages 959–966.
Wiley Online Library.
Zhang, J., Kong, M., Zhang, G., and Huang, Y. (2023).
Weapon–target assignment using a whale optimiza-
tion algorithm. International Journal of Computa-
tional Intelligence Systems, 16(1):62.
Zhang, W., Yan, X., and Yang, J. (2017). Optimized mar-
itime emergency resource allocation under dynamic
demand. PloS one, 12(12):e0189411.
Maritime Dynamic Resource Allocation and Risk Minimization Using Visual Analytics and Elitist Multi-Objective Optimization
63
