
Hybrid Training to Generate Robust Behaviour for
Swarm Robotics Tasks
Pedro Romano
1,3
, Lu
´
ıs Nunes
1,2 a
and Sancho Oliveira
1,2,3 b
1
Iscte - Instituto Universit
´
ario de Lisboa, Av. Forc¸as Armadas, Lisboa, Portugal
2
ISTAR Iscte, Lisboa, Portugal
3
Instituto de Telecomunicac¸
˜
oes, IT Iscte, Lisboa, Portugal
Keywords:
Evolutionary Robotics, Multirobot Systems, Cooperation, Perception, Object Identification, Artificial
Intelligence.
Abstract:
Training of robotic swarms is usually done for a specific task and environment. The more specific the train-
ing is, the more the likelihood of reaching a good performance. Still, flexibility and robustness are essential
for autonomy, enabling the robots to adapt to different environments. In this work, we study and compare
approaches to robust training of a small simulated swarm on a task of cooperative identification of moving
objects. Controllers are obtained via evolutionary methods. The main contribution is the test of the effec-
tiveness of training in multiple environments: simplified versions of terrain, marine and aerial environments,
as well as on ideal, noisy and hybrid (mixed environment) scenarios. Results show that controllers can be
generated for each of these scenarios, but, contrary to expectations, hybrid evolution and noisy training do not,
in general, generate better controllers for the different scenarios. Nevertheless, the hybrid controller reaches a
performance level par with specialized controllers in several scenarios, and can be considered a more robust
solution.
1 INTRODUCTION
The penetration of fully autonomous robots in society
is still scarce. One of the key factors of this chal-
lenge is environment perception. In order to behave
autonomously, the robot needs to make a wide variety
of decisions that have to be supported by a great un-
derstanding of the environment surrounding it (Fitz-
patrick, 2003).
”Machine Perception” is a term used to describe
the capability of a machine to interpret data much like
humans use their senses to perceive the world around
it. A good level of perception will ultimately boost
the level of situation awareness, greatly improving the
chances of making a good decision.
Classic methods for synthesizing robotic con-
trollers are based on the manual specification of its
behavior. For greater levels of complexity, man-
ually specifying all possible use cases and scenar-
ios a robot may encounter gets specially demanding.
This has motivated the application of artificial intelli-
a
https://orcid.org/0000-0001-7072-0925
b
https://orcid.org/0000-0003-1391-3194
gence (AI) and evolutionary computation (a subfield
of AI and machine learning) to synthesize robotic
controllers. This approach started having promising
results (Lewis et al., 1992; Cliff et al., 1993) as the
evolutionary robotics (ER) field of study started to
gain shape. Using this approach, an initial random
controller is optimized through several generations.
At each generation, a population of candidate solu-
tions is tested and the best performing solutions are
mutated, crossed-over and passed on to the next gen-
eration. With this method, we get an incrementally
better controller at each generation as we let evolu-
tion take care of the controller specification.
A common framework for robotic controllers is an
artificial neural network (ANN). This approach is in-
spired by the way the human brain works, with com-
puter models of axons and neurons. One of the main
advantages of the ANN framework applied to robotic
controllers is the resistance to noise (Jim et al., 1995),
introduced for example by the normal imperfections
of real-world hardware (sensors). The ANN frame-
work is also a natural fit for robotics, with its layer
architecture allowing for a direct mapping of the sen-
sors to the input layer and the actuators to the output
Romano, P., Nunes, L. and Oliveira, S.
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks.
DOI: 10.5220/0012193300003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 265-277
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
265

layer. Sensor activation in ANN’s are usually repre-
sented by a value in specific range, for example [0,1].
Environment perception in robotics is a natural
evolution driven by the need to make robots ever more
autonomous and intelligent. Different approaches on
this subject have been studied over the years, based on
voice (Fitzpatrick, 2003), vision (Merino et al., 2006;
Spaan, 2010; Spaan et al., 2010) and touch (Le et al.,
2010) to perceive the environment.
Investigation on this subject although very sparse
in the means of perceiving and acting upon the envi-
ronment, concerns mostly terrain environments. With
the proliferation of devices like drones and the expan-
sion of robotic applications, it’s important to explore
different environments and create solutions that can
be applied to multiple scenarios. In particular, this
work will focus on simulating conditions characteris-
tic of terrain, aerial and marine environments and the
challenges that arise in both developing cooperative
active perception capabilities for swarms that are scal-
able to multiple environments and the new challenges
introduced by each of the environments’ singularities.
In the scope of this article, perceiving the environ-
ment can be described as the identification of objects,
its features and further classification. Upon the results
of that classification, the robot can act on the environ-
ment, changing its state. The perception of each robot
is shared with the team-members in the field of sight.
This aggregates as a cooperative active perception ap-
proach to swarm robotics.
This task is required for complex environments
where observations must be verified by several
sources for structures that have a much larger scale
than the sensors, or that need to be sensed in differ-
ent wavelengths, or using different types of sensors,
thus requiring the contribution of different elements
of the swarm each, identifying a specific set of char-
acteristics, to validate the identification. In this case
the problem was simplified to sets of different color
that had to be observed at the same time and commu-
nicated to the peers.
We will focus in a task where a swarm of robots
navigates through an environment crossed by uniden-
tified objects. These objects carry a set of features,
each of which can only be observed from a different
viewpoint. The robots have three goals:
1. Identifying all the features of the objects
2. Catching the objects that fall in a certain category
defined by the presence of a specific set of fea-
tures.
3. Keeping a formation like distribution on the envi-
ronment, simulating a patrolling behavior inside
the arena.
Although collective object identification is not a novel
issue, the introduction of marine and aerial singular-
ities and the expectation of creating an environment
independent solution was not approached with depth
in previous studies and can have relevant applications,
from marine surveillance operations to aerial forest
fires detection.
In summary, the key objectives are:
1. Develop a cooperative active perception approach
that is scalable to different types of environments
and its singularities.
2. The demonstration of the approach successfully
working on a simulation environment with known
real-world transferability (Duarte et al., 2012).
The main contributions are:
1. The assessment of the results in evolving a solu-
tion to a new learning task, suited to test coopera-
tive perception problems.
2. The evaluation of techniques to evolve more ro-
bust solutions that adapt to different environ-
ments.
2 RELATED WORK
Sensing the environment is one of the key features
to enable a fully autonomous behavior. To success-
fully develop a controller with these capabilities, sev-
eral problems need to be considered, in multiple ar-
eas: environment perception, object recognition and
computer vision.
In this section, we start with an overview of ER,
the technique that will be used in the synthesis of the
robotic controllers developed throughout this study
and we review various approaches studied for solving
the cooperative active perception challenges in swarm
robotics for autonomous robots.
2.1 Evolutionary Robotics
Evolutionary computation is a sub-field of artificial
intelligence in which evolutionary algorithms (EAs)
are used. These algorithms are inspired on biologi-
cal mechanisms, following the same principles as the
natural evolution described by Darwin. The fitness
function plays one of the most important roles in the
evolution, defining the balance of the objectives to be
reached in order to get the most adequate solution af-
ter a couple generations.
ANNs are the most common framework of ER
controllers. This approach is inspired by the way the
human brain processes information, like biological
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
266

neurons (McCulloch and Pitts, 1943), with nervous
activities, neural events and relations being described
in terms of propositional logic.
A typical neural network includes five compo-
nents: (i) the input layer, (ii) the hidden layer, (iii) the
output layer, (iv) the weighted connections between
each of the previous components and (v) the activa-
tion function that converts the input to the output in
each of the nodes (neurons). The weighted connec-
tions as well as the activation function for the neu-
rons are the main parameters that define an abstract
ANN framework to solve a concrete problem. When
EAs are used, these parameters are obtained via the
global optimization methods characteristic of this ap-
proach. This process replaces the manual specifica-
tion of the solution and it is the main advantage of
using this method.
Early approaches were often based on a spe-
cific type of ANN, a discrete time neural network.
Continuous-time recurrent neural networks (CTRNN)
were later introduced by Joseph Chen in 1998 with
appealing results (Chen and Wermter, 1998), filling
the gap of the discrete time neural network’s lack of
temporal dynamics, like short term memory.
ER comes as a natural concretization of EAs to
synthesize robotic controllers. These methodologies
started emerging in the 1990’s (Lewis et al., 1992;
Cliff et al., 1993). Even when the fitness function
didn’t imply certain attributes, the evolution devel-
oped those capabilities to solve the task. The authors
consider the results sufficiently promising of future
success in the area.
Although the approach has proven successfully
in evolving creative solutions for simple behaviors
like foraging, formation, aggregation, etc, one of the
biggest challenges in the area is scaling up the ap-
proach to more complex tasks, mainly due to the boot-
strapping problem, where the goal is so hard/distant
that all individuals in the first generation perform
equally bad, causing a slow start of the evolution
process. Transferring the robotic controllers from
simulation to real environments (crossing the reality
gap) is another big challenge, with proposed solu-
tions based on sensors, noise and real-world error es-
timation (Angelo Cangelosi, Domenico Parisi, 1994;
Jakobi et al., 1995; Hartland and Bred
`
eche, 2006).
In 2007, M. Eaton presents one of the first applica-
tion of EAs to develop complex moving patterns of a
humanoid robot (Eaton, 2007) and successfully trans-
fers the solution to real hardware.
Miguel Duarte conducted a study (Duarte et al.,
2012) that introduced a novel methodology for de-
veloping controllers for complex tasks: recursively
splitting them into simpler tasks until these are sim-
ple enough to be evolved; controllers to manage the
activation of these tasks are also evolved. Then, a
tree-like composition of simple tasks and its activa-
tion controllers make up the solution for the initial
complex task.
2.2 Cooperative Active Perception
As referred by Paul Fitzpatrick in (Fitzpatrick, 2003),
it is difficult to achieve robust machine perception, but
doing so is the key to intelligent behavior. The author
also defends an active perception approach, as fig-
ure/ground separation is difficult for computer vision.
This author conducted studies using active vision and
active sensing for object segmentation, object recog-
nition and orientation sensitivity.
In 2006, Lu
´
ıs Merino (Merino et al., 2006) used a
cooperative perception system for GPS-equipped Un-
manned Aerial Vehicles (UAV)’s to detect forest fires,
where active vision played the most important role. A
statistical framework is used to reduce the uncertainty
of the global objective (the fire position) taking into
account each team-member distinct sensor readings
and their uncertainty. This approach provides a way
to exploit complementarities of different UAV with
different attributes and sensors.
The foundation of all this process is profoundly
linked to a robust perception, as such, correctly iden-
tifying objects. As stated by Q. V. Le in (Le et al.,
2010), angles in which objects can be viewed are the
main variable to increase likeliness of identification.
This study produces great results in object identifica-
tion as the robot is capable of observing the object
in many angles until certainty is reached, and was
proven to be better than passive observation and ran-
dom manipulation.
To drive the robot’s decision making based on an
incomplete and noisy perception is another challenge
described in 2010 by Matthijs T.J. Spaan in (Spaan,
2010) and (Spaan et al., 2010). The authors pro-
pose a Partially Observable Markov Decision Pro-
cess (POMDP) to develop an integrated decision-
theoretic approach of cooperative active perception,
as POMDPs “offer a strong mathematical framework
for sequential decision making under uncertainty, ex-
plicitly modeling the imperfect sensing and actuation
capabilities of the overall system.”. Later in 2014, the
authors introduced a new type of POMDP, POMDP-
IR (Information Reward), that extends the solution
with actions that return information rewards (Spaan
et al., 2014).
Another robot control approach for a perception-
driven swarm is presented by Aamir Ahmad in 2013
(Ahmad et al., 2013), where the author proposed and
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
267

implemented a method for a perception-driven mul-
tirobot formation control, with a weighted summed
term cost function to control multiple objectives.
This study was successful in demonstrating that the
authors’ approach enables a team of homogeneous
robots to minimize the uncertainty of a tracked ob-
ject while satisfying other criteria such as keeping a
formation. The approach consists in integrating two
main modules, a controller and an estimator.
Seong-Woo Kim states that fusing data from re-
mote sensors has various challenges (Kim et al.,
2015). The author focuses on the map merging prob-
lem and sensor multimodality between swarm mem-
bers to successfully extend perception range beyond
that of each member’s sensors. Compared with co-
operative driving without perception sharing, his ap-
proach was proven better at assisting driving deci-
sions in complex traffic situations. The author pro-
poses triangulation and map reckoning to get the rel-
ative pose of the nodes allowing the information to be
properly fused. The approach assumes no common
coordinate system making it more robust.
In 2015, Tiago Rodrigues addressed the sensor
sharing challenges as well. In (Rodrigues et al., 2015)
the author proposes local communication to share
sensor information between neighbors to overcome
constraints of each member’s local sensors. Triangu-
lation is used to georeference the tracked object. The
proposed approach is transparent to the controller,
working as a collective sensor. This scenario was able
to achieve a much better performance than classic lo-
cal sensors.
These techniques present a diverse contribution in
terms of the robotic controllers used, and the sensing
and actuating capabilities. In most of the cited work,
active vision played the central role of the approach
(Fitzpatrick, 2003; Merino et al., 2006; Le et al.,
2010). In (Merino et al., 2006), a statistical frame-
work is used in the controllers to estimate the target
position, and perception with heterogeneous teams is
tested. In (Spaan et al., 2010; Spaan, 2010; Spaan
et al., 2014), POMDP’s were used to model decision
making under uncertainty (good for noisy percep-
tions). The control of multiple objectives in a robotic
solution is presented in (Ahmad et al., 2013). Fusing
data sensed between multiple nodes also poses chal-
lenges studied in (Kim et al., 2015), and (Rodrigues
et al., 2015) presents a shared sensor solution to the
same problem.
The studies presented above develop and test per-
ception solutions centered in the linear terrain en-
vironment, and the development of cooperative ac-
tive perception systems using ER was not approached
with depth. The work presented in this study differs
in proposing a generic solution scalable to environ-
ments with different characteristics and overcoming
the challenges of the environments’ singularities, us-
ing ER techniques.
3 METHODOLOGY
We will now proceed to describe an approach for a
swarm robotics control system capable of collectively
identifying objects and making decisions based on the
identification. It’s a common approach in robotic per-
ception to unfold the identification of objects as the
identification of specific features that build to a known
object or class of objects (Fitzpatrick, 2003; Le et al.,
2010). Our approach follows that direction: the iden-
tification of an object is completed when all its key
features are seen by at least one of the robots in the
team. Those features can be sensed: (i) directly by
each team member using its local sensor and (ii) indi-
rectly through the shared sensor that allows each robot
to sense object features being seen by the teammates
in sight. From the controller’s point of view, there is
no distinction between the local and the shared sens-
ing of a feature.
In this work, the objects and its features serve as
a conceptual representation of any given category of
object and its features, respectively.
We’ll use a task in which a team of robots must
collectively identify a set of objects that pass by, and
catch the ones that fall into a certain category (have a
specific set of features).
For our experiments, we will use JBotEvolver
(Duarte et al., 2014) , a Java-based open-source neu-
roevolution framework and versatile simulation plat-
form for education and research-driven experiments
in ER.
3.1 Experimental Setup
To conduct our experiments, 8 circular robots with a
radius of 5 cm are placed in a 4x4 m bounded envi-
ronment. The unidentified objects have a 10 cm ra-
dius (twice the size of the robots), are generated in
intervals of 500 time steps (50 seconds) and can ap-
pear from any side of the arena, moving to the oppo-
site side. In 30% of cases, two objects will be on the
arena at the same time, increasing the identification
complexity; in the remainder 70% of cases only one
object is inside the arena at the same time. The initial
position of the object is randomly assigned when only
one object is on the arena at a time and fixed on the
bottom and top or left and right portions of the arena
when two objects are on the arena at the same time.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
268

Having two objects inside the arena at the same time
should force the robots to separate in groups to pro-
ceed with the identification. Object speed is variable,
assigned to each object at the moment of creation and
corresponding to a random speed between 0.15 and
0.35 cm/s, drawn from a uniform distribution.
Each object carries 4 features distributed around
the 4 quadrants of the object’s circular perimeter. In
the scope of this study, object features are repre-
sented by colors. To simulate the complexity asso-
ciated with large objects identification (objects bigger
than robots) and scale the approach to multiple ob-
ject sizes, each robot can only see one feature at a
time. With this limitation, cooperation is needed to
sense all the features and proceed with the identifica-
tion. The key is for the robots to position themselves
around an object so that each one is situated in a van-
tage point that enables it to see one feature directly
through its local sensor and all the others indirectly,
through the shared sensor that receives the percep-
tions from nearby teammates. An object is considered
identified if all the features are observed by a robot,
for 10 consecutive time steps.
The object features are contained in a predefined
set of 8 features (4 enemy features and 4 friend fea-
tures), unknown by the robots. While enemy objects
always have 4 enemy features, friend objects can have
a mix of friend and enemy features (up to a max of 2
enemy features). This ambiguity serves a more real-
istic model and forces robots to evolve a more precise
identification process. The order, mix and choice of
the features are all uniformly distributed random pro-
cesses that take place at the generation of each object.
An example of the object identification scenario is
depicted on Fig. 1Schematics of the simulation envi-
ronment when identifying an object. Object 0 rep-
resents the unidentified object, with f1 to f4 repre-
senting its features; robot 0 to robot 3 represent the
swarm; grey filled sensors represent the local features
sensor of each robot; C represents the communication
between each team-member (shared features sensor)
and the circular lines represent the field of commu-
nication of each robot and its teammates (radius of
robot sensor).. Here, each robot is sensing a different
feature of the object with its front facing local sensor.
All robots are inside of each other’s range of commu-
nication, thus being able to share the local perception.
As a result, the 4 robots are able to identify the object,
as each of them knows all the features. They are now
able to deduce it’s category and decide whether they
should catch the object if it’s an enemy (any of them
can take that action).
Robot 0
Figure 1: Schematics of the simulation environment when
identifying an object. Object 0 represents the unidentified
object, with f1 to f4 representing its features; robot 0 to
robot 3 represent the swarm; grey filled sensors represent
the local features sensor of each robot; C represents the
communication between each team-member (shared fea-
tures sensor) and the circular lines represent the field of
communication of each robot and its teammates (radius of
robot sensor).
3.2 Controller Architecture
The robotic controller will be obtained using the AI
methods introduced in section 2.1 and is driven by a
CTRNN. The optimization will be set to maximize
a fitness function that measures the solution perfor-
mance.
The controller architecture is composed of 2 actu-
ators and 5 sensors. The information from the envi-
ronment perceived by the robot through its sensor is
represented by a [0,1] value and mapped to the neural
network inputs. A hidden neuron layer is also used,
with 5 hidden neurons. The neurons in this layer are
connected to each other and to themselves, maintain-
ing a state (this allows for short term memory). The
output layer of the ANN is connected to the robot’s
actuators.
An array of wall, robot, distances, features and
team-mate density sensors were chosen. Together,
they provide all the necessary information to success-
fully solve the proposed task. All the sensors, actu-
ators and corresponding ANN inputs and outputs are
described in Table 1Controller Architecture: Robot
Sensors and Actuators and corresponding ANN In-
puts and Outputs..
The following equation describes the network be-
haviour:
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
269
Table 1: Controller Architecture: Robot Sensors and Actuators and corresponding ANN Inputs and Outputs.
Sensor ANN Inputs
i) Wall Sensor 4
Reading in range [0,1] depending (total of 4 sensors around the
on distance to closest wall robot each with 90
◦
aperture)
ii) Robot Sensor 4
Reading in range [0,1] depending (total of 4 sensors around the
on distance to closest robot robot each with 90
◦
aperture)
iii) Object Distance Sensor 4
Reading in range [0,1] depending (total of 4 sensors around the
on distance to closest object robot each with 90
◦
aperture)
iv) Object Features Shared Sensor 8 (local) + 8 x N
close robots
(shared)
Binary readings corresponding (2 local sensors arranged like
to the feature in sight eyes, with 35
◦
aperture and
for the closest object 10
◦
between the eyes)
v) Robot Density Sensor 1
Reading corresponding (1 sensor)
to the percentage of robots
in sight according to total
Actuator ANN Output
i) Differential Drive Actuator 2
Output in range [0,1] depending (left and right)
on speed
ii) Object Catch Actuator 1
Binary output to catch an (catches closest object
object at max distance of 0.1 m)
τ
i
dH
i
dt
= −H
i
+
in
∑
j=1
ω
ji
I
i
+
hidden
∑
k=1
ω
ki
Z(H
k
+ β
k
) (1)
with
Z(x) = (1 + e
−x
)
−1
(2)
where τ
i
represents the decay constant, H
i
the neu-
ron state and ω
ji
the strength of the synaptic connec-
tion between neurons j and i (the weighted connec-
tions). β represents the bias and Z(x) is the sigmoid
function (equation 2). in represents the total number
of inputs and hidden the total number of hidden nodes
(5 were used). β, τ and ω
ji
compose the genome that
encodes the controller behavior, and are the param-
eters randomly initialized at the first generation and
optimized throughout the evolutionary process, where
β ∈ [−10, 10], τ ∈ [0.1, 32] and w
ji
∈ [−10, 10]. Inte-
grations follow the forward Euler method with an in-
tegration step size of 0.2 and cell potentials set to 0 at
network initialization.
The sensors follow the configuration depicted on
Fig. 2Robot sensors representation. Sensors i), ii) and
iii) are placed all around the perimeter of the robot
and sensor iv) consists in 2 front facing sensors with
an eye-like distribution, for a more realistic approach
since the perception is based on vision. This also al-
lows the robot to sense the path to reach the object
(due to the sensors overlapping at the center).
To catch the objects, robots have a binary actuator.
When active, the closest object is caught by the robot
if situated at a maximum distance of 0.1 m.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
270

Wall, Robot distance and Object distance sensors
(i,ii and iii)
1 m
0.75 m
45º
Object features sensor (iv)
Eyes overlapping (15º)
Figure 2: Robot sensors representation. 4 sensors with 90º
opening angle for sensors i), ii) and iii) and 2 eyes-like sen-
sor with 45º opening angle and 15º of overlapping for sensor
iv).
3.3 Fitness Function and Evolutionary
Process
To obtain the controller, the evolutionary process was
conducted 10 times (evolutionary runs) during 2000
generations. Each generation is composed of 100 in-
dividuals, each corresponding to a genome that en-
codes an ANN. To select the best individuals in a
generation, the considered fitness is the average of 30
tests. Each sample is tested during 5000 time steps
(500 seconds). For the test, every robot in the swarm
has the same genome. After each individual is eval-
uated, the top 5 are included in the next generation
and used to create the remanding 95 individuals of
the population: each one of the top individuals gener-
ates 19 new individuals by applying gaussian noise to
each genome with a probability of 10%.
The fitness function is very simple: it rewards
robots for identifying and catching enemies and pe-
nalizes them for catching friends. A formation com-
ponent was added to the fitness function, to stimulate
the robots to evolve a patrolling behavior and spread
out inside the arena, maintaining a known distance to
each other. The evolution is set to optimize this fitness
function, described in equation 3:
F
i
= α
i
+ β
i
(3)
with
α
i
=
timesteps
∑
n=0
10
−2
, if ADN ∈ [S
r
−
S
r
10
, S
r
+
S
r
10
] (4)
or
α
i
=
timesteps
∑
n=0
−|ADN − S
r
| × 10
−2
, otherwise (5)
and
β
i
=
Enemy
identi fied
5 × 10
−3
+
Enemy
caught
10
−3
−
Friends
caught
2 × 10
−3
−
Unidenti f ied
caught
10
−3
(6)
α
i
and β
i
correspond to the formation compo-
nent of the fitness function and the object identi-
fication component, respectively. ADN (Average
Distance to Nearest) is the average distance of the
robots to its closest team-mate, S
r
is the robot team-
mates sensor radius. Enemy
identi f ied
is the total
number of enemy objects that were identified dur-
ing the test, Enemy
caught
corresponds to the total
number of enemy objects caught. Friends
caught
and
Unidenti f ied
caught
corresponds to the total number of
friends / inoffensive objects caught, respectively. The
formation component rewards the robots for keeping
a distance between each other that corresponds to the
radius of their teammates sensor (S
r
) with an error
margin of
S
r
10
. This allows them to disperse around
the environment in search for objects while keeping a
known distance to their teammates.
4 MULTIPLE ENVIRONMENTS
The global contribution of this work is not only to
present a novel cooperative active perception solution
using EAs, but also to fill a gap in the current state of
the art: evaluate the possibility of evolving generic so-
lutions, adaptable to environments with multiple char-
acteristics and its singularities.
In the real-world, external factors heavily influ-
ence the swarm performance. In this section, we will
model different environments, mainly governed by
external conditions that influence the swarm perfor-
mance. Three main classes of environments will be
considered: (i) terrain, (ii) marine and (iii) aerial.
On a terrain environment, we simulate visual and
navigational obstacles present on terrain scenarios.
While terrain irregularities can be handled by the
robotic driver and thus don’t need to be handled by
the controller, accessibility issues like obstacles or ob-
ject occlusion will benefit from an optimized behav-
ior to solve the task in these conditions. In our model,
we included a set of rectangular opaque obstacles dis-
tributed around the environment.
The marine environment can help develop swarms
capable of running patrolling and exploration marine
tasks. Our model of the marine environment is based
on previous studies that successfully obtained con-
trollers capable of crossing the reality gap in a ma-
rine environment (Duarte et al., 2016) and is centered
around two main characteristics: (i) a constant drag-
ging current and (ii) robots movement inertia. Each
robot has two marine propellers (left and right) that
are controlled by the differential drive actuator.
Regarding the aerial environment, several studies
(Pflimlin et al., 2004; Cheviron et al., 2009; Leonard
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
271

et al., 2012) address some of the challenges of con-
trolling an Unmanned Aerial Vehicle (UAV): maneu-
verability, wing gusts and other aerodynamic efforts.
In (Cheviron et al., 2009), the authors study the influ-
ence of wind gusts on the system concluding that it is
a crucial problem for real-world outdoor applications,
especially on an urban environment. We will base our
model of the aerial environment in the simulation of:
(i) constant wind and (ii) intermittent wind gusts, as
these seem the most relevant challenges. This envi-
ronment can be used to achieve controllers capable of
drone obstacle avoidance and object detection.
All the agent’s solutions are built upon the solu-
tion presented in section 3.1. A description of each
of the environments and it’s singularities is summed
in table 2Multiple Environments: Description of each
environment and it’s singularities..
Obstacles width and height, sea current and wind
magnitudes, gust duration and whether a gust is
present or not are all random values drawn from a uni-
form distribution. The intervals used were designed,
by trial and error, to include different problems for the
agents to solve in each environment, although all on a
similar difficulty level.
5 RESULTS AND DISCUSSION
As we place the robots in different settings, the op-
timization will follow different paths and we obtain
different solutions, specifically optimized to the setup
the evolutionary process was conducted within. The
evolutionary process described in section 3.3 was
conducted in four main setup categories: (i) in each
of the 3 environments described, (ii) in an ideal setup
(described in section 3.1), (iii) in a noisy environment
and (iv) in a hybrid scenario - consists in each sample
being conducted in a different environment (terrain,
marine or aerial). A total of 60 evolutionary processes
were conducted, taking 29 days to complete on a com-
puter grid with an average availability of 75 workers.
Conducting the evolutionary process in each of the
3 environments gives us a benchmark for the target
controller behavior in each environment. This way,
we will obtain controllers specifically optimized for
each environment. If we find controllers obtained via
other methods (ie. noisy or hybrid) to perform as
good as the environment specific controllers, the most
generic solution will be validated.
The noisy environment was introduced as noise
can be seen as an abstract and multi-purpose way of
generating a more robust solution. Introducing noise
on the ANN Inputs during the evolutionary process
is one of the known ways of creating a solution that
is able to cope with slightly different conditions than
the ideal environments usually used during training,
thus boosting the ability to cross the reality gap. All
sensors are affected by the noise with a fixed offset of
[-0.1,0.1] and random noise [0.1,0.1], for each read-
ing as suggested in (Romano et al., 2016). For ob-
ject features, a 10% probability of having each binary
reading reversed is used, a value equivalent to the pre-
vious. Offset, noise values and binary state reversions
are random processes drawn from an uniform distri-
bution.
In the hybrid scenario, 1/3 of the samples are con-
ducted in the terrain, marine and aerial environments.
Controllers will be tested not only in the environ-
ment they were evolved in but also in all the others.
The evolutionary process was conducted to optimize
the fitness function set in Eq. 3 with the configura-
tion detailed in Table 1Controller Architecture: Robot
Sensors and Actuators and corresponding ANN In-
puts and Outputs.. The tests are done to the best con-
troller resulting from the evolution, with an average
of 100 samples during 10000 time steps.
Results for each evolution are condensed in Table
3Each evolution tested in each environment. in terms
of: fitness, percentage of friends and enemies iden-
tified and percentage of enemies and friends caught.
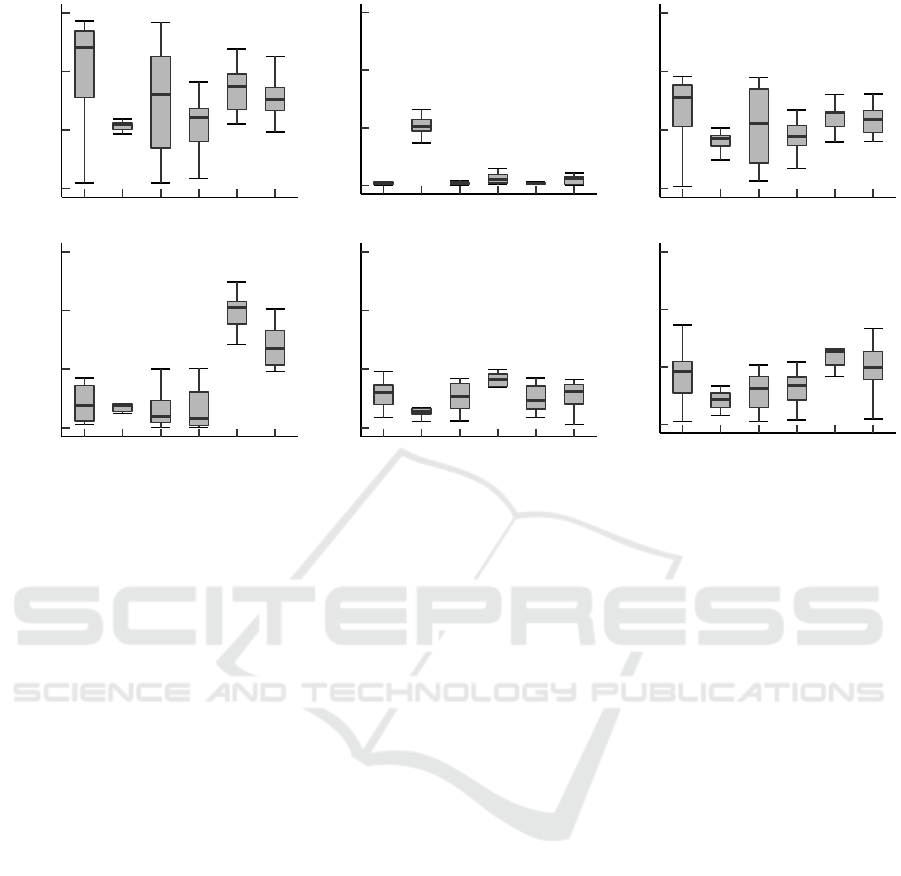
In Figure 3All controllers tested in all scenarios we
can analyse the fitness dispersion of each controller,
tested on each scenario.
Although environment specific evolution provided
good results, it was not always the best option. The
terrain environment is an example: the ideal and ma-
rine evolved controllers had better performance when
tested on the terrain environment, with an average fit-
ness of 2576 ± 1340 and 2191 ± 1261, respectively,
while the terrain evolved controller scored a fitness of
2158 ± 1433 (15% lower). Although the margin is
small, it stands out the fact that the terrain evolved
scenario was not the best fit to solve the task in the
environment it was trained in, possibly due to the
complexity of the scenario preventing the evolution
from extracting the object identification and catching
as well as it did on the ideal environment. The char-
acteristics of the terrain environment conducted the
evolution to a behavior in which the swarm separates
in small search groups strategically placed in spaces
confined by the obstacles.
When tested on the noisy environment, all con-
trollers failed to solve the task. Although the noise
magnitude used in these experiments gave us good
results in previous studies (Romano et al., 2016), it
appears to be destructive in this scenario. In previous
studies, we used a simple aggregation and formation
task with identical noise applied. The controller we
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
272

Table 2: Multiple Environments: Description of each environment and it’s singularities.
Environment Singularities
Terrain Environment i) [0,7] obstacles inside the arena, width and height between [25,65]
cm
Marine Environment i) F
current
∈ [−0.1, 0.1] cm/s for each axis fixed throughout each
sample (constant current)
ii) propellers movement inertia, with a maximum increment of
0.1m/s for each timestep,
for each propeller.
Aerial Environment i) F
current
∈ [−0.1, 0.1] cm/s for each axis fixed throughout each
sample (constant wind)
ii) F
gust
∈ [−2, 2] cm/s for each axis fixed fixed throughout the gust
period. Gust
period
∈ [0, 20]
seconds, sorted at the beginning of each wind gust.
Wind gusts are intermittent, sorted between silent and windy peri-
ods.
present in this work shares many of the same sensors
and actuators as the solution on the previous study,
the biggest difference being the shared features sen-
sor. While the search and identification portion of
the behavior seems correct, the categorization was
the main variable to fail in the controller (that caught
both enemies and friends), leading us to conclude the
shared features sensor was the bottleneck that caused
the noisy evolved controller to fail, being the compo-
nent less prone to noise.
The marine environment is the environment with
the biggest discrepancy between the environment spe-
cific evolution performance and the remaining, with
the environment specific controller scoring an aver-
age fitness of 3473 ± 1549. Hybrid evolved controller
on this environment scored a lower fitness of 2242 ±
1120. The ideal, terrain and aerial evolved controller
scored the lowest fitness by a big margin: 843 ± 1518,
694 ± 1415 and 768 ± 901, respectively. The robot
movement inertia is the main difference in this en-
vironment. This results shows us that although the
adaption to this characteristic is needed (low fitness
on the ideal evolution), the adaption is not hard for
the evolution to handle (high fitness in the environ-
ment specific and hybrid controllers). Direct observa-
tion of the behavior presents no visible differences to
the remaining solutions.
The aerial environment presented the lowest
global fitness values among the three environments.
With no clear performance distinction from the envi-
ronment specific solution, we conclude that the evo-
lution was not able to generate a controller that com-
pensates for the wind gusts. Observing the behavior,
we notice that when the wind gusts appear, the robots
lose control of the object being identified. Controllers
evolved in the aerial environment revealed a tendency
to always keep close together (behavior found on 90%
of the evolutionary runs). This tendency was not ob-
served in the remaining scenarios and represents a
specific path the aerial evolution followed, possibly
keeping teammates close to use them as a reference
to acquire awareness of when the wind gusts drag the
robots out of their position.
We noted that on all environments, the hybrid con-
troller performance revealed to be on par with the en-
vironment specific results in terms of fitness. To fur-
ther analyze these results, the differences between the
environment specific controllers and the hybrid con-
troller are condensed on Table 4Environment spe-
cific controllers compared to the hybrid evolved con-
troller in each scenario., for: (i) ”enemies identified
ratio”, (ii) ”enemies caught ratio” and (iii) ”friends
and unidentified objects caught ratio”.
We notice that the differences between the two ap-
proaches range from a positive performance of [0,2]%
for the hybrid controller in the terrain and marine en-
vironment and a slight degradation of performance of
[1,8]% in the aerial environment.
The hybrid controller reveals to be equivalent to
the environment specific controllers in the terrain and
marine environments, and worse on the aerial envi-
ronment. The worse performance on the aerial envi-
ronment is common to most of the experiments, pos-
sibly linked to the overall complexity of this environ-
ment. Still, the differences found between these are
of small magnitude. In terms of observable behav-
ior, there are no visible differences as both solve the
task in the same manner. We can state that the perfor-
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
273
Table 3: Each evolution tested in each environment.
Testing scenario Fitness ± Stdev Enemies iden-
tified (%)
Enemies
caught (%)
Friends caught
(%)
Unidentified caught
(%)
Terrain environment evolution
Ideal Environment 2874 ± 1922 54% 42% 1% 5%
Noisy Environment -529 ± 1713 5% 0% 0% 4%
Terrain Environment 2158 ± 1433 41% 32% 1% 3%
Marine Environment 694 ± 1415 25% 11% 0% 3%
Aerial Environment 752 ± 801 22% 13% 0% 3%
Hybrid Environment 1263 ± 1056 31% 20% 1% 3%
Marine environment evolution
Ideal Environment 3067 ± 1668 56% 46% 2% 7%
Noisy Environment -492 ± 1600 4% 0% 0% 4%
Terrain Environment 2191 ± 1261 43% 34% 2% 5%
Marine Environment 3473 ± 1549 59% 51% 2% 7%
Aerial Environment 737 ± 684 24% 13% 0% 4%
Hybrid Environment 2242 ± 1120 42% 34% 1% 5%
Aerial environment evolution
Ideal Environment 2385 ± 1026 48% 40% 6% 7%
Noisy Environment 92 ± 210 15% 2% 3% 1%
Terrain Environment 1715 ± 799 37% 31% 5% 5%
Marine Environment 768 ± 901 26% 12% 1% 3%
Aerial Environment 1428 ± 618 35% 23% 2% 4%
Hybrid Environment 1334 ± 777 34% 23% 3% 4%
Ideal environment evolution
Ideal Environment 4239 ± 2573 71% 64% 2% 7%
Noisy Environment -90 ± 515 6% 0% 0% 1%
Terrain Environment 2576 ± 1340 45% 37% 1% 3%
Marine Environment 843 ± 1518 25% 12% 0% 2%
Aerial Environment 836 ± 748 22% 13% 0% 3%
Hybrid Environment 1557 ± 1112 33% 23% 0% 3%
Noisy environment evolution
Ideal Environment 2120 ± 428 59% 47% 42% 4%
Noisy Environment 2186 ± 319 58% 48% 43% 4%
Terrain Environment 1526 ± 209 45% 36% 32% 4%
Marine Environment 191 ± 714 25% 15% 13% 6%
Aerial Environment 443 ± 193 22% 10% 9% 2%
Hybrid Environment 809 ± 388 31% 20% 18% 3%
Hybrid environment evolution
Ideal Environment 3031 ± 1292 54% 45% 4% 6%
Noisy Environment 157 ± 220 16% 0% 0% 0%
Terrain Environment 2108 ± 951 41% 34% 3% 4%
Marine Environment 2553 ± 1176 48% 38% 2% 6%
Aerial Environment 1057 ± 483 27% 16% 1% 3%
Hybrid Environment 2004 ± 881 40% 31% 2% 4%
Table 4: Environment specific controllers compared to the hybrid evolved controller in each scenario.
Environment Terrain Environment Marine Environment Aerial Environment
Controller Env. spe-
cific
Hybrid (± diff) Env. spe-
cific
Hybrid (± diff) Env. spe-
cific
Hybrid (± diff)
Enemies identified (%) 41% 41% (0%) 43% 48% (+5%) 35% 27% (-8%)
Enemies caught (%) 32% 34% (+2%) 36% 38% (+2%) 23% 16% (-7%)
Friends caught (%) 1% 3% (+2%) 2% 2% (0%) 2% 1% (-1%)
Unidentified caught (%) 3% 4% (+1%) 5% 6% (+1%) 4% 3% (-1%)
mance for the hybrid controller on the terrain, marine
and aerial environments is similar to the one obtained
by evolving specific controllers, differing only by a
small negligible margin with no clear performance
impact.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, we proposed a novel approach for
swarm robotics environment perception. This ap-
proach is different from the remaining state of the art
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
274
●
●
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Ideal Environment
Fitness
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Noisy Environment
Fitness
●
●
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Terrain Environment
Fitness
●
●
●
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Marine Environment
Fitness
●
●
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Aerial Environment
Fitness
●
●
●
0
2000
4000
6000
Ideal Noisy Terrain Aerial MarineHybrid
Hybrid Environment
Fitness
Figure 3: All controllers tested in all scenarios.
for two main reasons: (i) the controller is obtained
using EAs and (ii) the study is focused on scaling the
approach to multiple environments.
We conducted the study in a simulation scenario,
with unidentified objects appearing from any side of
the screen moving to the opposite side, with the pos-
sibility of having two objects on screen at the same
time. The evolved behavior consists in performing a
dispersed search around the arena, getting closer to
the objects when an enemy feature is detected. When
robots gather around the object, one of them catches
it. Attention given to friend features is lower, so
robots didn’t gather around the friend objects most
times, nor caught them.
Besides the ideal environment, we also modeled:
(i) a terrain environment based on obstacles randomly
placed around the environment, (ii) a marine environ-
ment with constant currents and inertia in the robots’
movements and (iii) an aerial environment with a con-
stant current and wind gusts. Also, we selected 2 main
scenarios that are known to evolve more robust behav-
iors: (i) noisy evolution and (ii) a hybrid evolution in
the multiple scenarios. These were compared to the
ideal evolution scenario.
When observing the evolved behaviors, two main
categories can be extracted: in the first, the robots
evolved a behavior in which the team performs a dis-
persed search around the arena and then aggregates
around the object to proceed with the identification;
in the second, the robots follow each other in circu-
lar paths around the environment once again aggregat-
ing towards the object to identify. The identification
process followed very similar behavior in all experi-
ments: circumnavigating the object while front-facing
it until the identification is complete. Specialization
was also observed on the environment-specific evolu-
tions: in the terrain evolved controller the swarm had
a tendency to separate in groups and search inside the
areas confined by the obstacles.
The noisy evolution not only failed to evolve a
more robust and scalable solution, but also failed to
solve the task at all. The noise magnitude that was
adequate for similar tasks (Romano et al., 2016) re-
vealed to be destructive for this task. The global
objective of this work was to test and compare sev-
eral ways of developing a controller. The controller
should be capable of collectively identifying and cat-
egorizing a set of objects and act upon multiple types
of environments based on the categorization. This
objective was successfully completed as we demon-
strated how EAs could synthesize a controller capable
of solving this task. We have also tested the flexibility
of a controller trained in multiple environments: the
hybrid solution. Although environment-specific con-
trollers globally outperformed the hybrid controller
in the respective environment, the difference between
the two was small enough to state that both controllers
are equally capable of solving the task.
Future work could start with the scaling of the ap-
proach using 3D models of the environments. This
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
275

would allow for a more realistic simulation with ma-
jor impact specifically on the aerial environment,
where the 2D representation used in this work is a
major simplification. Another necessary step is the
deployment of the solution to real robots and real
environments, optimization and study of the chal-
lenges associated with it. The biggest difficulty for
the controller appeared to be on the aerial environ-
ment, specifically the wind gusts, that the controller
had difficulty in compensating. Future work could
also reside in optimizing this controller for better re-
sults in the different environments. For example, giv-
ing the controller access to a sensor that detects wind
gusts could help the robot compensate them and boost
the performance on the aerial environment.
ACKNOWLEDGMENTS
This work was partly funded through national funds
by FCT Fundac¸
˜
ao para a Ci
ˆ
encia e Tecnologia, I.P.
under projects UIDBEEA500082020 (Instituto de
Telecomunicac¸
˜
oes) and UIDB044662020 (ISTAR).
REFERENCES
Ahmad, A., Nascimento, T., Conceicao, A. G. S., Moreira,
A. P., and Lima, P. (2013). Perception-driven multi-
robot formation control. In Proceedings - IEEE In-
ternational Conference on Robotics and Automation,
pages 1851–1856.
Angelo Cangelosi, Domenico Parisi (1994). The touch sen-
sitive behavior of caenorhabditis elegans: A simula-
tion approach using neural networks. Technical Re-
port May, Institute of Psychology C.N.R. - Rome.
Chen, J. and Wermter, S. (1998). Continuous Time Re-
current Neural Networks for Grammatical Induction.
In International Conference on Artificial Neural Net-
works,1998, pages 381–386.
Cheviron, T., Plestan, F., and Chriette, A. (2009). A robust
guidance and control scheme of an autonomous scale
helicopter in presence of wind gusts. International
Journal of Control, 82(12):2206–2220.
Cliff, D., Husbands, P., and Harvey, I. (1993). Evolving
visually guided robots. In Proceedings of the Second
International Conference on Simulation of Adaptive
Behavior (SAB), pages 374–383.
Duarte, M., Costa, V., Gomes, J., Rodrigues, T., Silva, F.,
Oliveira, S. M., and Christensen, A. L. (2016). Evolu-
tion of collective behaviors for a real swarm of aquatic
surface robots. PLoS ONE, 11(3):1–25.
Duarte, M., Oliveira, S., and Christensen, A. L. (2012).
Hierarchical evolution of robotic controllers for com-
plex tasks. In 2012 IEEE International Conference on
Development and Learning and Epigenetic Robotics,
ICDL 2012.
Duarte, M., Silva, F., Rodrigues, T., Oliveira, S. M., and
Christensen, A. L. (2014). {JBotEvolver}: A versatile
simulation platform for evolutionary robotics. In Pro-
ceedings of the International Conference on the Syn-
thesis & Simulation of Living Systems (ALIFE), pages
210–211.
Eaton, M. (2007). Evolutionary humanoid robotics: past,
present and future. Lecture Notes in Computer Sci-
ence, 4850:42.
Fitzpatrick, P. M. (2003). Perception and perspective in
robotics. In Proceedings of the 25th Annual Confer-
ence of the Cognitive Science Society.
Hartland, C. and Bred
`
eche, N. (2006). Evolution-
ary robotics, anticipation and the reality gap. In
2006 IEEE International Conference on Robotics and
Biomimetics, ROBIO 2006, pages 1640–1645.
Jakobi, N., Husbands, P., and Harvey, I. (1995). Noise and
the Reality Gap: The Use of Simulation in Evolution-
ary Robotics. Lecture Notes in Computer Science,
929:704–720.
Jim, K., Giles, C. L., and Horne, B. G. (1995). Effects of
Noise on Convergence and Generalization in Recur-
rent Networks. In Advances in Neural Information
Processing Systems (NIPS) 7, page 649.
Kim, S.-W., Qin, B., Chong, Z. J., Shen, X., Liu, W., Ang,
M. H., Frazzoli, E., and Rus, D. (2015). Multivehicle
cooperative driving using cooperative perception: De-
sign and experimental validation. IEEE Transactions
on Intelligent Transportation Systems, 16.
Le, Q. V., Saxena, A., and Ng, A. Y. (2010). Active Percep-
tion : Interactive Manipulation for Improving Object
Detection. Technical report, Stanford.
Leonard, F., Martini, A., and Abba, G. (2012). Robust non-
linear controls of model-scale helicopters under lat-
eral and vertical wind gusts. In IEEE Transactions on
Control Systems Technology, pages 154–163.
Lewis, M. A., Fagg, A. H., and Solidum, A. (1992). Ge-
netic Programming Approach to the Construction of a
Neural Network for Control of a Walking Robot. In In
IEEE International Conference on Robotics and Au-
tomation, pages 2618–2623.
McCulloch, W. S. and Pitts, W. (1943). A logical calculus of
the ideas immanent in nervous activity. The Bulletin
of Mathematical Biophysics, 5(4):115–133.
Merino, L., Caballero, F., Mart
´
ınez-de Dios, J. R., Ferruz,
J., and Ollero, A. (2006). A cooperative perception
system for multiple UAVs: Application to automatic
detection of forest fires. Journal of Field Robotics,
23(3-4):165–184.
Pflimlin, J., Soueres, P., and Hamel, T. (2004). Hover-
ing flight stabilization in wind gusts for ducted fan
UAV. 2004 43rd IEEE Conference on Decision and
Control (CDC) (IEEE Cat. No.04CH37601), 4(Jan-
uary 2005):3491–3496.
Rodrigues, T., Duarte, M., Figueir
´
o, M., Costa, V., Oliveira,
S. M., and Christensen, A. L. (2015). Overcoming
limited onboard sensing in swarm robotics through
local communication. Lecture Notes in Computer
Science (including subseries Lecture Notes in Artifi-
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
276

cial Intelligence and Lecture Notes in Bioinformatics),
9420:201–223.
Romano, P., Nunes, L., Christensen, A. L., Duarte, M.,
and Oliveira, S. M. (2016). Genome Variations. In
Reis, L. P., Moreira, A. P., Lima, P. U., Montano, L.,
and Mu
˜
noz-Martinez, V., editors, Robot 2015: Second
Iberian Robotics Conference: Advances in Robotics,
Volume 1, pages 309–319, Cham. Springer Interna-
tional Publishing.
Spaan, M. T. J. (2010). Cooperative Active Perception using
POMDPs. October, pages 4800–4805.
Spaan, M. T. J., Veiga, T. S., and Lima, P. U. (2010). Active
cooperative perception in network robot systems us-
ing POMDPs. In IEEE/RSJ 2010 International Con-
ference on Intelligent Robots and Systems, IROS 2010
- Conference Proceedings, pages 4800–4805.
Spaan, M. T. J., Veiga, T. S., and Lima, P. U. (2014).
Decision-theoretic planning under uncertainty with
information rewards for active cooperative percep-
tion. Autonomous Agents and Multi-Agent Systems,
29(6):1157–1185.
Hybrid Training to Generate Robust Behaviour for Swarm Robotics Tasks
277
