
Development of Monocular Vision-Based Tracking Method for
Wheelchair Sports
Shimpei Aihara
1a
, Takara Sakai
2
and Akira Shionoya
2
1
Department of Sport Science and Research, Japan Institute of Sport Sciences, Tokyo, Japan
2
Department of Management and Information Systems Science, Nagaoka University of Technology, Niigata, Japan
Keywords: Wheelchair Sports, Positioning System, Monocular Camera, Deep Learning.
Abstract: Recently, tracking systems to measure player positions have been introduced in the sports domain. However,
wheelchair sports have not been considered extensively. In addition, user-friendly and low-cost systems for
wheelchair sports are uncommon. Thus, in this paper, we propose a method to calculate the kinematic data of
wheelchair athletes on a playing field (i.e., player positions and wheelchair directions) using images acquired
by a monocular camera. The proposed method was evaluated experimentally, and the root mean square error
of the position accuracy was 0.11 m, and the mean average error of the direction accuracy was 6.78 degrees.
The results demonstrate that the proposed method outperforms existing tracking methods in terms of accuracy.
The findings of this study suggest that it is possible to acquire kinematic data of wheelchair athletes using a
simple method, which we expect to contribute to improvement analysis of the wheelchair athlete performance.
1 INTRODUCTION
Sports promote mental and physical development,
enrich humanity, and play an important role in living
a healthy life. For people with disabilities, sports can
be an important component of their medical
rehabilitation. In addition, sports can provide lifelong
recreation and can be played at various levels
including highly competitive ones, e.g., the
Paralympics. In Japan, particularly in competitive
sports, interest in sports for the disabled increased due
to success of the Tokyo 2020 Olympic and
Paralympic Games. Wheelchair sports accounted for
about 50% of the competitions held at the Paralympic
Games, e.g., tennis, basketball, athletic sports,
badminton, rugby, and table tennis. Wheelchair sports
are recognized as an international sport, and global
competitiveness has advanced significantly in recent
years (Perret, 2017).
Moreover, in recent years, there has been a
growing trend of utilizing technology in the field of
sports. Various technologies are used to monitor
performance in both competition and training to
realize competitive advantages (Halson, 2014). In
wheelchair sports, wheelchair movement
performance is critical to evaluate game performance
a
https://orcid.org/0000-0002-8513-0204
and optimize training routines (van der Slikke, 2016);
however, literature related to wheelchair sports is
limited compared to that of other Olympic events, and
the quantitative evaluation of wheelchair movement
performance is insufficient (Perret, 2017). Thus, the
goal of this study is to realize an affordable tracking
system to obtain kinematic data of wheelchair sports
to improve wheelchair movement performance
assessment. However, the literature related to
wheelchair sports is scarce, and the quantitative
evaluation of wheelchair movement performance is
insufficient (Perret, 2017).This study aims to realize
a tracking system to obtain kinematic data of
wheelchair sports in order to improve the level of
movement performance assessment.
2 RELATED WORK
With the increasing competitiveness in wheelchair
sports, the utilization of technologies has expanded
(Grogan, 2012) (Laferrier, 2012). For example, to
evaluate wheelchair movement performance, Inertial
Measurement Unit (IMU) sensors attached to the
wheelchair are used frequently due to their user-
friendliness and low cost (Shepherd, 2018). IMU
Aihara, S., Sakai, T. and Shionoya, A.
Development of Monocular Vision-Based Tracking Method for Wheelchair Sports.
DOI: 10.5220/0012203600003587
In Proceedings of the 11th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2023), pages 179-186
ISBN: 978-989-758-673-6; ISSN: 2184-3201
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
179

sensors register movement, speed, and angular
velocity of the wheelchair player (Pansiot, 2011) (van
Dijk, 2022). In addition, methods based on IMU
sensors can measure wheelchair movement easily.
However, wheelchair positions are not accurately
defined with the help of only IMUs accurate, which
is one of the problems (van der Slikke, 2017).
The local positioning system (LPS) using wireless
technology is a method that can be used to track
wheelchair positions in various sports, e.g.,
wheelchair rugby and basketball (Rhodes, 2014), as
well as wheelchair tennis (Perrat, 2015). However, to
the best of our knowledge, very few related studies
have been reported.
Wireless LPSs measure the position and speed of a
wheelchair player at high accuracy. They comprise
many fixed base stations and mobile tags attached to
the wheelchair players; thus, there are some problems,
e.g., the need for installation of base stations at the
venue and expensive equipment. In addition, LPSs
cannot obtain wheelchair motion direction. In
wheelchair sports, the chair-work skill is an important
factor when evaluating performance; thus, wheelchair
direction information must be an available (Mason,
2013). In addition, attaching IMU sensors or LPSs to
the wheelchairs or players causes several issues, e.g.,
preventing movement. In addition, such devices are
not always permitted during official competitions.
Video-based tracking systems have been reported
in the reference. Such systems eliminate the need to
attach devices to the wheelchairs or players, and,
therefore can collect data about all athletes in the
game. In field sports, e.g., soccer, player positions can
be acquired using deep learning techniques and image
analysis from multiple cameras placed around the
field (Redwood, 2012) (Linke, 2020). These
techniques are used in FIFA and Japanese
professional league matches. However,construction
work and expensive equipment are required; thus, the
costs of such systems are high.
Therefore, less expensive methods have been
proposed to obtain player positions using single
camera images (Buric, 2019) (Zhang, 2020). In the
wheelchair rugby context, a previous study reported
the acquisition of player positions using single
camera images. Here, the wheelchair player detection
rate and the position accuracy were approximately
20% lower than in the case of soccer; thus, operator
corrections were required (Sarro, 2008). To the best
of our knowledge, no video-based tracking system
that obtains wheelchair directions has been reported
to date.
In this study, we developed a video-based tracking
method for wheelchair sports. Figure 1 shows an
outline of the proposed method. To realize a simple
and low-cost system, only a single camera is
employed in the proposed method. The proposed
system output both the wheelchair players’ positions
and the wheelchair motion directions. Thus, the
proposed method represents a novel technique to
acquire the variety data that has been difficult to get
using other systems.
Figure 1: Outline of the proposed method.
3 PROPOSED METHOD
Figure 2 shows the steps followed to develop the
proposed method. In the following, we first describe
the development of the detection model, including
dataset creation and the design of the model). We then
describe the development of the tracking model,
including the tracking model design, camera
calibration, and the calculations used to acquire the
position and direction information.
Figure 2: Steps to develop the proposed method.
3.1 Detection Model
Here, we describe the development of the model used
to detect a wheelchair player in the acquired images.
Previous studies have reported monocular camera-
based tracking methods that use the YOLO method
(Redmon, 2016) to detect a bounding box (i.e., a
square region around each player in the image) (Buric,
2019) (Zhang, 2020). However, these previous
studies were limited to able-bodied athletes. When
Deep learning
Output
Tracking data
(Position, Direction)
Input
Video
1. Detection model
Dataset creation
Detection model design
2. Tracking model
Tracking model design
Camara calibration
Position and direction calculation
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
180
applied to a wheelchair player, bounding boxes were
only detected for the player, i.e., the wheelchair was
not included. Thus, the positions of the wheelchair
players were identified as being above the ground,
and correct positions could not be detected. Therefore,
an effective model to accurately detect wheelchairs is
required.
In previous studies (Buric, 2019) (Zhang, 2020),
the center of the bounding box or the midpoint of the
lower edge of the bounding box was used as the
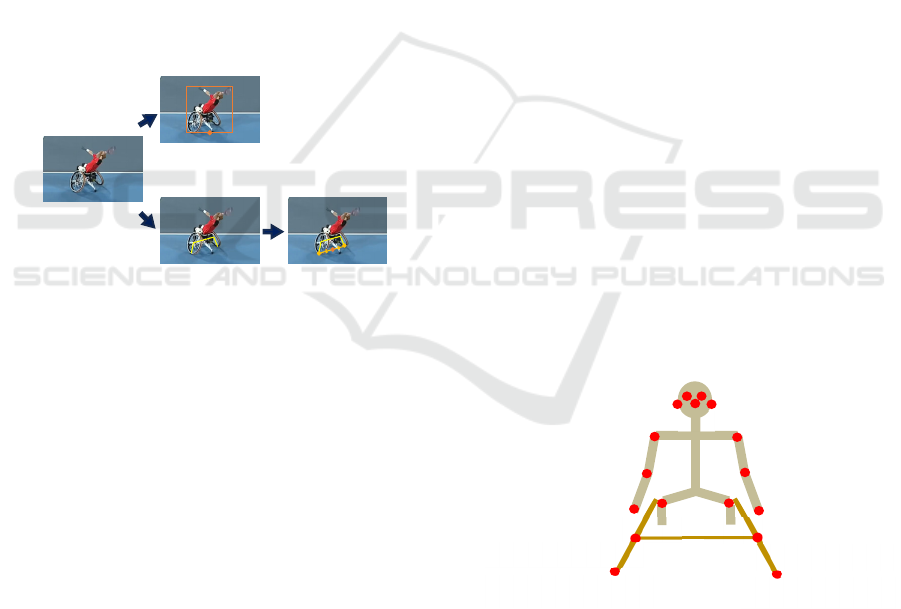
player position. In the current study, we developed a
method to estimate the wheelchair structure by
applying a human posture estimation model. Based
on this model, the bottom points of each wheel are
detected, and the midpoint of the bottom points of
each wheel is calculated as the wheelchair player’s
position (shown in Figure 3). This method can detect
the wheelchair player’s positions using a monocular
camera independent of the camera positions,
wheelchair directions, and wheelchair player’s
posture.
Figure 3: Wheelchair and player detection by the proposed
model.
3.1.1 Dataset Creation
To the best of our knowledge, methods to estimate
wheelchair structure from a camera image have not
been reported. Thus, we developed a model to
estimate the wheelchair structure. A marker-less
posture estimation technique that uses a camera
image requires a large dataset to optimize a large
number of parameters. Thus, developing a wheelchair
structure model from scratch required a large dataset
of images with corresponding wheelchair key point
coordinates. However, it is difficult to collect a large
number of images of a specific category, e.g.,
wheelchair sports. In addition, it is difficult to
construct a large dataset because this requires a lot of
time and effort. Thus, in this study, we adapted a
retraining method (Dai, 2015) that converts the
human pose estimation model trained on the MS
COCO library (Lin, 2014), which is a large human
pose dataset. A new wheelchair structure estimation
model can be created even with a small wheelchair
sports dataset. In this study, we constructed a
wheelchair sports dataset containing the feature
points of wheelchair players and their wheelchairs to
be used in the retraining method.
Figure 4 shows the key point coordinates. Here, the
key points included the facial parts and the upper
body joint points, in reference to the MS COCO data
used in the pretraining process. The wheelchair key
points were the centers of the left and right wheels
and the bottoms of each wheel, which are common to
all wheelchairs and can be used to capture the
structure of the wheelchair effectively. In this study,
a total of 17 key points (i.e., nose, left eye, right eye,
left ear, right ear, left shoulder, right shoulder, left
elbow, right elbow, left wrist, right wrist, left hip,
right hip, center of left wheel, center of right wheel,
bottom of left wheel, and bottom of right wheel) were
defined in the wheelchair sports dataset. The knees
and ankles defined in the MS COCO dataset were
replaced by the centers of each wheel and the bottoms
of each wheel in the wheelchair sports dataset. These
changes were implemented to facilitate efficient fine
tuning of the parameters. The process used to
construct the wheelchair sports dataset is described as
follows.
Step 1. Automatically collect (royalty-free)
wheelchair sports images from the Internet.
Step 2. Normalize the image resolution (to 640 × 380
dpi).
Step 3. Mask people in the images who were not
related to the wheelchair players (e.g.,
referees and spectators).
Step 4. Annotate the 17 key points.
Figure 4: Key point coordinates.
In total, the wheelchair sports dataset contained
approximately 2300 images with approximately 6000
subjects. The dataset included images of wheelchair
basketball, rugby, tennis, badminton, and track and
field. The images were collected from various
wheelchair players in terms of gender and ethnicity.
The pixel size and posture of the wheelchair players
Pro
p
osed metho
d
Conventional method
left shoulder
nose
left eye
right eye
left ear
right ear
left elbow
right elbow
left wrist
left hip
right shoulder
right wrist
center of left wheel
right hip
bottom of left wheel
center of right wheel
bottom of right wheel
Development of Monocular Vision-Based Tracking Method for Wheelchair Sports
181
in the images also differed, and some of the images
included overlapping wheelchair player images. The
key point coordinates on the images were annotated
manually by sports biomechanics experts. In addition,
the data were divided randomly into training and test
sets at a ratio of 7:3.
3.1.2 Detection Model Design
We adapted a human posture estimation model
pretrained on the large-scale MS COCO dataset (Lin,
2014), and we retrained it on the acquired wheelchair
sports dataset. As the foundation model, we used the
Mask R-CNN (He, 2017), which is a widely used,
flexible, and generic framework for human posture
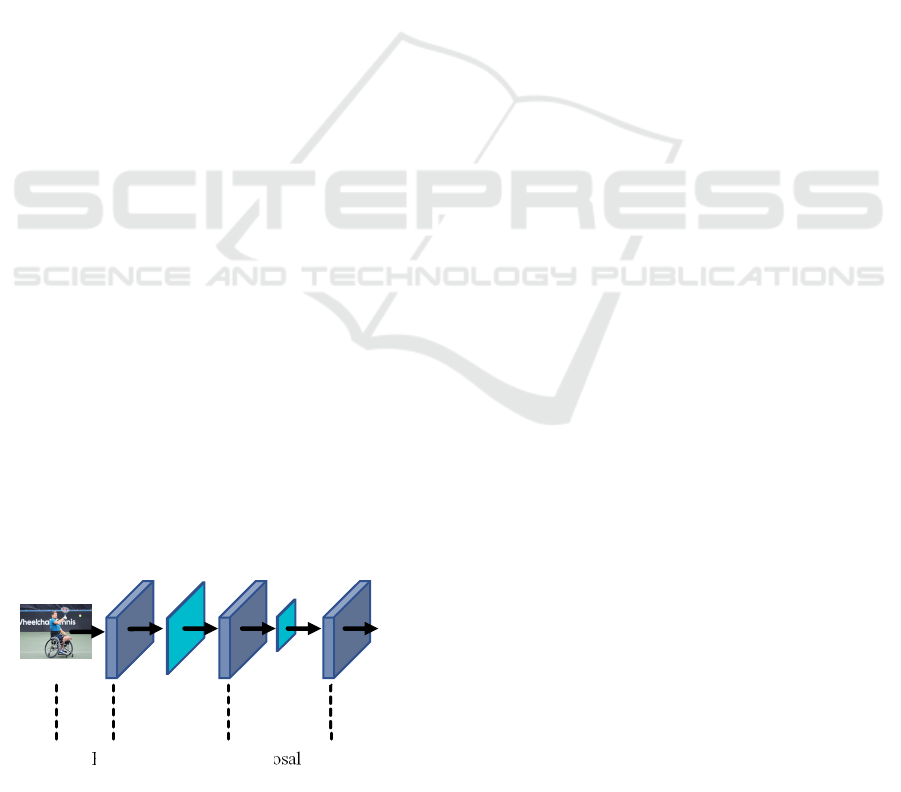
estimation methods. The architecture of the
foundation model is shown in Figure 5. As shown,
this model comprises three networks, i.e., the
backbone network to extract features from the RGB
images, the region proposal network to detect the
regions of players and wheelchairs, and the key point
branch to extract the key point coordinates of the
players and wheelchairs. Thus, fine tuning the
parameters of the three networks was required in this
study.
First, the initial parameter weights were obtained
by pretraining the algorithms on the MS COCO
dataset, which contains posture information for
approximately 150,000 humans in approximately
60,000 images. Then, the training data from the
acquired wheelchair sports dataset were used for fine
tuning. The optimization function was the Adam
optimizer (Kingma, 2014) with a learning rate of 0.01.
Here, 30% one of the training data was used as
validation data, and the parameter weights with the
minimized loss in the validation data were selected.
The source code was implemented in Open CV,
Python, and PyTorch, and training was performed
using an NVIDIA Tesla V100 GPU on Google
Colaboratory.
As a result, a new posture estimation model was
developed that outputs the key point coordinates of
the wheelchair player. Note that only the coordinates
Figure 5: Architecture of the fundamental model.
of the bottoms of each wheel were used in the tracking
method.
3.2 Tracking Model
3.2.1 Tracking Model Design
In Section 3.1, we described the model used to detect
the key point coordinates (i.e., the coordinates of the
bottoms of each wheel) in the images. However, this
model was insufficient for the overall task due to
occlusion caused by players overlapping images or
motion blur caused by quick movements. Thus, we
employed a model that tracks the bottoms of each
wheel of the same player’s and corrects the missing
frames by linking a series of detection results between
video frames. Here, we used the Byte Track method
(Zhang, 2022) to track multiple objects. Byte Track
links the detection results between frames by
predicting the frame-to-frame changes in key point
regions using a Kalman filter. This simple algorithm
provides high stability, high speed, and high accuracy.
The algorithm can stably track the bottom of each
wheel of the same athlete throughout the entire video.
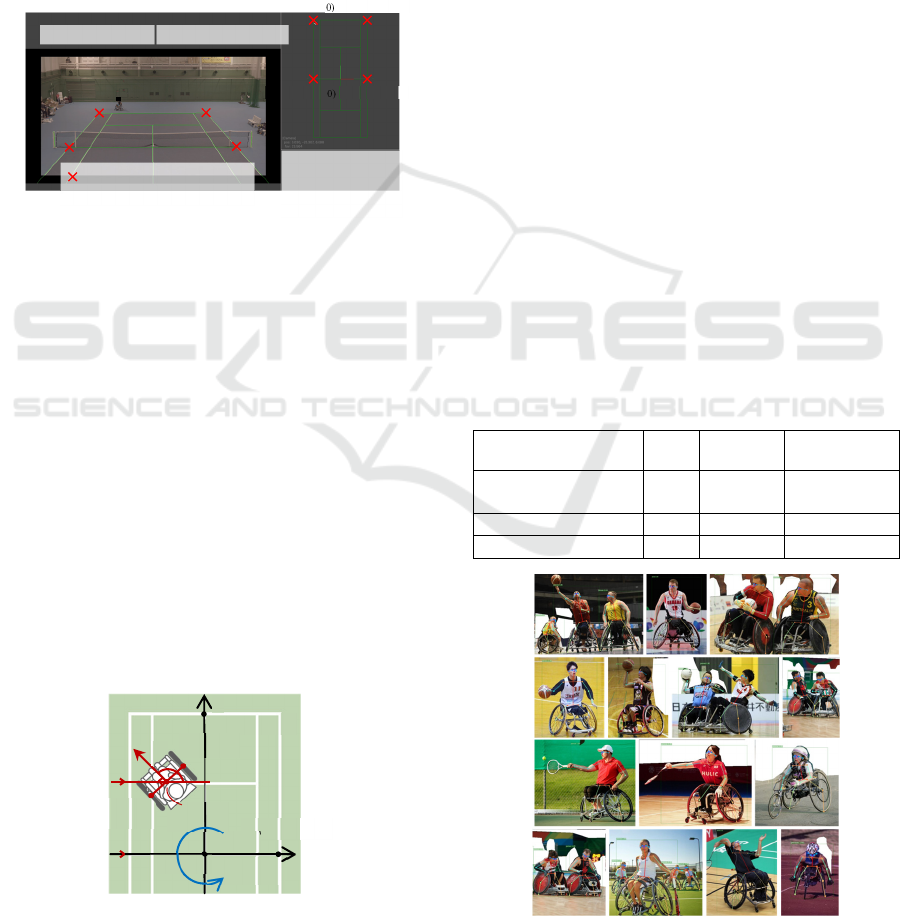
3.2.2 Camera Calibration
In this section, we describe the process of converting
the key point coordinates (i.e., the coordinates of the
bottom of each wheel) in the detected and tracked
video image into a global coordinate (i.e., the position
in the field).
We found that there was not possible to measure
the coordinates of the calibration points in real time,
and it was impossible to enter the target space for
tracking. Thus, it was necessary to calculate the
camera parameters from the feature points in the
game or practice fields captured by the camera.
The game and practice fields have feature points
whose length and size were specified by the
International Sports Federation’s regulation. Here,
the camera parameters were calculated based on these
feature points. Figure 6 shows an image illustrating
the calculation of camera parameters on a wheelchair
tennis court. The calibrator (i.e., the court model) was
created using the court information specified by the
regulations. Using this court model, the
corresponding points of the global coordinates were
mapped to pixel coordinates (at least four points) in
the image.
The external camera parameters indicating the
camera position and orientation in three-dimensional
space were calculated using the Levenberg–
Marquardt algorithm (Moré, 1978). The internal
Backbone
network
Feature map
Region proposal
network
Fixed size
feature map
Keypoint
branch
RGB
image
Keypoint
index
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
182
camera parameters indicating the focal distance of the
camera were calculated using the hill climbing
method (Goldfeld, 1966). Using these camera
parameters, the image-based coordinate points were
converted to global coordinate points, and by
exchanging the court model, it is possible to adapt the
algorithm to other sports.
The camera parameters were calculated using a
single frame in the video; thus, the method did not
support cases where the external camera parameters
changed in the same video (e.g., camera pan, tilt,
zoom, and position shift).
Figure 6: Camera calibration.
3.2.3 Positions and Directions Calculation
The two-dimensional (2D) position of each
wheelchair player on the field and the corresponding
wheelchair directions were calculated from the global
coordinates of the key points (i.e., the bottom of each
wheel). Figure 7 shows the coordinate frames in the
case of wheelchair tennis. The 2D position of the
wheelchair player
𝑥
, 𝑦
was calculated as the
midpoint of the bottom of each wheel.
𝑥
, 𝑦
𝑥
𝑥
2
⁄
, 𝑦
𝑦
2
⁄
(1)
The wheelchair direction angle θ was calculated as
follows. This represented the sagittal plane angle of
the wheelchair.
𝜃 𝑎𝑟𝑐𝑡𝑎𝑛𝑥
𝑥
/𝑦
𝑦
(2)
Figure 7: Example of global coordinate and direction in
wheelchair tennis.
4 RESULTS
4.1 Accuracy of Pose Estimation Model
We evaluated the accuracy of the detection models
developed (Section 3.1) on the wheelchair sports
dataset using the test data, which were not used for
training. Table 1 shows the error of each model. Here,
the unit is pixels. The results for the person’s posture
are the average of the errors for each key point (i.e.,
eyes, nose, ears, shoulders, elbows, wrists, and hips),
the results for the wheelchair structure are the average
of the errors for each key point (i.e., the centers and
bottoms of each wheel), and the results for the person
and wheelchair structure are the average of the errors
for all key points. For the human key point, the mean
absolute error (MAE) was 4.43 pixels. The widely
used methods for human posture estimation, Mask R-
CNN (He, 2017) and Open Pose (Cao, 2021), were
4.68 and 4.51 pixels. Thus, the MAE value obtained
by the proposed method was greater than that of the
existing methods. The proposed method improved the
estimation error by more than 1.7% compared to the
existing methods (He, 2017) (Cao, 2021). For the
wheelchair key points, the MAE was 6.22 pixels.
These results confirm that the proposed method can
be applied to various types of wheelchair sports,
scenes, and individuals, as shown in Figure 8.
Table 1: MAE between the estimated coordinates and
manually annotated coordinates (unit: pixels).
Human
p
ose
Wheelchair
p
ose
Human an
d
w
heelchai
r
p
os
e
Mask R-CNN
(He, 2017)
4.68 - -
OpenPose (Cao, 2021) 4.51 - -
Proposed metho
d
4.43 6.22 4.94
Figure 8: Examples of estimation results by the proposed
method (cropped to focus on wheelchair and humans).
↓
RGB ima
g
e Court model →
↑ Calculated
camera
parameters
Corresponding point
to global coordinates
(
-5.49
,
11.89
,
0
)
(
5.49, 11.89, 0
)
(
-5.49, 0, 0
)
(
5.49, 0, 0
)
𝑥
𝑦
360 𝑑𝑒𝑔
5.49, 0
0, 11.89
0, 0
0 𝑑𝑒𝑔
𝑥
, 𝑦
𝑥
, 𝑦
𝑥
, 𝑦
𝜃
Development of Monocular Vision-Based Tracking Method for Wheelchair Sports
183

4.2 Accuracy of Tracking Model
4.2.1 Data Collection
To evaluate the accuracy of the tracking model, an
experiment was conducted during the wheelchair
tennis matches. Six elite Japanese tennis players
participated in the study. The matches were held on
an indoor tennis court, and the players used the same
wheelchairs they typically use in competitions. The
players were divided into three groups and played one
game (singles match). The players were requested to
play with the same intensity as in international
competitions. Two cameras (Pocket Cinema Camera
4K by Blackmagic Design Pty. Ltd., Port Melbourne,
Australia) were placed at each corner of the tennis
court. The height of the camera position was
approximately 6 m. Each camera monitored half of
the court. The resolution was 4K, and the frame rate
was 60 fps. Present study was conducted in
accordance with the Declaration of Helsinki, and the
protocol was approved by the Ethics Committee of
Nagaoka University of Technology.
4.2.2 Accuracy of Player Detection
The tracking data of the wheelchair players were
output from the video images using the proposed
method. Figure 9 shows an example of the tracking
result. The player’s trajectory was overlaid on the
input image. Table 2 shows the detection rate of each
wheelchair player. As can be seen, the proposed
method was able to detect the wheelchair players in
all frames.
Figure 9: Image of the tracking results.
Table 2: Detection success rate of wheelchair player using
the proposed method.
Total data [s]
Detection
data
[
s
]
Detection rate
[
%
]
Pla
y
er 1 2650 2650 100
Pla
y
er 2 2650 2650 100
Pla
y
er 3 2300 2300 100
Pla
y
er 4 2300 2300 100
Pla
y
er 5 2900 2900 100
Pla
y
er 6 2900 2900 100
All 15700 15700 100
4.2.3 Accuracy of Player Position
The positions of the wheelchair players were
calculated using the proposed method. The videos
were also digitized manually as reference values for
validation. Here, for each player, 120 frames were
selected randomly, and the bottoms of each wheel
were digitized manually. The midpoint of each wheel
was taken as the true value, and the coordinate
transformation by the camera calibration was the
same the proposed method. Table 3 shows the
position determination errors of the proposed method
(coordinate frames - according to Figure 7). The
MAE in the horizontal direction (x) was 0.03 m, in
the depth direction (y) was 0.10 m, and the root mean
square error (RMSE) was 0.11 m. The values of "All"
in Table 3 were calculated from all data of all players.
Table 3: Position determination errors of our method.
MAE x
[
m
]
MAE
y
[
m
]
RMSE
[
m
]
Pla
y
er 1 0.03 0.09 0.10
Pla
y
er 2 0.03 0.09 0.10
Pla
y
er 3 0.03 0.14 0.15
Pla
y
er 4 0.02 0.09 0.09
Pla
y
er 5 0.03 0.09 0.10
Pla
y
er 6 0.03 0.12 0.12
All 0.03 0.10 0.11
4.2.4 Accuracy of Wheelchair Direction
The wheelchair motion directions of the players were
calculated using the proposed method. As in the
evaluation of the positional errors, here, the true
values of the wheelchair directions were calculated by
digitized manual data. Table 4 shows the wheelchair
directions errors of the proposed model, and the
coordinate system is shown in Figure 7. As can be
seen, the mean ± SD was −2.23 ± 8.57 degrees, and
the MAE was 6.78 degrees. The values of "All" in
Table 4 were calculated from all data of all players.
Table 4: Wheelchair direction error of our method.
Mean ± SD
[
de
g]
MAE
[
de
g]
Pla
y
er 1 −3.22 ± 8.65 7.82
Pla
y
er 2 −2.48 ± 9.89 8.02
Pla
y
er 3 −2.80 ± 8.71 7.13
Pla
y
er 4 −0.40 ± 7.98 6.34
Pla
y
er 5 −0.73 ± 8.32 6.61
Pla
y
er 6 −3.75 ± 7.05 6.46
All −2.23 ± 8.57 6.78
trajectory over the
p
ast 0.5 seconds
RGB ima
g
e
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
184

5 DISCUSSIONS
We found that the proposed method estimated the
wheelchair structure with the same accuracy as
existing human posture estimation models, as shown
in Table 1. Note that the constructed wheelchair
sports dataset includes images of wheelchair
basketball, rugby, tennis, badminton, and track and
field; thus, the proposed method provides tracking
data for a wide variety of wheelchair sports. In
addition to wheelchair structure, the proposed model
estimates the player’s upper body posture. In addition
to measuring the wheelchair player positions, it is also
possible to analyze the upper body movements. For
example, the proposed method could be used to
evaluate the wheelchair rowing motion. Also, it
would be possible to analyze the relationship between
the upper body usage and chair work skill using the
proposed method.
As shown in Table 2, the detection success
accuracy for wheelchair players were 100%. In a
previous study (Sarro, 2008), the detection
successrate of wheelchair rugby players using a video
camera was approximately 74%, and that of
wheelchair soccer players was approximately 94%.
The proposed method demonstrates higher accuracy
than previous study, and it achieved the accuracy
required for use in sports.
The RMSE of the positions determinated by the
proposed method was 0.11 m, as shown in Table 3.
When using an LPS in wheelchair sports, the MAE
was 0.19–0.32 m in wheelchair rugby and wheelchair
basketball, respectively (Rhodes, 2014), and the
MAE was 0.37 m for wheelchair tennis (Perrat, 2015).
The results obtained for the proposed method indicate
that it outperforms these existing methods in terms of
accuracy.
In this study, the position accuracy was evaluated
in wheelchair tennis. The proposed method can be
applied to other wheelchair sports by exchanging the
court model for camera calibration. The proposed
method is an innovative tracking system that does not
require base stations or devices attached to the players,
and it can realize high position detection accuracy
using only a single camera.
The MAE of the wheelchair directions tracked by
the proposed method was 6.78 degrees, as shown in
Table 4. Methods based on a single IMU sensor are
widely used to measure wheelchair directions. For
example, previous studies reported 8.1 degrees (van
Dijk, 2022) and 11.0 degrees (Rupf, 2021). Thus, the
proposed method outperforms methods based on a
single IMU sensor. In addition, to the best of our
knowledge, the proposed method is the first based on
a monocular camera. Thus, the proposed method
provides a simplified novel tool to obtain kinematic
data for wheelchair sports.
The proposed method provides the movement
information of wheelchair players using a single
camera placed at the side of the field or near audience
seats. Thus, it is useful for training load management
and evaluating on-court performance. In addition, for
competitive sports, the proposed method can be used
to acquire kinematic data of opponents to improve the
analysis of tactics.
The proposed method can be applied to the analysis
of past legendary players and to compare the past and
current performance of the same player, even if it is
not possible to acquire new data using the tracking
system. We believe that our findings contribute to the
quantitative performance evaluation of wheelchair
athletes.
Finally, we describe the limitations observed in this
study. We found that the proposed method exhibits a
larger error in the depth direction than in the
horizontal direction due to the single camera (Table
3). In addition, the position error increases when the
number of pixels per wheelchair player decreases.
Thus, with the proposed method, it is necessary to
consider the image acquisition conditions. In this
study, the evaluation was conducted for singles
wheelchair tennis; thus, the accuracy may decrease
according to the overlap of wheelchair players.
Therefore, in the future, we plan to evaluate the
proposed method when multiple players are present
on the same field.
6 CONCLUSIONS
In this study, we developed a tracking method to
measure the kinematic data of wheelchair sports using
a monocular camera. With the proposed method, the
RMSE of the wheelchair player position was 0.11 m,
and the MAE of the wheelchair direction was 6.78
degrees. In addition, the proposed method achieved
higher accuracy than existing tracking methods, e.g.,
the LPS and IMU sensor–based methods. The
proposed method provides a simple tool to obtain
kinematic data in wheelchair sports, which have not
been collected previously. This research contributes
to the quantitative performance evaluation of
wheelchair athletes.
Development of Monocular Vision-Based Tracking Method for Wheelchair Sports
185

ACKNOWLEDGEMENTS
This work was supported by the "Functional
Development Project for Resilient Athlete Support"
of Japan Sports Agency.
REFERENCES
Buric, M., Ivasic-Kos, M., & Pobar, M. (2019). Player
tracking in sports videos. Proceedings of the
International Conference on Cloud Computing
Technology and Science, 334–340.
Cao, Z., Hidalgo, G., Simon, T., Wei, S. E., & Sheikh, Y.
(2021). OpenPose: Realtime Multi-Person 2D Pose
Estimation Using Part Affinity Fields. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 43(01), 172–186.
Dai, A. M., & Le, Q. V. (2015). Semi-supervised Sequence
Learning. Advances in Neural Information Processing
Systems, 28.
Goldfeld, S. M., Quandt, R. E., & Trotter, H. F. (1966).
Maximization by Quadratic Hill-Climbing.
Econometrica, 34(3), 541.
Grogan, A. (2012). Paralympic technology. Engineering
and Technology, 7(8), 28–31.
Halson, S. L. (2014). Monitoring Training Load to
Understand Fatigue in Athletes. Sports Medicine, 44(2),
139–147.
He, K., Gkioxari, G., Dollar, P., & Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE
International Conf. on Computer Vision, 2961–2969.
Kingma, D. P., & Ba, J. L. (2014). Adam: A Method for
Stochastic Optimization. 3rd International Conference
on Learning Representations.
Laferrier, J. Z., Rice, I., Pearlman, J., Sporner, M. L.,
Cooper, R., Liu, T., & Cooper, R. A. (2012).
Technology to improve sports performance in
wheelchair sports. Sports Technology, 5(1–2), 4–19.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Dollár, P., & Zitnick, C. L. (2014).
Microsoft COCO: Common objects in context.
European Conf. on Computer Vision, 8693, 740–755.
Linke, D., Link, D., & Lames, M. (2020). Football-specific
validity of TRACAB’s optical video tracking systems.
PLOS ONE, 15(3), e0230179.
Mason, B. S., Porcellato, L., Van Der Woude, L. H. V., &
Goosey-Tolfrey, V. L. (2010). A qualitative
examination of wheelchair configuration for optimal
mobility performance in wheelchair sports: a pilot study.
Journal of Rehabilitation Medicine, 42(2), 141–149.
Moré, J. J. (1978). The Levenberg-Marquardt algorithm:
Implementation and theory. Numerical Analysis, 105–
116.
Pansiot, J., Zhang, Z., Lo, B., & Yang, G. Z. (2011).
WISDOM: wheelchair inertial sensors for displacement
and orientation monitoring. Measurement Science and
Technology, 22(10), 105801.
Perrat, B., Smith, M. J., Mason, B. S., Rhodes, J. M., &
Goosey-Tolfrey, V. L. (2015). Quality assessment of an
Ultra-Wide Band positioning system for indoor
wheelchair court sports. Proceedings of the Institution
of Mechanical Engineers, Part P: Journal of Sports
Engineering and Technology, 229(2), 81–91.
Perret, C. (2017). Elite-adapted wheelchair sports
performance: a systematic review. Disability and
Rehabilitation, 39(2), 164–172.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You Only Look Once: Unified, Real-Time Object
Detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, 779–788.
Redwood-Brown, A., Cranton, W., & Sunderland, C.
(2012). Validation of a real-time video analysis system
for soccer. International Journal of Sports Medicine,
33(8), 635–640.
Rhodes, J., Mason, B., Perrat, B., Smith, M., & Goosey-
Tolfrey, V. (2014). The validity and reliability of a
novel indoor player tracking system for use within
wheelchair court sports. Journal of Sports Sciences,
32(17), 1639–1647.
Rupf, R., Tsai, M. C., Thomas, S. G., & Klimstra, M. (2021).
Original article: Validity of measuring wheelchair
kinematics using one inertial measurement unit during
commonly used testing protocols in elite wheelchair
court sports. Journal of Biomechanics, 127.
Sarro, K. J., Misuta, M. S., Burkett, B., Malone, L. A., &
Barros, R. M. L. (2010). Tracking of wheelchair rugby
players in the 2008 Demolition Derby final. Journal of
Sports Sciences, 28(2), 193–200.
Shepherd, J. B., James, D. A., Espinosa, H. G., Thiel, D. V.,
& Rowlands, D. D. (2018). A Literature Review
Informing an Operational Guideline for Inertial Sensor
Propulsion Measurement in Wheelchair Court Sports.
Sports 2018, 6(2), 34.
an der Slikke, R. M. A., Berger, M. A. M., Bregman, D. J.
J., & Veeger, H. E. J. (2016). From big data to rich data:
The key features of athlete wheelchair mobility
performance. Journal of Biomechanics, 49(14), 3340–
3346.
van der Slikke, R. M. A., Mason, B. S., Berger, M. A. M.,
& Goosey-Tolfrey, V. L. (2017). Speed profiles in
wheelchair court sports; comparison of two methods for
measuring wheelchair mobility performance. Journal
of Biomechanics, 65, 221–225.
van Dijk, M. P., van der Slikke, R. M. A., Rupf, R.,
Hoozemans, M. J. M., Berger, M. A. M., & Veeger, D.
J. H. E. J. (2022). Obtaining wheelchair kinematics with
one sensor only? The trade-off between number of
inertial sensors and accuracy for measuring wheelchair
mobility performance in sports. Journal of
Biomechanics, 130, 110879.
Zhang, Y., Chen, Z., & Wei, B. (2020). A Sport Athlete
Object Tracking Based on Deep Sort and Yolo V4 in
Case of Camera Movement. 2020 IEEE 6th
International Conf. on Computer and Communications,
1312–1316.
Zhang, Y., Sun, P., Jiang, Y., Yu, D., Weng, F., Yuan, Z.,
Luo, P., Liu, W., & Wang, X. (2022). ByteTrack: Multi-
object Tracking by Associating Every Detection Box.
European Conf. on Computer Vision, 13682, 1–21.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
186
