
Comprehensive Φ-Bonacci Index for Walking Ability Assessment in
Paroxysmal Positional Vertigo: Role of Rehabilitation
Nicol´o Colistra
1,∗
, Luca Pietrosanti
1
, Mohamed El Aray shi
1
, Sara Maurantonio
2
,
Beatrice Francavilla
2
, Piergiorgio Gia comini
2
and Cristiano Maria Verrelli
1
1
Department of Electronic Engineering, University of Rome Tor Vergata, Via del Politecnico 1, 00133 Rome, Italy
2
Division of Ot olaryngology, University Hospital of Rome Tor Vergata, Viale Oxford 81, 00133 Rome, Italy
Keywords:
Gait Analysis, Walking Gait, Asymmetry, Self-Similarity, Golden Rat io, Benign Paroxysmal Positi onal
Vertigo.
Abstract:
Very recent research directions have been devoted t o providing a theoretical foundation to the experimental
evidence that human movements, such as walking, are able to induce time-harmonic motor patterns. The re-
sulting findings have shown that such harmonic structures are characterized by the golden ratio occurring as
the ratio of the durations of the walking gait sub-phases that compose generalized F ibonacci sequences. A
new comprehensive gait index, named Φ-bonacci gait number, and a new related experimental conjecture –
concerning the position of the foot relative to the tibia – have been concurrently proposed to capture the most
reliable and objective (quantitive) outcome measures (and their distortions in pathological subjects) of recur-
sivity, asymmetry, consistency, and self-similari ty (harmonicity) of the gait cycle. This paper provides, for
the first time, experimental results on healthy and pathological gaits – related to benign paroxysmal positional
vertigo (BPPV) – that fully support the aforementioned theoretical derivations.
1 INTRODUCTION
Starting from the evidence that foot off reliably occurs
at 60% to 62% of a physio logical gait at a comf ortable
speed, it has been shown by (Iosa et al., 2013) that in
(symmetrical and recursive) walking of healthy sub-
jects – being described by fo ur time intervals –, but
not in pathological ones, the ratio between consec-
utive durations of swing and double support phases
is close to the go lden ratio φ value at a comfort-
able speed of 4 km/h (Cavagna and Margaria, 19 66).
Such an irrational number φ = (1 +
√
5)/2 ≈ 1.618
(φ
−1
= φ −1), which is related to Euclid’s pr oblem
of cutting in a self-proportional way a given straight
segment, captures self-similarity (harmon ic ) features
in symmetric walking of healthy subjects (Iosa et al.,
2019), and a reduction of the smooth, gracefu l, and
melodic flow of movement in the altered gait of pa-
tients (Iosa et al., 2016) (see the related discussions in
(Verrelli et al., 2 021; Marino et al., 2020)). Further-
more, human walking naturally includes asymmetr ic
and non-recursive components, especially in patho-
logical cases, so at least eight (in place of four) time
intervals have to be considered for left and right lower
∗
Corresponding author.
limbs, namely doub le support, swing, stance, and gait
cycle (Dugan and Bhat, 2005). This has been actu-
ally don e in (Verrelli et al., 2021), where the dura-
tions of those eight time intervals have bee n demon-
strated to concern a newly defined composite gait cy-
cle, which involves two specific couple of overlapping
(left and right) gait cycles. Indeed , the dynamics-
on-graph concepts- and generalized finite-length Fi-
bonacci sequences- based ana lysis presented in (Ver-
relli et al., 2021) has generalized the one in (Iosa et al.,
2013)
1
, as much as the new quantitative index of (Ver-
relli et al., 2021) – namely, the Φ-bonacci gait num-
ber – has constituted the most straightforward gen-
eralization of the gait ratio in (Iosa et al., 2013) to
the case in which non-{symmetric & recursive}com-
ponen ts of walking (including the concep t of dou-
ble support consistency) oc cur. Furthermore, differ-
ently from the ar ea of the Synchronicity Rectangle
in ( Marino et al., 2020), such a new index takes its
minimum zero-value just when the strongest version
of self-similarity, namely the enforced adjoint sym-
1
Differently from (Marino et al., 2020), no complex
tools from linear algebra, associating special φ-dependent
subspaces with a common temporal model for human walk-
ing gaits, are employed.
Colistra, N., Pietrosanti, L., El Arayshi, M., Maurantonio, S., Francavilla, B., Giacomini, P. and Verrelli, C.
Comprehensive Φ-Bonacci Index for Walking Ability Assessment in Paroxysmal Positional Vertigo: Role of Rehabilitation.
DOI: 10.5220/0012237100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 203-210
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
203

metric self-similarity, o c curs. It is able to unveil hid-
den time-harmonic and self-similar structures along
the new direc tion toward a fractal human walking de-
composition. The a bove index
2
, has also innovatively
involved a term relying on a new experimental con-
jecture that relies on the position of the foot relative
to the tibia while op ening new a nalysis and diagno-
sis perspectives on the internal a nalysis of the do u-
ble support phase. The resulting theoretical approach
thus moves along the direction of using temporal gait
analyses to complement, in c linical or general per-
formance evaluations the classical gait analyses in-
cluding motion analysis, dynam ic electromyography,
force plate recordings, e nergy cost measurements or
energetics, measurement of stride characteristics.
Now, even though the Φ-bonacci gait number is
able to comprehensively capture the m ost reliable and
objective (quantitive) outco me measures of recursiv-
ity, asymmetry, consistency, and self-similarity (har-
monicity) of the gait cycle, however, up to this stage,
only two different simplified versions of such an in-
dex have been tested: i) in (El Ar a yshi et al., 2022),
concerning the distinction between patients affected
by Ataxia Telangiectasia and th eir healthy counter-
parts, no internal analysis of the double support phase
has be en performed; in (Verrelli et al., 2021), con-
cerning patients with highly a symmetric deficits (such
as patients with hemiparetic stroke and patients with
an alteration in gait ratio not always being acco m-
panied by motor asymmetries [such as patients with
quite symmetric symptoms due to Parkinson’s Dis-
ease]), data concerning the adjoint gaits are neglected.
In this paper, we thus illustrate, for the first time
in the literature, not only the effectiveness of th e com-
plete version of the aforementioned index in discrim-
inating healthy subjects from pathological ones, but
also its responsiveness in quantifying patients’ im-
provements coming from rehabilitation. To this aim,
we have recruited a cohort of patients with BPPV,
i.e., a peripheral vestibular disorder leading to b al-
ance difficulties and increased fall risks (Zhang et al.,
2021). Such BPPV patients suffer from transient ver-
tigo and nystagmus, leading to balance impairm e nts
and incre a sed fall risk , so their treatment typically in-
volves a canalith reposition maneuver, practiced by
expert physicians, and requires, at least, two weeks
to have an appreciable effect. These featu res promote
them as g ood candida te s to be tested, before and after
the repositioning maneuver, in order to show that the
Φ-bonacci gait number, in its complete version, repre-
sents a mea ningful index, capable of explicitly quan-
2
Even though it can be naturally extended to even as-
sess gait index variability along past walking gaits, this is
how ever out of the focus of this paper.
tifying and detecting the recovery level and improve-
ments due to rehabilitation. Experimen ta l results con-
firm such a conjecture.
2 MATERIALS AND METHODS
This section r ecalls the concept of com posite gait cy-
cle and the notions of recursivity, harmonicity, sym-
metry, and double support consistency as d efined in
(Verrelli et al., 2021 ). It also reports the mathemat-
ical expression of the Φ-bonacci ga it numbe r, in its
complete and simplified versions. Methods are then
described, along with the experimental setup and the
data acquisition modality. Finally, the main features
of the participants are introduced and the results com-
ing from the statistical analysis are reported.
2.1 Φ-Bonacci Sequence-Based Indices
Consider a walking gait (Iosa et al., 2013; Verrelli et
al., 2021) and let: GC stand for gait cycle; HS stand
for heel-strike; T O stand for toe-off; r and l stand for
right and left, respectively; ad j stand for adjoint; ST
stand for stance; SW stand for swing; DS stand for
double support. In Figure 1, a comprehensive mode l
of the composite gait cycle in (Verrelli et al., 2021),
which involves two specific couples of overlap ping
gait cycles, namely the left and right gait cycles (GCl
and GCr) and the adjoint right a nd left gait cycles
(GCr
ad j
and GCl
ad j
), is shown. For the sake of clar-
ity, STr, STl, SWr, and SWl represent the right and
left stance phase durations and the right and left swing
phase d urations, respec tively. Moreover, the dura-
tions DSr and DSl of the r ight and left double support
phase satisfy DSr = DSx + DSy, DSl = DSy + DSz,
with DSx, DSy, DSz being graphically defin e d in Fig-
ure 1. Accordingly, the equal partition of the double
support sub-phases, i.e., DSx = DSy (and DSw = DSy,
DSy = DSz in Figure 1) involves the concept of dou-
ble support consistency. The same duration s for the
adjoint right and left gait cycles, denoted by STradj,
STladj, SWradj, SWladj, DSradj, and DSladj, are re-
ported in Figure 1. Now, Verrelli et al. (2021) have
innovatively c haracterized the aforementione d com-
posite gait cycle by means of a new mathematical and
meaningful index, namely the Φ-bonacci gait number,
which relies, in its self-similar kernel, on generalized
finite-length Fibona cci sequences, exploiting the ro le
of the golden ratio φ. Spe cifically, the complete ver-
sion of such an ind ex, here called Y
φ
and r eported in
(10) of (Verrelli et al., 2021), has relied on a new ex-
perimental conjecture concerning an extended fractal
walking decomposition paying attention to the posi-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
204

Figure 1: Composite gait cycle: right and left gait cycles and adjoint right and left gait cycles.
tion of the f oot relative to the tibia. It turns out to
constitute the most n atural generalization, to the non-
{symmetric & recursive} walking case, of the cor-
respond ing gait ratio |SW/DS − φ| defined in (Iosa
et al., 2013; Iosa et al., 20 16) for symmetric walk-
ing, while it simply incorporates a weighted modi-
fication of the index = |∆SW|/SW in (Bła˙zkiewicz
et al., 2014), evaluated at both the g a it and the ad-
joint gait. The corresponding two simplified versions,
here called s1-Φ-bonacci gait number Y
φ
[s1] and s2-
Φ-bonacci gait number Y
φ
[s2], have appeared in (6)
of El Arayshi et al. (2022) and in (11) of Verrelli et
al. (2021) , respectively. They are reported in Table I,
where λ, δ, µ
adj
, λ
adj
, ν
conj
are positive weights
3
and
the normalized quantity is given by:
ξ
n
ξ
d
−ξ
v
2
n
=
ξ
n
ξ
d
−1
ξ
n
ξ
d
−ξ
v
2
(1)
in terms of positive reals ξ
n
, ξ
d
, ξ
v
(where n generi-
cally stands for numerator, d stands for denominator,
v stands for value), whereas the p ositive real numbers
z
1
, z
2
, z
3
denote the time distance s the correspon d-
ing left or right heel-strikes and toe-off instants of the
three time instants re presenting the three instants of
minimum angular p ositions (with negative signs) of
the (left and right) fe et relative to the tibias (with a 90
degrees-angle between foot and tibia being p lotted at
0-degrees).
Values close to 0 for the ab ove complete or sim-
plified indices describ e different levels of recursivity,
3
Such weights play the role of gains. They can be freely
chosen by the user, in accordance wi th the specific analysis
requirements.
self-similarity (harmonicity), swing symmetry, and
double supp ort consistency, depending on the level of
terms neglected in the index computation. Values far
from 0 typically refer to pathological gaits.
Remark 2.1. The conjecture used in the above in-
dices (see (Verrelli et al., 2021)) extends the ideas
underlying a fractal approach to the double support
sub-phases within the gait. It is inspired by the exper-
imental results reported in (Novacheck, 1998) show-
ing that physiological symmetric walking is not only
characterized by a stan ce duration being close to 62%
of gait cycle duration, a swing d uration being close
to 38% of gait cycle duration, a double support du-
ration being consequently c lose to 24% of gait cy-
cle duration, but also by an in sta nt of minimum an-
gular position (with negative sign ) of the foot rel-
ative to the tibia (with a 90 degree s-angle between
foot and tibia be ing plotted at 0-degrees) occurring at
about 7% of gait cycle du ration in each doub le sup-
port sub-phase (with 5% as percentage for the com-
plementary interval duration). It may thus be inter-
estingly recognized that the structure of a Fibonac ci
sequence (with fixed point φ) appears in the sequence:
5 × 2 = 10 (1/φ
5
≈ 9.018); 7 × 2 = 14 (1/φ
4
≈
14.591); 24 (1/φ
3
≈ 23 .608); 3 8 (1/φ
2
≈ 38.19 8);
62(1/φ ≈ 61 .804); 100.
2.2 Subjects, Data Acquisition, and
Experimental Protocol
Patients affected by BPPV (n = 7, age = 55.6 ±5 .3)
were asked to perform 20-meters-walking tests in a
Comprehensive Φ-Bonacci Index for Walking Ability Assessment in Paroxysmal Positional Vertigo: Role of Rehabilitation
205

Table 1: Mathematical expressions for the Φ-bonacci gait number and its simplified versions.
Y
Φ
=
s
SW
l
DS
r
−φ
2
n
+
SW
r
DS
l
−φ
2
n
+ µ
adj
SW
adj
r
DS
adj
l
−φ
2
n
+ λ
r
SW
r
SW
l
−1
2
n
+ λ
adj
SW
adj
r
SW
r
−1
2
n
+ν
conj
r
DS
r
z
1
+z
2
−φ
2
n
+
DS
l
z
2
+z
3
−φ
2
n
+ δ
r
DS
x
DS
y
−1
2
n
Y
Φ
[s1] =
s
SW
l
DS
r
−φ
2
n
+
SW
r
DS
l
−φ
2
n
+ µ
adj
SW
adj
r
DS
adj
l
−φ
2
n
+ λ
r
SW
r
SW
l
−1
2
n
+ λ
adj
SW
adj
r
SW
r
−1
2
n
+δ
r
DS
x
DS
y
−1
2
n
Y
Φ
[s2] =
r
SW
l
DS
r
−φ
2
n
+
SW
r
DS
l
−φ
2
n
+ λ
r
SW
r
SW
l
−1
2
n
+ δ
r
DS
x
DS
y
−1
2
n
hallway, at the ir c omfortable speed, before and af-
ter the canalith repositioning maneuver. For com-
parison, age-matched healthy control subje cts (HCS)
(n = 6, age = 59.4 ±7.3) were asked to perform, at
their co mfortable speed, a single 20-meter-walking
test. HCS we re asked about their history of dizziness,
lightheade dness, balance problem s, and other symp-
toms similar to the ones exhibited by the BPPV pa-
tients in the past six months. All the subjects were
required to wear th e wearable sensors of the motion
capture system Movit System G1 (Captiks, Rome,
Italy) for movement capture and analysis (see (El
Arayshi et al., 2022)). The Movit System G1 provides
accelerometer, gyroscope, magnetometer, quaternion,
and barometer synced data and is composed of 13-
DOF wireless light-weight wearable small iner tial de-
vices and an USB wirele ss receiver (Costantini et al.,
2018, Ricci et al., 2019b, Ricci et al., 2019a). The
Motion Studio & Motion Analy zer software, to be
used in conjunction with the aforementioned data ac-
quisition system, is then respectively used to collect
the movement da ta from each sensor and fuse/process
sensors data to generate the .csv files of the c onsec-
utive time instants of the HS and T O for the left and
right foot, in addition to the an a tomical angles, which
are used to obtain information on the position of the
foot (left and right) relative to the tibia.
2.3 Data and Statistical Analysis
The temporal gait parameters, obtained from Motio n
Analyzer from the r aw senso rs data fusion and pro-
cessing operations, were loaded on a custom-made
MATLAB (The Mathworks, Natick, MA, USA) algo-
rithm that recognizes the time instants of HS and TO
for the left and right foot belo nging to the (left an d
right) gait cycle and the adjoint gait cycle subphases
and involved in the computatio n of the Φ-bona c ci gait
number (all th e weights therein were set equal to 1).
The developed MATLAB algorithm automatically al-
lows for the computation of the values of Y
φ
, Y
φ
[s1],
and Y
φ
[s2] corresponding to all the composite gait cy-
cles detected in the full walking event for each sub-
ject. To reduce the effect of measurement errors of
the sensors and possible transient behaviors of the
gait, the algorithm just considered the composite gait
cycles belonging to the middle of the walking event,
along with the immediately previous and subsequent
gait cycles. Statistical analyses an d data visualization
were performed using GraphPad Prism Software Ver-
sion 9. The reported results involve the average of
the in dices computed over the three gait cycles be-
longing to the middle of the walking event for each
subject. Since data do not follow a normal distribu-
tion (evaluated by the Kolmogorov- Smirn ov normal-
ity test), a non-parametric Mann-Whitney U test was
used to find differences between the mean values of
each pair of samples. Statistical analyses were con-
sidered significant in all cases when the p-values were
less than 0.05. Moreover, for the evaluation of the in -
dices as diagno stic test receivers, operating character-
istic curve (ROC) analyses [Wilson/Brown method]
were performed; index accuracy was measured by the
area under the ROC curve (AUC). If the AUC value
was greater than 0.5, the test was considered signifi-
cant. We considered the Youden in dex with likelihood
ratio LR= Sensitivity / (1 - Specificity) > 2 as a crite-
rion for ch oosing the optimal threshold value for the
ROC curve, na mely the thresh old value c for which
the quantity Sensitivity + Specificity - 1, evaluated at
c, is the largest one.
3 RESULTS AND DISCUSSION
Up to now, studies have shown how gait phases are a
reliable and valid measure for the assessment of sub-
jects’ walking ability. In addition, gait phase changes
have been reported in patients affected by several neu-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
206
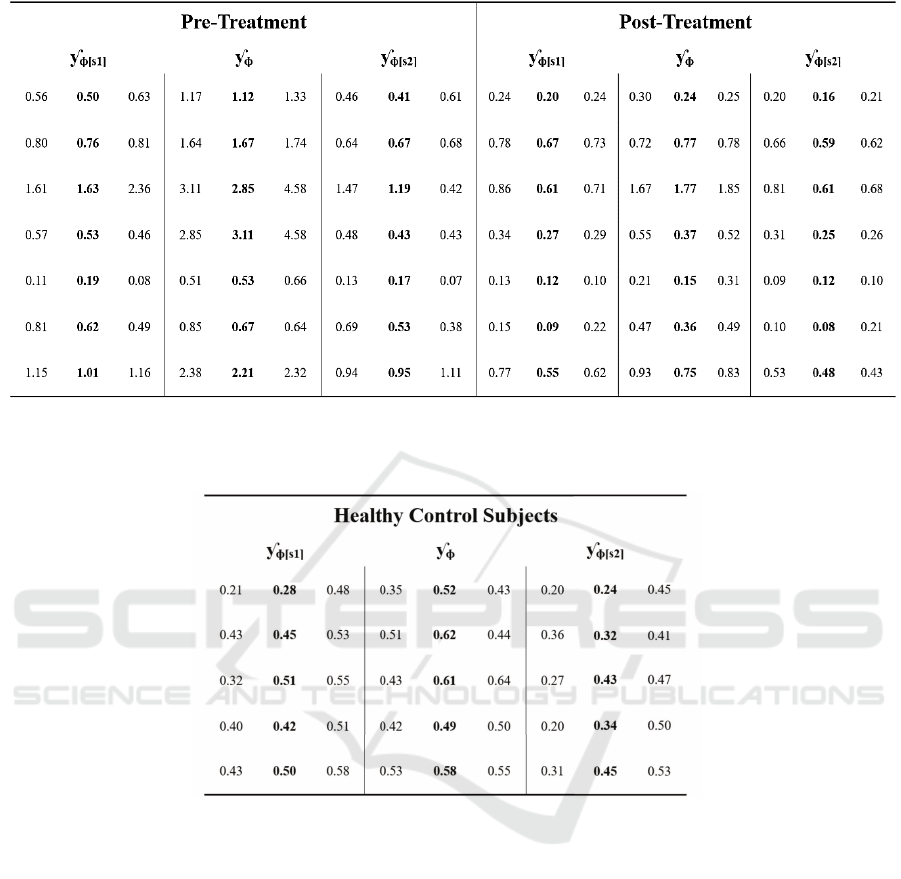
Figure 2: Φ-bonacci gait number Y
φ
and its simplified versions Y
φ
[s1], Y
φ
[s2], computed for each subject (n = 7, each row)
with BPPV before and after the patient treatment and evaluated at three subsequent stages (i −1,i,i + 1) [i = gait cycle in the
middle of the walking event ( bold values)].
Figure 3: Φ-bonacci gait number Y
φ
and its simplified versions Y
φ
[s1], Y
φ
[s2], computed for each healthy subject (n = 5, each
row) and evaluated at three subsequent stages (i −1,i,i + 1) [i = gait cycle in t he middle of the walking event (bold values)].
rodegenerative diseases or disorders after rehabilita-
tive interventions (Jonsdottir et al., 2 020; Leone et al.,
2018). In lig ht of those findings, we were encouraged
to investigate the capability of the new indices r e-
ported in the previous section to be successfully used
in clinical settings and thus, to exhibit responsiveness
to (even small) changes coming fro m rehabilitation
(see (Verrelli e t al., 2021 ) fo r a comparison with clas-
sical indice s such as Mean Gait Ratio MGR and Sym-
metry Index SI).
The values of Y
φ
, Y
φ
[s1], Y
φ
[s2] – computed for
each HCS and each BPPV patient before and after the
canalith repo sitioning maneuver and evaluated at the
gait cycle (i) in the middle of the walking event and
at the immediately previous (i −1) and subsequent
one (i + 1) – appear in the tables belonging to Figures
2 and 3. Figures 4 and 5 report the corresponding
mean ± SD. They assess a certain level of stability of
the measurement, for both th e HCS and the patients.
For the first time in the literature, data of Figure 6-8
illustrate h ow the Y
φ
[largely better than its simplified
versions Y
φ
[s1], Y
φ
[s2]] is able to distinguish healthy
subjects from pathological ones better than the
correspo nding simplified indices. In particular, the
ROC analysis and the AUC being obtained using
Y
φ
observed in BPPV patients and controls shows
that such a comprehensive index – when used as a
diagnostic test – displays a great accuracy (in terms of
sensitivity & specificity, as well a s of p-value, AUC
and Likelihoo d Ratio) in distinguishing between
BPPV patients and healthy subjects: ROC curve
related to Y
φ
for the evaluation of the index as a
Comprehensive Φ-Bonacci Index for Walking Ability Assessment in Paroxysmal Positional Vertigo: Role of Rehabilitation
207
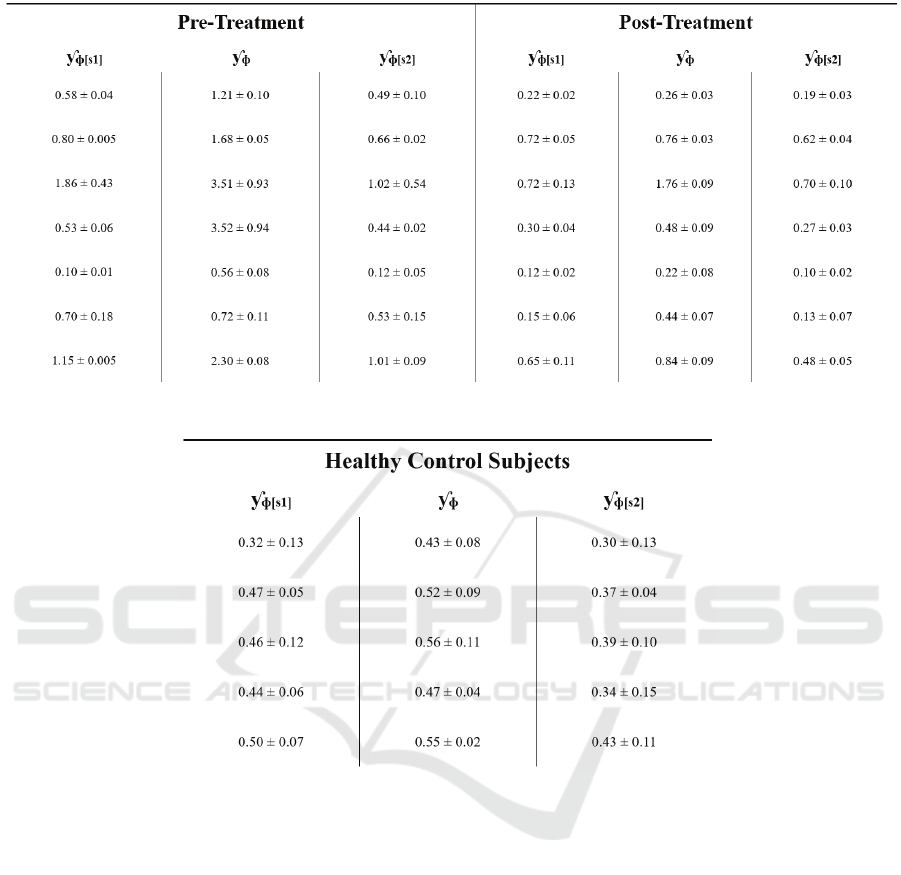
Figure 4: Mean ± SD of Φ-bonacci gait number Y
φ
and its simplified versions Y
φ
[s1], Y
φ
[s2], for data appearing in Figure 2.
Figure 5: Mean ± SD of Φ-bonacci gait number Y
φ
and its simplified versions Y
φ
[s1], Y
φ
[s2], for data appearing in Figure 3.
diagnostic te st. AUC=1.000; 95% confidence inter-
val AUC=[1.000, 1.000 0]; p-value AUC =0 .0045;
cut-off value ROC=0.5577; Sensitivity at cut-off
value=100%; 95% CI=[64.57%,100.0%]; Specificity
at cut-off value=80%, 95% CI=[37.55%,98.97%];
Likelihood Ratio (LR)=5.00. Such accura te results
are not achieved when the simplified versio ns of
index Y
φ
are used, instead (see Figur e s 7 a nd 8).
Quantification o f the recovery level of each BPPV
patient after the c analith repositioning maneuver can
be taken from Figure 4. Specifically, Y
φ
, Y
φ
[s1],
and Y
φ
[s2] values show a reduction for each patient
in post-treatment c ondition, highlighting a different
recovery level of healthy harm onic and symmetric
components among the patients and thus, point out
the in dices ab ility to dete ct and quantify individual
improvements due to rehabilitation. In particular,
the perc entage-variation ((post.treatment.value −
pre.treatment.value)/pre.treatment.value) ∗ 100%
for Y
φ
of each patien t reads: Patient 1: -78%, Patient
2: - 55%, Patient 3: -50%, Patient 4: -8 6%, Patient 5:
-61%, Patient 6 : -39%, Patient 7: - 63%.
4 CONCLUSIONS
The experimen ta l results on healthy and pathological
gaits related to BPPV of Section 3 illustrate how the
new comprehensive Φ-bonacci gait number of Table I
(better than its simp lified versions) is able to capture
the most reliable and o bjective (quantitive) outcome
measures of recursivity, asymmetry, consistency, and
self-similarity ( harmonicity) of the g a it cycle (and
their distortions in pathological subjects), as well as
of r ehabilitation- based recovery effects.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
208

Figure 6: (a) mean ± SEM of the average Y
φ
values
computed for BPPV patients (before and after the treat-
ment) and healthy controls subjects (HCS): n = 7 (BPPV
patients), n = 5 (HCS) . p-values are calculated using
the Mann-Whitney U test, ∗∗ : p < 0.01, ns: not signifi-
cant. b) ROC curve related to Y
φ
for the evaluation of
the index as a diagnostic test. AUC=1.000; 95% con-
fidence interval AUC =[1.000, 1.0000]; p-value AUC =
0.0045; cut-off value ROC=0.5577; Sensitivity at cut-off
value=100%; 95% CI=[64.57%,100.0%]; Specificity at cut-
off value=80%, 95% CI=[37.55%, 98.97%]; Li kelihood Ra-
tio (LR)=5.00.
ACKNOWLEDGEMENTS
The authors are indeb te d to Prof. G. Saggio for pro-
viding us with the Movit System.
REFERENCES
Bła˙zkiewicz, M., Wiszomirska, I., and Wit , A. (2014).
Comparison of four methods of calculating the sym-
metry of spatial-temporal parameters of gait. A ct a of
Bioengineering and Biomechanics, 16(8):29–35.
Cavagna, G. and Margaria, R. (1966). Mechanics of walk-
ing. Journal of applied physiology, 21(1):271–278.
Costantini, G., Casali, D., Paolizzo, F., Alessandrini, M.,
Micarelli, A., Viziano, A., and Saggio, G. (2018). To-
Figure 7: (a) mean ± SEM of the average Y
φ
[s1] values
computed for BPPV patients (before and after the treat-
ment) and healthy controls subjects (HCS): n = 7 (BPPV
patients), n = 5 (HCS). p-values are calculated using the
Mann-Whitney U test, ∗ : p ∈ (0.01,0.05), ns: not sig-
nificant. b) ROC curve related to Y
φ
[s1] for the eval-
uation of the index as a diagnostic test. AUC=0.8000;
95% confidence interval AUC=[0.5244, 1.0000]; p-value
AUC=0.0882; cut-off value ROC=0.5577; Sensitivity at
cut-off value=71.43%; 95% CI=[35.89%,94.92%]; Speci-
ficity at cut-off value=80.00%; 95% CI=[37.55%,98.97%];
Likelihood Ratio (LR)=3.571.
wards the enhancement of body standing balance re-
covery by means of a wireless audio-biofeedback sys-
tem. Medical engineering & physics, 54:74–81.
Dugan, S. and Bhat, K. (2005). Bi omechanics and analysis
of running gait. Physical Medicine and Rehabilitation
Clinics, 16(3):603–621.
El Arayshi, M., Verrelli, C., Saggio, G., Iosa, M., Gentile,
A., Chessa, L., R uggieri, M., and Polizzi, A. (2022).
Performance index for in home assessment of motion
abilities in ataxia telangiectasia: A pilot study. Ap-
plied Sciences, 12(8):4093.
Iosa, M., De Bartolo, D., Morone, G., Boffi, T., Mammu-
cari, E., Vannozzi, G., Bini, F., Marinozzi, F., An-
tonucci, G., and Paolucci, S. (2019). Gait phase pro-
portions in different locomotion tasks: The pivot role
of golden ratio. Neuroscience Letters, 699:127–133.
Iosa, M., Fusco, A., Marchetti, F., Morone, G., Caltagirone,
C., Paolucci, S., and Peppe, A. (2013). The golden
ratio of gait harmony: R epetitive proportions of repet-
itive gait phases. BioMed research international,
2013.
Comprehensive Φ-Bonacci Index for Walking Ability Assessment in Paroxysmal Positional Vertigo: Role of Rehabilitation
209
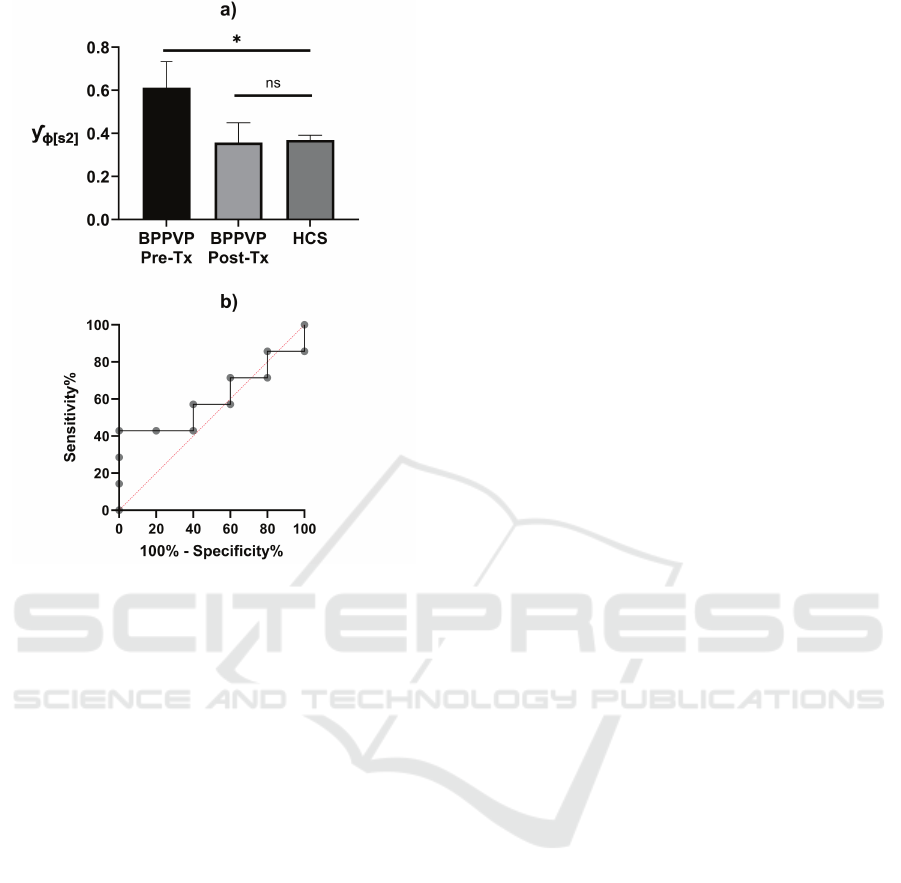
Figure 8: (a) mean ± SEM of the average Y
φ
[s2] val-
ues computed for BPPV patients (before and after the
treatment) and healthy controls subjects (HC S): n =
7 (BPPV patients), n = 5 (HCS). p-values are calcu-
lated using t he Mann-Whitney U test, ∗ : p ∈ (0.01,0.05),
ns: not significant. b) ROC curve related to Y
φ
[s2]
for the evaluation of the index as a diagnostic test.
AUC=0.5492; 95% confidence interval AUC=0.6000;
95% confidence interval AUC=[0.2686, 0.9314]; p-value
AUC=0.5698; cut-off value ROC=0.5577; Sensitivity at
cut-off value=42.86%; 95% CI=[15.82%,74.95%]; Speci-
ficity at cut-off value=80.00%; 95%CI=[37.55%,98.97%];
Likelihood Ratio (LR)=2.143.
Iosa, M., Morone, G., Fusco, A., Marchetti, F., Caltagirone,
C., Paolucci, S., and Peppe, A. (2016). Loss of fractal
gait harmony in parkinson’s disease. Clinical Neuro-
physiology, 127(2):1540–1546.
Jonsdottir, J., Lencioni, T., Gervasoni, E., Crippa, A., Anas-
tasi, D., Carpinella, I., Rovaris, M., Cattaneo, D., and
Ferrarin, M. (2020). Improved gait of persons with
multiple sclerosis after rehabilitation: effects on lower
limb muscle synergies, push-off, and toe-clearance.
Frontiers in Neurology, 11:668.
Leone, C., Kalron, A., Smedal, T., Normann, B., Wens, I.,
Eijnde, B., and Feys, P. (2018). Effects of rehabilita-
tion on gait pattern at usual and fast speeds depend on
walking impairment level in multiple sclerosis. Inter-
national Journal of MS Care, 20(5):199–209.
Marino, R., Verrelli, C., and Gnucci, M. (2020). Syn-
chronicity rectangle for temporal gait analysis: Ap-
plication to parkinson’s disease. JBiomedical Signal
Processing and Control, 62.
Novacheck, T. (1998). The biomechanics of running. Gait
and Posture, 7:77–95.
Ricci, M., Di Lazzaro, G., Pisani, A., Mercuri, N., Gian-
nini, F., and Saggio, G. (2019a). Assessment of motor
impairments in early untreated parkinson’s disease pa-
tients: the wearable electronics impact. I EEE journal
of biomedical and health informatics, 24(1):120–130.
Ricci, M., Terribili, M., Giannini, F., Errico, V., Pallotti,
A., Galasso, C., Tomasello, L., Sias, S., and S aggio,
G. (2019b). Wearable-based electronics to objectively
support diagnosis of motor impairments in school-
aged children. Journal of biomechanics, 83:243–252.
Verrelli, C., Iosa, M., Roselli, P., Pisani, A., Giannini,
F., and Saggio, G. (2021). Generalized fi nit e-length
fibonacci sequences in healthy and pathological hu-
man walking: Comprehensively assessing recursiv-
ity, asymmetry, consistency, self-similarity, and vari-
ability of gaits. Frontiers in Human Neuroscience,
15:649533.
Zhang, Y., Wang, H., Yao, Y., Liu, J., Sun, X., and Gu,
D. ( 2021). Walking stability in patients with be-
nign paroxysmal positional vertigo: An objective as-
sessment using wearable accelerometers and machine
learning. Journal of neuroengineering and rehabili-
tation, 18:1–9.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
210
