
A Low-Cost Printed Circuit Board Design for External Force Measuring
in Robotic Applications
H. Meneses
a
, V. Jarquin,
b
, Y. Miranda
c
, C. Cordero
d
,
N. Delgado
e
, K. Vargas
f
and F. Ru
´
ız
g
Instituto de Investigaciones en Ingenier
´
ıa, Facultad de Ingenier
´
ıa,
Universidad de Costa Rica, 11501-2060, San Jos
´
e, Costa Rica
{helber.meneses, valeria.jarquin, yehohnathan.miranda, carlos.corderoretana,
Keywords:
Force Sensing, Impedance Control, Printed Circuit Board, Strain Gauge, Wheatstone Bridge.
Abstract:
This paper presents a low-cost printed circuit board designed to measure external forces in several robotics
applications. Its operating principle is based on capturing electrical resistance change coming from strain
gauges attached to deformable beams in elastic force-torque sensors. This system offers great flexibility
because users can adjust up to 8 Wheatstone bridge circuit in different configurations depending on their
needs, their parameters as offset and amplification gain can easily be configured and the assembly process is
intended to be fast using a pick-and-place machine and a soldering oven.
1 INTRODUCTION
In the last decade the interest to bring out robots or
autonomous systems form factories has risen due to
their capacity to develop repetitive tasks (Prabakaran
et al., 2018), to execute dangerous jobs made in haz-
ardous environments (Wong et al., 2018) or to support
elderly people in daily activities (Oda et al., 2010).
The main limitations to achieve this goal are based
on their economic cost and their capacities to be
safe for the objects and people in the environment
(Kim et al., 2016). Some works have dealt with
the last issue incorporating force control approaches
as the well known impedance or admittance con-
trol (Calanca et al., 2016) based on force-torque sen-
sors located in particular robot joints (Dietrich et al.,
2016; Kim et al., 2016; Kim et al., 2014; Bussmann
et al., 2018; Iskandar et al., 2019; Sentis et al., 2013;
Nozawa et al., 2011), wrapping the robot in a kind
of skin made up of a large number of pressure sen-
sors (Armleder et al., 2022; Cheng et al., 2019; Dean
et al., 2019; Mittendorfer, 2012) or attaching a 6 de-
a
https://orcid.org/0000-0001-7119-3100
b
https://orcid.org/0009-0007-2339-3678
c
https://orcid.org/0009-0001-5842-0097
d
https://orcid.org/0009-0007-9435-7922
e
https://orcid.org/0009-0006-4099-8671
f
https://orcid.org/0009-0009-1958-7554
g
https://orcid.org/0000-0001-8563-4341
gree of freedom (DoF) force-torque sensor to a rigid
robot shell in one point (Kollmitz et al., 2018) or to a
rigid body part (Fr
´
emy et al., 2014; Oda et al., 2010;
Aguirre-Ollinger and Yu, 2021).
In literature, one of the preferred technologies to
build force-torque sensors is based on strain gauges
that capture the mechanical deformation of elastic
material. For instance, the works presented by (Chen
et al., 2015; Yuan et al., 2015; Valizadeh et al., 2015;
Lin et al., 2019; Sun et al., 2013; Phan et al., 2018;
Kebede et al., 2019) analysed the design and im-
plementation of force-torque sensor with up to eight
Wheatstone bridge in quarter, half, full bridge config-
urations or a mix of them.
The main reasons to employ this piezo-resistive
sensor has attractive qualities, namely, high measure-
ment accuracy and it is suitable for static or quasi-
static measurements (Chen et al., 2015), and temper-
ature compensation is possibly achieved using Wheat-
stone bridge circuits (Templeman et al., 2020).
Until now, it is of our knowledge in literature, that
there is not a complete low-cost printer circuit board
design that shows the whole configuration to sense
external forces due to mechanical strain changes in
elastic bodies, an therefore we proposed a whole de-
scription of each stage and the components required
to guarantee an optimal performance and flexibility
to select different Wheatstone bridge circuit configu-
rations depending on the user requirements.
Meneses, H., Jarquin, V., Miranda, Y., Cordero, C., Delgado, N., Vargas, K. and Ruíz, F.
A Low-Cost Printed Circuit Board Design for External Force Measuring in Robotic Applications.
DOI: 10.5220/0012238800003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 211-218
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
211

The paper is organized as follows: Section 2
presents the functionalities of the printed circuit
board, Section 3 shows the printed circuit board de-
sign, Section 4 shows the economic cost, Section 5
presents a comparison with some commercial acqui-
sition boards and finally, Section 6 presents the main
results of the printed circuit board design.
2 SYSTEM CONFIGURATION
The printed circuit board (PCB) is composed by four
main blocks as can be seen in Fig. 1. The power
supply circuits responsible to transfer required energy
to achieve the different functionalities and configura-
tions, the Wheatstone bridge circuits used to capture
the resistance change due to the mechanical defor-
mation on the elastic parts, the amplification system
in charge of amplifying voltage signal coming from
Wheatstone bridge in order to have a suitable reading
in the analog to digital converters and the microcon-
troller responsible for signals processing to estimate
external force values.
Power
Supply
System
Wheatstone
Bridge
Circuits
Amplification
System
Micro-
controller
Figure 1: Printed circuit board system configuration.
2.1 Power Supply System
The power supply system is composed by three
stages. The first one shown in Fig. 2 is responsible for
capturing the energy from a 12 V battery or a similar
system and it has an inverse polarity protection based
on a P-Channel MOSFET to avoid a damage in the
rest of the system due to a wrong user connection. A
similar protection circuit is recommended by (Scrim-
izzi et al., 2016) because other solutions based on a
diode entails higher power losses and a circuit protec-
tion based on a N-Channel MOSFET requires an ad-
ditional driver circuit composed by a charge pump cir-
cuit and EMI filter. As it is mentioned by (ONSEMI,
2023), when a reverse polarity protection based on a
P-Channel MOSFET is used, to turn on a P-Channel,
the gate voltage needs to be lower than the source
voltage by at least the threshold voltage specified by
the manufacturer and this requirement is fulfilled with
a right connection using the circuit shown in Fig. 2,
but when the battery is reversely connected, the gate
and source voltage are practically the same and there-
fore, the P-channel is turn off. Note, that there is a
solder bridge jumper in parallel with a MOSFET tran-
sistor if the user decides to do not use that protections
for any reason. Also, it can be seen several capacitors
that deal with battery voltage changes and provide a
low impedance path to high frequency noise coming
from the battery voltage.
1.5 A
C1
Q1
F2
J1
C2
SJ12P
JP1
+12V
PWR_Conn
G
S
D
Figure 2: Main power system.
The second one is connected to the previous stage
and it can be seen in Fig. 3. It is composed by a 9
V voltage regulator that supplies a 9 V constant volt-
age to the Wheatstone bridge in order to have a higher
voltage due to the electrical resistance change in com-
parison to the obtained when the Wheatstone bridge is
power to typical voltages values as 5 V or 3.3 V. Note,
that it is also possible to use 12 V coming from the
battery to power the Wheatstone bridge closing the
solder bridge jumper located parallel to the 9 V volt-
age regulator. Moreover, in the output of the voltage
regulator there is a diode to protect it in case of cur-
rent coming from inverse direction. Also, the capac-
itors in this stage perform similar functions to those
mentioned above: regulate voltage changes and filter
high frequency noise. This stage also provides the re-
quired voltage level by the operational amplifier that
will be shown further.
Vin
Vout
GND
JP2
12V_reg_by
C3
C4
C5
U7
C6
9V_EN
D29
+12V
+12V
Figure 3: 9 V voltage regulator system.
The last stage of the power system is shown in
Fig. 4. It is composed mainly by a 5 V voltage regu-
lator whose power supply can come from 9 V voltage
regulator or from 12 V battery. The output voltage
of this regulator is employed to power the microcon-
troller STM32F407 Discovery as well as a 1.6 V ref-
erence voltage chip used by the amplification voltage
system. The capacitors shown in this stage also exe-
cute the same functions of the capacitors mentioned
above.
2.2 Wheatstone Bridge Circuits
The PCB has eight Wheatstone bridge circuits that
can be implemented as quarter, half or full bridge con-
figuration as it can be seen in Fig. 5 selecting prop-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
212

+9V
Vin
Vout
GND
C7
C8
C9
C10
5V_EN
D1
U2
+12V
+5V
9vregto5V
JP4
Figure 4: 5 V voltage regulator system.
erly the solder bridge jumpers JP1, JP2, JP3, JP4,
JPV1, JPV2, JPV3 and JPV4. Note that RV1, RV2,
RV3, and RV4 are 50 Ω trimmers that are in series
with either a strain gauge of typical values of 120 Ω
or 350 Ω (Gauge 1, Gauge 2, Gauge 3 or Gauge 4)
or with a 100 Ω or 330 Ω resistor (R1, R2, R3 or R4)
and they allow to adjust an equal resistance on each
Wheatstone bridge arm in order to have a null voltage
generation when no force is applied.
+5 V
1
2
1
2
Gauge 1
Gauge 2
RV1
JP1
JPV1
R1
RV2
JP2
JPV2
R2
RV3
JP3
JPV3
R3
RV4
JP4
JPV4
R4
1
2
Gauge 4
1
2
Gauge 3
V+
JP5
+9 V
JP6
V-
Figure 5: Wheatstone bridge.
The output voltage V
d
coming from the Wheat-
stone bridge circuit is given by:
V
d
= V + −V − = V cc ·
R
2G
R
1G
+ R
2G
−
R
3G
R
4G
+ R
3G
(1)
where R
iG
is the i-th strain gauge resistance (i = 1,2
on the right Wheatstone bridge arm and i = 3,4 on the
left Wheatstone bridge arm) and V
cc
could be either 9
V or 5 V as it is shown in Fig. 5. If R
2G
= R
4G
= R
T
and R
1G
= R
3G
= R
C
, then:
V
d
= V
+
−V
−
= V cc ·
R
T
− R
C
R
T
+ R
C
(2)
Note that V
o
> 0 if R
T
> R
C
and this happen when
both strain gauges 2 and 4 or any of them operate
in tension (resulting in increased resistance) and both
strain gauges 1 and 3 or any of them operate in com-
pression (resulting in decreased resistance). When the
R6
R7
V
o
R5
+5 V
JP7
+9 V
JP8
RV6
RV5
IN
GND
OUT
V-
V+
C12
C13
C11
+3.3V
JP7
D1
+1.6V
Reference
+5 V
Figure 6: Voltage amplification system.
mechanical deformation happens in the inverse direc-
tion the voltage output is V
o
< 0 and therefore, it is
possible to have positive and negative voltage values
according to the direction of the external force applied
on the force-torque sensor.
2.3 Voltage Amplification System
In order to have a better reading of the voltage signals
coming from the Wheatstone bridge circuits, an oper-
ational amplifier with instrumentation characteristics
was chosen as it can be seen in Fig. 6. For this PCB
the TLV9154QDRQ1 was chosen. Among its main
features, there is a typical bandwidth of 4.5 MHz, a
slew rate of 21 V/ µs and a common-mode rejection
ratio of 125 dB.
At it is shown in this figure, a 1.6 V voltage reference
chip is required to get a voltage offset different from
zero (1.6 V) as output of the amplification system.
Therefore, the voltage output V
o
is given by:
V
o
=
R5
RV 5
1 +
R6
RV 6
1 +
R5
RV 5
V
+
−
R6
RV 6
V
−
+
1 +
R6
RV 6
1 +
R5
RV 5
1.6
(3)
Note that trimmers RV 5 and RV 6 are adjusted in
such way that relation (4) is accomplished:
R6
RV 6
=
R5
RV 5
(4)
Therefore, the voltage output can be expressed as:
V
o
=
R6
RV 6
(V
+
−V
−
) + 1.6 (5)
where the term
R6
RV 6
represents the amplification gain.
3 PRINTED CIRCUIT BOARD
DESIGN
The printed circuit board was designed using KiCad
7.0 which is an open source software developed for
A Low-Cost Printed Circuit Board Design for External Force Measuring in Robotic Applications
213
electronics circuits design. It offers an schematic cap-
ture where electrical diagram is created as well as a
PCB layout where the location of the different com-
ponents is made and important characteristics as track
width, via size, clearance, power and ground planes,
and PCB layer stackup are defined.
3.1 PCB Layer Stackup
The general purpose of this printed circuit board is
sending all the voltage signals to the analog to digital
converts in an accurate and quickly way. A good prac-
tice to do that is through the use of impedance control
which avoids distortion, attenuation and reflection of
the signals and improves the reliability of the mea-
surements that are performed within the PCB (Zhang
et al., 2011).
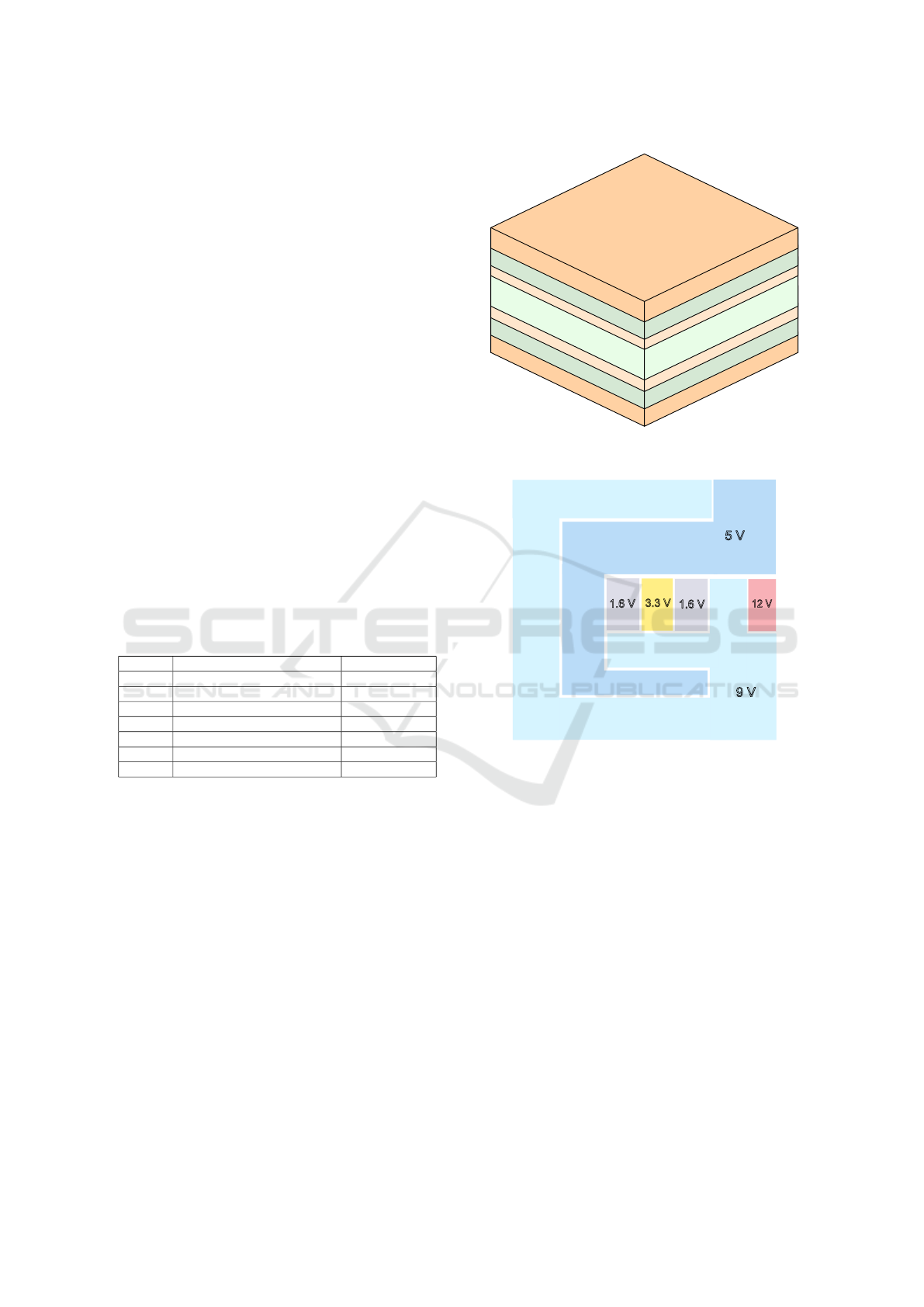
For this design, the standard JLC04161H-7628
(https://jlcpcb.com/impedance) shown in Tab. 1 was
chosen as an option for impedance control because
it is a standard used for high data transmission ap-
plications (Circuits, 2020), as this case. This four
layer configuration was also chosen because it allows
connections between all the electrical components de-
spite their large number.
Table 1: Dielectric Specifications LC04161H-7628
(https://jlcpcb.com/impedance).
Layer Material Tickness (mm)
L1 Outer Copper Weight, 1 oz A 0.0350
Prepreg 7628, RC 49%, 8.6 mil A 0.2104
L2 Inner Copper Weight A 0.0152
Core 1.1mm H/HOZ with copper A 1.0650
L3 Inner Copper Weight 0.0152
Prepreg 7628, RC 49%, 8.6 mil A 0.2104
L4 Outer Copper Weight, 1 oz 0.0350
A visual distribution of the layer stackup is shown
in Fig. 7. In our case, L1 layer corresponds to the
front copper layer where most of surface mounting
device (SMD) components are positioned in order to
facilitate the assembly process using a pick-and-place
machine (P&P) and a soldering oven as it can be seen
in Fig. 9. All the trimmers were selected as through-
hole technology because they are cheaper than other
technologies and they were mounted on this layer
to facilitate their resistance adjustment. The strain
gauge connectors are also mounting on this layer. L2
layer represents the ground plane, L3 layer the power
planes which has the distributions of the different
voltage level required by the PCB as it can be seen
in Fig. 8. Layer L4 corresponds to the back copper
layer which has the power connector, voltage regula-
tors and few smd components as capacitors as it can
be seen in Fig. 10.
L1
Prepreg
L2
Core
L3
Prepreg
L4
Figure 7: The JLC04161H-7628 (Standard) stackup offered
by JLCPCB implemented in the PCB design.
1.6 V
5 V
3.3 V
12 V
9 V
1.6 V
Figure 8: Power Plane Distribution.
3.2 Net Classes Configuration
In Kicad it is possible to define a set of nets that have
the same parameters to route these nets and this is
called as Net Classes. This is very useful to define
the most important parameters for proper implemen-
tation of PCB traces. The parameters of these classes
were defined as follows:
• Clearance: minimum values are used with an ad-
ditional 30 % margin to provide a suitable mar-
gin, following the electrical spacing specified by
the IPC 2221 standard (The Institute for Intercon-
necting and Packaging Electronic Circuits, 1998).
Please note that these values are intended for un-
coated external components (A6).
• Track Width: it was calculated by using the for-
mula (6) specified in the IPC 2221 standard con-
sidering a temperature change of 10 degrees Cel-
sius and the estimated current values shown in
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
214
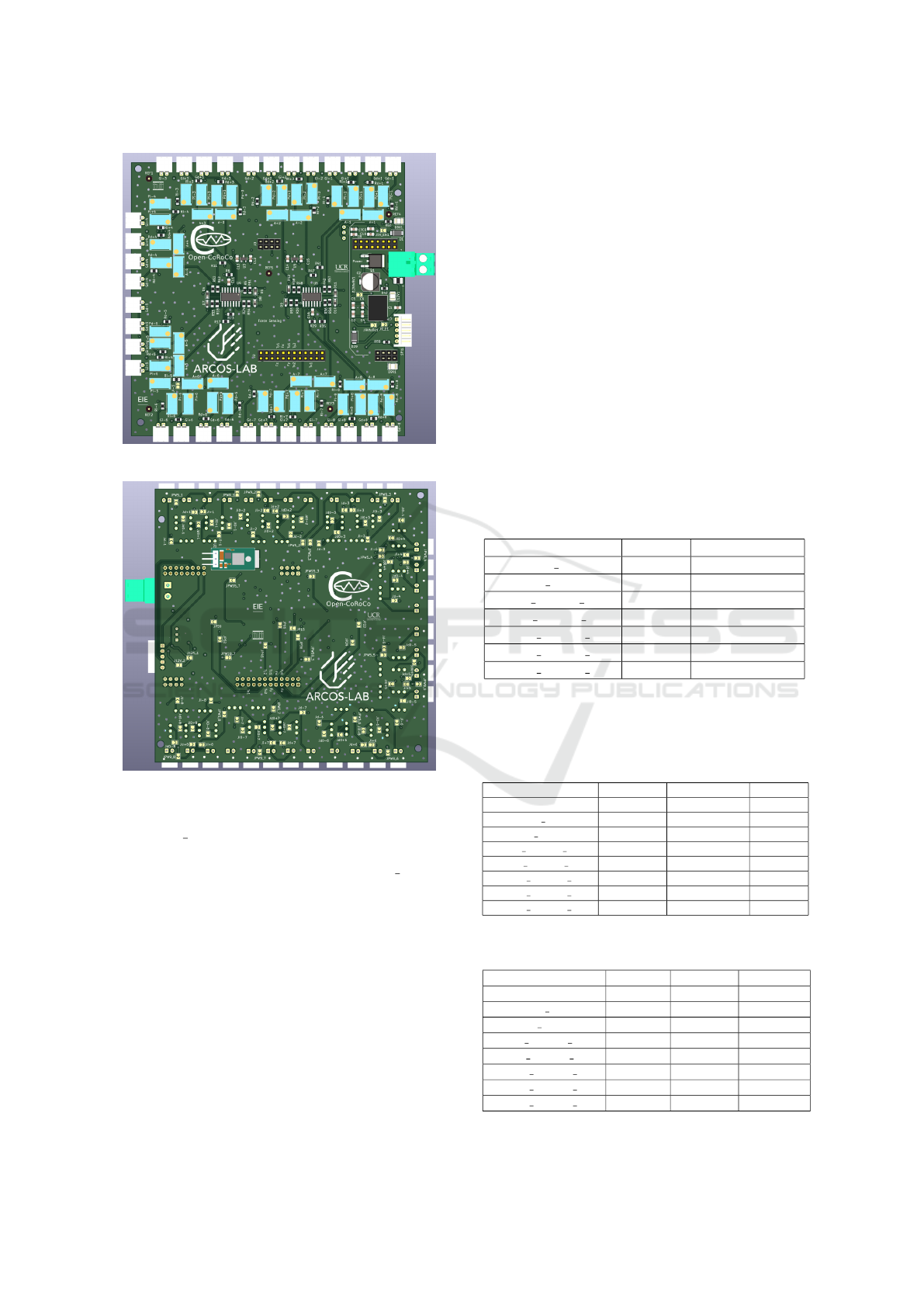
Figure 9: Components distribution on frontal layer.
Figure 10: Components distribution on back layer.
Tab. 2 for the defined Net Classes. Note that
Analog Signal refers mainly to the current signals
crossing the Wheatstone bridge circuits and the
amplification voltage system, the GND Analog
refers to the current crossing the ground plane and
the rest of Net Classes refer to the circulating cur-
rent in a stage with an specific voltage level. The
remaining variables for track width calculation
were set according to the specifications outlined in
the IPC 2221 standard (The Institute for Intercon-
necting and Packaging Electronic Circuits, 1998).
I = K · ∆T
0.44
· (W · H)
0.725
(6)
• Via Hole: typically, it has the same value as the
track width because the width of the track should
always have a Via Hole of at least the same size to
accommodate the track. A minimum value of 0.3
mm was set to minimize economic cost, consid-
ering the purchase options available by JLCPCB
manufacturer. A large Via Hole size improves
heat dissipation (Singh et al., 2019).
• Via Size: it is advisable to use a value twice the
size of the Via Hole. For example, if a Via Hole of
0.3 mm is used, a Via Size of 0.6 mm ensures an
annular ring of 0.15 mm (JLCPCB, 2023). This
helps to minimize costs, considering the options
available at JLCPCB manufacturer for instance.
• uVia Size: microvias that connect inner layers
with outer layers maintain the same value as their
corresponding Via Size. This is done to reduce
costs.
• uVia Hole: microvias that connect inner layers
with outer layers maintain the same value as their
corresponding Via Hole. This is done to reduce
economic cost.
Table 2: Current calculations for different Net Classes on
the PCB.
Net Class Current Current + 30%
Analog Signal 0.160 A 0.208 A
GND Analog 1.673 A 2.391 A
Power Analog 1.6V 0.012 A 0.0156 A
Power Analog 12V 1.10 A 1.57 A
Power Analog 3V 0.263 A 0.342 A
Power Analog 5V 0.693 A 0.990 A
Power Analog 9V 1.10 A 1.57 A
Consequently. the Net classes parameters defined
in KiCad are shown in Tab. 3 and 4.
Table 3: NetClasses parameters used in PCB design accord-
ing to the track requirements.
Net Class Clearance Track Width Via Size
Default 0.16 mm 0.16 mm 0.6 mm
Analog Signal 0.16 mm 0.16 mm 0.6 mm
GND Analog 0.4 mm 1 mm 2 mm
Power Analog 1.6V 0.16 mm 0.16 mm 0.6 mm
Power Analog 12V 0.25 mm 0.56 mm 1.12 mm
Power Analog 3V 0.16 mm 0.16 mm 0.6 mm
Power Analog 5V 0.16 mm 0.3 mm 0.6 mm
Power Analog 9V 0.25 mm 0.56 mm 1.12 mm
Table 4: NetClasses parameters used in PCB design accord-
ing to the track requirements.
Net Class Via Hole uVia Size uVia Hole
Default 0.3 mm 0.6 mm 0.3 mm
Analog Signal 0.3 mm 0.6 mm 0.3 mm
GND Analog 1 mm 2 mm 1 mm
Power Analog 1.6V 0.3 mm 0.6 mm 0.3 mm
Power Analog 12V 0.56 mm 1.12 mm 0.56 mm
Power Analog 3V 0.3 mm 0.6 mm 0.3 mm
Power Analog 5V 0.3 mm 0.6 mm 0.3 mm
Power Analog 9V 0.56 mm 1.12 mm 0.56 mm
A Low-Cost Printed Circuit Board Design for External Force Measuring in Robotic Applications
215
4 PCB ECONOMIC COST
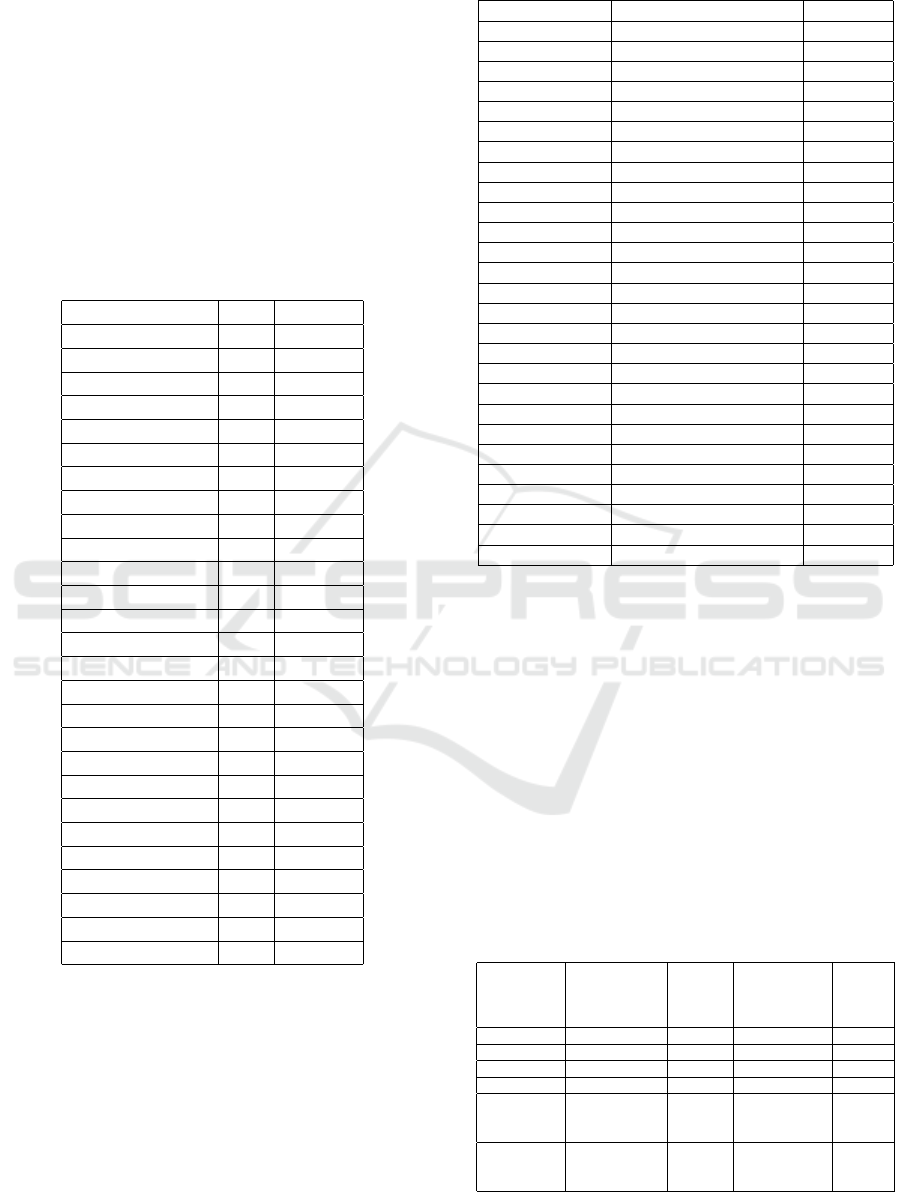
The list of components used for the PCB design is
shown in Tab. 5 and 6. It contains the part num-
ber of each component, its price, the type of assem-
bly: through-hole (T-H) or SMD as well as the re-
quired quantity. The total estimated cost including the
STM32F407 Discovery microcontroller was $62.75.
The acronyms used in this list are: Op Amps for op-
erational amplifiers, G for gauge, P for power, R for
resistor, T for trimmer, C for capacitor and V for volt-
age.
Table 5: List of components for the printed circuit board.
Component Qty Price
Op Amps 2 $3.300
G Connector 32 $4.096
P Connector 1 $0.129
R 100kΩ 16 $0.019
R 2kΩ 1 $0.001
R 1kΩ 9 $0.009
R 680Ω 1 $0.001
R 330Ω 40 $0.048
R 100Ω 32 $0.038
T 50Ω 32 $3.936
T 1kΩ 16 $1.024
C 0.16uF 10 $7.520
C 0.47uF 1 $0.026
C 100uF 1 $0.073
C 2.2uF 2 $0.016
C 10uF 2 $0.015
V. References 2 $6.580
MOSFET 40V 1 $0.546
Fuse 2A 1 $0.099
Regulator 9V 1 $3.350
Regulator 5V 1 $3.370
Rectifier diode 2 $3.370
LED 3 $0.014
STM32F407 1 $21.170
Schottky Diodes 8 $0.640
PCB Fabrication 1 $6.440
Header 4 $0.268
5 COMPARISON WITH
COMMERCIAL DATA
ACQUISITION SYSTEMS
In order to prove the effectiveness of the printed cir-
cuit board, several data acquisition boards composed
by Wheatstone bridge circuits were analysed. The
outstanding features are shown in Tab. 7. As it can
Table 6: List of components for the printed circuit board.
Component Part number Assembly
Op Amps TLV9154QDRQ1 SMD
G Connector JST XH-2 T-H
P Connector Terminal Block 2 pin T-H
R 100kΩ WCR0805-100KFI SMD
R 2kΩ ERJ-6ENF2001V SMD
R 1kΩ ERJ-3EKF1001V SMD
R 680Ω ERJ-6ENF6200V SMD
R 330Ω ASC0805-330RFT5 SMD
R 100Ω PCF0805R-100RBT1 SMD
T 50Ω 3224W T-H
T 1kΩ 3224W T-H
C 0.16uF C0805C104Z4VACTU SMD
C 0.47uF 885012207049 SMD
C 100uF 865080343009 SMD
C 2.2uF 885012107012 SMD
C 10uF C2012JB1C106M085AC SMD
V. References MAX6018BEUR16+T SMD
MOSFET 40V DMP4047SK3-13 SMD
Fuse 2A C1Q 2 SMD
Regulator 9V R-78K9.0-1.0 T-H
Regulator 5V mEZD71201A-G T-H
Rectifier diode FM4004W-W SMD
LED 156120RS75300 SMD
STM32F407 STM32F407G-DISC1 T-H
Schottky Diodes RB751S40T5G SMD
PCB Fabrication 4 layers -
Header Connector T-H
be seen only two of them allow quarter, half or full
bridge configurations which is a relevant characteris-
tic depending of the force-torque sensor available to
the user and using our PCB design we can reach any
of these configurations. Moreover, only one has up to
16 Wheatstone bridge circuits, but its price is around
ten times more expensive than our design. In relation
with the amount of samples measured by second, four
data acquisition boards reach up to 14400 but in our
case we considered the STM32F407 Discovery which
has analog to digital converters that can work in order
of MHz (ST, 2022).
Table 7: Characteristics of Commercial Data Acquisition
Boards (Windmill Software, 2015), (DATAQ Instruments,
2019),(DATAQ Instruments, 2014), (DATAQ Instruments,
2018), (Data Translation, 2017).
Data
Acquisition
Board
Bridge
Type
Strain
Gage
Input
Modules
ADC (samples
/second
per channel)
Price
DI-718Bx-S Full bridge 6 14400 $1495
DI-4718B-U Full bridge 6 14400 $695
DI-4718B-E Full bridge 6 14400 $795
DI-718B-ES Full bridge 6 14400 $895
DT9829-8
Quarter-bridge,
Half-bridge,
Full-bridge
8 120 $2159
751-SG
Quarter-bridge,
Half-bridge,
Full-bridge
16 48 $739.22
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
216

6 CONCLUSIONS
This paper proposed a low-cost printed circuit board
which can be easily reconfigurable to work with dif-
ferent force-torque sensors based on strain gauges.
Moreover it has an impedance control layer stackup
to allow fast and reliable data transmission and other
methods as ground stitching are employed to reduce
electromagnetic interference. Besides, the compo-
nents distributions were made in order to carry out
a fast assembly process of SMD components using
a pick-and-place machine and a solder oven. It is
intended that this design can be useful to the user
that requires a low cost system to measure forces in
robotics applications.
ACKNOWLEDGEMENTS
This work has been supported by the Instituto de In-
vestigaciones en Ingenier
´
ıa as well as the School of
Electrical Engineering from the University of Costa
Rica.
REFERENCES
Aguirre-Ollinger, G. and Yu, H. (2021). Omnidirectional
platforms for gait training: Admittance-shaping con-
trol for enhanced mobility. Journal of Intelligent &
Robotic Systems, 101(3):52.
Armleder, S., Dean-Leon, E., Bergner, F., and Cheng, G.
(2022). Interactive force control based on multimodal
robot skin for physical human-robot collaboration.
Advanced Intelligent Systems, 4(2):2100047.
Bussmann, K., Dietrich, A., and Ott, C. (2018). Whole-
body impedance control for a planetary rover with
robotic arm: Theory, control design, and experimental
validation. In 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 910–917.
Calanca, A., Muradore, R., and Fiorini, P. (2016). A re-
view of algorithms for compliant control of stiff and
fixed-compliance robots. IEEE/ASME Transactions
on Mechatronics, 21(2):613–624.
Chen, D., Song, A., and Li, A. (2015). Design and cal-
ibration of a six-axis force/torque sensor with large
measurement range used for the space manipulator.
Procedia Engineering, 99:1164–1170. 2014 Asia-
Pacific International Symposium on Aerospace Tech-
nology, APISAT2014 September 24-26, 2014 Shang-
hai, China.
Cheng, G., Dean-Leon, E., Bergner, F., Rogelio Guadar-
rama Olvera, J., Leboutet, Q., and Mittendorfer, P.
(2019). A comprehensive realization of robot skin:
Sensors, sensing, control, and applications. Proceed-
ings of the IEEE, 107(10):2034–2051.
Circuits, S. (2020). High-speed pcb design guide. pages
30-32.
Data Translation (2017). Dt9828 usb multi-sensor measure-
ment module. Datasheet. https://www.mccdaq.com/
PDFs/specs/DT9829-Datasheet.pdf.
DATAQ Instruments (2014). Di-718b 8b module data
logger system. Datasheet. https://www.dataq.com/
resources/pdfs/datasheets/di718b ds.pdf.
DATAQ Instruments (2018). Di-718bx 8b module data
logger. Datasheet. https://www.dataq.com/resources/
pdfs/datasheets/di718bx ds.pdf.
DATAQ Instruments (2019). Di-4718b usb or eth-
ernet data acquisition (daq) system. Datasheet.
https://www.dataq.com/resources/pdfs/datasheets/di-
4718b-data-logger-ds.pdf .
Dean, E., Ramirez-Amaro, K., Bergner, F., and Cheng, G.
(2019). Robot skin: Fully-compliant control frame-
work using multi-modal tactile events. P
¨
ADI Bolet
´
ın
Cient
´
ıfico de Ciencias B
´
asicas e Ingenier
´
ıas del ICBI,
7(Especial 1).
Dietrich, A., Bussmann, K., Petit, F., Kotyczka, P., Ott, C.,
Lohmann, B., and Albu-Sch
¨
affer, A. (2016). Whole-
body impedance control of wheeled mobile manipula-
tors. Autonomous Robots, 40(3):505–517.
Fr
´
emy, J., Ferland, F., Lauria, M., and Michaud, F. (2014).
Force-guidance of a compliant omnidirectional non-
holonomic platform. Robotics and Autonomous Sys-
tems, 62(4):579–590.
Iskandar, M., Quere, G., Hagengruber, A., Dietrich, A., and
Vogel, J. (2019). Employing whole-body control in
assistive robotics. In 2019 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 5643–5650.
JLCPCB (2023). Pcb manufacturing & assembly capabil-
ities. https://jlcpcb.com/capabilities/pcb-capabilities.
Last update on July 24, 2023.
Kebede, G. A., Ahmad, A. R., Lee, S.-C., and Lin, C.-
Y. (2019). Decoupled six-axis force–moment sensor
with a novel strain gauge arrangement and error re-
duction techniques. Sensors, 19(13).
Kim, K. S., Kwok, A. S., Thomas, G. C., and Sen-
tis, L. (2014). Fully omnidirectional compliance in
mobile robots via drive-torque sensor feedback. In
2014 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 4757–4763.
Kim, K. S., Llado, T., and Sentis, L. (2016). Full-body
collision detection and reaction with omnidirectional
mobile platforms: a step towards safe human-robot in-
teraction. Autonomous Robots, 40(2):325–341.
Kollmitz, M., B
¨
uscher, D., Schubert, T., and Burgard, W.
(2018). Whole-body sensory concept for compli-
ant mobile robots. In 2018 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
5429–5435.
Lin, C.-C., Su, C.-Y., Lin, S.-T., Chen, C.-Y., Yeh, C.-N.,
Lin, C.-H., Wang, L.-W., Kuo, S.-Y., and Chien, L.-J.
(2019). 6-dof force/torque sensor. In 2019 14th Inter-
national Microsystems, Packaging, Assembly and Cir-
cuits Technology Conference (IMPACT), pages 191–
194.
A Low-Cost Printed Circuit Board Design for External Force Measuring in Robotic Applications
217

Mittendorfer, P. a. G. (2012). 3d surface reconstruc-
tion for robotic body parts with artificial skins. In
2012 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 4505–4510.
Nozawa, S., Ishida, M., Ueda, R., Kakiuchi, Y., Okada, K.,
and Inaba, M. (2011). Full-body motion control inte-
grated with force error detection for wheelchair sup-
port. In 2011 11th IEEE-RAS International Confer-
ence on Humanoid Robots, pages 193–198.
Oda, M., Zhu, C., Suzuki, M., Luo, X., Watanabe, H.,
and Yan, Y. (2010). Admittance based control of
wheelchair typed omnidirectional robot for walking
support and power assistance. In 19th International
Symposium in Robot and Human Interactive Commu-
nication, pages 159–164.
ONSEMI (2023). MOSFET Selection for Re-
verse Polarity Protection AND90146/D.
https://www.onsemi.com/download/application-
notes/pdf/and90146-d.pdf. Rev. 1.
Phan, T.-P., Chao, P. C.-P., Cai, J.-J., Wang, Y.-J., Wang, S.-
C., and Wong, K. (2018). A novel 6-dof force/torque
sensor for cobots and its calibration method. In 2018
IEEE International Conference on Applied System In-
vention (ICASI), pages 1228–1231.
Prabakaran, V., Elara, M. R., Pathmakumar, T., and Nansai,
S. (2018). Floor cleaning robot with reconfigurable
mechanism. Automation in Construction, 91:155–
165.
Scrimizzi, F., Longo, G., and Gambino, G. (2016).
Automotive-grade p-channel power mosfets for static,
dynamic and repetitive reverse polarity protection.
In PCIM Europe 2016; International Exhibition and
Conference for Power Electronics, Intelligent Motion,
Renewable Energy and Energy Management, pages 1–
5.
Sentis, L., Petersen, J., and Philippsen, R. (2013). Im-
plementation and stability analysis of prioritized
whole-body compliant controllers on a wheeled hu-
manoid robot in uneven terrains. Autonomous Robots,
35(4):301–319.
Singh, S., Singh, A., Singh, A., and Singh, S. (2019). Study
on pcb designing problems and their solutions. In
2019 International Conference on Power Electronics,
Control and Automation (ICPECA), page 4.
ST (2022). An2834 application note how to get the best adc
accuracy in stm32 microcontrollers.
Sun, Y., Liu, Y., Jin, M., and Liu, H. (2013). Design and op-
timization of a novel six-axis force/torque sensor with
good isotropy and high sensitivity. In 2013 IEEE In-
ternational Conference on Robotics and Biomimetics
(ROBIO), pages 631–638.
Templeman, J. O., Sheil, B. B., and Sun, T. (2020). Multi-
axis force sensors: A state-of-the-art review. Sensors
and Actuators A: Physical, 304:111772.
The Institute for Interconnecting and Packaging Electronic
Circuits (1998). Ipc-2221: Generic standard on
printed board design. pages 38,41-42.
Valizadeh, A., Akbarzadeh, A., and Heravi, M. H. T. (2015).
Effect of structural design parameters of a six-axis
force/torque sensor using full factorial design. In
2015 3rd RSI International Conference on Robotics
and Mechatronics (ICROM), pages 789–793.
Windmill Software (2015). 751-sg user manual. Datasheet.
https://www.windmill.co.uk/help/751sg.pdf.
Wong, C., Yang, E., Yan, X.-T., and Gu, D. (2018). Au-
tonomous robots for harsh environments: a holistic
overview of current solutions and ongoing challenges.
Systems Science & Control Engineering, 6(1):213–
219.
Yuan, C., Luo, L.-P., Yuan, Q., Wu, J., Yan, R.-J., Kim,
H., Shin, K.-S., and Han, C.-S. (2015). Development
and evaluation of a compact 6-axis force/moment sen-
sor with a serial structure for the humanoid robot foot.
Measurement, 70:110–122.
Zhang, M.-S., Mao, J.-F., and Long, Y.-L. (2011). Power
noise suppression using power-and-ground via pairs
in multilayered printed circuit boards. IEEE Transac-
tions on Components, Packaging and Manufacturing
Technology, 1(3):374–385.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
218
