
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
Thorsten Händler
a
Ferdinand Porsche Mobile University of Applied Sciences (FERNFH), Austria
Keywords:
Taxonomy, Autonomous Agents, Multi-Agent Collaboration, Large Language Models (LLMs), AI System
Classification, Alignment, Software Architecture, Architectural Viewpoints, Software-Design Rationale,
Context Interaction, Artificial Intelligence, Domain-Ontology Diagram, Feature Diagram, Radar Chart.
Abstract:
Large language models (LLMs) have revolutionized the field of artificial intelligence, endowing it with so-
phisticated language understanding and generation capabilities. However, when faced with more complex and
interconnected tasks that demand a profound and iterative thought process, LLMs reveal their inherent lim-
itations. Autonomous LLM-powered multi-agent systems represent a strategic response to these challenges.
While these architectures hold promising potential in amplifying AI capabilities, striking the right balance be-
tween different levels of autonomy and alignment remains the crucial challenge for their effective operation.
This paper proposes a comprehensive multi-dimensional taxonomy, engineered to analyze how autonomous
LLM-powered multi-agent systems balance the dynamic interplay between autonomy and alignment across
various aspects inherent to architectural viewpoints such as goal-driven task management, agent composition,
multi-agent collaboration, and context interaction. Our taxonomy aims to empower researchers, engineers,
and AI practitioners to systematically analyze the architectural dynamics and balancing strategies employed
by these increasingly prevalent AI systems. The exploratory taxonomic classification of selected representa-
tive LLM-powered multi-agent systems illustrates its practical utility and reveals potential for future research
and development. An extended version of this paper is available on arXiv (Händler, 2023).
1 INTRODUCTION
In recent years, the emergence and the technological
feasibility of large language models (LLMs) have rev-
olutionized the field of artificial intelligence (Brown
et al., 2020; Ouyang et al., 2022; Thoppilan et al.,
2022; Chowdhery et al., 2022; Zhang et al., 2022).
Pre-trained on vast amounts of text data, these models
have catalyzed significant advancements by enabling
sophisticated language understanding and generation
capabilities, opening doors to a broad range of appli-
cations (Bommasani et al., 2021; Bubeck et al., 2023;
Kaddour et al., 2023). Yet, despite their remarkable
capabilities, LLMs also have inherent limitations.
While LLMs excel at generating outputs based
on patterns identified in their training data, they lack
a genuine understanding of the real world. Conse-
quently, their outputs might seem plausible on the sur-
face, but can be factually incorrect or even halluci-
nated (Maynez et al., 2020; Ji et al., 2023). Moreover,
despite their proficiency in handling vast amounts of
textual information and their rapid processing and
a
https://orcid.org/0000-0002-0589-204X
pattern recognition capabilities, LLMs struggle with
maintaining consistent logic across extended chains
of reasoning. This deficiency hinders their ability to
engage in a deliberate, in-depth, and iterative thought
process (aka slow thinking) (Sloman, 1996; Kahne-
man, 2011; Fabiano et al., 2023; Lin et al., 2023). As
a result, LLMs encounter difficulties when it comes
to handling more complex and interconnected tasks
(Kojima et al., 2022; Wei et al., 2022).
These limitations of individual LLMs have led
to the exploration of more sophisticated and flexi-
ble AI architectures including multi-agent systems
that aim at accomplishing complex tasks, goals, or
problems with the cognitive synergy of multiple au-
tonomous LLM-powered agents (Torantulino et al.,
2023; Nakajima, 2023; TransformerOptimus et al.,
2023; Park et al., 2023; Shen et al., 2023; Li et al.,
2023; Shrestha et al., 2023; Hong et al., 2023). Such
systems tackle user-prompted goals by employing a
divide & conquer strategy, by breaking them down
into smaller manageable tasks. These tasks are then
assigned to specialized agents, each equipped with
a dedicated role and the reasoning capabilities of an
LLM, as well as further competencies by utilizing
Händler, T.
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures.
DOI: 10.5220/0012239100003598
In Proceedings of the 15th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2023) - Volume 3: KMIS, pages 85-98
ISBN: 978-989-758-671-2; ISSN: 2184-3228
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
85

contextual resources like data sets, tools, or further
foundation models. Taking a cue from Minsky’s so-
ciety of mind theory (Minsky, 1988), the key to the
systems’ problem-solving capability lies in orches-
trating the iterative collaboration and mutual feedback
between these more or less ’mindless’ agents during
task execution and result synthesis.
One of the central challenges for the effective
operation of LLM-powered multi-agent architectures
(as with many AI systems) lies in finding the opti-
mal balance between autonomy and alignment (Yud-
kowsky, 2016; Bostrom, 2017; Russell, 2022; Wolf
et al., 2023; Hong et al., 2023). On the one hand,
the systems should be aligned to the goals and in-
tentions of human users; on the other hand, the sys-
tems should accomplish the user-prompted goal in a
self-organizing manner. However, a system with high
autonomy may handle complex tasks efficiently, but
risks straying from its intended purpose if not suffi-
ciently aligned, resulting in unexpected consequences
and uncontrollable side effects. Conversely, a highly
aligned system may adhere closely to its intended pur-
pose but may lack the flexibility and initiative to re-
spond adequately to novel situations. Current systems
exhibit diverse approaches and mechanisms to inter-
twine these cross-cutting concerns (Kiczales et al.,
1997) throughout their architectural infrastructure and
dynamics.
However, existing taxonomies and analysis frame-
works for autonomous systems and multi-agent sys-
tems (see Section 2.1) fall short in providing means
to categorize and understand these challenges and
involved architectural complexities posed by LLM-
powered multi-agent systems.
This paper
1
aims to bridge this gap by introduc-
ing a systematic approach in terms of a comprehen-
sive multi-dimensional taxonomy. This taxonomy is
engineered to analyze and classify how autonomous
LLM-powered multi-agent systems balance the inter-
play between autonomy and alignment across their
system architectures.
A simplified overview of the dimensions and lev-
els applied in our taxonomy is represented by the
cuboid shown in Fig. 1. First, the synergy be-
tween autonomy and alignment manifests as a two-
dimensional matrix with multiple hierarchical lev-
els. This matrix captures a spectrum of nine dis-
tinct system configurations, ranging from systems
that strictly adhere to predefined mechanisms (rule-
driven automation, L0/L0) to those that dynamically
adapt in real-time, guided by evolving conditions and
user feedback (user-responsive autonomy, L2/L2).
1
An extended paper version (Händler, 2023) is avail-
able at https://doi.org/10.48550/arXiv.2310.03659.
Alignment
static / adaptive / self-organizing
integrated
Architectural
Viewpoints
Autonomy
L0
L0
L1
L1
L2
L2
user-
guided
real-time
responsive
goal-driven task management
agent composition
multi-agent collaboration
context interaction
Figure 1: A simplified representation of the proposed multi-
dimensional taxonomy for autonomous LLM-powered
multi-agent systems. The x-axis represents the level of au-
tonomy, the y-axis the level of alignment, and the z-axis the
four applied architectural viewpoints.
Second, these configuration options are applied to
multiple distinct architectural viewpoints (Kruchten,
1995), such as the system’s functionality (goal-driven
task management), its internal structure (agent com-
position), its dynamic interactions (multi-agent col-
laboration) as well as the involvement of contextual
resources such as tools and data (context interaction).
Stemming from these four viewpoints, we have dis-
cerned 12 architectural aspects, each with distinct au-
tonomy and alignment levels. This granularity facili-
tates a nuanced analysis of the system’s architectural
dynamics resulting from the interplay between auton-
omy and alignment across the system architecture,
laying the foundations for further analysis and rea-
soning about design decisions. The contributions of
this paper can be categorized as follows:
1. Multi-Dimensional Taxonomy. We introduce a
comprehensive multi-dimensional taxonomy tai-
lored to analyze and understand how autonomous
LLM-powered multi-agent architectures balance
the dynamic interplay between autonomy and
alignment across different architectural aspects.
For this purpose, our taxonomy provides hierar-
chical levels for both autonomy and alignment,
which are applied to distinct architectural view-
points and aspects, thus incorporating a third di-
mension.
2. Taxonomic Classification of Selected Systems.
We demonstrate the utility of our taxonomy
by classifying a selection of seven autonomous
LLM-powered multi-agent systems, which pro-
vides insights into the architectural dynamics of
the analyzed systems and identifies challenges
and development potentials. The taxonomic ap-
plication also serves as a first empirical validation.
Structure of the Paper. The remainder of this pa-
per is structured as follows. Section 2 gives a short
overview of related background. In Section 3, we in-
troduce our multi-dimensional taxonomy, incorporat-
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
86

ing specifications of autonomy and alignment levels
and their application to the system architecture. By
analyzing selected multi-agent systems, Section 4 il-
lustrates the utility of our taxonomy. Finally, Section
5 discusses key insights and concludes the paper.
2 BACKGROUND
2.1 Related Work
Existing Taxonomies. Taxonomies represent struc-
tured classification schemes employed to categorize
objects in a hierarchical manner according to spe-
cific criteria. They find applications in a wide range
of disciplines and domains. The field of agent sys-
tems spans a variety of configurations and operational
structures, with some systems operating as individ-
ual entities and others involving multiple interacting
agents.
• Taxonomies for Autonomous Systems mainly
categorize systems based on the level and type
of autonomy, intelligence, learning capabilities,
and ability to interact with their environment
(Wooldridge and Jennings, 1995; Brustoloni,
1991; Maes, 1995; Franklin and Graesser, 1996;
Tosic and Agha, 2004).
• Taxonomies for Multi-Agent Systems extend
beyond the confines of individual agent charac-
teristics, integrating the dynamics of interactions
and collaborations among multiple agents (Bird,
1993; Dudek et al., 1996; Van Dyke Parunak
et al., 2004; Moya and Tolk, 2007).
While these taxonomies have contributed signifi-
cantly to our understanding of autonomous agents
and multi-agent systems, they were developed prior
to the advent of large language models (LLMs), and
thus fall short in providing means to categorize and
understand the specific challenges and involved ar-
chitectural complexities posed by autonomous LLM-
powered multi-agent systems. Moreover, while the
concepts of autonomy and alignment are often dis-
cussed in AI literature (Narendra and Annaswamy,
2012; Russell, 2019) and also the system’s architec-
ture plays a fundamental role in software engineer-
ing (Bass et al., 2003), none of these existing tax-
onomies has so far applied a systematic approach to
either investigate architectural aspects or combine the
concepts of autonomy and alignment.
Current LLM-powered Multi-Agent Systems. In
response to limitations of large language models
(LLMs) handling task complexity (Kaddour et al.,
2023), autonomous multi-agent systems utilizing the
reasoning abilities of LLMs have emerged (see Sec-
tion 2.2). Currently, several projects are established
that aim at realizing such autonomous AI architec-
tures for accomplishing complex tasks based on mul-
tiple interacting agents and powered by large lan-
guage models (LLMs). Exemplary but represen-
tative autonomous multi-agent systems are AUTO-
GPT (Torantulino et al., 2023), BABYAGI (Naka-
jima, 2023), SUPERAGI (TransformerOptimus et al.,
2023), HUGGINGGPT (Shen et al., 2023), CAMEL
(Li et al., 2023), AGENTGPT (Shrestha et al., 2023)
and METAGPT (Hong et al., 2023). A recent sur-
vey is provided by (Wang et al., 2023), which focuses
on investigating and comparing the agents’ charac-
teristics and capabilities in terms of profile gener-
ation, memory operations and structures, planning,
tool integration and learning strategies. Complement-
ing this, another recent survey (Xi et al., 2023) of-
fers an overview of existing approaches, contextualiz-
ing them with foundational technical, methodical, and
conceptual paradigms. However, as we dive into the
specifics of current autonomous LLM-powered multi-
agent systems, striking the right balance between au-
tonomy and alignment emerges as a central challenge.
Given the exploratory state of the field, current sys-
tems exhibit a wide range of architectures, each with
its unique strategy for balancing autonomy and align-
ment dispersed across various architectural compo-
nents and mechanisms. The complexity of these sys-
tems underscores the importance of a taxonomy that
can provide a structured understanding and compari-
son of these systems.
2.2 System Characteristics
In the following, we shortly outline the main archi-
tectural characteristics of autonomous LLM-powered
multi-agent systems, as illustrated in Fig. 2.
Alignment Techniques
Memory
Role
Prompt
Prompt
collaborate
executes
interacts
with
develops
B
C
synthesis
Agent
Agent
Human
User
Large Language
Model (LLM)
Agent-Interaction Layer
User Interface
Response
Prompt
Preferences
Expert Tools
Data
Foundation Models
A
Context
System
Architect
specifies
break
down
Goal
Task
Task
Result
...
M
G
Figure 2: Overview of the primary characteristics of au-
tonomous LLM-powered multi-agent systems, enhanced by
contextual resources like tools and data.
G Goal-Driven Task Management. Autonomous
LLM-powered multi-agent systems are designed
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
87
to accomplish user-prompted goals or complex
tasks. For this purpose, the system employs an in-
teractive and multi-perspective strategy, by break-
ing down complex tasks into smaller, manageable
tasks, which are subsequently distributed among
various agents, each equipped with specific com-
petencies. A crucial aspect of this divide & con-
quer strategy lies in the effective orchestration and
the subsequent synthesis of partial results.
A LLM-Powered Intelligent Agents. Intelligent
agents structure the system as the foundational
components. Each agent is endowed with a
unique set of competencies, which include a
clearly defined role and an individual memory.
The backbone of their reasoning and interpreta-
tive capabilities is rooted in the incorporation of
large language models (LLMs). This enables the
agents not only to reflect upon the tasks or to plan
and process the assigned tasks efficiently, but also
to access and utilize contextual resources, as well
as to communicate with other agents.
M Multi-Agent Collaboration. The interaction
layer provides the workspace for a network of
LLM-powered agents. While executing the as-
signed tasks, these agents collaborate with each
other via prompt-driven message exchanges to
delegate responsibilities, seek assistance, or eval-
uate task results. Key to the agents’ collabora-
tion is to effectively combine the strengths of each
agent (cognitive synergy). The power of these sys-
tems emerges from the coordinated efforts of the
collective (society of mind (Minsky, 1988)).
C Context Interaction. Some tasks require the uti-
lization of contextual resources, such as expert
tools, data, further specialized foundation models,
or other applications. These resources extend the
agents’ ability to gather environmental informa-
tion, create or modify artefacts, or initiate external
processes, thus enables the agents to effectively
execute complex tasks.
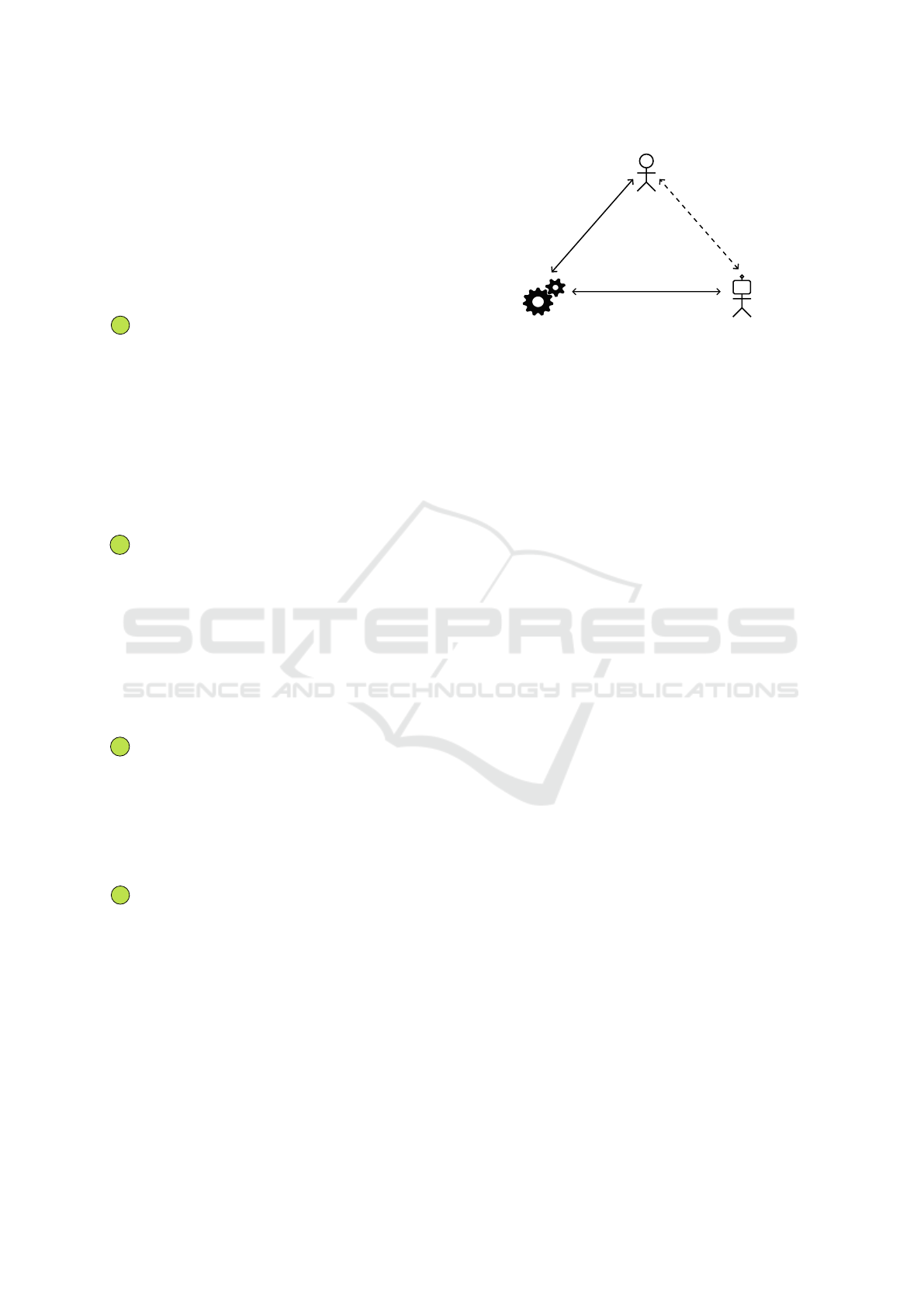
B Balancing Autonomy and Alignment. The dy-
namics of LLM-powered multi-agent systems are
characterized by a complex interplay between au-
tonomy and alignment. As captured in Fig. 3,
this complexity can be traced back to the tri-
adic interplay and inherent tensions among hu-
man users, LLM-powered agents, and governing
mechanisms or rules integrated into the system.
Alignment, in this context, ensures that the sys-
tem’s actions are in sync with human intentions
and values. On the other side of the spectrum,
autonomy denotes the agents’ inherent capacity
for self-organized strategy and operation, allow-
Human
User
LLM-powered
Agents
Automation / Autonomy
Automation / Customization
Supervision / Autonomy
Alignment
Collaboration
Rules &
Mechanisms
System Operation
Figure 3: Triadic interplay and dynamic tensions between
the decision-making entities in LLM-powered multi-agent
systems.
ing them to function independent of predefined
rules and mechanism and without human super-
vision. Moreover, in systems steered by user-
prompted goals, it becomes pivotal to distinct
between generic alignment aspects, in terms of
mechanisms predefined by system architects, and
user-specific preferences customized by system
users. However, from an architectural perspective,
autonomy and alignment transform into cross-
cutting concerns (Kiczales et al., 1997). They tra-
verse components and mechanisms across the ar-
chitectural infrastructure and dynamics. Achiev-
ing a balanced configuration of autonomy and
alignment is a crucial challenge, which directly
impacts the system’s efficiency and effectiveness.
For a comprehensive discussion of related work as
well as for a detailed specification and analysis of rel-
evant architectural concepts, please refer to extended
paper version (Händler, 2023).
3 MULTI-DIMENSIONAL
TAXONOMY
In this section, we introduce the system of our
multi-dimensional taxonomy, engineered to method-
ically analyze the interplay between autonomy and
alignment across architectures of autonomous LLM-
powered multi-agent systems. The taxonomy weaves
three crucial dimensions, i.e. hierarchical levels of au-
tonomy and alignment as well as architectural view-
points. Together, they form a three-dimensional ma-
trix for classifying system configurations (see Fig. 1).
Section 3.1 delves into the complexities of the
interplay between autonomy and alignment. Subse-
quently, Section 3.2, underscores the importance of
incorporating architectural viewpoints into the taxo-
nomic system. Rather than applying the autonomy-
alignment matrix flatly, we propose analyzing each
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
88

architectural viewpoint as well as further inherent
architectural characteristics individually. Such a
viewpoint-focused approach allows for a deeper and
more nuanced understanding of the systems, reflect-
ing the architectural dynamics and complexities. Fi-
nally, in Section 3.3, we unify these components,
mapping the autonomy-alignment dimensions and
levels onto aspects inherent to the viewpoints.
3.1 Interplay Between Autonomy and
Alignment
Autonomy and alignment, as interdependent and in-
terplaying concepts, have their roots in management
sciences and organizational behavior, playing inte-
gral roles in the ways teams and systems function
(Mintzberg, 1989; O’reilly Iii and Tushman, 2008).
In these fields, autonomy typically refers to the de-
gree of discretion employees or teams possess over
their tasks, while alignment denotes the degree to
which these tasks correspond to the organization’s
overall objectives. In the field of AI, the interplay be-
tween autonomy and alignment remains pivotal (Rus-
sell et al., 2015; Bostrom, 2017). AI systems, by na-
ture, operate with varying degrees of independence
and are often designed to accomplish complex tasks
that are potentially beyond human capabilities. How-
ever, uncontrolled autonomy can pose risks. If the
goals of an AI system deviate from those of its hu-
man supervisors, it could lead to unforeseen conse-
quences or uncontrollable side effects. As such, un-
derstanding and defining the bounds of autonomy and
alignment becomes essential for effective system op-
eration. For this purpose, we adopt a pragmatic per-
spective on both autonomy and alignment.
Table 1: Matrix showcasing the interplay between grada-
tions of alignment (vertical) and autonomy (horizontal) in
the context of LLM-powered multi-agent architectures.
Levels of
Autonomy &
Alignment
L0: Static L1: Adaptive L2: Self-
Organizing
L2: Real-time
Responsive
User-
Supervised
Automation
User-
Collaborative
Adaptation
User-
Responsive
Autonomy
L1: User-
Guided
User-Guided
Automation
User-Guided
Adaptation
User-Guided
Autonomy
L0: Integrated Rule-Driven
Automation
Pre-
Configured
Adaptation
Bounded
Autonomy
3.1.1 Autonomy
The degree of autonomy refers to the extent to which
an AI system can make decisions and act indepen-
dently of rules and mechanisms defined by humans.
For LLM-powered multi-agent systems, this trans-
lates to a system’s proficiency in addressing the goals
or tasks specified by the user in a self-organizing man-
ner, adapting and re-calibrating to the complexities
of a given situation. Autonomous multi-agent sys-
tems are by nature striving for this end-to-end auto-
matic goal completion and task management from a
user perspective. Automation pertains to tasks being
carried out without human input (Brustoloni, 1991;
SAE International, 2016), while autonomy pertains
to decisions about tasks being made without human
intervention (Franklin and Graesser, 1996; Parasura-
man et al., 2000; Beer et al., 2014). In the domain of
LLM-powered multi-agent systems, we look beyond
mere task automation, focusing on how these systems
internally manage their dynamics to fulfill user objec-
tives. Our taxonomy, therefore, distinguishes systems
on a spectrum of autonomy. Drawing from the triadic
interplay (Fig. 3), on the one end of the spectrum, we
see systems that heavily rely on predefined rules, set
by system architects. While they may execute tasks
autonomously, their decision-making process is con-
strained within a fixed set of parameters (low auton-
omy). On the other hand, we encounter systems char-
acterized by their ability for self-organisation and dy-
namic self-adaptation. Rather than relying on hard-
coded mechanisms, they harness the power of LLMs
to interpret, decide, and act, making them more adapt-
able to changing situations (high autonomy).
Autonomy Levels. The levels of autonomy, rep-
resented on the x-axis in our matrix (see Fig. 1
and Table 1), articulate the degree of agency of the
LLM-powered agents in making decisions regarding
the system operation, independently from predefined
mechanisms.
L0: Static Autonomy - At this foundational level,
systems are primarily automated, relying heav-
ily on the rules, conditions, and mechanisms
embedded by system architects. The systems
follow defined rules and predetermined mecha-
nisms. While the agents are not empowered to
modify these rules, some degree of flexibility re-
mains resulting from rule-based options and al-
ternatives.
L1: Adaptive Autonomy - Evolving from the static
level, systems at this stage possess the capabil-
ity to adapt their behavior within a structure and
procedural guidelines established by the system
architects. The LLM-powered agents are capa-
ble of adjusting the system’s operations within
this provided framework (such as flexible infras-
tructures and protocols) due to the needs of the
given application scenarios, but not beyond.
L2: Self-Organizing Autonomy - At this high-
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
89

est level of autonomy, LLM-powered agents
emerge as the principal actors, capable of self-
organization, actively learning and dynamically
tailoring their operations in real-time based on
environmental cues and experiences. However,
this might also include highly generic infrastruc-
tures that are modifiable by the LLM-powered
agents and thus allow self organisation.
3.1.2 Alignment
In the context of AI, the term alignment traditionally
refers to the challenge of ensuring that an AI sys-
tem’s behavior aligns with human intentions, values
or goals. This intricate problem, often framed as the
control problem, is a cornerstone of AI safety dis-
course (Bostrom, 2017; Russell, 2019). However,
when viewed through a practical lens, especially in
the context of autonomous LLM-powered multi-agent
systems, the alignment paradigm acquires a more
interactive, user-centric perspective (Amodei et al.,
2016), as it can be seen as a calibration of condi-
tions tied to user-prompted goals. This includes pref-
erences, policies, constraints, and boundaries which
collectively steer or regulate the system’s trajectory
towards achieving its set targets. Importantly, within
this framework, alignment is not seen as counter to
autonomy. Instead, it acts to complement and refine
it, being applicable across various levels of autonomy.
For our taxonomy, we combine two important di-
mensions of alignment: its origin and timing, reflect-
ing the dynamic tension between automated align-
ment mechanisms and human customization, as illus-
trated in Fig. 3. The origin delves into who dictates
the alignment, the system architect or the system user.
Meanwhile, timing refers to when the alignment is
specified, encompassing phases like pre-deployment,
post-deployment but prior to runtime, or even during
runtime. Furthermore, we’ve categorized alignment
into levels. The base level, or low alignment level, sig-
nifies alignment that’s already embedded into the sys-
tem’s design by the system architects. This intrinsic
alignment sets broad behavioral boundaries without
focusing on specific user preferences. On the other
hand, the high alignment levels are more adaptable
and centered around user-specified alignment. Here,
users have the flexibility to set their preferences either
before the system enters its runtime or, ultimately,
during its active operation.
Alignment Levels. The levels of alignment, repre-
sented on the y-axis in our matrix (see Fig. 1 and Ta-
ble 1), measure the degree to which users of the sys-
tem can influence or adjust the system’s behavior.
L0: Integrated Alignment - At this foundational
level, the alignment techniques are built directly
into the system’s architecture. In such system,
alignment mechanisms are static and rule-driven,
and cannot be altered by the users.
L1: User-Guided Alignment - Evolving from the
previous level, the User-Guided Alignment of-
fers a degree of customization. This level em-
powers users by allowing them to set or ad-
just specific alignment parameters, such as con-
ditions, rules, or boundaries, before the system
starts its operation. These interactions are pri-
marily facilitated via user interfaces designed to
capture user preferences in a structured manner.
L2: Real-Time Responsive Alignment - The high-
est level of alignment is represented by means to
adjust the system’s behavior in real-time. Thanks
to integrated real-time monitoring mechanisms,
the system can actively solicit user feedback user
decisions at critical junctures or decision points.
This responsiveness enables a high level of col-
laboration in terms of ongoing feedback between
the user and the system.
3.1.3 Combinations of Autonomy and Alignment
By combining these two dimensions in our matrix,
we provide a comprehensive view of the interplay be-
tween diverse gradations of autonomy and alignment
within LLM-powered multi-agent systems. Table 1
gives an overview of the employed levels and the re-
sulting spectrum of potential combinations.
Alignment
rule-driven
automation
user-guided
adaptation
user-responsive
autonomy
Automation
Autonomy
Balance
L0
L0
L1
L2
L1 L2
9
5
1
Figure 4: Interplay between autonomy and alignment: bal-
ancing evolving levels of dynamism and responsibilities of
both LLM-powered agents (autonomy) and human users
(alignment).
As illustrated in Fig. 4, departing from static and
rule-driven system configurations (automation), this
autonomy-alignment matrix captures the progression
of dynamism and responsibilities as we move along
the axes. On the y-axis, alignment levels represent
the gradation of human users’ involvement—from
integrated systems where the user’s role is passive
(L0), to real-time responsive setups demanding ac-
tive participation (L2). On the y-axis, the auton-
omy levels signify the evolving capabilities of LLM-
powered agents, progressing from static behaviors
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
90

(L0) to adaptive (L1) and, ultimately, self-organizing
mechanisms (L2). This matrix structure reflects the
triadic interplay and dynamic tensions illustrated in
Fig. 3. As we delve deeper into the matrix, the chal-
lenge becomes evident: ensuring balance between the
evolving responsibilities of LLM-powered agents and
the goals and intentions by the human users, ulti-
mately resulting in a dynamic collaboration between
agents and humans.
3.2 Architectural Viewpoints
Architectural viewpoints are a structured means to an-
alyze and assess complex systems from diverse per-
spectives focusing on selected aspects and layers of
an architecture (Bass et al., 2003; Clements et al.,
2003). Central to these viewpoints is the considera-
tion of stakeholder concerns, which inform and de-
termine the highlighted aspects and their interrela-
tions in each viewpoint. Providing a combined multi-
perspective analysis, viewpoints serve as an effective
framework to examine the structures and dynamics of
software architectures. For our taxonomy, we lever-
age viewpoints on autonomous LLM-powered multi-
agent systems. Rather than mapping the autonomy-
alignment taxonomy flatly onto the system, which
oversimplifies the multi-faceted nature of these sys-
tems, analyzing each architectural viewpoint individ-
ually offers a tailored lens, enabling to comprehend
the role and impact of autonomy and alignment within
the system. Each viewpoint reveals distinct insights
into the system’s behavior, internal interactions, com-
position, and context interaction, leading to a more
nuanced and comprehensive classification (Rozanski
and Woods, 2012).
«uses»
G
A
Functional
Viewpoint
Goal-driven
Task Mgmt.
Development
Viewpoint
Agent
Composition
Multi-Agent
Collaboration
Process
Viewpoint
M
Context
Interaction
Physical
Viewpoint
C
Figure 5: Architectural viewpoints oriented to the 4+1 view
model of software architecture (Kruchten, 1995) applied to
autonomous LLM-powered multi-agent systems.
3.2.1 Applied Viewpoints
For our taxonomy, we orient to Kruchten’s renowned
4+1 view model of software architecture (Kruchten,
1995), an established standard viewpoint model for
software architecture, adapting it to suit the archi-
tectural characteristics of LLM-powered multi-agent
systems (see Section 2.2). Our taxonomy encom-
passes the following four architectural viewpoints on
these systems (refer to Fig. 5 and 2):
G Goal-Driven Task Management (Functional
Viewpoint): Kruchten’s functional viewpoint
refers to the system’s visible functionalities
as experienced by its users (Kruchten, 1995).
In the context of autonomous LLM-powered
multi-agent systems, we see Goal-driven Task
Management as a manifestation of this functional
viewpoint. It entails the system’s capabilities and
mechanisms to decompose user-prompted goals
or complex tasks into manageable tasks, and sub-
sequently, orchestrate task execution, combine the
results, and deliver the final result forming the re-
sponse.
A Agent Composition (Development Viewpoint):
According to Kruchten, the development view-
point is primarily focusing on the system’s soft-
ware architecture, the breakdown into compo-
nents, and their organization (Kruchten, 1995).
In our context, we interpret this as Agent
Composition, focusing on the system’s internal
composition, particularly the assembly and con-
stellation of agents. It includes the types and roles
of agents, their memory usage, the relationships
between agents.
M Multi-Agent Collaboration (Process Viewpoint):
Kruchten’s process viewpoint concerns the dy-
namic aspects of a system, specifically the sys-
tem procedures and interactions between com-
ponents (Kruchten, 1995). We apply this to
the Multi-Agent Collaboration in our model,
emphasizing the collaborative task execution and
interactions among agents. This encompasses the
application of communication protocols, the dy-
namics of actions management, such as the actual
task execution, mutual task delegation, as well as
the evaluation and merging of task results on agent
level, as well as the management of communica-
tion components and prompt engineering.
C Context Interaction (Physical Viewpoint): Ac-
cording to Kruchten, the physical viewpoint in-
volves the system’s mapping to physical resources
(Kruchten, 1995). We extend this to Context
Interaction, focusing on the system’s interac-
tion with the external environment. It includes
how the system acquires, integrates, and utilizes
contextual resources such as external data, expert
tools, and further foundation models as well as
the organized distribution and utilization of con-
textual resources within the agent network.
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
91
alternatives
mandatory
«adapts to»
G
M
A
C
Goal-driven
Task Mgmt.
Multi-Agent
Collaboration
Agent
Composition
Context
Interaction
Decomposition
Goal-driven
Task Mgmt.
Orchestration Synthesis
Agent
Composition
Agent
Generation
Role
Definition
Memory
Usage
Network
Management
Multi-Agent
Collaboration
Communication
Protocol Mgmt.
Prompt
Engineering
Action
Management
Autonomy
Level
Static
(L0)
Adaptive
(L1)
Self-Organizing
(L2)
Alignment
Level
Integrated
(L0)
User-Guided
(L1)
Real-Time
Respons. (L2)
(a)
(b) (c)
(d)
(e)
Multi-Agent
Architectural Viewpoint
Context
Interaction
Resources
Integration
Resources
Utilization
Figure 6: Feature diagram showcasing the taxonomic structure. Each viewpoint integrates autonomy and alignment levels (a).
The diagram further illustrates viewpoint-specific aspects and mechanisms (b–e).
3.3 Interplay of Autonomy and
Alignment in the System
Architecture
As already illustrated, both autonomy and alignment
serve as cross-cutting concerns (Kiczales et al., 1997)
impacting the operational efficiency of various ar-
chitectural aspects across LLM-powered multi-agent
systems. Thus, in the following, we map our ma-
trix of autonomy and alignment levels onto the ar-
chitectural viewpoints. This projection crafts a three-
dimensional matrix, offering a prism through which
these systems can be analyzed and categorized (also
see Fig. 1). (Händler, 2023) provides a systematic
overview of the resulting viewpoint-specific combi-
nations of autonomy and alignment levels.
Viewpoint-Specific Aspects and Level Criteria.
As outlined above, architectural viewpoints provide
means to analyze certain aspects and aspect relations
of the system’s architecture in a multi-perspective
manner (Rozanski and Woods, 2012). We now sys-
tematize the viewpoint-specific aspects employed in
our taxonomy.
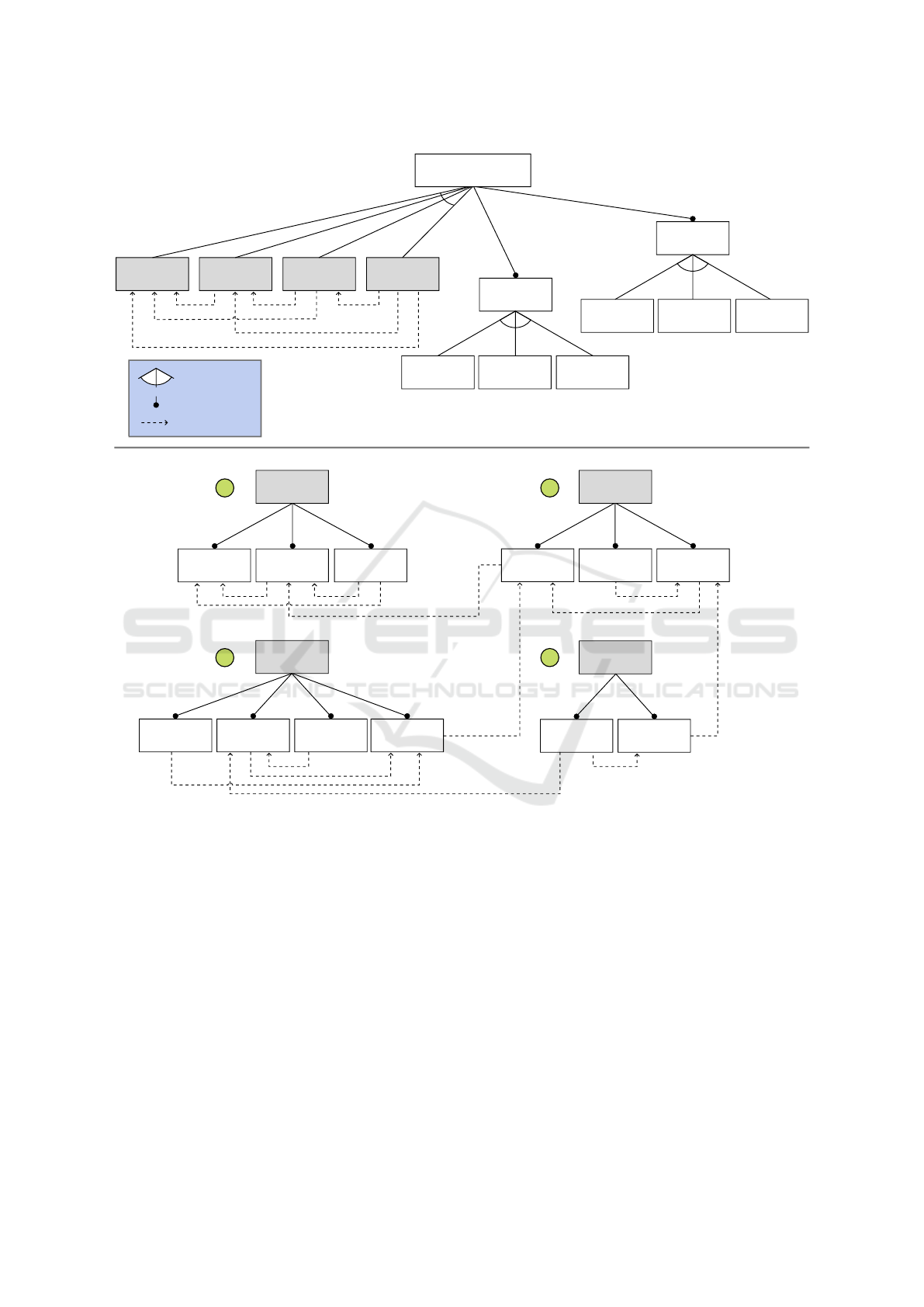
Fig. 6 gives an overview of our taxonomy’s char-
acteristics, structured through a feature diagram (Ba-
tory, 2005; Schobbens et al., 2007). In particu-
lar, Fig. 6 (a) structures the viewpoint-specific taxo-
nomic structure. Each of the four integrated view-
points provides a certain combination of autonomy
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
92

and alignment levels. As illustrated in Figs. 6 (b–e),
this structure is refined by viewpoint-specific aspects
and their interdependencies in terms of requirements-
driven dependencies (adapts-to), presuming a high-
autonomy system configuration (Händler, 2023).
These dependencies suggest that the capabilities of a
dependent aspect evolve in line with the needs and
stipulations of the aspect it points to. In turn, also
these viewpoint-specific aspects can be assessed by
the autonomy and alignment levels, resulting in a
more nuanced taxonomic classification.
For a comprehensive specification of level crite-
ria for both autonomy and alignment related to each
aspect, as well as for a discussion of the interdepen-
dencies among these aspects, please refer to (Händler,
2023).
4 CLASSIFICATION OF
SELECTED SYSTEMS
In order to demonstrate the practical utility of our
taxonomy, we analyze and classify selected existing
autonomous LLM-powered multi-agent systems. We
have chosen a set of seven state-of-the-art multi-agent
systems for this assessment: AUTOGPT (Torantulino
et al., 2023), BABYAGI (Nakajima, 2023), SUPER-
AGI (TransformerOptimus et al., 2023), HUGGING-
GPT (Shen et al., 2023), METAGPT (Hong et al.,
2023), CAMEL (Li et al., 2023), and AGENTGPT
(Shrestha et al., 2023). Each of these systems is main-
tained and available as open-source project. For each
selected system, we gathered relevant information by
examining the technical documentation and research
papers, where available, as well as reviewing the code
base. We further engaged with each system to explore
its real-time functionalities, with emphasis on align-
ment mechanisms available before and during run-
time.
Taxonomic Classification. The taxonomic classifi-
cation relies on a detailed assessment of autonomy
and alignment levels for viewpoint-specific aspects of
the systems. Table 2 reports on the results of assess-
ing these levels of autonomy (AU) and alignment (AL)
for aspects characterizing the four architectural view-
points applied by our taxonomy. In particular, for
Goal-driven Task Management, the aspects of de-
composition (Decom), orchestration (Orch), and syn-
thesis (Synth); for Multi-Agent Collaboration,
the aspects of communication-protocol management
(CommP), prompt engineering (PrEng), and action
management (ActM); for Agent Composition, the
aspects of agent generation (AGen), role definition
(RoleD), memory usage (MemU), and network manage-
ment (NetM); for Context Interaction, the aspects
of resource integration (Integ), and resource utiliza-
tion Util are distinguished. The viewpoint-specific
aspects with corresponding level criteria applied for
the assessment are detailed in (Händler, 2023).
Fig. 7 displays the derived autonomy and align-
ment levels per multi-agent system using radar (or
spider) charts (Tufte, 2001). In particular, archi-
tectural aspects form the multiple axes. The level
scheme (L0, L1, L2) for autonomy and alignment is
depicted by grey circles linking these axes. The blue
graph then represents the assessed autonomy levels,
the green dashed graph the corresponding alignment
levels. The extended paper version (Händler, 2023)
provides a detailed discussion of analysis results per
system as well as a comprehensive comparative anal-
ysis.
Strategies Across System Groups. We now explore
how different categories of systems balance the inter-
play between autonomy and alignment. Based on our
taxonomic classification and the resulting system pro-
files as illustrated in Fig. 7, we can categorize the se-
lected 7 systems under analysis into three distinct sys-
tem groups, which encompass general-purpose sys-
tems, central-controller systems, and role-agent sys-
tems. It’s important to note that our categorization
into these three groups, based on the systems chosen
for this exploration, doesn’t capture the entire spec-
trum of autonomous LLM-powered multi-agent sys-
tems. For a comprehensive overview of existing sys-
tems, we recommend referring to the recent surveys
provided by (Wang et al., 2023; Xi et al., 2023). In the
following, the key characteristics as observed from
the corresponding system profiles are discussed.
• General-Purpose Systems - representing multi-
agent systems designed for and adaptable to a
broad spectrum of tasks and applications. Within
the analyzed set of multi-agent systems, the fol-
lowing fall into this group: AUTO-GPT (Toran-
tulino et al., 2023), BABYAGI (Nakajima, 2023),
SUPERAGI (TransformerOptimus et al., 2023),
and AGENTGPT (Shrestha et al., 2023). Goals
are decomposed autonomously and represented
as prioritized task lists (L2 Decom). They em-
ploy a multi-cycle process framework performed
by dedicated task-management agents represented
by certain generic agent types, including a single
task-execution agent. Relations and communica-
tions between these agents are strictly predefined,
and agent conversations express as a monologue
of the task-execution agent, resulting in low au-
tonomy levels (L0) for communication protocol
(CommP), and network management (NetM). The
task-related actions are performed autonomously
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
93

Table 2: Assessment of autonomy (AU) and alignment (AL) levels across viewpoint-specific aspects of selected LLM-powered
multi-agent systems. Detailed level criteria for viewpoint-specific aspects are discussed in (Händler, 2023). * ZAPIER, a
workflow-automation tool, has been included to contrast the results.
LLM-powered
Multi-Agent
Systems
Goal-driven Task Mgmt. Multi-Agent Collaboration Agent Composition Context Interact.
Decom Orch Synth CommP PrEng ActM AGen RoleD MemU NetM Integ Util
AU AL AU AL AU AL AU AL AU AL AU AL AU AL AU AL AU AL AU AL AU AL AU AL
Auto-GPT (Torantulino et al., 2023) 2 0 0 0 1 0 0 0 1 0 2 0 0 0 1 0 0 0 0 0 0 0 2 0
BabyAGI (Nakajima, 2023) 2 0 0 0 1 0 0 0 1 0 2 0 0 0 1 0 0 0 0 0 0 0 2 0
SuperAGI (TransformerOptimus et al., 2023) 2 0 1 0 1 1 0 0 1 0 2 0 1 1 2 1 0 1 0 0 0 1 2 1
HuggingGPT (Shen et al., 2023) 2 0 1 0 2 0 0 0 2 0 2 0 2 0 2 0 1 0 0 0 2 0 2 0
MetaGPT (Hong et al., 2023) 2 0 0 0 2 0 1 0 1 0 2 0 0 0 0 0 0 0 1 0 0 0 2 0
CAMEL (Li et al., 2023) 2 0 0 0 1 0 0 0 1 0 1 0 0 1 1 1 0 0 0 1 0 0 0 0
AgentGPT (Shrestha et al., 2023) 2 1 1 0 1 0 0 0 1 0 2 0 1 1 2 0 0 0 0 0 0 0 2 1
Zapier* (Rahmati et al., 2017) 1 1 0 1 0 1 0 0 0 1 0 1 0 0 0 0 0 0 0 0 0 1 0 1
by the task-execution agent (mostly L2 auton-
omy ActM). While resource integration is based
on provided mechanisms (Integ), the resources
are selected and utilized by the LLM-powered
in a self-organizing manner (L2 autonomy for
Util), except for CAMEL; resulting in similar
autonomy profiles for the aforementioned aspects.
Besides from these commonalities, these sys-
tems distinguish in certain characteristics. Both
AUTO-GPT and BABYAGI employ generic task-
execution agent, and provide no further align-
ment options at all. Moreover, these systems em-
ploy a generic task-execution agent with prede-
fined agent roles and relations, resulting in L0 au-
tonomy for AGen and NetM. In contrast, SUPER-
AGI and AGENTGPT employ execution agents
with self-organizing agent roles (L2 autonomy for
RoleD), an adaptable orchestration process (L1
for Orch), and some alignment options, especially
for agent-specific aspects. Moreover, these sys-
tems employ execution agents, whose roles can be
customized by the user (L1 alignment for AGen).
• Central LLM Controller - marks a third group
specialized in leveraging and combining contex-
tual resources for accomplishing complex goals.
HUGGINGGPT (Shen et al., 2023) serves as an
archetype of such systems, utilizing resources es-
pecially in terms of existing ML models inte-
grated via HUGGING FACE. HUGGINGGPT is
characterized by a single central LLM-powered
control agent with monologue-based reflection
and planning. Language serves as generic in-
terface to manage the interplay between multi-
ple specialized foundation models. In compari-
son to other systems or system groups, we see the
highest levels of autonomy granted to this central
agent (mostly L2); also see Fig. 7 (d). Further-
more, we see a finite and artefact-oriented process
adaptable by the LLM-powered agent for orches-
trating the different model-related tasks (L1 au-
tonomy). Beyond prompting the task, there are no
further user-centric alignment options (L0 align-
ment).
• Role-Agent Systems - employ an interplay
or simulation between multiple dedicated roles
agents. This collaboration can serve different pur-
poses, such as simulating a discussion or solving
tasks that demand for a multi-perspective collabo-
ration. With defined roles in a certain environment
(such as in a software development project), their
application is bound to this application domain or
special purpose. Among the analyzed systems,
METAGPT (Hong et al., 2023) and CAMEL (Li
et al., 2023) represent such systems. In con-
trast to the general-purpose systems, the execution
agents play roles with dedicated responsibilities in
a certain application domain. Furthermore, these
role agents actually collaborate directly with each
other. In case of the two exemplary systems, this
collaboration is realized by communication pro-
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
94

Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
SuperAGI
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
CAMEL
(f)
(c)
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
BabyAGI
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
Zapier*
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
MetaGPT
(h)
(e)
(b)
Decom
level scheme (L0, L1, L2)
autonomy level
alignment level
architectural aspect
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
Auto-GPT
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
HuggingGPT
Decom
Orch
Synth
CommP
PrEng
ActM
AGen
RoleD
MemU
NetM
Integ
U�l
AgentGPT
(a)
(d)
(g)
Figure 7: Radar charts illustrating the system profiles based on an assessment of architectural aspects in terms of autonomy
(blue graph) and alignment (green dashed graph) levels. Detailed assessment data can be found in Table 2.
tocols employing a dynamic exchange between
agents with instructor and executor roles. In par-
ticular, CAMEL employs two such role agents
based on predefined agent types, but adjustable
by the user. In ongoing strict dialogue cycles,
the AI-user role agents instructs the AI-assistant
role agent to execute the tasks (L0 autonomy for
CommP). Similar to SUPERAGI, CAMEL requires
the user to specify the agents’ roles (L1 align-
ment). METAGPT, in contrast, internally assigns
predefined roles with responsibilities alongside
a waterfall development process (L0 alignment);
thus, also expressing a finite and artefact-oriented
process (L0 autonomy for Orch), terminating with
the produced and tested software program. How-
ever, like in real-world software project, refine-
ment iterations can follow, optional feedback cy-
cles make it adaptable for the agents (L1 auton-
omy for CommP).
Strategy Assessment. Beyond differences in the ap-
plied communication protocols, it is the flexibility of
agent roles (in relation to both autonomy and align-
ment) and further customization options for agent-
specific aspects that distinguishes the systems’ strate-
gies (see above). However, when examining how the
systems deal with autonomy and alignment across
further aspects, most systems and system groups
show similar strategies. The reasoning capabilities of
LLM-powered agents are especially leveraged in ar-
eas demanding high autonomy, such as the goal de-
composition, the actual execution of task-related ac-
tions, and the utilization of contextual resources. In-
terestingly, these high-autonomy aspects are mostly
combined with low alignment levels, resulting in
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
95

bounded autonomy aspects (refer to Table 1). A
closer look at aspect interdependencies, as depicted
in Fig. 6, reveals that these internally unbalanced as-
pects are accompanied by other low-autonomy as-
pects equipped with limited flexibility. For instance,
autonomous action management depends on strict or
predefined communication protocol. For further de-
tails, refer to (Händler, 2023). In these cases, the
predefined and rule-based mechanisms serve as inte-
grated alignment guiding and controlling the accurate
operation of the dependent autonomous aspects.
5 CONCLUSION
In this paper, we have introduced a comprehensive
multi-dimensional taxonomy engineered to analyze
how autonomous LLM-powered multi-agent systems
balance the dynamic interplay between autonomy and
alignment across their system architectures. For this
purpose, the taxonomy employs a matrix that com-
bines hierarchical levels of autonomy and alignment.
This matrix is then mapped onto various architec-
tural aspects organized by four architectural view-
points reflecting different complementary concerns
and perspectives. The resulting taxonomic system en-
ables the assessment of interdependent aspect con-
figurations in a wide spectrum, ranging from simple
configurations, such as predefined mechanisms com-
bined with system-integrated alignment (rule-driven
automation), to sophisticated configurations, such as
self-organizing agency responsive to user feedback
and evolving conditions (user-responsive autonomy).
Applied to 12 distinct architectural aspects inher-
ent to viewpoints, such as goal-driven task man-
agement, multi-agent collaboration, agent composi-
tion, and context interaction, this taxonomy allows
for a nuanced analysis and understanding of architec-
tural complexities within autonomous LLM-powered
multi-agent systems.
2
Through our taxonomy’s application to seven se-
lected LLM-powered multi-agent systems, its practi-
cal relevance and utility has been illustrated. In par-
ticular, it has been shown that a combined assess-
ment of autonomy and alignment levels across the ar-
chitectural aspects of each multi-agent system allows
for identifying system profiles that can indicate cer-
tain strategies for balancing the dynamic interplay be-
tween autonomy and alignment. This exploration of
exemplary current systems also revealed several chal-
lenges, which are detailed in (Händler, 2023).
2
For additional analyses, a more comprehensive discus-
sion and extended results, readers are referred to the ex-
tended paper version available on arXiv (Händler, 2023).
Most prominently, we observed a lack of user-
centric alignment options across all systems, with lit-
tle user-guided alignment, but no real-time responsive
alignment at all. Moreover, the systems exhibit high
autonomy levels mostly for certain aspects, such as
the goal decomposition, the action management, or
the utilization of contextual resources. In contrast,
other key aspects of the system operation show lim-
ited autonomy; aspects such as managing the commu-
nication protocol, memory usage, or agent network
are largely static, leaning heavily on predefined mech-
anisms.
Based on these and further findings, we espe-
cially see two promising avenues for the evolu-
tion of autonomous LLM-powered multi-agent sys-
tems. Firstly, by employing adaptable and self-
organizing communication protocols and agent net-
works, the systems’ role-playing capabilities could be
enhances, which enables them to better simulate com-
plex multi-perspective environments. By reflecting
diverse standpoints and strategies, this could also pave
the way for more in-depth inter-agent discussions and
creativity in problem solving. Secondly, the explo-
ration of real-time responsive systems, which can
adapt to evolving conditions as well as to user feed-
back during runtime, would foster dynamic collabo-
ration and hybrid teamwork between LLM-powered
agents and human users.
Departing from an exploratory stage, the field
of autonomous LLM-powered multi-agent systems is
rapidly evolving, resulting in a growing number of
promising approaches and innovative architectures.
With their current capabilities and inherent potentials,
such as multi-perspective domain simulations or col-
laborative environments of autonomous agents and
human coworkers, these systems could significantly
contribute to the progression towards advanced stages
of artificial intelligence, such as AGI or ASI. From a
pragmatic perspective, there are numerous opportuni-
ties for combining LLMs as general purpose technol-
ogy with the specifics of various application domains.
LLM-based multi-agent systems can serve as foun-
dation for developing corresponding domain-specific
application layers. The architectural complexities re-
sulting from the dynamic interplay between auton-
omy and alignment can be seen as one of the key
challenges in such systems. By providing a system-
atic framework for analyzing these complexities, our
taxonomy aims to contribute to these ongoing efforts.
For our subsequent endeavors, we aim at devel-
oping a comprehensive overview and comparison of
existing autonomous LLM-powered multi-agent sys-
tems, complementing existing literature reviews in the
field (Wang et al., 2023; Xi et al., 2023). To this end,
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
96

we intend to analyze and classify available systems
using our taxonomy. The identified system profiles
and balancing strategies resulting from this analysis
will then be combined with further investigations of
functional system capabilities.
Building on the foundation of our taxonomy, fu-
ture initiatives could venture into the following areas:
A dedicated exploration and systematization of align-
ment techniques, particularly tailored for LLM-based
interaction and application layers, could serve as ref-
erence for future systems. Moreover, the conception
of a methodological framework with instruments and
benchmarks for measuring the functional capabilities
of LLM-powered multi-agent systems could provide
a structured template to evaluate key metrics like effi-
ciency, accuracy, and scalability of these systems.
ACKNOWLEDGEMENTS
The author gratefully acknowledges the support from
the "Gesellschaft für Forschungsförderung (GFF)" of
Lower Austria, as this research was conducted at Fer-
dinand Porsche Mobile University of Applied Sci-
ences (FERNFH) as part of the "Digital Transforma-
tion Hub" project funded by the GFF.
REFERENCES
Amodei, D., Olah, C., Steinhardt, J., Christiano, P., Schul-
man, J., and Mané, D. (2016). Concrete problems in
AI safety. arXiv preprint arXiv:1606.06565.
Bass, L., Clements, P., and Kazman, R. (2003). Software ar-
chitecture in practice. Addison-Wesley Professional.
Batory, D. (2005). Feature models, grammars, and proposi-
tional formulas. In 9th International Software Product
Line Conference, pages 7–20.
Beer, J. M., Fisk, A. D., and Rogers, W. A. (2014). Toward
a framework for levels of robot autonomy in human-
robot interaction. Journal of human-robot interaction,
3(2):74.
Bird, S. D. (1993). Toward a taxonomy of multi-agent sys-
tems. International Journal of Man-Machine Studies,
39(4):689–704.
Bommasani, R., Hudson, D. A., Adeli, E., Altman, R.,
Arora, S., von Arx, S., Bernstein, M. S., Bohg, J.,
Bosselut, A., Brunskill, E., et al. (2021). On the
opportunities and risks of foundation models. arXiv
preprint arXiv:2108.07258.
Bostrom, N. (2017). Superintelligence. Dunod.
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., et al. (2020). Language models are few-
shot learners. Advances in neural information pro-
cessing systems, 33:1877–1901.
Brustoloni, J. C. (1991). Autonomous agents: Characteri-
zation and requirements. Carnegie Mellon University.
Bubeck, S., Chandrasekaran, V., Eldan, R., Gehrke, J.,
Horvitz, E., Kamar, E., Lee, P., Lee, Y. T., Li, Y.,
Lundberg, S., et al. (2023). Sparks of artificial general
intelligence: Early experiments with GPT-4. arXiv
preprint arXiv:2303.12712.
Chowdhery, A., Narang, S., Devlin, J., Bosma, M., Mishra,
G., Roberts, A., Barham, P., Chung, H. W., Sut-
ton, C., Gehrmann, S., et al. (2022). Palm: Scal-
ing language modeling with pathways. arXiv preprint
arXiv:2204.02311.
Clements, P., Garlan, D., Little, R., Nord, R., and Stafford,
J. (2003). Documenting software architectures: views
and beyond. In 25th International Conference on Soft-
ware Engineering, 2003. Proceedings., pages 740–
741. IEEE.
Dudek, G., Jenkin, M. R., Milios, E., and Wilkes, D. (1996).
A taxonomy for multi-agent robotics. Autonomous
Robots, 3:375–397.
Fabiano, F., Pallagani, V., Ganapini, M. B., Horesh, L.,
Loreggia, A., Murugesan, K., Rossi, F., and Srivas-
tava, B. (2023). Fast and slow planning. arXiv preprint
arXiv:2303.04283.
Franklin, S. and Graesser, A. (1996). Is it an agent, or just a
program?: A taxonomy for autonomous agents. In In-
ternational workshop on agent theories, architectures,
and languages, pages 21–35. Springer.
Hong, S., Zheng, X., Chen, J., Cheng, Y., Zhang, C.,
Wang, Z., Yau, S. K. S., Lin, Z., Zhou, L., Ran,
C., et al. (2023). MetaGPT: Meta programming for
multi-agent collaborative framework. arXiv preprint
arXiv:2308.00352.
Händler, T. (2023). Balancing autonomy and alignment: A
multi-dimensional taxonomy for autonomous LLM-
powered multi-agent architectures. arXiv preprint
arxiv:2310.03659. https://doi.org/10.48550/arXiv.
2310.03659.
Ji, Z., Lee, N., Frieske, R., Yu, T., Su, D., Xu, Y., Ishii, E.,
Bang, Y. J., Madotto, A., and Fung, P. (2023). Survey
of hallucination in natural language generation. ACM
Computing Surveys, 55(12):1–38.
Kaddour, J., Harris, J., Mozes, M., Bradley, H., Raileanu,
R., and McHardy, R. (2023). Challenges and ap-
plications of large language models. arXiv preprint
arXiv:2307.10169.
Kahneman, D. (2011). Thinking, fast and slow. Macmillan.
Kiczales, G., Lamping, J., Mendhekar, A., Maeda,
C., Lopes, C., Loingtier, J.-M., and Irwin, J.
(1997). Aspect-oriented programming. In
ECOOP’97—Object-Oriented Programming: 11th
European Conference Jyväskylä, Finland, June 9–13,
1997 Proceedings 11, pages 220–242. Springer.
Kojima, T., Gu, S. S., Reid, M., Matsuo, Y., and Iwasawa, Y.
(2022). Large language models are zero-shot reason-
ers. Advances in neural information processing sys-
tems, 35:22199–22213.
Kruchten, P. B. (1995). Architectural blueprints — the
“4+1” view model of software architecture. IEEE soft-
ware, 12(6):42–50.
A Taxonomy for Autonomous LLM-Powered Multi-Agent Architectures
97

Li, G., Hammoud, H. A. A. K., Itani, H., Khizbullin, D., and
Ghanem, B. (2023). CAMEL: Communicative agents
for "mind" exploration of large scale language model
society. arXiv preprint arXiv:2303.17760.
Lin, B. Y., Fu, Y., Yang, K., Ammanabrolu, P., Brahman,
F., Huang, S., Bhagavatula, C., Choi, Y., and Ren,
X. (2023). SwiftSage: A generative agent with fast
and slow thinking for complex interactive tasks. arXiv
preprint arXiv:2305.17390.
Maes, P. (1995). Artificial life meets entertainment: life-
like autonomous agents. Communications of the ACM,
38(11):108–114.
Maynez, J., Narayan, S., Bohnet, B., and McDonald, R.
(2020). On faithfulness and factuality in abstractive
summarization. arXiv preprint arXiv:2005.00661.
Minsky, M. (1988). The Society of mind. Simon and Schus-
ter.
Mintzberg, H. (1989). The structuring of organizations.
Springer.
Moya, L. J. and Tolk, A. (2007). Towards a taxonomy of
agents and multi-agent systems. In SpringSim (2),
pages 11–18.
Nakajima, Y. (2023). BabyAGI. https://github.com/
yoheinakajima/babyagi.
Narendra, K. S. and Annaswamy, A. M. (2012). Stable
adaptive systems. Courier Corporation.
Ouyang, L., Wu, J., Jiang, X., Almeida, D., Wainwright,
C., Mishkin, P., Zhang, C., Agarwal, S., Slama, K.,
Ray, A., et al. (2022). Training language models to
follow instructions with human feedback. Advances
in Neural Information Processing Systems, 35:27730–
27744.
O’reilly Iii, C. A. and Tushman, M. L. (2008). Ambidex-
terity as a dynamic capability: Resolving the innova-
tor’s dilemma. Research in organizational behavior,
28:185–206.
Parasuraman, R., Sheridan, T. B., and Wickens, C. D.
(2000). A model for types and levels of human in-
teraction with automation. IEEE Transactions on sys-
tems, man, and cybernetics-Part A: Systems and Hu-
mans, 30(3):286–297.
Park, J. S., O’Brien, J. C., Cai, C. J., Morris, M. R., Liang,
P., and Bernstein, M. S. (2023). Generative agents: In-
teractive simulacra of human behavior. arXiv preprint
arXiv:2304.03442.
Rahmati, A., Fernandes, E., Jung, J., and Prakash, A.
(2017). IFTTT vs. Zapier: A comparative study
of trigger-action programming frameworks. arXiv
preprint arXiv:1709.02788.
Rozanski, N. and Woods, E. (2012). Software systems
architecture: working with stakeholders using view-
points and perspectives. Addison-Wesley.
Russell, S. (2019). Human compatible: Artificial intelli-
gence and the problem of control. Penguin.
Russell, S. (2022). Artificial intelligence and the problem of
control. Perspectives on Digital Humanism, page 19.
Russell, S., Dewey, D., and Tegmark, M. (2015). Re-
search priorities for robust and beneficial artificial in-
telligence. AI magazine, 36(4):105–114.
SAE International (2016). Taxonomy and definitions for
terms related to driving automation systems for on-
road motor vehicles.
Schobbens, P.-Y., Heymans, P., Trigaux, J.-C., and Bon-
temps, Y. (2007). Generic semantics of feature dia-
grams. Computer networks, 51(2):456–479.
Shen, Y., Song, K., Tan, X., Li, D., Lu, W., and Zhuang,
Y. (2023). HuggingGPT: Solving AI tasks with Chat-
GPT and its friends in Hugging Face. arXiv preprint
arXiv:2303.17580.
Shrestha, A., Subedi, S., and Watkins, A. (2023). Agent-
GPT. https://github.com/reworkd/AgentGPT.
Sloman, S. A. (1996). The empirical case for two systems
of reasoning. Psychological bulletin, 119(1):3.
Thoppilan, R., De Freitas, D., Hall, J., Shazeer, N., Kul-
shreshtha, A., Cheng, H.-T., Jin, A., Bos, T., Baker,
L., Du, Y., et al. (2022). Lamda: Language models for
dialog applications. arXiv preprint arXiv:2201.08239.
Torantulino et al. (2023). Auto-GPT. https://github.com/
Significant-Gravitas/Auto-GPT.
Tosic, P. T. and Agha, G. A. (2004). Towards a hierarchical
taxonomy of autonomous agents. In 2004 IEEE In-
ternational Conference on Systems, Man and Cyber-
netics (IEEE Cat. No. 04CH37583), volume 4, pages
3421–3426. IEEE.
TransformerOptimus et al. (2023). SuperAGI. https://
github.com/TransformerOptimus/SuperAGI.
Tufte, E. R. (2001). The visual display of quantitative in-
formation, volume 2. Graphics press Cheshire, CT.
Van Dyke Parunak, H., Brueckner, S., Fleischer, M., and
Odell, J. (2004). A design taxonomy of multi-agent
interactions. In Agent-Oriented Software Engineer-
ing IV: 4th InternationalWorkshop, AOSE 2003, Mel-
bourne, Australia, July 15, 2003. Revised Papers 4,
pages 123–137. Springer.
Wang, L., Ma, C., Feng, X., Zhang, Z., Yang, H., Zhang,
J., Chen, Z., Tang, J., Chen, X., Lin, Y., et al. (2023).
A survey on large language model based autonomous
agents. arXiv preprint arXiv:2308.11432.
Wei, J., Wang, X., Schuurmans, D., Bosma, M., Xia, F.,
Chi, E., Le, Q. V., Zhou, D., et al. (2022). Chain-of-
thought prompting elicits reasoning in large language
models. Advances in Neural Information Processing
Systems, 35:24824–24837.
Wolf, Y., Wies, N., Levine, Y., and Shashua, A. (2023).
Fundamental limitations of alignment in large lan-
guage models. arXiv preprint arXiv:2304.11082.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: Theory and practice. The knowledge engineer-
ing review, 10(2):115–152.
Xi, Z., Chen, W., Guo, X., He, W., Ding, Y., Hong, B.,
Zhang, M., Wang, J., Jin, S., Zhou, E., et al. (2023).
The rise and potential of large language model based
agents: A survey. arXiv preprint arXiv:2309.07864.
Yudkowsky, E. (2016). The AI alignment problem: why it
is hard, and where to start. Symbolic Systems Distin-
guished Speaker, 4.
Zhang, S., Roller, S., Goyal, N., Artetxe, M., Chen, M.,
Chen, S., Dewan, C., Diab, M., Li, X., Lin, X. V., et al.
(2022). OPT: Open pre-trained transformer language
models. arXiv preprint arXiv:2205.01068.
KMIS 2023 - 15th International Conference on Knowledge Management and Information Systems
98
