
A Study on Gathering Staircase Information for Active Staircase
Entry of Wheelchair Stair Climbing Assistive Devices
Su-Hong Eom
a
, Jeon-Min Kang
b
, Ga-Young Kim
c
and Eung-Hyuk Lee
d
Department of Electronic Engineering, Tech University of Korea, Siheung City, Gyeonggi-do, South Korea
Keywords: Stairs Information, Autonomous Driving on Stairs, Intelligent Wheelchairs, LiDAR.
Abstract: Wheelchairs are the most commonly used auxiliary devices by people with mobility impairments, and
autonomous driving technology has recently been applied to these wheelchairs using robot technology.
However, in an autonomous driving environment, most stairs are recognized as obstacles. For autonomous
driving on stairs, recognition of stairs information must be preceded. Currently, the classification of stairs into
stairs and non-stairs is performed based on vision sensors and can be determined by a high recognition rate.
However, the measurement and estimation of the riser height value, tread depth value, and angle of pitch
value of stairs are not. Therefore, this study proposes a method of obtaining the shape information of stairs
using 2D LiDAR. The proposed method measured the riser height and tread depth of stairs using the K-Means
and RANSAC algorithm after obtaining the raw data by rotating the 2D LiDAR by 90 degrees, and based on
this, the angle of pitch value was calculated. The riser height and tread depth values were determined by about
±13mm on average, and the angle of pitch value showed the accuracy of ±1° accuracy through applying a
quantitative verification method for the proposed method.
1 INTRODUCTION
It is paying attention to the rapid increase in the
elderly group (aged people) since COVID-19
throughout the world. According to the "World Social
Report 2023" published by the UN, the number of
elderly people aged 65 or older is expected to reach
1.6 billion by 2050 (United Nations, 2023). It is
analyzed that this increase trend is progressing faster
in developing countries than in developed countries.
Such elderly people have difficulty walking due
to physical aging, and the frequency of outdoor
activities decreases compared to the younger age,
making it worse as they have disabilities (Miodrag
Počuč et al., 2021). These activity constraints become
passive in voluntary social participation and can lead
to psychological depression or lack of self-esteem
(AH Taylor et al., 2004).
People who have difficulty walking due to
physical ageing and disability are referred to as
mobility impairments, and most of them use cars with
a
https://orcid.org/0000-0001-8493-1432
b
https://orcid.org/0009-0008-9543-3373
c
https://orcid.org/0000-0003-4113-5457
d
https://orcid.org/0000-0002-4434-0694
guardians for convenience of their movement
(Miodrag Počuč et al., 2021; United Nations, 2022).
However, this situation suggests that more caregivers
are needed in the future society, but it is currently
expected that supply versus demand will not be kept
up due to a severe drop in fertility rates (United
Nations, 2023).
Currently, the elderly and the disabled people,
who are facing mobility impairments, use
wheelchairs as a means of mobility assistance after
cars, but they do not meet their mobility
independence. Therefore, the intelligence of
wheelchairs using robot technology is being actively
studied.
In the past, the study of intelligent wheelchairs
was mainly aimed at manipulating interfaces, posture
change, and obstacle recognition and avoidance for
the purpose of use by various disabled groups (Jesse
Leaman et al., 2017; Amiel Hartman et al., 2019).
In recent research on intelligent wheelchairs,
autonomous driving technology using robot
Eom, S., Kang, J., Kim, G. and Lee, E.
A Study on Gathering Staircase Information for Active Staircase Entry of Wheelchair Stair Climbing Assistive Devices.
DOI: 10.5220/0012255700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 747-753
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
747

technology has become a hot topic to solve the social
problems raised above. Since wheelchairs are not
much different from mobile robots due to their
mechanical characteristics, studies based on the AMR
(Autonomous Mobile Robot) technology are being
attempted (André R. Baltazar et al., 2019). However,
since the use environment of wheelchairs is used in
daily life, unlike AMR, further studies on the
detection and avoidance of various obstacles are
needed. Among them, countermeasures against stairs
are a must-resolve challenge. The reason for this is
that wheelchair users refer the environment as the
biggest travel restriction in their daily lives as mound
and stairs driving (Korean Consumer Agency, 2011).
Currently, the platform for wheelchairs to move
on stairs adopts an orbital wheel structure, but the
technology to automatically recognize and move on
stairs is insignificant (Weijun Tao et al., 2017; Bibhu
Sharma et al., 2022). A vision-based study is a
representative technology for recognizing stairs.
However, these technologies were developed for the
purpose of AMR or mobile robots to recognize stairs
as obstacles rather than driving environments, and the
problems and approaches raised in this study are
different (M Basavanna et al., 2021).
With the development of vision-based AI
technology after the 4th industry, the recognition rate
of stairs environments is more than 90% based on the
technology of image matching and pattern
comparison, but the rate in this technology for
estimating the stairs shape information, riser height
and tread depth, which are necessary for moving on
stairs, is not high (Chen Wang et al., 2023).
The reason why such information is needed is that
the angle of pitch value of the pitch line derived from
the shape of stairs is required for the orbital wheel
platform to ensure safe driving on stairs. If this
information is not recognized, a large impact occurs
due to the change in the center of gravity of the
platform in the landing section at the beginning and
end of stairs (Daisuke Endo et al., 2017).
The following two types of research on the stairs
information estimation are representative. The first is
a method of estimating stairs based on a number of
single distance detection sensors, and the recognition
rate is not high in the form of estimating the
approximate height of stairs and inferring the pitch
line, and it may not be applicable depending on the
stairs driving platform (Su-Hong Eom et al., 2020;
Hyun-Chang Hwang et al., 2021).
The second method uses a depth camera, which
has an excellent effect on straight line detection of
stairs through an algorithm such as the Hough
transform method for edge detection after
preprocessing image information, but has a problem
of varying accuracy due to a relatively low
recognition rate and some external environmental
factors such as light exposure (Jia sheng Liu et al.,
2020; Haruka Matsumura et al., 2022).
Therefore, this study proposes a method of
estimating the riser height and tread depth of stairs,
and the angle of pitch value of the pitch line using 2D
LiDAR in order to solve the problems of the existing
method.
Inferring the information of stairs based on the
information from LiDAR causes an increase in the
cost of the system compared to the method mentioned
above. However, the purpose of this study is that
wheelchair users autonomously drive on stairs using
an infinite orbit platform, and it is assume that the
platform is already equipped with a LiDAR sensor
system.
The proposed method is a little more intuitive
when using 3D LiDAR, but in an autonomous driving
system in mobile robots, 2D LiDAR is generally used
to solve the increase in the cost of operating its
system. For this reason, the stairs were vertically
scanned by rotating the LiDAR by 90° to estimate the
stairs information.
2 METHOD
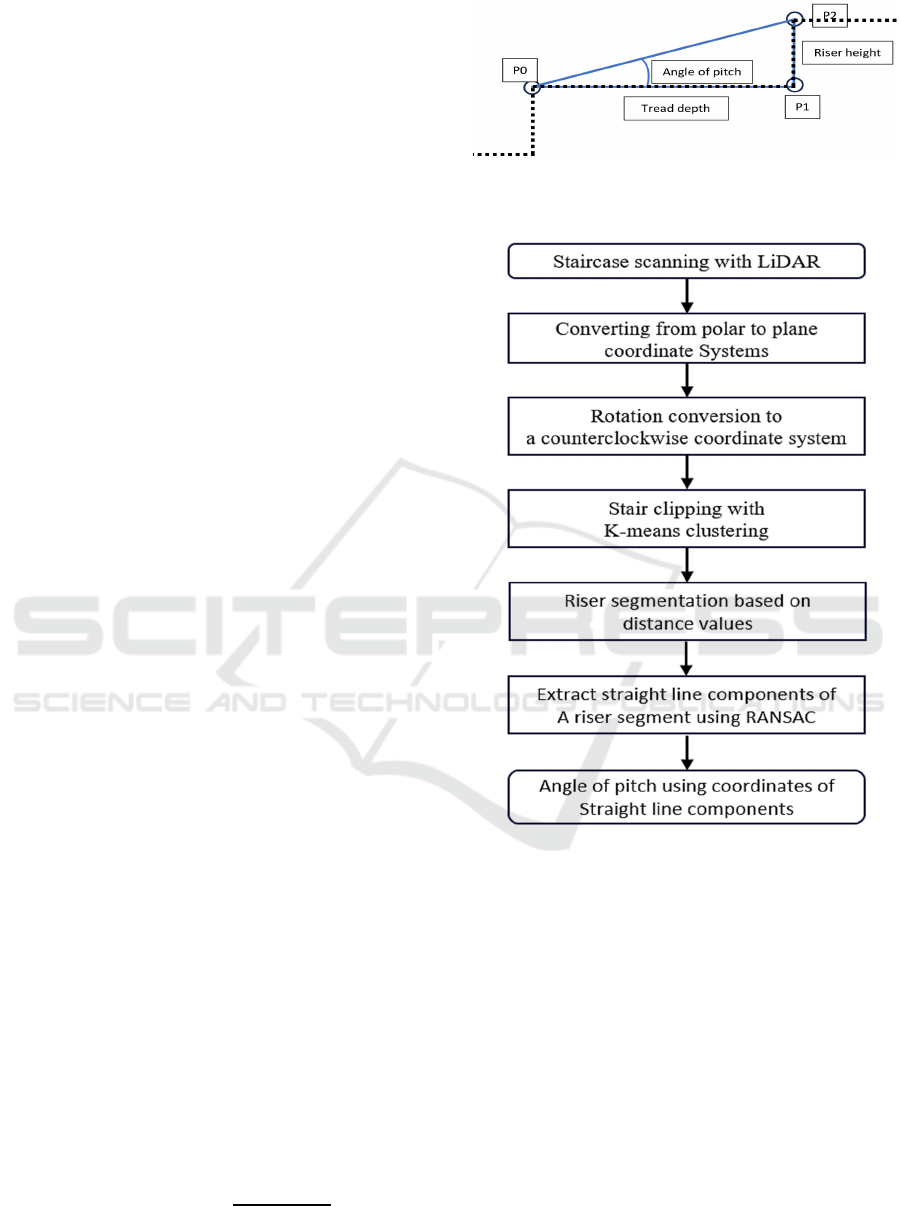
The riser height and tread depth of stairs vary
depending on the manufacturing and installation
environment, and the angle of pitch value of the
general walkable stairs is about 45° (HM
Government, 2013). as shown in Figure 1. However,
the mechanical characteristics of stairs are the same.
In addition, the shape measured may differ depending
on the operating principle or operation method of the
applied sensor. In this study, since 2D LiDAR is
applied to vertical plane measurement rather than
horizontal plane measurement, it is necessary to
convert the measurement data into the same form as
seen with the human eye through a coordinate
transformation process, and to adjust the sensing
range to be measured.
Figure 1: Schematic of stairs measurement limitations using
LiDAR.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
748

The riser height and tread depth measurements of
stairs require the separation of data for measuring
stairs information from the LiDAR raw data and the
data unnecessary for measurement. This is because
the tread depth cannot be measured depending on the
location of stairs viewed from LiDAR. Therefore, this
section describes the method of calculating the angle
of pitch value based on the riser height and tread
depth of stairs together with the above-mentioned
parts.
In this paper, the wheelchair direction is
straightforward to the staircase to scan the stairs
vertically with 2D LiDAR, and only the ascending
staircase is considered.
2.1 Limiting the Scan Area of the
LiDAR Sensor and Transforming
the Plane Coordinate System
2.1.1 Limiting the Scan Area of the Lidar
Sensor
LiDAR has a different scan range depending on the
product specifications. Therefore, it is necessary to
limit the scope to measure stairs at an installation
location, otherwise more information is measured
together, which acts as a noise component. For
example, in the case of the measurement situation as
shown in Figure 1, the environmental information
with the stairs is measured together, and there is a
trouble of performing an additional preprocessing
process to estimate the stairs information.
Therefore, this study attempts to limit the scan area
when measuring by LiDAR to prevent such problems
from occurring.
In this paper, the LiDAR scan area aims to set a
scan range of 15° upward (left) and 40° downward
(right) from the center of the scan range. This may
vary depending on the location of the LiDAR
installation. The effect of this setting is shown in
Figure 2.
Figure 2: LiDAR raw data before and after the scan range
limit.
2.1.2 Coordinate Transformation of the
LiDAR Sensor
LiDAR raw data is generally output as an angle value
and a distance value located on the target object
around the LiDAR. As these data are polar
coordinate, it is necessary to transform it into a two-
dimensional planar coordinate system in order to
estimate information on stairs. This coordinate
system transformation is performed by Equation (1)
and (2). In Equation (1) and (2), the negative
multiplication is based on the direction of the LiDAR
installation and may be omitted depending on the
situation.
𝑥
1
𝛾cos 𝜃 (1)
𝑦
1
𝛾𝑠𝑖𝑛 𝜃 (2)
2.2 Preprocessing Methods for
Measuring Stairs Information from
LiDAR Data
2.2.1 Data Clustering
Since the object information data of LiDAR consists
of distance information and angle information by
irradiating a laser in a fan shape at the center of
LiDAR, there are measurable and unmeasurable parts
depending on the location of the object and LiDAR.
In a data collection environment as shown in Figure
1, the first tread depth of the stairs may be
measurable, but depending on the height of the
LiDAR position, the tread depth of the second step
may not be measured. Therefore, it is necessary to
separate segments for measuring stairs information
from the LiDAR raw data.
The segment separation means the separation of
valid data and ineffective data. This process is
possible using a machine learning method. In the
machine learning method, the data separation is
performed as a way of classification or clustering, and
SVM (Support Vector Machine), KNN (K-Nearest
Neighbors), K-Means, and Hierarchical Clustering
are representative (Shweta Mittal et al., 2019;
Abiodun M. Ikotun et al., 2022). Among them, this
study aims to perform clustering through the K-
Means algorithm because the purpose is to implement
clustering based on the location similarity of data.
The reason for choosing clustering by the K-
Means algorithm is that the hierarchical clustering
algorithm goes through a hierarchical clustering
process and has the disadvantage of considering the
distance and similarity of cluster data in advance. In
addition, this is because the computational
A Study on Gathering Staircase Information for Active Staircase Entry of Wheelchair Stair Climbing Assistive Devices
749
complexity is higher than that of the K-Means
algorithm in real-time reflection of this system.
Although it cannot be concluded that the K-Means
algorithm has a shorter calculation time than the
Hierarchical Clustering algorithm, the method
proposed in this study is possible because the area
was limited when collecting the LiDAR raw data.
2.2.2 Data Linearization
In calculating the riser height and tread depth length
of the stairs from the clustered data, it is necessary to
linearize the data in order to calculate the angle of
pitch of the stairs from the clustered data showed in
2.2.1. This is because the LiDAR raw data results in
shape errors caused by foreign substances present in
the stairs and errors due to damages of the edge of the
stairs. the data linearization can be performed by
simply using a moving average filter, but it causes
data errors when unexpected noise components are
introduced. Therefore, in this study, the RANSAC
(Random Sample Consensus) algorithm is used. The
LSM (Least Square Method) algorithm is also
applicable, but the RANSAC algorithm is effective in
this case because it needs to be linearized into a
straight component of non-damaged stairs from the
previously mentioned data such as edge breakage
(Sunglok Choi et al., 2009).
2.2.3 Stairs Entry Angle Calculation
Algorithm for Stable Stairs Driving of
Orbital Wheels
As shown in Figure 1, the pitch line of the stairs
connects the end points of the stairs tread and
becomes a driving path when the track-type wheel
drives on the stairs. Here, the angle of the driving path
can be calculated as a trigonometric function with the
riser height value and the tread depth value as shown
in Equation (3), (4), and (5). The riser height value
selects a cluster with a large area value among
clusters derived through the K-Means algorithm,
linearizes the selected cluster through the RANSAC
algorithm, and segments continuous Y-axis data.
Based on the segmented data, the coordinates of both
end points of riser-1 and riser-2 are obtained as shown
in Figure 3, and the tread depth is calculated based on
this. Figure 4 shows its schematic diagram.
stair depth
|
𝑃
x𝑃
x
|
(3)
stair height
|
𝑃
y
𝑃
y
|
(4)
stair angle tan
stair height
stair width
(5)
Figure 3: Schematic diagram for calculating the entrance
angle of stairs.
Figure 4: Block diagram for calculating the entrance angle
of stairs.
3 EXPERIMENT AND RESULTS
3.1 Experimental Environment
For the theoretical verification of the method
presented in this study, an experiment was conducted
in a stairs environment as shown in Figure 5. The
experiment was conducted by rotating the 2D
LiDAR, which can measure the X-axis in a two-
dimensional plane at a height of 55cm from the
bottom of the stairs and 45cm from the front, by
limiting the angle of the Y-axis to a scan angle of
+15° to -40° based on 0°.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
750

Table 1: Stairs specification.
Stair riser height 180mm
Stair tread depth 260mm
Stair angle of pitch 35°
Table 2: LiDAR sensor specification.
Manufacturer /
Product Name
SLAMTEC /
RPLiDAR S1
Scan rate 10Hz
Scan angle 180°
Angular Resolution 0.35°
Max Distance range
white object 40m, black
object 10m
Figure 5: Experimental environment.
3.2 Experimental Results
3.2.1 Stairs Raw Data
For the theoretical verification of the method
presented in this study, the stairs were measured
as shown in Figure 1 in the experimental environment
as presented in Figure 5. As a result, it was detected
in three areas in the LiDAR scan area as shown in
Figure 6.
Shape-1 means the shape of the first step, and
Shape-2 and Shape-3 mean the riser of the second and
third steps respectively. The reason why the tread was
not measured from the second step is because of the
LiDAR measurement height, as described in 2.1.
Figure 6: Scan results of the stairs using 2D LiDAR.
3.2.2 Stairs Raw Data
For clipping Shape-1 only from the measured raw
data of the stairs (Figure 6), the clustering was
performed using the K-Means algorithm, and the
number of clustering for the cluster was determined
by two. The initial value of the centroid was set to a
random value and the K-Means++ method was
applied. The result is shown in Figure 7, and the
Figure 7: Results of the stairs data clustering using the
K-means and its centroid.
Figure 8: Measurement target stairs selected as a result of
comparison between each cluster.
A Study on Gathering Staircase Information for Active Staircase Entry of Wheelchair Stair Climbing Assistive Devices
751

centroid is a star shape in the graph. For the cluster
clipping for an actual stair information measurement
in two clusters, the clipping was performed through
comparing the area size of the cluster, and the results
are shown in Figure 8.
Algorithm 1 shows the pseudo code implemented
to segment the continuous Y-axis data for detecting
risers in this clipped Shape-1 data, and the set by user
value in the case of the set distance during this
experiment is 0.007 and the minimum segment length
is 10.
Input: set distance = set by user, index number =
0, minimum segment length = set by user
Result: segmented lines
for i from start to end of LiDAR data do
if calculate distance(x[i], y[i], x[i+1], y[i+1])
> set distance then
index number = i + 1
if i – index number > minimum segment
length
coordinates of x = from index number to i
in LiDAR data of x coordinate
coordinates of y = from index number to i
in LiDAR data of y coordinate
else
pass
else
pass
Algorithm 1: Segment separation algorithm for detecting
risers.
Figure 9 shows the results of applying the
RANSAC algorithm to the detected segments based
on the applied algorithm, and based on these two riser
coordinate values, the riser height and tread depth
were measured using Equation (3), (4) and (5) and the
angle of pitch value was calculated.
Figure 9: Results of applying RANSAC for the riser height.
The angle of pitch value is shown in Table 3.
These values are the results of 10 repeated
measurements while maintaining a certain distance in
the environment presented in Figure 5. The
measurement results showed that the riser height and
tread depth values were around ±13mm on average
and the angle of pitch value was ±1° accuracy
compared to the actual stairs information.
Table 3: Segment separation algorithm for detecting risers.
Trials
Riser
height[m]
Tread
depth[m]
Angle of
pitch[°]
1 0.272 0.186 34.3
2 0.269 0.198 36.3
3 0.271 0.186 34.4
4 0.27 0.198 36.2
5 0.268 0.186 34.7
6 0.269 0.199 36.4
7 0.269 0.187 34.8
8 0.271 0.198 36.1
9 0.271 0.198 36.1
10 0.269 0.198 36.3
Avg. 0.269 0.193 35.6
4 CONCLUSIONS
This study presented a method for calculating the
angle of pitch value based on shapes of stairs in order
to actively drive on stairs when entering or exit the
stairs using a wheelchair or wheelchair-combined
auxiliary device using an orbital wheel platform. The
proposed method used the K-Means and RANSAC
algorithms as preprocessing algorithms to vertically
scan the stairs using a 2D LiDAR sensor and to
measure the riser height and tread depth of the stairs
based on the distance and angle values between the
sensor and the stairs. The riser height value and tread
depth value were measured based on the two riser
coordinate values finally derived through the
RANSAC algorithm. Finally, the angle of pitch value
of the stairs was calculated using a trigonometric
function based on the measured riser height value and
tread depth value. The calculation results showed an
average of 36° in 10 trials, which showed an average
error of about 1° compared to the actual step
information, verifying the appropriateness of the
proposed algorithm.
Based on the algorithm presented in this study, it
is expected that it will be more flexible and safe drive
on stairs when entering or exit the stairs if applied as
a control parameter for autonomous stairs driving of
a wheelchair or wheelchair-combined assistive
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
752

device using an orbital wheel platform. However, the
algorithm presented in this study is a method verified
at 45cm from the front of the stairs and 55cm in
height, and the sensor attachment location should be
selected in consideration of this.
ACKNOWLEDGEMENTS
This research was supported by the MSIT(Ministry of
Science and ICT), Korea, under the ITRC
(Information Technology Research Center) support
program (IITP-2023-2018-0-01426) supervised by
the IITP(Institute for Information & Communications
Technology Planning & Evaluation)
This research was supported by 2023 Regional
Industry-linked University Open-Lab Development
Support Program through the Commercializations
Promotion Agency for R&D Outcomes (COMPA)
funded by Ministry of Science and ICT
(2023openlab(RnD)_01)
This research was supported by a grant of the
Korea Health Technology R&D Project through the
Korea Health Industry Development Institute
(KHIDI), funded by the Ministry of Health & Welfare,
Republic of Korea (HJ20C0058).
REFERENCES
United Nations. (2023). World Social Report 2023:
Leaving No One Behind In An Ageing World.
Miodrag Počuč, Valentina Mirović, Jelena Mitrović Simić,
Caglar Karamasa. (2021). Mobility analysis of persons
with disabilities. Discrete Dynamics in Nature and
Society.
AH Taylor, NT Cable, G Faulkner, M Hillsdon, M Narici,
AK Van Der Bij. (2004). Physical activity and older
adults: a review of health benefits and the effectiveness
of interventions. Journal of Sports Sciences. vol. 22, no.
8, pp. 703-725.
United Nations. (2022). Disability-Inclusive Communica-
tions Guidelines.
Jesse Leaman, Hung Manh La. (2017). A Comprehensive
Review of Smart Wheelchairs: Past, Present, and
Future. IEEE Transactions on Human-Machine
Systems, vol. 47, no. 4, pp. 486-499.
Amiel Hartman, Vidya K. Nandikolla. (2019). Human-
Machine Interface for a Smart Wheelchair. Journal of
Robotics.
André R. Baltazar, Marcelo R. Petry, Manuel F. Silva,
António Paulo Moreira. (2021). Autonomous
wheelchair for patient’s transportation on healthcare
institutions. SN Applied Sciences. vol. 3, no. 3.
Korean Consumer Agency. (2011). A Survey on Safety
Accidents in Wheelchairs.
Weijun Tao, Junyi Xu, Tao Liu. (2017). Electric-powered
wheelchair with stair-climbing ability. International
Journal of Advanced Robotic Systems. vol. 14, no. 4.
Bibhu Sharma, Branesh M. Pillai, Korn Borvorntanajanya,
Jackrit Suthakorn. (2022). Modeling and Design of a
Stair Climbing Wheelchair with Pose Estimation and
Adjustment. Journal of Intelligent & Robotic Systems.
vol. 106.
M Basavanna, M Shivakumar, K.R Prakash, Pratham
Bhomkar. (2021). ROS Based 3D Mapping of an
Indoor Environment Using Fusion of Orbbec Astra
Camera and Lidar on Turtlebot Mobile Robot. 2021 5th
International Conference on Electrical, Electronics,
Communication, Computer Technologies and
Optimization Techniques (ICEECCOT). pp. 323-327.
Chen Wang, Zhongcai Pei, Shuang Qiu, Zhiyong Tang.
(2023). RGB-D-Based Stair Detection and Estimation
Using Deep Learning. Sensors. vol. 23, no. 4.
Daisuke Endo, Atsushi Watanabe, Keiji Nagatani. (2017).
Stair Climbing Control for 4-DOF Tracked Vehicle
Based on Internal Sensors. Journal of Robotics.
Su-Hong Eom, Sun-Jong Na, Jung-Hwun You, Hyun-
Chang Hwang, Eung-Hyuk Lee. (2020). A Study on
Estimation of a Stair Entry Angle and Operation for The
Stair Climbing Aid Platform of Wheelchair. 2020
International Conference on Electronics, Information,
and Communication (ICEIC). pp. 867-869.
Hyun-Chang Hwang, Won-Young Lee, Jong-Hee Ha,
Eung-Hyuck Lee. (2021). A Study on Autonomous
Stair-climbing System Using Landing Gear for Stair-
climbing Robot. Journal of IKEEE. vol. 25, pp. 362-
370.
Jia sheng Liu, Jian po Guo, Zhen kai Xiong, Hua Li. (2020).
Design of intelligent recognition and positioning
algorithm for stairs based on depth camera. 2020 2nd
International Conference on Machine Learning, Big
Data and Business Intelligence (MLBDBI). pp. 339-
343.
Haruka Matsumura, Chinthaka Premachandra. (2022).
Deep-Learning-Based Stair Detection Using 3D Point
Cloud Data for Preventing Walking Accidents of the
Visually Impaired. IEEE Access. vol. 10, pp. 56249-
56255.
HM Government. (2013). Protection from falling, collision
and impact.
Shweta Mittal, Om Prakash Sangwan. (2019). Big Data
Analytics using Machine Learning Techniques. 2019
9th International Conference on Cloud Computing,
Data Science & Engineering (Confluence). pp. 203-
207.
Abiodun M. Ikotun, Absalom E. Ezugwu, Laith Abualigah,
Belal Abuhaija h, Jia Heming. (2022). K-means
clustering algorithms: A comprehensive review,
variants analysis, and advances in the era of big data.
Information Sciences. vol. 622, pp. 178-210.
Sunglok Choi, Taemin Kim, Wonpil Yu. (2009). Robust
Video Stabilization to Outlier Motion using Adaptive
RANSAC. 2009 IEEE/RSJ International Conference
on Intelligent Robots and Systems. pp. 1897-1902.
A Study on Gathering Staircase Information for Active Staircase Entry of Wheelchair Stair Climbing Assistive Devices
753
