
Research on Color Vision Tool Design Based on Detection Algorithms
Kun Zhang, Bo Zhang, Yue-wu Li, Shao-guang Zhang, Yu-sen Tao and Yong-xu Liu
*
The Army Engineering University of PLA, Nanjing, China
Keywords: Detection Algorithm, Color Vision Tool, Target Recognition.
Abstract: Accurate identification can quickly determine the state of the target, which is of great significance in both
military and industrial production. This article designs several sets of experiments based on detection algo-
rithms to evaluate the applicability and operational efficiency of color detection tools. The experimental re-
sults show that, compared with the color detection tool in Cognex DIP, the color detection tool basically
meets the design requirements and is equivalent in efficiency to the reference software. It can be applied to
military target recognition and industrial applications.
1 INTRODUCTION
In the field of military applications, accurately
identifying targets can improve rapid response
capabilities, and accurately identifying unexploded
ordnance can provide accurate positioning.
Therefore, rapid recognition technology has broad
application space and significant practical
significance in the future. The design of color visual
tools mainly includes two aspects: firstly, color
feature extraction; The second is the measurement of
color difference. In the conventional design field, the
hue component (H component) in the color space
based on human visual characteristics represents the
fundamental color, i.e. the main wavelength of the
spectrum. The distribution of the hue histogram
represents the overall color distribution of the target
(Ma Rui-qing, 2019). When identifying non
functional targets or the product coloring is incorrect,
it will be reflected on the hue histogram. Therefore,
by comparing the difference in hue histograms
between the current target image and the template
image, it is determined whether the current product
coloring is correct (or acceptable), and then the
target is identified and distinguished.
2 DESIGN REQUIREMENTS
The design requirements for color visual tools
mainly include the following aspects: 1) Color
feature selection: Provide at least one color feature
for color detection. 2) Color difference measurement:
provide at least one color difference measurement
method. 3) Applicability: It can be applied to several
application scenarios, such as identifying military
targets or inspecting the coloring degree of industrial
products. 4) Job efficiency: It is equivalent to the
reference software in terms of work time scale, at
the same level of magnitude. According to the
design principles and requirements, develop a basic
algorithm for color detection, as shown in Figure 1
(
Safdar, 2017).
Figure 1: Basic framework diagram of color detection
algorithm.
20
Zhang, K., Zhang, B., Li, Y., Zhang, S., Tao, Y. and Liu, Y.
Research on Color Vision Tool Design Based on Detection Algorithms.
DOI: 10.5220/0012273100003807
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (ANIT 2023), pages 20-25
ISBN: 978-989-758-677-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

3 COLOR FEATURE
EXTRACTION
Color features mainly refer to the description of the
color information of an image (or product), such as
how much red it contains and how much blue it
contains. Although the RGB color space also
contains color information, it is difficult to quantify
and the expression is not intuitive enough. The hue
components in HSI color space intuitively describe
basic color information. The statistical histogram
distribution based on hue components represents the
overall color distribution of the product, therefore,
hue histograms can be used as color features for
color detection.
3.1 HSI Color Space
Figure 2: HSI color space.
The HSI color space separates the intensity of colors
from color information, which is determined by light
intensity, while color information is described by
two parameters: hue and saturation. Hue represents
the basic color, which is the main wavelength of the
spectrum. Saturation is a measure of the purity of a
color, representing the amount of mixed white light
in the color, which is the ratio of peak height to the
entire spectral distribution. The geometric
description of the HSI color space is shown in
Figure 2, which is a cylindrical coordinate space
(Shamey, 2015). The color tone in the figure is
described as the angle between the ray formed by the
center of the cylinder and the color point to the
reference line, with a range of 0°~360°; Saturation is
described as the ray distance from the color point to
the center of the cylinder; Brightness is expressed as
the axial height, and the plane perpendicular to the
brightness axis in a cylinder is a first order
brightness plane. The mapping relationship between
HSI color space and RGB color space is:
>−
≤
=
GBif
GBif
H
,360
,
θ
θ
,
−−+−
−+−
=
−
2/12
1
)])(()[(
)]()[(
2
1
cos
BGBRGR
BRGR
θ
(1)
{}
BGR
BGR
S ,,min
)(
3
1
++
−=
;
(2)
3/)( BGRI ++=
.
(3)
For the convenience of processing, the range of
values for the H, S, and I components is uniformly
adjusted to [0,255].
3.2 Tone Histogram and Filtering
Processing
The hue histogram of an image is a one-dimensional
discrete function
ℎ(𝑘)=𝑛
, 𝑘 =0,1,⋯ ,255
(4)
Among them,ℎ(𝑘) is the image hue histogram, n
k
is
the sum of the hue values in the image equal to the
number of k pixels, and the hue value range of the
image is [0,255].
(a) Input RGB image
(b) Color tone histogram of input RGB
Figure 3: Hue histogram.
Figure 3 shows a schematic diagram of an image
tone histogram. The rectangular area of the image
shown in Figure 3 (a) mainly contains two tones,
one is blue as the background and the other is green
as the target. Figure 3 (b) is a hue histogram of the
rectangular area of the image in Figure 3 (a). It can
be seen from the graph that the two peaks in the hue
histogram correspond exactly to blue and green.
Therefore, tone histograms can effectively reflect the
content of a certain color in an image.
According to formula (2), when the pixel
saturation is very low, that is, the color is close to
neutral gray, and its three RGB components are very
close, the hue value calculated using formula (1) is
easy to shake, and it contains very little color
information. Therefore, pixels with saturation below
a certain threshold SatThr do not participate in the
statistics of hue histograms.
Research on Color Vision Tool Design Based on Detection Algorithms
21
From Figure 3 (b), it can be seen that due to the
influence of noise, there are usually many small
spikes in the tone histogram. To improve the anti
noise interference ability of color detection, smooth
denoising can be performed on the tone histogram.
Gaussian filter is the most widely used low-pass
filter. The mathematical expression of one-
dimensional zero mean Gaussian function is:
𝑔(𝑥)=
√
𝑒
;
(5)
Among them, 𝜎 is the width control parameter of
Gaussian function.
For discrete signals, set the filter width to 𝑊, the
half width of the filter is 𝑊
=Int(
),
Int(
⋅)is the
Rounding Function, then 𝜎 = 𝑊
/4. The formula
for constructing filter coefficients is:
𝑓
(𝑖)=𝑔(𝑖 ) 𝑎
⁄
, 𝑖 = −𝑊
, −𝑊
+ 1,..., 𝑊
;
(6)
Among them,𝑎 =
∑
𝑔(𝑗)
.
Filtering the tone histogram with a Gaussian filter is
essentially a convolution calculation as follows:
ℎ′(𝑥)=
∑
𝑓
(𝑖)ℎ(𝑥 + 𝑖)
;
(7)
Among them, ℎ(𝑥) is the hue histogram before
filtering, ℎ′(𝑥) is the filtered hue histogram, 𝑓(𝑖) is
Gaussian filter, 𝑎 = −𝑊
, 𝑥 =0,1,⋯ ,255.
For the convolution of equations (7), the
boundary filling strategy cannot use the
conventional nearest neighbor filling strategy. From
the color bars in the tone histogram, it can be seen
that the red tones at both ends of the histogram are
physically continuous, but are artificially separated
during mathematical representation. Therefore, it is
necessary to consider this physical characteristic
when filling the boundary, and thus equation (7) is
improved to:
ℎ′(𝑥)=
∑
𝑓
(𝑖)ℎ
(
(𝑥 + 𝑖 + 𝐿)%𝐿
)
;
(8)
Among them, 𝐿 is the length of the hue
histogram data, % is the modulo operation.
(a) Original tone histogram
(b) Filtered hue histogram
Figure 4: Comparison of tone histograms before and after
filtering.
Figure 4 is a comparison diagram of the tone
histogram before and after filtering, from which it
can be seen that the small peaks in the original tone
histogram are well smoothed.
4 COLOR DIFFERENCE
MEASUREMENT
According to the above description, the steps for
measuring the difference in tone histograms are:1)
generating high and low thresholds for tone
histograms based on the tone histograms of the
template image; 2) Compare the high and low
thresholds of the target image's hue histogram with
the template image's hue histogram, and count the
number of out of tolerance hues (Xiao,2011).
The threshold of the hue histogram can be
determined by the percentage of upper and lower
deviations. Set the color tone histogram of the
template image is 𝐻
(𝑘); the percentage of upper
deviation is 𝑃
up
; the lower deviation percentage is
𝑃
low
; the high and low threshold of the hue
histogram can be determined as:
HTh
r
u
p
(𝑘)=(1+𝑃
up
)𝐻
(𝑘);
(9)
HTh
r
low
(𝑘)=(1−𝑃
low
)𝐻
(𝑘);
(10)
Among them,
HThr
up
(𝑘) represents high
threshold for tone histogram,
HThr
low
(𝑘) represents
low threshold for tone histogram.
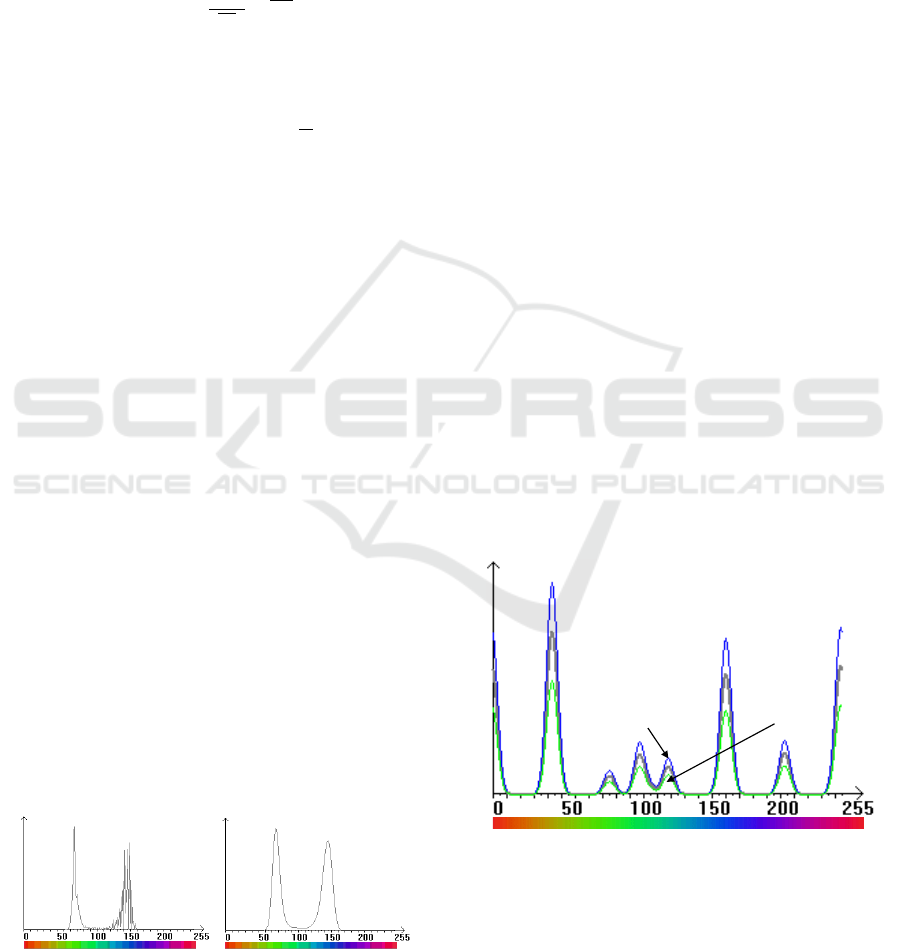
High Threshold
Low Threshold
(a)
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
22

Out of tolerance part
0 50 100 150 200 255
Target image
High Threshold
Low Threshold
(b)
Figure 5: Tone histogram threshold diagram and out of
tolerance diagram.
Figure 5 (a) is a schematic diagram of the high
and low threshold values of the hue histogram when
the percentage deviation between the upper and
lower parts is 30. The advantage of calculating the
high and low threshold through the percentage of
upper and lower deviations is that it takes into
account the inherent frequency of a certain color
tone in the template image, that is, the allowable
deviation of a higher frequency color tone is
relatively large, as shown in Figure 5 (a).
Set the hue histogram of the target image as
𝐻
(𝑘), the number of out of tolerance tones can be
calculated using the following formula:
𝑁 =
∑
Count𝐻
(𝑘)<
HThr
low
(𝑘) 𝑂𝑅 𝐻
(𝑘)>HThr
u
p
(𝑘);
(
11)
Among them, 𝑁 represents the number of out of
tolerance tones. Count(⋅) represents a counting
function, 1 is counted when the conditions in
parentheses are met, otherwise 0 is counted.
Figure 5 (b) is a schematic diagram of the color
tone histogram out of tolerance. From it, it can be
seen that the target image has a difference in blue
and green tones.
In summary, the overall process of the color
detection algorithm is shown in below, which mainly
includes:
Step 1. ROI Editing Tool: used to define ROI
regions. If there is no ROI region definition, color
detection is directly performed on the entire image.
Step 2. Color Space Conversion: Transfer the
RGB color space of the image to the HSI color space.
Step 3. Generate Initial Tone Histogram:
Generate an initial tone histogram based on H, S
components, and saturation thresholds.
Step 4. Initial Tone Histogram filtering:
construct a Gaussian filter according to the half
width of the filter and filter and smooth the initial
tone histogram.
Step 5. Generate Hue Histogram Threshold:
Based on the percentage of upper and lower
deviations, generate the template image hue
histogram high and low thresholds.
Step 6. Measurement of Hue Histogram
Difference: Compare the hue histogram of the target
image with the high and low threshold of the
template image hue histogram, and count the
number of out of tolerance hues.
Step 7. Detection Result Judgment: If the
number of out of tolerance tones is greater than the
given threshold, the image color is judged to be out
of tolerance and the out of tolerance tone
information (standard value and out of tolerance
amount) is returned; Otherwise, it is judged that the
image color is not out of tolerance.
5 EXPERIMENTAL DESIGN AND
ANALYSIS
5.1 Applicability Evaluation
The applicability mainly refers to the applicability of
color detection tools to various applications. Two
sets of experiments were designed to evaluate their
applicability: 1) detecting typical Demo images in
Cognex DIP; 2) Detect offset printing images. The
detection parameters of LLV( Luster Light Vision )
and Cognex are shown in Table 1.
Table 1: Applicability Evaluation Test Parameters.
LLV Cognex DIP
Parameter
Type
Parameter
value
Parameter
Type
Parameter
value
ROI Full graph ROI Full graph
saturation
threshold
10
saturation
threshold
608
Upper
deviation
percentage
20
Upper
deviation
percentage
20
Lower
deviation
percentage
20
Lower
deviation
percentage
20
Filter half
width
14
Smoothing
factor
4
Over tone
threshold
30
Over tone
threshold
30
1)Detect Demo images in Cognex DIP
Figure 6 (a) (b) shows two demo images in Cognex
DIP, with Figure 6 (a) as the template image and
Figure 6 (b) as the target image.
Research on Color Vision Tool Design Based on Detection Algorithms
23
(a) Template image
(b) Target image
Target image
Target image
(c) Detection result of LLV (d) Detection result of Cognex DIP
Figure 6: Demo image and two detection results.
Figure 6 (c) (d) shows the detection results of the
image in Figure 6 (a) (b), where Figure 6 (c) is a
histogram representation of the detection results of
LLV, and Figure 6 (d) is a histogram representation
of the detection results of Cognex. Comparing these
two histogram representations, it can be seen that
both detect that the target image has more green and
less blue compared to the template image, which is
completely consistent with the test image. LLV
detected 46 out of tolerance tones, Cognex detected
46 out of tolerance tones, and the number of out of
tolerance tones was consistent.
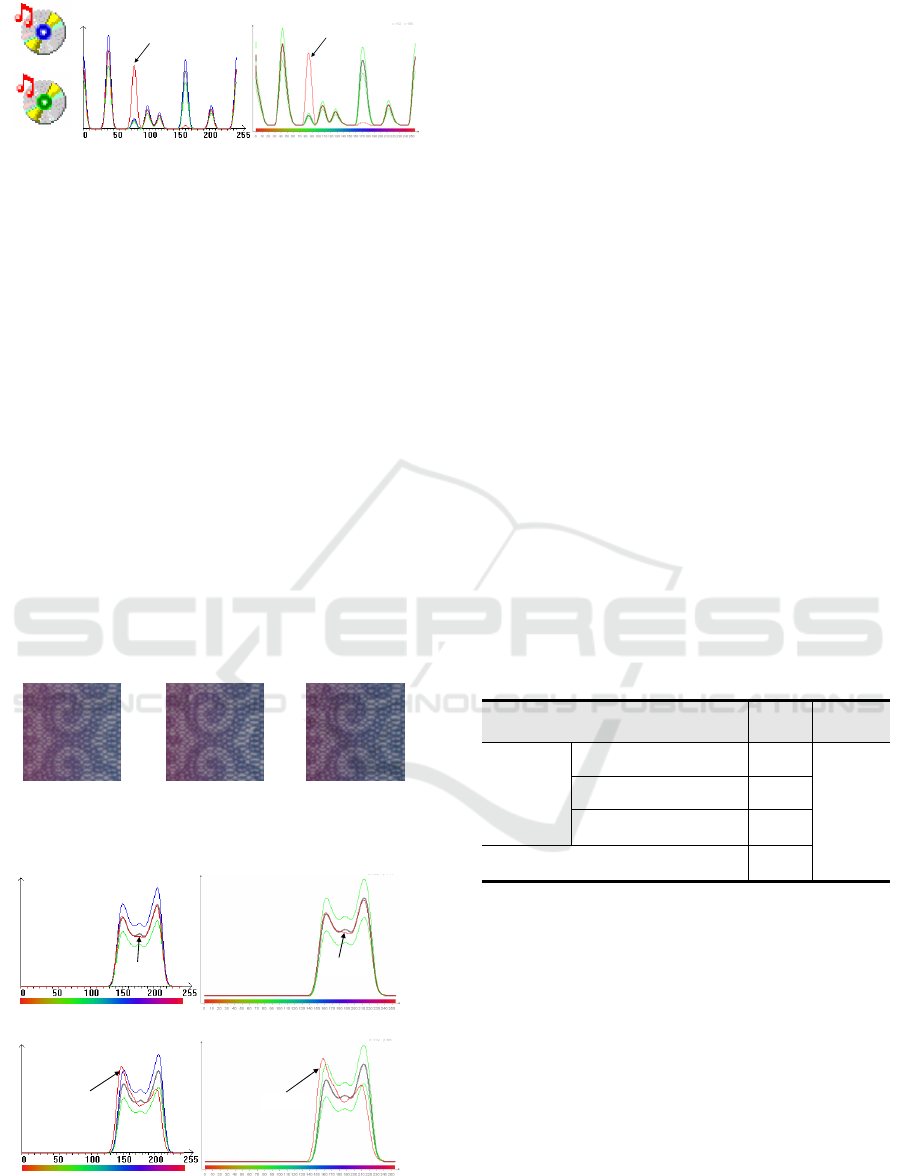
2)Detect Offset Printing Images
Figure 7 shows the offset printing image, where
Figure 7 (a) is the template image, Figure 7 (b) is the
target image 1, which belongs to the same batch of
products as the template image, and Figure 7 (c) is
the target image 2, which is not the same batch of
products as the template image.
(a) Template image
(b) Target image 1
(c) Target image 2
Figure 7: Offset printing image.
(a) Detection result of LLV(Target image 1)
(b) Detection result of Cognex DIP(Target i mage 1)
目标图像
(c) Detection result of LLV(Target image 2) (d) Detection result of Cognex DIP(Target image 2)
Target image
Target image
Target image
Target image
Figure 8: Detection results of offset printing image.
Figures 8 show the detection results of the
images in Figures 7. For target image 1, LLV
detected 12 out of tolerance tones, while Cognex
detected 9 out of tolerance tones; For target image 2,
LLV detected 48 out of tolerance tones, while
Cognex detected 44 out of tolerance tones. The
number of out of tolerance tones is basically the
same, and the subtle differences are mainly caused
by different histogram filtering strategies, which do
not affect the detection results. For target image 1,
the detection results are all good; For target image 2,
the detection results are all defective products.
3)Efficiency Evaluation
Detection efficiency is also an important focus of
color detection tools. Test the efficiency of color
detection on the images in Figures 7, which image
format is 119×116.
The testing environment is a Pentium 4 CPU
with a main frequency of 2.8GHz, 1GB Byte of
memory, Windows XP operating system, and the
compilation environment is VC6.0 Release version.
Table 2 provides a list of the time required for color
detection by LLV and Cognex respectively. From it,
it can be seen that the time consumption of LLV is
equivalent to that of Cognex DIP.
Table 2: Time consumption for color space conversion
under different high-order byte
bits (ms).
Time consumption list LLV
Cognex
DIP
Sub item
time
consumption
Color Space Conversion 4.03
2.37
Histogram filtering 0.06
Histogram comparison and
out of tolerance detection
0.01
Total time consumption 4.10
6 CONCLUSION
From the aforementioned experiment, the following
basic conclusions can be drawn:
Capable of effective color detection of typical
demo images and offset images in Cognex
DIP;Under equivalent parameter settings, the
number of out of tolerance tones detected by LLV is
basically the same as the number of out of tolerance
tones detected by Cognex DIP. The time
consumption of LLV is equivalent to that of Cognex
DIP.
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
24

REFERENCES
Ma Rui-qing, Liao Ning-fang.Influence of Illuminant
Chromaticity on Color Constancy Under RGB-LED
Light Source[J]. Acta Optica Sinica, 2019, 39(09):418-
426.
Safdar M,Cui G,Kim Y J,et al. Perceptually uniform color
space for image signals including high dynamic range
and wide gamut[J]. Optics Express, 2017,
25(13):15131-15151.
Shamey R,Zubair M,Cheema H.Effect of field view size
and lighting on unique-hue selection using Natural
Color System object colors[J]. Vision Research, 2015,
113: 22-32.
Xiao K,Wuerger S,Fu C,et al. Unique hue data for colour
appearance models. Part I: Loci of unique hues and hue
uniformity[J]. Color Research
&
Application, 2011,
36(5): 316-323.
Research on Color Vision Tool Design Based on Detection Algorithms
25
