
BLDC Motor Control For EVs Using Cuckoo Search Algorithm In PI
Controller Tunning
Arul P
1 a
, Ananda M.H
2 b
, Dhamodharan Selvaraj
2 c
and Dhanalakshmi R
3 d
1
Electrical and Electronics Engineering Department, Kongunadu College of Engineering and Technology , Tamil Nadu,
India.
2
School of Electrical and Electronics Engineering, REVA University, India
3
Department of Electrical and Electronics Engineering, Dayananda sagar college of engineering, Bangalore, India
Keywords: CSA, PI tuning, EV, BLDC motor
Abstract: electric vehicles (EV) are the present and future technology to overcome the environment problems created
by the traditional fossil fuel-based engines. Compact, high torque machines are needed for changing the future
of vehicles. The Brushless DC Motors (BLDC) are ones which satisfies the requirement. The BLDC motor
speed control is creating more importance in EV industry as it is used in many applications now-a-days.
Optimal control of BLDC motor is much need to make the EV more efficient and less consuming ones. DTC
control has a PI controller to produce proportional torque reference. If the PI controller parameters like K
P
and K
i
values are changed arbitrarily the torque ripple and settling time of speed are changing. So, there is
numerous combinations of K
p
and K
i
parameters are available. In this paper the problem is defined with multi-
objective. Identification of Kp and Ki parameters is done by minimizing toque ripple and settling time. The
objective function is solved by cuckoo search algorithm and results are discussed and compared with manual
tuning of PI controller, PSO based PI tuning and CSA based tuning.
1 INTRODUCTION
Many concepts are discussing about torque ripple
minimization of Direct Torque Control (DTC) of
Brushless DC Motor (BLDC) by changing the
switching pattern of pulse width. In 2004, ripple in
the torque is identified due to BLDC motor power
circuit commutation (Song & Choy, 2004). In 2005
torque ripple is reduced due to implementation of
space vector change (Liu et al., 2005). In 2010 stator
current improvement and torque ripple reduction is
implemented using model predictive control (Li &
Cheng, 2010). In 2015, by implementing DTC control
to BLDC motor torque ripple is reduced (Mahalingam
& Ramji, 2022). In 2012, a new PWM scheme is
proposed to eliminated the torque ripple caused due
to commutation by using the non-ideal back EMF
(Devi et al., 2017) is implemented. Using
multilevel inverter and a current controller an attempt
a
https://orcid.org/0000-0002-5927-6023
b
https://orcid.org/0000-0001-6026-3708
c
https://orcid.org/0000-0001-5946-2427
d
https://orcid.org/0000-0002-3317-6673
made to minimize the torque ripple (Mahalingam &
Ramji, 2022) In 2017 repetitivecontrol is used to
minimize the torque ripple (Devi et al., 2017) and by
using adaptive input-output feedback linearization
also a literature is proposed (Fang et al., 2012)
Speed response improvement of BLDC motor
is made in many attempts. In 2016, fuzzy PID
controller is used to improve the speed response
(Varshney et al., 2017). And with only fuzzy
implementation also done for improving speed
response (Geetha & Thangavel, 2016)
Fig. 1 presents an idea for the control of speed
in electric vehicles. The direct torque control (DTC),
which was initially created for the control of
induction motor drives in which direct control of flux
and electromagnetic torque was attempted, evolved as
a solution to these challenges. DTC was initially
developed for the control of induction motor drives.
It made use of the estimated flux and electromagnetic
torque to determine optimal inverter switching, which
enabled it to acquire quick response times. Because
of the non-sinusoidal back-EMF, the DTC of a BLDC
motor is different from that of an induction motor and
80
P, A., M H, A., Selvaraj, D. and R, D.
BLDC Motor Control For EVs Using Cuckoo Search Algorithm In PI Controller Tunning.
DOI: 10.5220/0012508600003808
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Intelligent and Sustainable Power and Energy Systems (ISPES 2023), pages 80-83
ISBN: 978-989-758-689-7
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
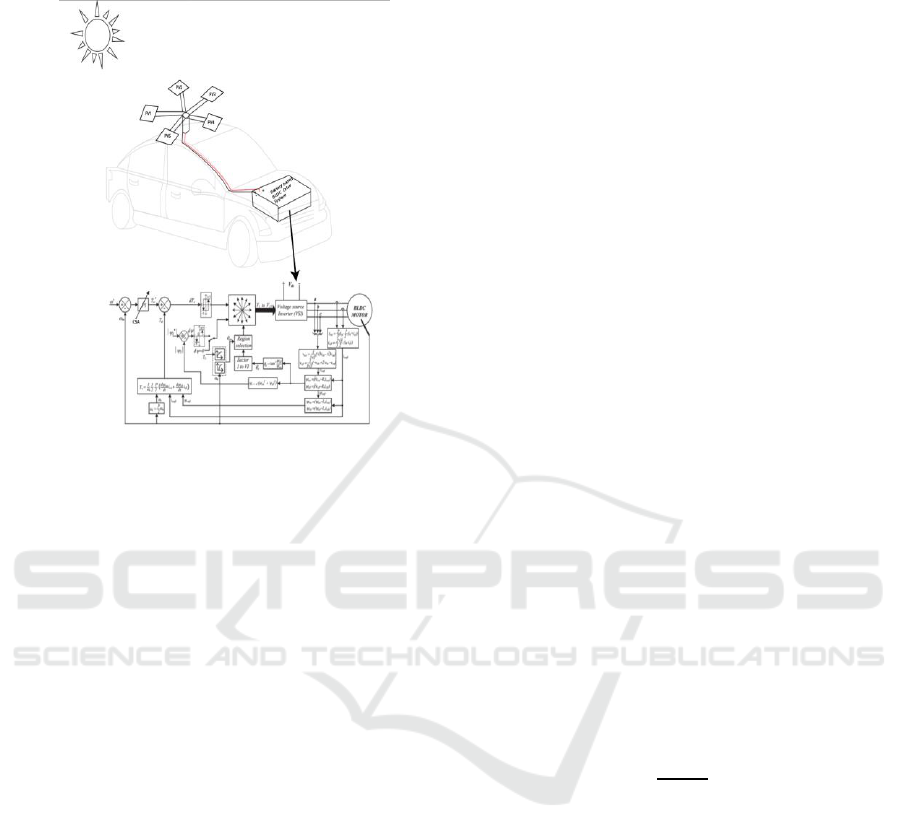
a PMSM motor. In order to lessen the effects of
torque ripple, the hybrid conduction mode was
Figure.1 Proposed Block Diagram of the System.
developed on the basis of the features of BLDC. It is
essential that the estimated torque be correct in order
to achieve direct control of the torque. In this article,
we will discuss the direct self-controlled approach for
BLDC that makes use of stator flux linkage reference
with three phase conduction. The rounding effect in
phase back-EMF is one of the causes for the creation
of torque ripple, and the back-EMF is derived by
making use of shape functions in order to estimate
torque.
The hybrid PSO-IC algorithm for grid
connected PV power system with EV battery is
introduced for charging the EV vehicle (Ahmed et al.,
2020). And for roof top photovoltaic controlled with
new hybrid optimization technique also proposed for
battery charging purposes (Selvaraj & Rangasamy,
2022),.
This paper made an attempt to reduce the
torque ripple and minimization of speed settling time.
Multi-objective problem is formulated in this paper
and the PI controller output is controlled by changing
the K
p
and K
i
parameter. Here cuckoo search
algorithm is used to compare the performance after
and before optimization.
2 PROBLEM IDENTIFICATION
In order to manage the torque that the motor
produces, the DTC control utilizes a speed control
loop that is equipped with a PI controller. This loop
produces a proportional torque value that is used as
an electromagnetic torque reference. It can be
understood by considering the following:
(1)
When applied to PI controller it can be defined as
(2)
Therefore, the outcomes of the torque
measurements are entirely dependent on the Kp and
Ki values that the PI controller uses. The ripples in
the torque can be adjusted by making adjustments to
the values of the PI controller. Therefore, it is
formulated as an equation for discrete optimization,
with settling time functioning as an additional target.
Therefore, the problem is stated as the minimizing of
torque and settling time of speed of the DTC control,
and this is accomplished by taking into consideration
an arbitrary limit for the values of Kp and Ki.
3 OBJECTIVE FUNCTION
Torque ripple is a key factor that can easily be
the cause of vibration in permanent magnet motors as
well as mechanical noise. Torque ripple has a
negative impact on the control precision of BLDC
speed control systems since it is a big factor. The
dependability of the motor may be jeopardized as a
direct outcome of the situation, particularly in the
event that the issue is severe. Continuous application
of the motor torque is required in virtually every
circumstance. Suppressing ripple in the torque output
is a necessary step in the development of a high-
precision permanent magnet motor, which is why this
step is included in the design process. The oscillations
in the motor's torque, as well as the amount of time it
takes for those oscillations to settle, are shown as,
Constraints:
….(4)
BLDC Motor Control For EVs Using Cuckoo Search Algorithm In PI Controller Tunning
81

4 CUCKOO SEARCH ALGORITHM
BASED PI TUNING
Xin-She Yang is responsible for the
development of the mathematical model of the
cuckoo algorithm (CS). There is a class of algorithms
known as "nature inspired algorithms," and the
cuckoo method is a member of that class. The
approach was devised as a result of the observation of
the cuckoo's mating behavior, which served as its
inspiration.
Here the host nests are the Kp and Ki
parameters. The objective is the torque ripple and
speed settling time.
Procedure of CSA is given below
Step 1. Initialize N host nests (K
P
& K
i
) Xi (i=
1, 2,..n) and maximum number of iteration.
Step 2. (minimization of eq(3)) or cost
function (Fi) is evaluated. Cuckoo is selected random
basis with levy flights algorithm.
Step 3. Choose a nest among N nests and name
it as (j).
Step 4. Check old solution is less than new one
and replace j by new solution.
Step 5. Best nest(solutions) are saved.
Step 6. Rank the solutions and find the current
best.
Step 7. Do this for all the iterations
Step 8. Display the results.
Figure.2 Cuckoo search algorithm convergence graph
Figure.3 Speed graph of PSO-PI, CSA-PI and manual tuned
PI controller (PSO settling time is .12 sec; CSA settling
time is 0.0454sec; PI setting time is .25 sec)
Figure.4 Error torque of PSO-PI, CSA-PI and Manual tuned
PI controller (PSO-PI maximum torque ripple is 68 Nm;
CSA-PI maximum torque ripple is 35Nm; PI maximum
torque ripple is 68Nm)
Figure.5 Flux wave of PSO-PI, CSA-PI and manual tuned
PI (saffron is PI controller and blue is CSA-PI – where
saffron is visible and Blue is less visible)
5 DISCUSSIONS
Fig.2 shows the Cuckoo search algorithm
convergence graph where the fitness function is
reducing n every iteration. Fig.3 shows Speed graph
of PSO-PI, CSA-PI and manual tuned PI controller.
Here PSO settling time reaches 0.12 sec. CSA settling
time is 0.0454sec; PI setting time is .25 sec. Fig.4
shows Torque of PSO-PI, CSA-PI and Manual tuned
PI controller. Here PSO-PI maximum torque ripple is
65 Nm. CSA-PI maximum torque ripple is 35Nm; PI
maximum torque ripple is 68Nm. Fig.5 shows Flux
wave of PSO-PI, CSA-PI and manual tuned PI. Here
ISPES 2023 - International Conference on Intelligent and Sustainable Power and Energy Systems
82

also saffron is PI controller and blue is CSA-PI –
where yellow is visible and Blue (PI) magenta (PSO-
PI) is less visible. The identified in PSO is Kp=18 and
Ki = 49. CSA is K
p
= 2 and K
i
= 17.
Table 2: Comparison table
Torque
Ripple in Nm
Setting time
in sec
PSO-PI
65
0.12
CSA-PI
35
0.0454
Manual
tuning of PI
68
0.25
% of
improved
48.52
81.84
Table 2: BLDC motor parameters
6 CONCLUSIONS
The BLDC motor is modeled and the DTC control is
applied to control the speed and torque. Then the PI
controller parameters like K
P
and K
i
are optimized by
multi-objective for minimization of torque ripple and
settling time. Solution algorithm proves the better
results. It is tabulated in table I. The CSA based PI
controller performs better in both speed settling time
and torque ripple minimization.
REFERENCES
Ahmed, C. C., Cherkaoui, M., & Mokhlis, M. (2020).
PSO-SMC controller based GMPPT technique
for photovoltaic panel under partial shading
effect. International Journal of Intelligent
Engineering and Systems, 13(2).
https://doi.org/10.22266/ijies2020.0430.30
Devi, K. S., Dhanasekaran, R., & Muthulakshmi, S.
(2017). Improvement of speed control
performance in BLDC motor using fuzzy PID
controller. Proceedings of 2016 International
Conference on Advanced Communication
Control and Computing Technologies,
ICACCCT 2016.
https://doi.org/10.1109/ICACCCT.2016.78316
66
Fang, J., Li, H., & Han, B. (2012). Torque ripple
reduction in BLDC torque motor with nonideal
back EMF. IEEE Transactions on Power
Electronics, 27(11).
https://doi.org/10.1109/TPEL.2011.2176143
GeethaV & Thangavel, S. (2016). Performance
analysis of direct torque-controlled BLDC
motor using fuzzy logic. International Journal
of Power Electronics and Drive Systems, 7(1).
https://doi.org/10.11591/ijpeds.v7.i1.pp144-
151
Li, Z., & Cheng, S. (2010). Torque ripple reduction
in brushless DC motors based on model
predictive control. Proceedings - International
Conference on Electrical and Control
Engineering, ICECE 2010.
https://doi.org/10.1109/iCECE.2010.1095
Liu, Y., Zhu, Z. Q., & Howe, D. (2005). Direct torque
control of brushless DC drives with reduced
torque ripple. IEEE Transactions on Industry
Applications, 41(2).
https://doi.org/10.1109/TIA.2005.844853
Mahalingam, K., & Ramji, N. K. C. (2022). A
comparative analysis of torque ripple reduction
techniques for sensor BLDC drive.
International Journal of Power Electronics and
Drive Systems, 13(1).
https://doi.org/10.11591/ijpeds.v13.i1.pp122-
131
Selvaraj, D., & Rangasamy, D. (2022). Electric
vehicle charging using roof top photovoltaic
controlled with new hybrid optimization
technique. Indonesian Journal of Electrical
Engineering and Computer Science, 26(3).
https://doi.org/10.11591/ijeecs.v26.i3.pp1227-
1234
Song, J. H., & Choy, I. (2004). Commutation torque
ripple reduction in brushless DC motor drives
using a single DC current sensor. IEEE
Transactions on Power Electronics, 19(2).
https://doi.org/10.1109/TPEL.2003.823177
Varshney, A., Gupta, D., & Dwivedi, B. (2017).
Speed response of brushless DC motor using
fuzzy PID controller under varying load
condition. Journal of Electrical Systems and
Information Technology, 4(2).
https://doi.org/10.1016/j.jesit.2016.12.014
BLDC Motor Control For EVs Using Cuckoo Search Algorithm In PI Controller Tunning
83
