
CONTROL THROUGH STATE CONVERGENCE OF
TELEOPERATION SYSTEMS WITH VARYING TIME DELAY
Jos
´
e M. Azor
´
ın, Oscar Reinoso, Jos
´
e M. Sabater
Dpto. de Ingenier
´
ıa de Sistemas Industriales, Universidad Miguel Hern
´
andez
Avenida de la Universidad s/n, Elche (Alicante), 03202 Spain
Rafael Aracil
DISAM, ETSII, Universidad Polit
´
ecnica de Madrid
C/Jos
´
e Guti
´
errez Abascal 2, Madrid, 28006 Spain
Keywords:
Teleoperation, control system, time delay, state space.
Abstract:
Teleoperation systems that use Internet as communication channel must deal with varying time delays. In
these situations, the system can become unstable due to the irregular variations of the time delay. In this
paper, a control method of teleoperation systems that we presented considering constant time delays is applied
to control a teleoperation system with varying time delays. The control gains obtained with a constant time
delay can be used to control the teleoperation system with varying time delays because of the control method
robustness. Experimental results are presented to illustrate the validity of the method.
1 INTRODUCTION
In a teleoperation system, the human operator con-
trols the master manipulator to achieve that the slave
manipulator performs a remote task. In a bilateral sys-
tem, to improve the task performance, the interaction
force of the slave with the environment is reflected to
the operator. The existence of time delays in the infor-
mation transmission between the local and remote en-
vironment can destabilize bilateral teleoperation sys-
tems.
In traditional teleoperation systems, private trans-
mission media are used to perform the master – slave
communication. In these cases, a constant time delay
is assumable. Different teleoperation control systems
can be found in the literature to overcome the constant
time delay problem (Arcara and Melchiorri, 2002).
The evolution of computer networks, as Internet,
has powered to consider this media as communica-
tion channel in teleoperation systems. However, in
this media the communication time delay is not con-
stant, but it varies depending of the network traffic.
It is possible that bilateral control systems designed
considering a constant time delay would be destabi-
lized when varying time delays appear (Kosuge et al.,
1996). Several control systems have been proposed
in teleoperation with varying time delay: (Kosuge
et al., 1996), (Oboe and Fiorini, 1997), (Chopra et al.,
2003), etc.
In (Azor
´
ın et al., 2003a) we have proposed a new
design and control method of bilateral systems with
constant time delay. This method allows that the slave
manipulator follows the master in spite of the time
delay by means of the state convergence between the
master and the slave. The method is able also to es-
tablish the desired dynamics of this convergence and
the dynamics of the slave manipulator. In this paper,
the control method through state convergence is used
when varying time delays exist in the communication
channel. A constant time delay is considered to ob-
tain the control gains of the system. However these
control gains are applied to control the system when
there are varying time delays. Experimental results
show the validity of the method.
The paper is organized as follows. Section 2 de-
scribes the design and control method of the teleoper-
ation system considering a constant time delay. The
experiments carried out with this control method with
varying time delays are presented in Section 3. Fi-
nally, Section 4 summarizes the conclusions of the
paper.
2 DESIGN AND CONTROL
METHOD OF THE
TELEOPERATION SYSTEM
In this section the modelling of the teleoperation sys-
tem and the control method considering a constant
379
M. Azouın J., Reinoso O., M. Sabater J. and Aracil R. (2004).
CONTROL THROUGH STATE CONVERGENCE OF TELEOPERATION SYSTEMS WITH VARYING TIME DELAY.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 379-382
DOI: 10.5220/0001125603790382
Copyright
c
SciTePress
time delay is summarized. For more details see
(Azor
´
ın et al., 2003a). The teleoperation system with
time delay has been modelled in the state space and
it has been controlled through state convergence. The
control method allows that the slave follows the mas-
ter in spite of time delay. Also it allows to establish
the dynamics of the slave and the dynamics of the
master - slave error.
2.1 Modelling of the Teleoperation
System
The teleoperation system has been modelled in the
state space. It has been considered a simplified linear
model of one dof for the master and the slave. The
representation in the state space of the master select-
ing as state variables the position (x
1
(t)=θ(t)) and
the velocity (x
2
(t)=
˙
θ(t)) is:
˙x
m1
(t)
˙x
m2
(t)
=
01
0 −
b
m
J
m
x
m1
(t)
x
m2
(t)
+
+
0
1
J
m
u
m
(t) (1)
y
m
(t)=[
10
]
x
m1
(t)
x
m2
(t)
(2)
where J
m
and b
m
are, respectively, the inertia and the
viscous friction coefficient of the master. The repre-
sentation of the slave is analogous.
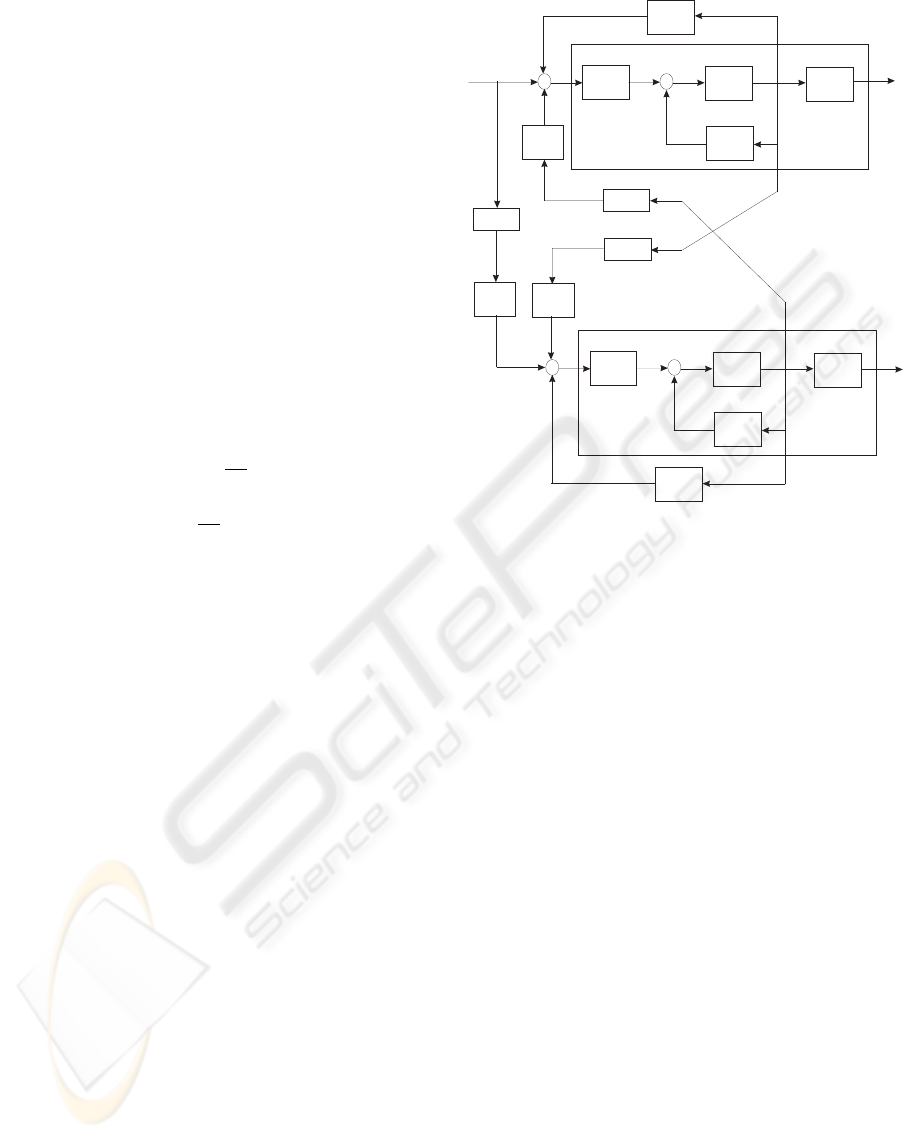
All possible interactions that could appear in
the operator-master-slave-environment set have been
considered, see Figure 1, where:
• A
m
, B
m
and C
m
are the matrices that model the
master.
• A
s
, B
s
and C
s
are the matrices that model the
slave.
• F
m
represents the force that the operator applies in
the master.
• u
m
and u
s
are, respectively, the master and the
slave control signals.
• R
m
=[
r
m1
r
m2
] allows modelling the force
reflection to the master.
• G
2
= g
2
, R
s
=[
r
s1
r
s2
], K
m
=
[
k
m1
k
m2
], and K
s
=[
k
s1
k
s2
] are con-
trol gains to obtain.
• Delay represents a constant time delay of T sec-
onds.
The structure of the matrix K
s
to incorporate the
interaction of the slave with the environment in the
modelling must be:
K
s
=
´
k
s1
− k
e
´
k
s2
− b
e
(3)
B
m
A
m
ò
C
m
K
m
R
m
+
+
+
+
+
MASTER
x
m
y
m
F
m
u
m
B
s
A
s
ò
C
s
K
s
R
s
+
+
+
+
+
SLAVE
x
s
u
s
y
s
G
2
Delay
Delay
Delay
Figure 1: Modelling of the teleoperation system with time
delay.
where k
e
and b
e
are, respectively, the stiffness and the
viscous friction of the environment. In this way the
reaction force of the slave with the environment,
f
s
(t)=k
e
θ
s
(t)+b
e
˙
θ
s
(t) (4)
will oppose to the slave control signal. To consider
force feedback from the slave to the master, the struc-
ture of the matrix R
m
must be:
R
m
=[
r
m1
r
m2
]=[
k
f
k
e
k
f
b
e
] (5)
where k
f
is the force feedback gain.
2.2 Control Method through State
Convergence
From the model shown in Figure 1, it could be ob-
served that the master control signal, u
m
(t), and the
slave control signal, u
s
(t), are respectively:
u
m
(t)=K
m
x
m
(t)+R
m
x
s
(t − T )+F
m
(t) (6)
u
s
(t)=K
s
x
s
(t)+R
s
x
m
(t−T )+G
2
F
m
(t−T ) (7)
Considering that the characteristic polynomial
wished of the slave and the error would be, respec-
tively, p(s)=s
2
+p
1
s+p
0
and q(s)=s
2
+q
1
s+q
0
,
the control parameters are obtained solving the fol-
lowing equations system:
J
m
g
2
− Tr
s2
− J
s
+ Tg
2
r
m2
=0 (8)
ICINCO 2004 - ROBOTICS AND AUTOMATION
380

J
m
k
s1
− Tr
m1
r
s2
− J
s
r
m1
+ Tr
m2
k
s1
+
+J
m
r
s1
− Tr
s2
k
m1
+ Tr
m2
r
s1
=0 (9)
T
2
r
s2
r
m1
+ J
m
(k
s2
− b
s
) − Tr
s2
r
m2
−
−J
s
r
m2
+ J
s
Tr
m1
+ Tr
m2
(k
s2
− b
s
)+
+J
m
(r
s2
− Tr
s1
) − Tr
s2
(k
m2
− b
m
) − (10)
−T
2
r
m2
r
s1
− J
s
(k
m2
− b
m
)+Tr
m2
rs2=0
J
m
k
s1
− Tr
m1
r
s2
+ J
m
r
s1
− Tr
s2
k
m1
J
s
J
m
− T
2
r
s2
r
m2
= −p
0
(11)
n
p
J
s
J
m
− T
2
r
s2
r
m2
= −p
1
(12)
J
s
k
m1
− Tr
m2
r
s1
− J
m
r
s1
+ Tr
s2
k
m1
J
s
J
m
− T
2
r
s2
r
m2
= −q
0
(13)
n
q
J
s
J
m
− T
2
r
s2
r
m2
= −q
1
(14)
where:
n
p
= T
2
r
s2
r
m1
+ J
m
(k
s2
− b
s
) − Tr
m2
r
s2
+
+J
m
(r
s2
− Tr
s1
) − Tr
s2
(k
m2
− b
m
) (15)
n
q
= T
2
r
m2
r
s1
+ J
s
(k
m2
− b
m
) − Tr
m2
r
s2
−
−J
m
(r
s2
− Tr
s1
)+Tr
s2
(k
m2
− b
m
) (16)
Therefore to obtain the control gains of the tele-
operation system shown in Figure 1 only these seven
equations must be solved.
2.3 Varying Time Delays
The control method presented in this section consid-
ers a constant time delay in the communication chan-
nel. This control method is robust to the uncertainty
of the design time delay (Azor
´
ın et al., 2003b). So the
control method allows successfully to control the tele-
operation system in spite of that the communication
time delay would be different to the design time delay.
When there are varying time delays, the communica-
tion time delay in each moment can be different of
the design time delay. However, the control gains ob-
tained considering a constant time delay can be used
to control the teleoperation system when varying time
delays appear because of the control method robust-
ness.
3 EXPERIMENTAL RESULTS
We have tested the control method with varying time
delays using the experimental platform shown in Fig-
ure 2. This platform consists of a master and a slave
of one dof. Both manipulators are driven by Pre-
motec brushless DC motors. These motors provide
Figure 2: Experimental teleoperation system of one dof.
the joint velocities using tachometers. The joint an-
gles are detected by Spectrol potentiometers. The
controller has been implemented on the computer us-
ing the Matlab/Simulink real time toolbox. A sim-
ple time of 0.01s has been used. The I/O interface
utilized between the controller and the experimental
platform has been a National Instruments 6024E card.
To simulate that Internet is used as transmission chan-
nel between the local and remote environment, a ran-
dom time delay lesser than 1 s has been generated in
the communication between the master and the slave.
However, a constant time delay of 0.1 s has been con-
sidered to design the control system.
It has been explained previously that the slave is
driven by a brushless DC motor. In this case the slave
torque is proportional to the current intensity of the
motor armature. So the contact force of the slave
with the environment (f
s
(t)) can be obtained from the
slave motor intensity.
To calculate the slave control signal it is necessary
to know the operator force applied over the master
(F
m
(t)). In the experimental setup there is not any
force sensor. For this reason the operator force has
been calculated as a spring force:
F
m
(t)=k
op
θ
m
(t) (17)
where k
op
= 100Nm/rad.
The experiment performed consists of guiding the
slave against a sponge until that the slave can not ad-
vance more due to the environment reaction force.
The parameters that model this environment are: k
e
=
20Nm/rad and b
e
=0Nm/(rad/s).
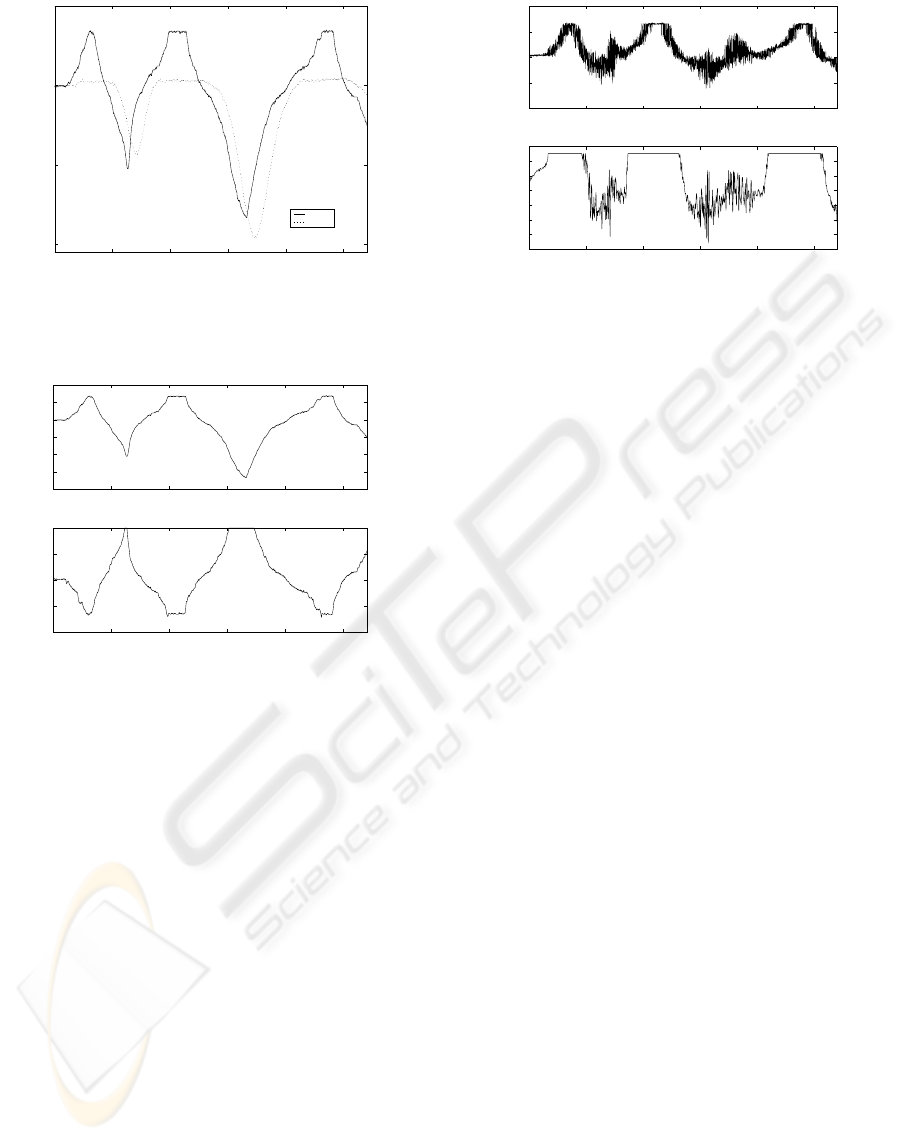
Figure 3 shows the position of the teleoperation
system when varying time delays exist. It can be ob-
served that the slave follows the master in spite of the
time delays until that the slave can not advance be-
cause of the interaction with the environment.
CONTROL THROUGH STATE CONVERGENCE OF TELEOPERATION SYSTEMS WITH VARYING TIME DELAY
381
0 5 10 15 20 25
−0.2
−0.1
0
0.1
time (s)
position
master
slave
Figure 3: Master and slave position obtained experimen-
tally.
0 5 10 15 20 25
−20
−15
−10
−5
0
5
10
time (s)
F
m
(V)
0 5 10 15 20 25
−10
−5
0
5
10
u
m
(V)
time (s)
Figure 4: Operator force (top part) and master control signal
(bottom part).
In Figure 4 the operator force (top part) and the
master control signal (bottom part) are shown. It can
be observed that the master control signal opposites
the operator force. In this way the operator feels the
force exerted by the slave in the remote environment,
and the slave advance is stopped.
Figure 5 shows the slave control signal (top part)
and the force reaction of the slave with the envi-
ronment (bottom part). In this figure it can be ob-
served that as a bigger control action is applied over
the slave, bigger values of the reaction force are pro-
duced. These values correspond to the instants when
the slave can not advance more due to the environ-
ment opposition, and the operator continues applying
its force over the master to achieve the slave advance.
As it has been shown in this section, the control
method through state convergence can be used when
varying time delays exist in the communication chan-
nel in spite of considering a constant time delay to
obtain the control gains.
0 5 10 15 20 25
−10
−5
0
5
10
time (s)
u
s
(V)
0 5 10 15 20 25
−0.1
−0.05
0
0.05
0.1
0.15
time (s)
f
s
(V)
Figure 5: Slave control signal (top part) and reaction force
of the slave with the environment (bottom part).
4 CONCLUSION
In this paper, a design and control method that we
presented to control teleoperation systems with con-
stant time delays is used to control teleoperation sys-
tems with varying time delays. To obtain the control
gains a constant time delay is considered. However
these control gains can be used when varying time
delays appear due to the control method robustness.
The control method has been verified experimentally
in a teleoperation system of one dof. Our future work
will be to study the asymptotic stability of the system
when there are varying time delays.
REFERENCES
Arcara, P. and Melchiorri, C. (2002). Control schemes for
teleoperation with time delay: A comparative study.
Robotics and Autonomous Systems, 38:49–64.
Azor
´
ın, J. M., Reinoso, O., Sabater, J. M., and Aracil, R.
(2003a). A new control method of teleoperators with
time delay. In The 11
th
International Conference on
Advanced Robotics (ICAR 2003).
Azor
´
ın, J. M., Reinoso, O., Sabater, J. M., Neco, R. P., and
Aracil, R. (2003b). Dynamic analysis for a teleopera-
tion system with time delay. In IEEE Control Confer-
ence on Applications (CCA 2003).
Chopra, N., Spong, M. W., Hirche, S., and Buss, M. (2003).
Bilateral teleoperation over the internet: the time vary-
ing delay problem. In American Control Conference
(ACC 2003), pages 155–160.
Kosuge, K., Murayama, H., and Takeo, K. (1996). Bi-
lateral feedback control of telemanipulators via com-
puter network. In IEEE International Conference on
Intelligent Robots and Systems, pages 1380–1385.
Oboe, R. and Fiorini, P. (1997). A design and control envi-
ronment for internet-based telerobotics. International
Journal of Robotics Research.
ICINCO 2004 - ROBOTICS AND AUTOMATION
382
