
FUZZY CONTROLLER DESIGN FOR A THREE JOINT ROBOT
LEG IN PROTRACTION PHASE
*
An optimal behavior inspired fuzzy controller design
Mustafa Suphi Erden, Kemal Leblebicioğlu
Department of Electrical & Electronics Engineering, Computer Vision and Intelligent Systems Research Laboratory,
Middle East Technical University, 06531 Ankara, Turkey
Keywords: Robot leg, fuzzy controller, optimal control.
Abstract: A fuzzy controller design is performed for a three joint robot leg in protraction phase. The aim is to develop
a controller to carry the tip point to any given destination. The design is based on the inspirations derived
from optimal behaviors of the leg. The optimal trajectories are obtained by using optimization methods
utilizing “numerical gradient” and “optimal control” successively. Separate fuzzy controllers are designed
for each actuator. In writing the rules each actuator is considered to be an independent agent of the leg
system. The protraction motion is divided into two epochs. For each epoch different controller systems are
designed to switch from one to the other in between.
1 INTRODUCTION
The aim in this study is to design a fuzzy controller
system, which will carry a three joint robot leg from
any initial position to any commanded position in a
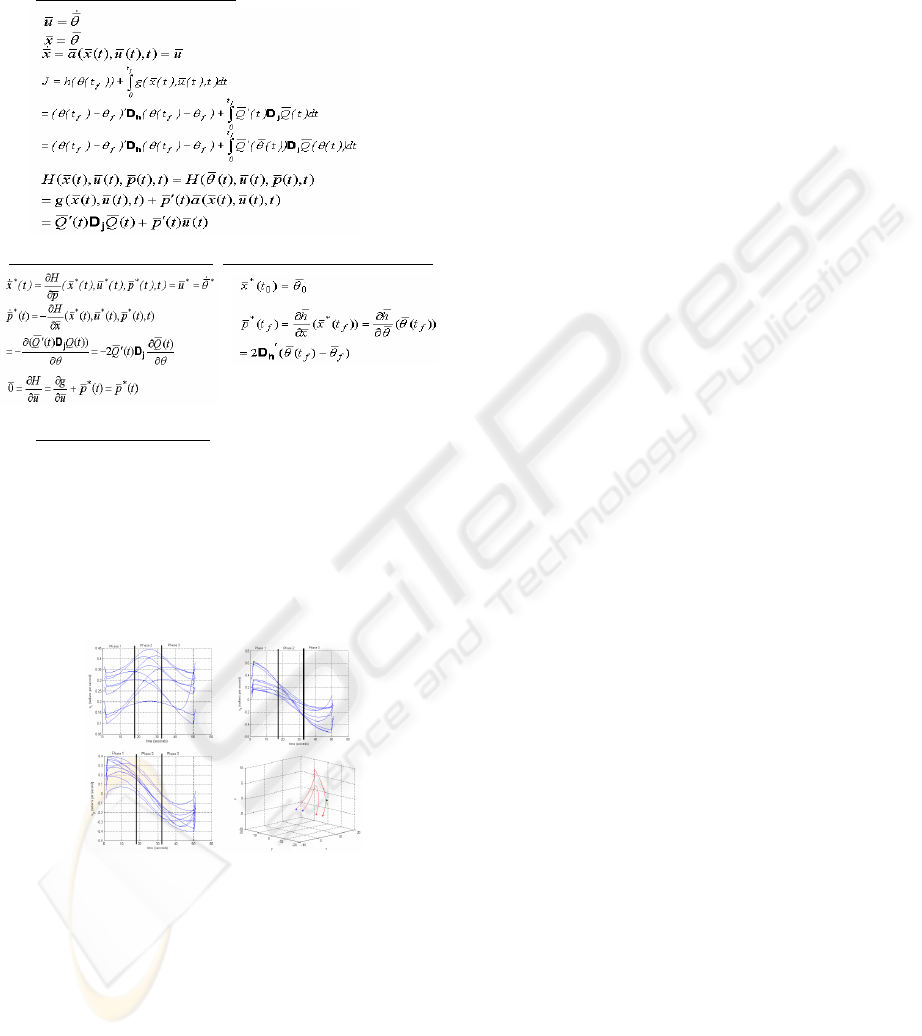
protraction phase. In Fig.1 a schematic
representation of a three joint robot leg is given. A
three joint robot leg can be considered as a three
joint robot manipulator. Eq.1 relates the tip point
position to the three joint angles. In this equation
)(
)(
θ
b
e
P
, represents the position of the tip point with
respect to the body frame, when the joint angles take
the values in the
θ
vector. The variables in the form
of a
i
represent the length of the ith link. The
variables in the form of
θ
ij
mean the sum of the ith
and jth joint angles (
θ
ij
=
θ
i
+
θ
j
). The variables in the
form of c
i
are not shown in the figure but exist in the
equation. (-c
i
,0,0) represents the position of the
center of gravity of the ith link with respect to the ith
coordinate frame. Namely, the term (a
i
-c
i
) designates
the distance of the center of gravity of the ith link
from the ith joint.
In order to calculate the energy dissipated in
actuators during a protraction phase, one needs to
calculate the joint torques throughout the movement.
* This research is supported by the research fund
of Middle East Technical University as a scientific
research project: BAP – 2002 – 03 – 01 – 06.
If the motion is slow, the inertial related forces
due to acceleration, Coriolis and centrifugal effects
can be neglected and the torque can be calculated as
resulting only by the gravitational forces. Namely, if
the motion is slow, the result of a static analysis of
torques can be substituted for the dynamic analysis.
This means that the torques are equal in amount and
direction to compensate the gravitational force on
the leg. In Eq.2, the torque vector (Q
1
, Q
2
, Q
3
) for a
position represented by the
θ
vector is given. The
m
1
, m
2
, m
3
values in this equation correspond to the
link masses, and g is the gravitational acceleration.
(1)
(2)
Figure 1: A three joint leg diagram with coordinate
frames attached to the links.
302
Suphi Erden M. and Leblebicio
˘
glu K. (2004).
FUZZY CONTROLLER DESIGN FOR A THREE JOINT ROBOT LEG IN PROTRACTION PHASE - An optimal behavior inspired fuzzy controller design.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 302-306
DOI: 10.5220/0001132503020306
Copyright
c
SciTePress
In robotic applications it is common to use the
sum of squares of joint torques as a criteria of
dissipated energy (Bobrow et al., 2001; Liu et al.,
2000). Following this approach, Eq.3 will be utilized
as a criterion of dissipated energy in this study. The
input of the three joint leg system for a protraction
movement is the trace of joint velocities throughout
the protraction period. This period is taken to be 5
seconds in this work. The input vector at a time
instant can be represented as in Eq.4.
2 TRAJECTORY OPTIMIZATION
The energy optimization problem for the protraction
movement of three joint leg can be stated as to find
the optimal
)(tu trajectory to minimize Eq.3 from
the initial to the final time with given initial and
final tip point positions. This problem is a typical
“optimal control” problem, which is trivial to
formulate and solve (see, e.g. Kirk, 1970). However,
the solution of this optimal control problem is very
much dependent on the initial trajectory used at the
start. If the initial trajectory is not feasible, it is very
probable that the resultant trajectory will also not be
feasible. Therefore, the optimal control technique
needs a feasible initial trajectory. In order to
generate this initial trajectory a method using
“numerical gradient”, in which feasibility is imposed
by penalty functions, is used. The output trajectories
of this method were pretty good. The optimal control
method then is used to tune the trajectories slightly
around the trajectories found by the initial method.
In the method based on the numerical gradient
the conventional method of “steepest descent” is
utilized after the problem is discretized. The total
duration is divided into 50 equal durations, and the
starts of durations are signified as the 50 time
instants (denoted by n). The actuators are assigned a
velocity at each instant and this velocity is held
constant in the sub-period starting with that instant.
In this way, the movement of an actuator is
accomplished by 50 velocity values throughout the
protraction period of 5 seconds. Since there are three
actuators, the input vector which makes the system
to accomplish a whole protraction is a 50
×
3 long
vector ( ). The initial and final tip point positions
are constant. Therefore the required joint angles for
initial and final positions are given. Initial input,
namely initial trajectory of joint velocities, is taken
as the average velocity that would take the tip point
from the initial position to the final. The cost
function is constructed by summing up the following
four penalty functions. Eq.5 is the penalty related
with the sum of torque squares. Eq.6 is the penalty
to avoid the tip point of the leg to go under the
ground (ground level is –5). Eq.7 is the penalty
function related with the joint angle limits. The last
penalty in Eq.8 is related with the required final
condition of angles. If the final angles are not equal
to the required values this term becomes positive.
The overall cost function (Eq.9) is a weighted
sum of these four penalties. The values of these
weights are taken as follows: T=1; U=200; R=0.01;
F=1000. These values are arranged by trial and error
in order to make the four costs comparable and to
force the algorithm to generate some feasible
solution. According to the steepest descent
algorithm, the gradient of the cost function with
respect to the input vector is found and the input
vector is iterated in the opposite direction of the
gradient. The value of
α
in Eq.10 is determined by a
one-dimensional search in each iteration.
In order to determine the trajectories with the
optimal control technique, first the Hamiltonian
formulation of the problem should be performed,
and then the differential equations should be
numerically solved. Following the notation in (Kirk,
1970), the Hamiltonian formulation, necessary
conditions and boundary conditions for the three
joint leg problem are given in Eq.9, 10, and 11,
respectively. The first two equations of the
necessary conditions make up two differential
equations whose initial and final conditions are
given respectively by the boundary conditions
equations. Starting with an initial
)(tu trajectory
these equations can be solved numerically. Next the
)(tu trajectory can be updated in the direction to
minimize the third equation of necessary conditions.
After some iteration the optimal
)(
*
tu
trajectory,
which makes the third necessary condition as close
as possible to 0, can be achieved. This technique is
called “the method of steepest descent for two-point
boundary-value problems” (Kirk, 1970). The initial
)(tu trajectory for this technique is taken from the
[
]
n,j
u
FUZZY CONTROLLER DESIGN FOR A THREE JOINT ROBOT LEG IN PROTRACTION PHASE - AN OPTIMAL
BEHAVIOR INSPIRED FUZZY CONTROLLER DESIGN
303
output of the initial method and it is further
improved by the optimal control method.
Hamiltonian formulation
(9)
Necessaryconditions (10)
BoundaryConditions (11)
Optimization Results:
The optimization is performed for nine pairs of
initial and final tip point positions. In Fig.2, the first
three figures respectively show the three joint angle
velocities of the nine results. The fourth figure
shows the tip point trajectories for two of those nine
results. The fuzzy controller design will be
accomplished with the intuitive feeling derived from
these four figures.
3 FUZZY CONTROLLER
In order to get an intuitive feeling of the behavior of
actuators, the optimal velocity trajectories are
separated into three phases (Fig.2, first three
figures), with straight tick lines. The first phase
corresponds to the ascending of the tip point, the
second phase corresponds to the period during
which the tip point is at highest levels, and the third
phase corresponds to the descending of the tip point
towards the destination. These three phases are
possible to be distinguished by the value of the first
actuator angle. Roughly, it can be stated that, the
center of the first phase is the time when the first
joint angle is
π
/4 radians, the center of the second
phase is when the first joint angle is
π
/2 radians,
and the center of the third phase is when the first
joint angle is 3
π
/4 radians. In the first phase the first
angle, which is most effective for furthering the tip
point in the y direction, moves with a rather slow
velocity (Fig.2, first figure). It makes its peak in the
second phase and stays close to that maximum
value. In the third phase the velocity decreases to
lower values gradually. Roughly we can state that,
the first angle moves very slow in the first and third
phases and moves with a constant high velocity in
the second phase. The behaviors of the second and
third angles are very similar (Fig.2, second and third
figures). In the first phase they have positive big
velocities, in the second phase they have small
velocities around zero, and in the third phase they
have negative big velocities. Roughly we can state,
the second and third angles move with constant
positive and negative high velocities in the first and
third phases respectively, and they stay stationary in
the second phase. These intuitive feelings will be
useful in writing the rules for the controller of each
angle.
The whole motion is controlled with two
different controller systems each of which has
different controllers for the three joint angles. The
whole motion can be roughly divided into two
epochs of ascending and descending. The ascending
epoch corresponds to the first phase and first half of
the second phase. The descending epoch
corresponds to the last half of the second phase and
the third phase. The boundary between these two
epochs is roughly the instant at which the first angle
is
π
/2 radians. The first controller will make the tip
point rise according to the behaviors of the angles in
the corresponding phases, and the second controller
will bring the tip point to its destination again
according to the behaviors in the corresponding
phases. Moreover, the second controller has to
satisfy the stability around the destination point at
the end of the second epoch. In fact this is the
crucial point which explains the need of different
controller systems for ascending and descending..
In (Erden et al., 2004) we had developed a multi
agent perspective based fuzzy controller design
paradigm for robot manipulators. The idea there was
Figure 2: Optimal joint angle velocities for nine results
and tip point trajectories for two results
ICINCO 2004 - ROBOTICS AND AUTOMATION
304
to consider every actuator as an independent agent
and to design a fuzzy controller for every actuator.
In designing the fuzzy controller for an agent
(actuator), the infinitesimal movement of the tip
point resulting from the movement of the actuator is
considered. In other words, in constructing the rule
for an agent at any instant, all the other agents
(actuators) are considered to be stationary. The rule
is constructed in a way that the agent will make the
best action in order to make the tip point move in the
desired direction. The same idea is utilized here in
developing the rules for the fuzzy controllers of
actuators in both of the two controller systems.
In the first epoch there are the first and second
phases. These phases will be distinguished by the
value of the first actuator angle. The value S (small)
for the first actuator angle (θ
1
) will correspond to the
first phase and M (medium) will correspond the
second phase. The aim in this epoch is to rise up the
tip point; therefore the second input of the
controllers will be the height information, namely
the z value of the tip point (dz). The exact
membership functions and rule tables will not be
given here due to the lack of space. In the second
epoch the aim is to carry the tip point to its final
position, and to make the tip point stay there in a
stable manner. In order to accomplish these
following steps are performed: (
1) The rules that will
carry the tip point from any initial position to any final
position as if it should follow a straight-line path are
written. (2) The rules that will stop the tip point at the
final position are added.
With these ideas, first a
controller that carries the tip point to any given
destination is designed. Then the stability is satisfied
at the destination point. Without this second step, the
tip point would not have a good steady state
behavior around the final position; it would be
tending to make small circles. With these two steps a
controller which carries the tip point to any
destination and which stops it there is obtained.
In constructing the rules the following three
items are considered:
1.The first actuator will take care of the position
difference in the y direction.
2.The second and third actuators will take care of the
position difference in x and z directions, and they will
behave as if they are in a vertical plane in every instant.
3.The first actuator will take care of the behaviors
associated with the second and third phases. Namely, the
first actuator will be fast in the second phase and slow in
the third phase.
To clarify the idea in the second item here will
be given an example. The input to the second and
third actuators are the angles of the second and third
actuators (state information of the agents) and the
position differences in x and z directions. For the
state information of the second agent (for the second
joint angle, θ
2
) there are three membership
functions: S (small,
π
/4 radians), M (medium,
π
/2
radians), and B (big, 3
π
/4 radians). For the state of
the third agent (θ
3
) the three levels take negative
values: NS (-
π
/4), NM (-
π
/2), and NB (-3
π
/4). The
example here is for the state of θ
2
:M; θ
3
:NS. Fig.3
shows the graphical representation, assuming that
the leg is in a vertical plane. Examining Fig.3, the
following statements can be derived:
1.When θ
2
:M and θ
3
:NS, a positive change in θ
2
will
result in a small negative change in x direction.
2. When θ
2
:M and θ
3
:NS, a positive change in θ
2
will
result in a medium positive change in y direction.
3. When θ
2
:M and θ
3
:NS, a positive change in θ
3
will
result in no change in x direction.
4. When θ
2
:M and θ
3
:NS, a positive change in θ
3
will
result in a big positive change in y direction.
The total amount of action to change the y
position of the tip point will be determined by the
position difference in the y direction between the tip
point and destination. Then this work will be divided
between the agents. In order to change the y
position, agent
2
should take a small portion and
agent
3
should take a bigger portion of workload. The
same logic will apply for the x direction. In order to
change the x position, agent
2
should take full load of
work and agent
3
should not have any contribution.
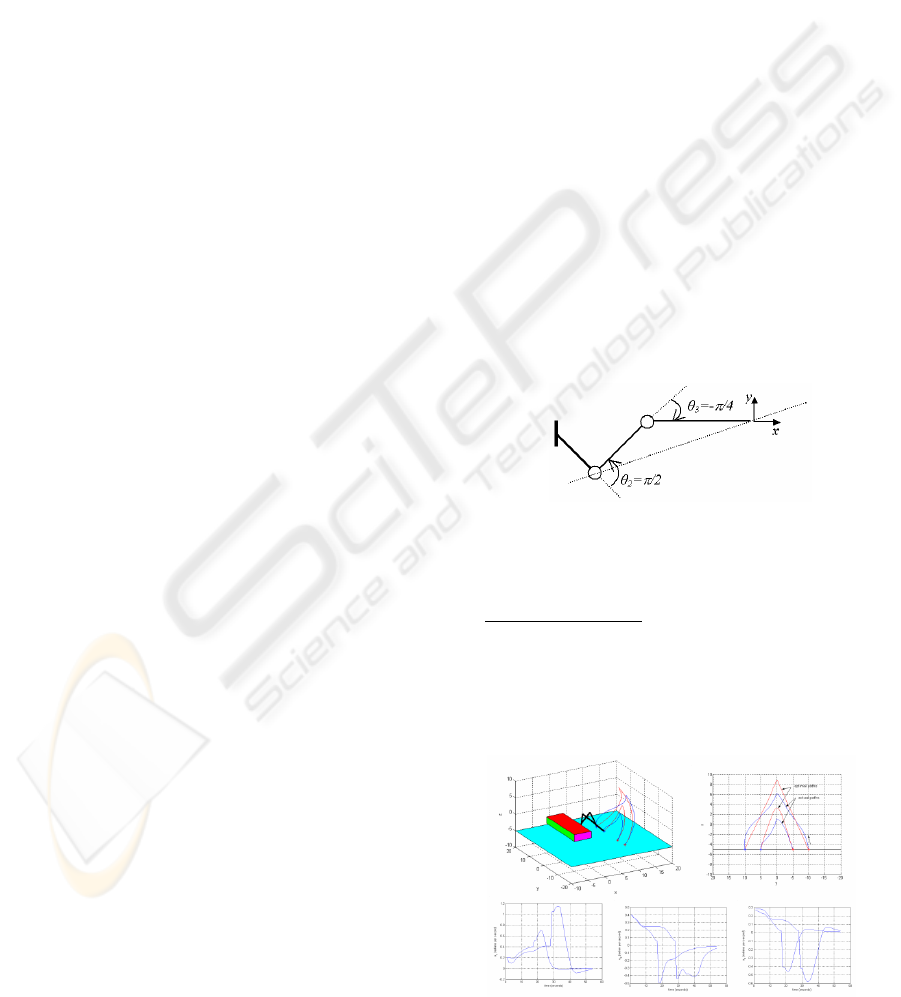
Simulation Results:
In Fig.4 the results obtained using the control
system are shown. As it is seen in the upper two
figures the controller is successful to produce tip
point trajectories ‘resembling’ the optimal ones. The
three figures below show the three joint velocity
trajectories.
Figure 3: Graphical representation of the situation
when θ
2
:M and θ
3
:S.
Figure 4: Simulation results.
FUZZY CONTROLLER DESIGN FOR A THREE JOINT ROBOT LEG IN PROTRACTION PHASE - AN OPTIMAL
BEHAVIOR INSPIRED FUZZY CONTROLLER DESIGN
305

REFERENCES
Bobrow, J.E., Martin, B., Sohl, G., Wang, E.C., Park, F.C,
Kim, K., 2001. Optimal robot motions for physical
criteria, Journal of Robotic Systems, 18(12):785-792.
Erden, M.S., Leblebicioğlu, K. and Halıcı, U., 2004.
Multi-agent system based fuzzy controller design with
genetic tuning for a service mobile manipulator robot
in the hand-over task, Journal of Intelligent and
Robotic Systems, 38: 287-306.
Kirk, Donald E, 1970. Optimal Control Theory – An
Introduction, Prentice-Hall Inc., Englewood Cliffs,
New Jersey.
Liu, J.F., Abdel-Malek, K., 2000. Robust control of planar
dual-arm cooperative manipulators, Robotics and
Computer-Integrated Manufacturing, Vol.16, No. 2-3:
109-120.
ICINCO 2004 - ROBOTICS AND AUTOMATION
306
