
CONFLICT RESOLUTION FOR FREE FLIGHT CONSIDERING
DEGREE OF DANGER AND CONCESSION
Mustafa Suphi Erden, Kemal Leblebicioğlu
Department of Electrical & Electronics Engineering, Computer Vision and Intelligent Systems Research Laboratory,
Middle East Technical University, 06531 Ankara, Turkey
Keywords: Air traffic management, free flight, conflict resolution, fuzzy reasoning.
Abstract: In this study a conflict resolution technique based on danger
and concession considerations is presented for
free flight paradigm. A danger function which assigns a danger value for the conflict situation, and a
concession function which assigns a concession value for the path followed by the aircraft are constructed.
The danger and concession values are input to a fuzzy decision module. This module outputs the amount of
deviation from the optimal path and the conflict is solved following these deviations. The method presented
here is the third method we have been studying regarding to the conflict resolution problem. Its results are
presented with a comparison to our other two studies.
1 INTRODUCTION
The air traffic load whole around the world is
estimated to double in the year 2025 (Perry, 1997).
The increasing demand of airspace due to the
increase in air traffic forces current Air Traffic
Management Systems (ATMS), which are mainly
relying on human, to be replaced with safer and
more efficient intelligent control systems. It is stated
that “Due to the increasing traffic, the workload of
human air traffic controllers will soon be too heavy
to handle and the current centralized ATMS will be
more and more unsafe (estimated one major accident
per week by the year 2015) and also inefficient (5.5
billion dollars lost annually)”, (Sekhavat and Sastry,
1998). In today’s ATMS, the air-traffic controllers
(ATC) take the whole load in both arranging the
paths and solving the conflicts between aircraft
paths. However the increase in the number of flights
makes the system so complicated that it is
impossible for a centralized controller to manage the
control in an efficient way. More seriously, a
collapse in the centralized controller would lead to
the collapse of the whole system. The increasing
technology, such as Center-TRACON (Terminal
Radar Approach Control) Automation System for
trajectory calculations and Automatic Dependent
Surveillance (ADS) making use of Global
Positioning System (GPS) for navigation
information, lead to a new system in air traffic
control, namely the ‘free flight’. The idea of free
flight is based on more autonomous aircraft
capabilities that are only possible with the currently
developed communication, navigation, guidance and
intelligence technologies. One of the major problems
to be solved in free flight is the conflict resolution
that will avoid the crashing of aircrafts.
This paper deals with the problem of conflict
resol
ution as a sub-problem of air traffic
management based on free flight. In our previous
works we had studied on the same problem with
“potential field” (Erden et al., 2001) and
“negotiation” (Erden et al., 2002) based conflict
resolution techniques. Potential field based conflict
resolution is widely studied in the literature (Bosg,
1997; Eby et al., 1999; Tomlin at al., 1998; Pappas
et al., 1997; Tomlin et al., 2000). This approach is
attractive because it is simple to be applied. It is
based on simple calculations and it necessitates no
communication between aircrafts. However, lacking
of communication brings about the disadvantage of
lacking of cooperation between the aircrafts.
Negotiation based conflict resolution on the other
hand is a technique which solves the conflict by
negotiation between the aircrafts. This negotiation
system necessitates quite complicated reasoning
algorithms and a lot of communication between the
aircrafts. These two techniques represent the trade-
off between cooperation and simplicity in conflict
resolution algorithms. The “danger-concession”
based algorithm developed here might be considered
185
Erden M. and Leblebicio
˘
glu K. (2004).
CONFLICT RESOLUTION FOR FREE FLIGHT CONSIDERING DEGREE OF DANGER AND CONCESSION.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 185-192
DOI: 10.5220/0001133501850192
Copyright
c
SciTePress

as a middle range algorithm between these two.
Namely, the algorithm here lets some cooperation
with simpler communication between aircrafts. This
technique makes use of the idea of a compromise
between danger and concession. At any instant, the
aircrafts determine the amount of the danger they
face and the amount of the concession they have
made till that time. The functions determining these
amounts might be different for any aircraft. After the
amount of danger and concession are determined the
fuzzy rule based system determines the amount of
deviation for each aircraft.
2 CONFLICT AND CONFLICT
RESOLUTION
Aircrafts follow their optimised paths while flying.
The optimisation is made according to the goals of
each aircraft, in a global manner. The optimization
criteria can be based on fuel consumption,
atmosphere conditions, maneuverability of the
aircraft, timing considerations, passenger comfort,
etc. The structure of the plane, the pilot preferences,
the task to be accomplished, or any other thing may
affect the weight of cited criteria while constructing
the cost function of the optimization. As a result,
each aircraft has a different optimization function for
path construction, and these cost criteria may change
in time according to different situations. Although
the aircraft paths in certain areas may be constructed
by optimization, it is impossible to foresee all the
air-traffic around an aircraft’s flight path. Hence,
there is always the possibility that any two flight-
paths may cross each other at a point at same time.
When this occurs aircrafts come closer than a
minimum distance and a conflict occurs. The result
of such conflict may be so tragic that they may even
have a crash.
The accepted formal definition of the conflict is
given in terms of the accepted minimum separation
criteria between aircrafts. This criterion is 1000 feet
vertically and 3 miles horizontally around airport, 5
miles horizontally elsewhere in the en route
environment. Since the conflicts are mostly in the en
route the concern for the free flight conflict
resolution techniques is the 5 miles limit. In fact, this
5 miles standard comes from the technical limits of
the radar, which completes a scan every 12 seconds
(Perry, 1997). When the satellite-based ADS
technology is implemented on a large scale, this 5-
miles separation standard can be significantly
reduced, and hopefully the free flight system will
have much less separation standards. Currently this
standard is in order and the applications here will be
based on this 5-miles separation. In (Tomlin at al.,
1998), the detection zone defined by the radius of
aircraft’s sensing capability is suggested to be 100
miles. This range could be of concern for the
conflict resolution algorithms to operate in general
applications.
As mentioned before, general conflict situation
formalizations and resolution techniques are mainly
concerned with the en route flight. The en route
flights of aircrafts are generally constant speed,
linear, constant level cruise flights. The preferable
solutions for conflicts are maneuvers that change the
direction of the flight, in the same level, with
constant speed. This is what pilots prefer for flight
quality and passenger comfort. The conflict
formulation and the proposed resolution technique in
this research are in accord with this preference: the
conflict resolution technique here is based on
constant speed, constant level maneuvers.
In current air-traffic control systems, conflict
resolution is performed centrally by ATC. The
technique is totally centralized, and air traffic
controllers have the highly stressful task of manually
guiding and sequencing many aircrafts through their
sectors of airspace. In order to simplify the system,
ATC avoids the problem of multi aircraft conflict by
placing the aircrafts in holding patterns (Tomlin et
al., 1998). This simplification of the system results
in inefficient solutions. Furthermore, the current
system is unreliable since any failure in the central
ATC will affect all the aircrafts relying on that
center.
In free flight control scheme aircrafts will be
capable of solving conflicts between themselves.
The stressful task of ATC will be distributed among
the aircrafts; they will take action according to real
time situations, rather than predefined routes or
plans. Although the decentralization of the conflict
resolution will be achieved relying on the intelligent
systems, it still seems to be too early to leave out the
ATC. Even in a completely free flight system ATC
will exist to foresee some of the conflicts and inform
aircrafts about these when they are far away from
their detection zone. This will probably be more safe
and efficient since it will be possible to take effect in
advance. In this research such a contribution of ATC
to conflict resolution is not of concern. Only
autonomous conflict resolution applicable to the
conflicts in detection zone is studied.
When two conflicting aircrafts are taken into
account, they both have their pre-planned, probably
linearly directed, routes that cross each other at the
same time. In order to solve the conflict, at least one
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
186
of them should change its route in near region of the
conflict. But it will be fairer if both of them deviate
from their routes. Of course, each one will want to
deviate less from its path. (Then the conflict
resolution problem can be considered and modelled
as a zero-sum game (Mestertob-Gibbson, 1992),
being competed on the amount of deviation.) The
conflict resolution should avoid the conflict with
minimum deviation from the optimised paths. From
point of view of an aircraft there is a trade-off
between eliminating the danger and following the
optimal path. In the technique here the trade-off
between the danger and concession of an aircraft is
considered to represent the trade-off between the
sacrifices of the two aircrafts. It is assumed here that
when the two aircrafts determine their deviations
depending on the amount of danger of the conflict
and the concession each has made, the resultant
solution between the two aircrafts will be a fair one.
3 CONFLICT RESOLUTION
CONSIDERING DEGREE OF
DANGER AND CONCESSION
WITH A FUZZY RULE BASED
REASONING
Structure of the Model
In this conflict resolution model the degree of
danger and concessions made by the aircrafts are
taken into account. A fuzzy-rule based reasoning is
used to relate danger and concession values to the
deviation of aircraft from its optimum path. The
deviations are performed by turning in the clockwise
direction from the optimum paths. Clockwise
direction is considered here as the “‘rule of the road’
which specifies the direction of the avoidance for
conflict maneuvers” (Pappas, 1997). There is no
negotiation in this scheme, but some cooperation in
the sense to transmit the position, velocity, and
destination information. Considering the
communication between aircrafts, this technique is
not as complicated as the negotiation model (Erden
et al., 2002), but a little more complicated than the
potential field model (Erden et al., 2001). The
danger and concession values are determined by the
danger and concession functions of the aircrafts. It
is necessary to make appropriate danger and
concession definitions according to the structure of
the plane and formulate it to give a value in the
range [0,1]. These functions would be expected to be
different for each aircraft due to different
considerations in conflict resolution, but they are
taken as the same in the simulations here. From the
view of a plane the data it needs related to the other
plane is the other plane’s instant position, velocity
and destination. The solution generated by this
method will be a fair one according to the danger
and concession definitions. In the simulations in this
research, similar aircraft and similar pilot
considerations (minimum deviation) are assumed;
hence the results obtained are expected to be fair in
the sense of equal deviation from the paths. The
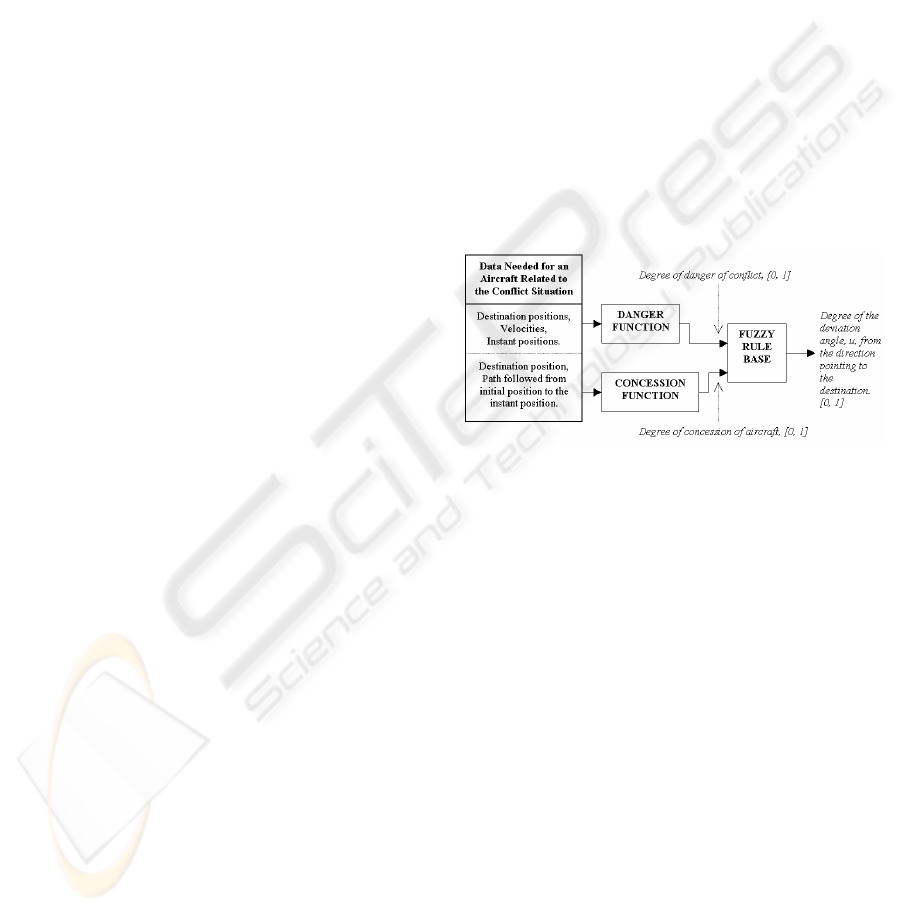
block diagram of this model is given in Fig. 1.
After the degree of deviation is determined
(Fig.1), it is multiplied by π/2, and this gives the
deviation angle of the plane. The deviation is (u
×
π
/2) degrees clock-wise turning according to the
direction pointing to the destination from the instant
position of the aircraft. Determination of this
deviation has nothing to do with the heading of the
aircraft; hence the aircraft may turn in counter
clockwise direction, if its direction of heading is
more than the required clockwise turning.
Figure 1: Block diagram for the reasoning of degree of
deviation.
Concession Function
Concession function assigns a degree of concession
value to the aircraft according to the conflict
situation. This calculation considers the path
followed by the plane up to that instant, and the path
it would have followed if no conflict had occurred.
Consider the situation in Fig. 2. In this figure the
conflict resolution process starts when the plane is at
point A, and B is the point that the plane wants to
reach after solving the conflict. S denotes the
optimum (in general shortest) path from A to B that
the aircraft would have followed if there had been no
conflict. P shows the instantaneous position of the
aircraft. The aircraft has followed the path
designated by L
1
up to that instant from the
beginning of conflict resolution, and at best it can go
through L
2
from that point on. The concession the
aircraft has made till now is a matter of the
difference between the optimum path without
conflict and the best path it can have followed from
that time on. Let’s define L as the sum of L
1
and L
2
,
CONFLICT RESOLUTION FOR FREE FLIGHT CONSIDERING DEGREE OF DANGER AND CONCESSION
187

L =L
1
+L
2
(1)
Then a normalized concession can be defined as
follows,
Concession=(L–S)/L , [0, 1] (2)
When L is too large, it means that very much
deviation from the optimum path has occurred, and
concession approaches to 1. Concession is zero if L
and S are the same, namely if there is no difference
between the optimum path and the best path that has
being followed till that instant.
Figure 2: Variables used in calculation of concession.
Danger Function
Danger function assigns a danger value to the
conflict situation according to the degree of danger.
Each aircraft is assigned the same value of danger
because they are both subject to the same conflict.
The function considers the minimum distance that
would occur between the aircrafts if they flew on the
direct paths from their instant positions to their
destinations. This distance is compared with the
minimum safe distance allowed between the
aircrafts.
Consider the conflict situation in Fig. 3. Aircraft
1 is initially at (x
1
,y
1
) at t=0, with velocity v
1
, its
destination being (x
2
,y
2
). Aircraft 2 is at (u
1
,z
1
), with
velocity v
2
, and its destination is at (u
2
,z
2
).The
distance between is d
a
at that instant. Their distances
to the intersection of their direct paths (x
i
,y
i
), are l
1
and l
2
respectively. Minimum distance is assumed to
occur when the aircrafts are at the square points at
time t
c
. This assumption is valid for all situations of
minimum distance occurrence; even in the case one
plane has passed the intersection point. A careful
inspection will reveal that in different cases the signs
of parameters will change but the results found will
be the same. Hence, it is valid to perform the
calculation for this particular case and apply it to any
conflict situation.
Using simple geometry, coordinates of the
intersection point of direct paths are found as in Eq.3
and Eq.4.
Figure 3: Calculation of the minimum distance in a
conflict situation.
1
u
2
u
1
v
2
v
1
x
2
x
1
y
2
y
1
x
2
x
1
y
2
y
1
x
1
u
2
u
1
z
2
z
1
u
1
y
1
z
i
x
−
−
−
−
−
−
−
⋅+
−
−
⋅−−
=
(3)
1
x
2
x
1
y
2
y
)
1
x
i
x(
1
y
i
y
−
−
⋅−+=
(4)
Then the remaining calculation is to find the
distance between the aircrafts at any time, and
minimizing it with respect to time. The distance
between the aircrafts at time t is given by Eq.5 (by
the cosine theorem).
(5)
α
cos)t
2
v
2
l)(t
1
v
1
l(2
2
)t
2
v
2
l(
2
)t
1
v
1
l()t(d −−−−+−=
When we take the derivative of d(t) and equate it
to zero, we find the minimum distance time as,
(6)
The minimum distance (d
min
) occurs at time t
c
.
The danger function is defined as in Eq.7.
2
v
1
v)cos(2
2
2
v
2
1
v
)
1
l
2
v
2
l
1
v(cos
2
l
2
v
1
l
1
v
c
t
⋅⋅−+
+⋅−+
=
α
α
⎪
⎪
⎩
⎪
⎪
⎨
⎧
≥
〈
−
⋅
=
min
r
min
dif,0
min
r
min
dif,
min
r
min
d
min
r
a
d
min
r
danger
(7)
Danger is calculated when the minimum distance
is less than the danger distance, r
min
, namely if a
conflict situation exists. Considering the first line of
the equation, the right part stands for the degree of
danger; it is 0 if d
min
is equal to r
min
(no conflict), and
1 if d
min
is equal to zero (the aircrafts will crush if the
conflict is not solved). The left part, r
min
/d
a
, makes
the distance between the aircrafts effective in
determining the degree of danger. If they are far
away from each other there is not much to worry
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
188
since they will have time to make maneuvers; then
this ratio is almost zero. On the other hand it
approaches to 1 if the aircrafts get close to each
other. With this function a value in the range [0, 1] is
assigned to the situation, as the degree of danger.
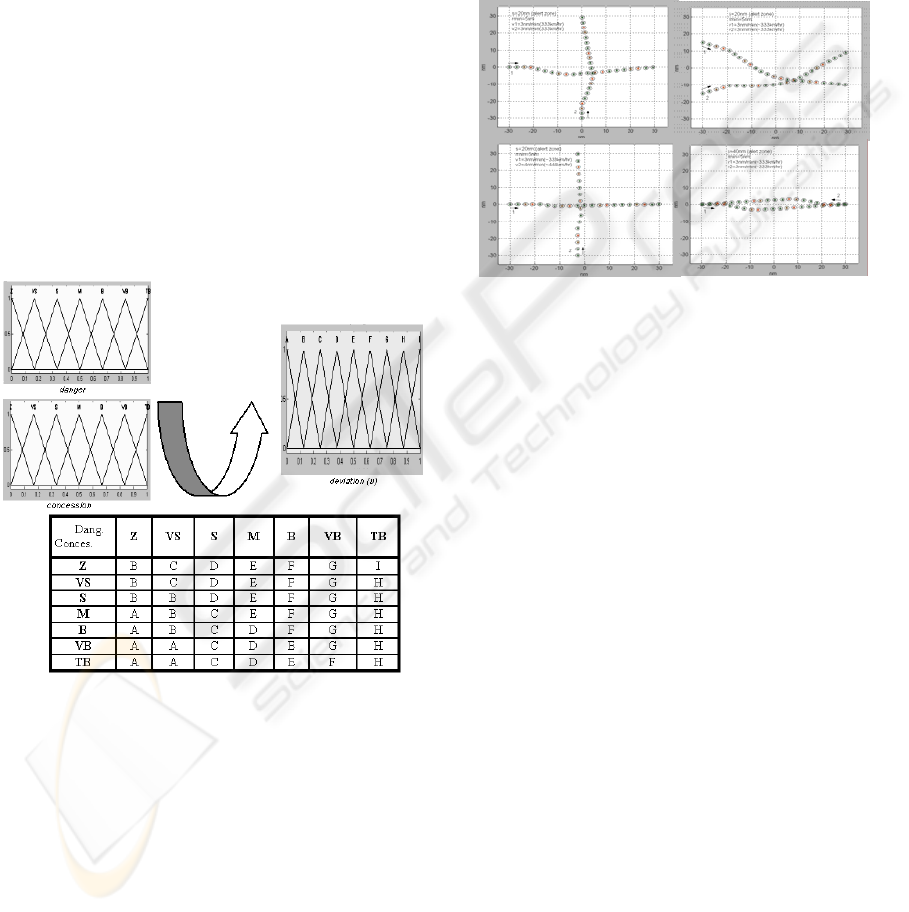
Fuzzy Reasoning
The fuzzy reasoning block assigns a degree of
deviation angle to each danger-concession pair. The
logic is simple, that the deviation should be
increased with increasing danger, and be decreased
with increasing concession. Since avoiding danger is
more important than making less concession the
predominance is given to the danger consideration.
(This can be observed on the last columns of the rule
table. If there is a big danger, the deviation is
determined to be very big – as F, G, I – even if the
concession is zero.) The input and output
membership functions and the rule table are shown
in Fig. 4. Input and output variables are in the range
[0, 1] as mentioned before.
Figure 4: Membership functions and the rule table of
fuzzy reasoning using the degree of danger and
concession.
Simulation Results
Fig. 5 shows four simulation results for different
conflict situations. The parameters and velocities of
the aircrafts are depicted on the figures. In these
simulation results there are two noteworthy things.
One of them is the smoothness of the paths. The
other is that the maneuvers have been made
immediately after the planes go in the alert zone, far
before they get too close to each other. For the figure
at the right-bottom, the alert zone is doubled (40nm)
compared to other figures, to see the early effect of
resolution. The planes have put themselves in non-
conflicting routes at about 20 nm away from each
other. The right-up figure is also important to see the
early effect and smooth path features of this
technique. (A comparison of this figure with the
similar ones in the negotiation case (Erden et al.,
2001) would reveal that, in this technique the paths
are smoother and the planes approach each other
only once as near as the minimum distance.)
Figure 5: Simulation results for danger-concession-fuzzy
resolution model.
Danger-Concession-Fuzzy Reasoning Based
Conflict Resolution for More Than Two Aircraft
Conflicts
Being suitable to be generalized for more than two
aircraft conflicts is another important feature of
conflict resolution algorithms. (Potential field
technique is very easy to be generalized for more
than two aircrafts (Erden et al., 2001), but
negotiation based conflict resolution is not. In our
study negotiation was generalized only to three
aircraft conflicts. (Erden et al., 2002). The technique
here is similar to potential field technique in the
sense of easiness to be generalized to more than two
aircrafts.
In danger-concession-fuzzy reasoning based
algorithm above each aircraft is assigned a degree of
danger value according to the conflict situation with
the other aircraft, and a concession value
considering how much deviation the aircraft has
made from its optimal path. These danger and
concession values are used in a fuzzy reasoning
module to determine the degree of deviation from
the direct path pointing to the destination. With this
degree of deviation the vector to be commanded to
the aircraft is determined. In order to generalize this
method to more than two aircraft conflicts, the same
algorithm is used for each aircraft in the conflict.
Each aircraft in the conflict is assigned a direction to
CONFLICT RESOLUTION FOR FREE FLIGHT CONSIDERING DEGREE OF DANGER AND CONCESSION
189
be followed by every other aircraft in the conflict.
The vectors pointing in these directions are summed,
and this gives the resultant direction to be followed
by the aircraft. In this way an average of the
deviations commanded by all aircrafts is obtained as
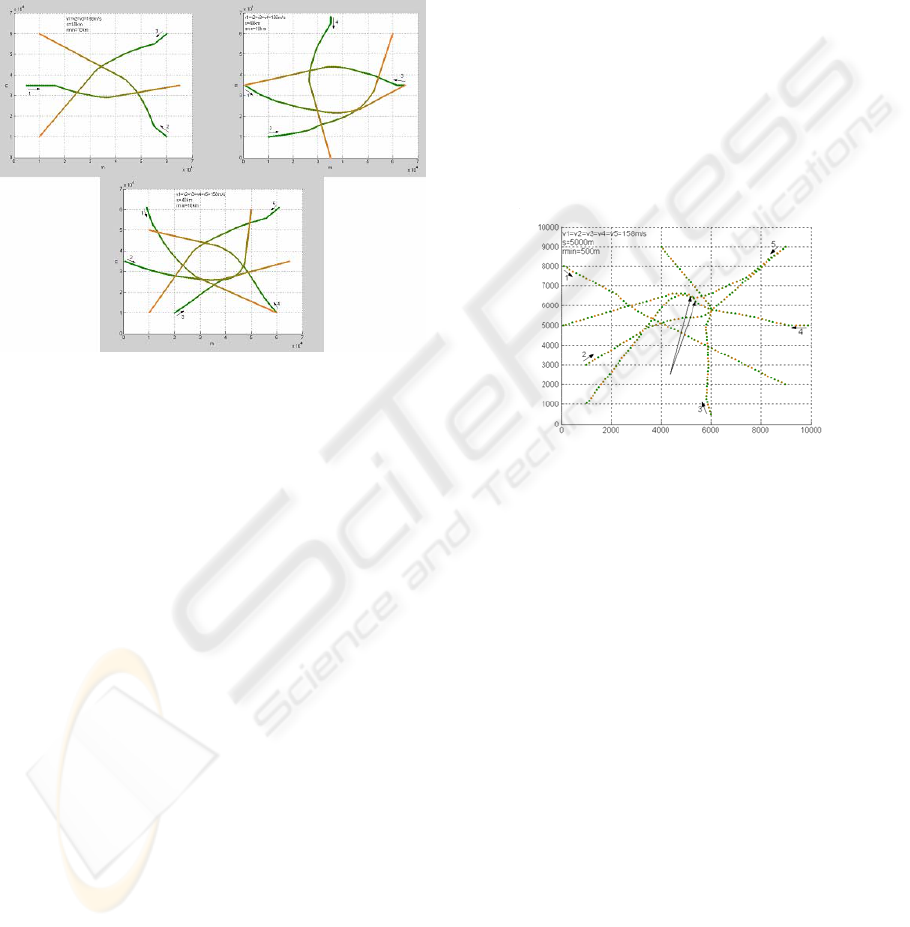
the resultant deviation. In Fig. 6, the results obtained
for three, four, and five aircraft conflicts are
depicted. The parameters used are indicated on the
figures.
Figure 6. Danger-Concession-Fuzzy Reasoning based
conflict resolution for more than two aircrafts.
In these figures one can observe two positive
features of the algorithm. First one is that aircrafts
make maneuvers in advance before approaching to
each other. In this way the conflict is solved much
before they come close. (This problem was faced
with the negotiation based conflict resolution (Erden
et al., 2002).) Second, the maneuver is distributed to
a wide range of route, hence sharp turns are avoided.
(This is a general problem of potential field based
conflict resolution, where unflyable paths occur
(Erden et al., 2001)). The alert zone in these
simulations is taken to be 40 km. Some of the
aircrafts are already in the alert zone of others when
the simulation starts.
A drawback of this method is that: the aircrafts
are directed according to the determined directions,
but the safety of these directions is not tested at each
iteration. (That was the case in negotiation based
conflict resolution). In the case of the method
described here, there may be situations that two
aircrafts approach too much to each other when the
traffic is too crowded. This is the case in Fig. 7. In
this figure the parameters related to danger and alert
zones are different from the above figures. The
situation is a five aircraft conflict. Aircrafts 4 and 5
come too close to each other at the point indicated
by the arrow. At these points the distance between
them is less than the minimum separation distance
depicted on the figure. This kind of a problem is
probable to occur with any kind of conflict
resolution technique when the number of aircrafts in
the conflict situation is heavily increased. This result
points to the fact that heavier air traffic conditions
necessitate more safe-guaranteed conflict resolution
techniques. It should be necessary to equip the
conflict resolution algorithms with testing modules
and modify the generated paths if the requirements
are not met. It would also be possible to avoid such
problems by tuning the parameters of the algorithm.
For example increasing the coefficient in danger
calculation might result in paths more far from each
other. However, such an approach would provide a
partial solution rather than a general one. This is
because there would occur again such problems if
the conflict situation is changed and more and more
aircrafts are included.
Figure 7: A five aircraft conflict resolution in which
aircrafts 4 and 5 come too close to each other.
4 CONCLUSION
The increase in air traffic, force the air traffic
management systems to be evolved towards more
decentralized control systems. With the improved
technologies in the fields of radio wave
communication, navigation, and intelligence, it
seems the current air traffic management systems
will soon be replaced with multi agent based
decentralized management systems compatible with
‘free flight’. Free flight is a recently developed air
traffic control structure in which much of the
workload of the central controller is distributed
among the aircraft agents and aircrafts are capable of
planning their paths and solving much of the
conflicts cooperating with each other. One of the
major problems to be solved in a free flight system
is “conflict resolution”. The paths of two aircrafts
are said to be conflicting if the aircrafts come closer
than a predefined distance at some point of these
paths. Conflict resolution algorithms are to solve
these conflicts by modifying the pre-planned paths
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
190

of aircrafts in a proper manner. The matter here is
that conflict resolution algorithms should be
compatible with the free flight understanding, in the
sense that they should be feasible to be applied to
different optimisation strategies of aircrafts. It is not
supposed to force the aircrafts in predefined
structured paths, rather to consider different criteria
such as size, maneuverability, pilot considerations,
passenger comfort, etc and command an appropriate
maneuver in real time. The paths generated should
be near optimal with respect to these aircraft specific
criteria. Therefore the matter is to develop conflict
resolution algorithms capable of handling different
optimization strategies.
The conflict resolution algorithm developed here
is based on considering the degree of danger in the
conflict, and the degree of concession the aircraft
has made by deviating from its optimal path till that
instant. Degree of danger and degree of concession
are fed to a rule based fuzzy reasoning module to
determine the degree of deviation. In determining
the degree of danger the minimum distance that
would occur from the optimal path is utilized. For
this the information of actual position, destination,
and velocity of the other aircraft is needed.
(Therefore a communication channel, less
complicated than in the case of negotiation is needed
for transmission of some data. (Erden et al., 2002))
This scheme is also suitable for the consideration of
different criteria for aircrafts. The definitions of
danger and concession may change with respect to
different criteria. (It seems that this technique lies
between the potential field (Erden et al., 2001) and
negotiation (Erden et al., 2002) approaches
considering the simplicity in the sense of algorithmic
and technological applicability. The algorithm is
simpler than negotiation but not as simple as
potential fields, and it needs some communication
but not as much as in the case of negotiation.)
The technique presented here can be compared
with the ones we had studied before also on the basis
of the paths generated. In potential field case,
although the technique is simple to apply and easy to
manipulate, the paths generated tend to be stuck in
some situations and sometimes result in unflyable
paths. This is a result of the fact that the forces
defined may cancel out the effects of each other in a
way the aircraft cannot jump out of the situation it is
stuck in. And in some instants the effect of one of
the forces immediately becomes so significant that a
very sharp, unflyable path occurs. These two
problems are faced with in many different
applications of potential fields with different force
definitions during the studies. The negotiation
technique overcomes this problem, since the
maneuvers are determined by negotiation rather than
the guidance of forces. However, this technique still
suffers from the sharp turnings although they are
flyable. Since the negotiation cannot take place in
far distances, the maneuvers can only be made when
the aircrafts come close enough to be able to
negotiate. Starting the maneuvers in close regions
results in sharp turnings. The danger-concession
technique does not need a complicated
communication like negotiation. It is possible that
the position and velocity information of aircrafts can
be transferred to considerably far distances.
Therefore, danger-concession technique enables the
aircrafts to make maneuvers in advance before
coming close to each other. Consequently the
resulting paths are smooth and almost equally
distributed to all flight paths. However, it should be
noted that the paths generated by the danger-
concession technique are not tested in each
maneuver, as it is case in the negotiation technique.
A way of equipping the danger-concession
technique with a testing mechanism might be to
incorporate it with negotiation. This incorporation
might be in a way that aircrafts follow the paths
generated by the danger-concession technique, and
start negotiation in the case they are close to each
other.
Another comparison of the three conflict
resolution techniques may be based on how much
cooperation of the other parties in conflict is needed
for the techniques to work properly. This point is
important especially when a breakdown in the
system of any aircraft is considered. The most robust
technique considering a breakdown is the potential
field based conflict resolution, since the only thing
necessary is the position information of the other
aircrafts, which can easily be gathered with onboard
radars. Hence, it does not need any communication
between aircrafts. The danger-concession based
technique, presented here, necessitates the final
position and velocity information of the other
aircraft. Therefore it needs some communication.
However, velocity and final position information can
be estimated with some simple onboard algorithms.
In case of any communication breakdown these
estimation algorithms may take effect and in this
way the algorithm may not necessitate any
communication between aircrafts. In the negotiation
case communication between the aircrafts is a must.
Therefore negotiation based conflict resolution could
not be used if any of the aircrafts is unable to
negotiate.
It should be noted that the ‘free flight’ based air
traffic management is yet in the level of an idea to
be applied in future. Therefore the flight and conflict
CONFLICT RESOLUTION FOR FREE FLIGHT CONSIDERING DEGREE OF DANGER AND CONCESSION
191

resolution specifications of this kind of a flight
system are not yet well defined. Besides, there is not
a widespread established technology compatible
with this scheme. This research should be
considered as a study that may give ideas for
constructing future conflict resolution schemes for
free flight. The technology used, the design
structure, and the capability of high-tech aircrafts
will determine the concrete specifications of the
conflict resolution algorithms to be used in free
flight. One more thing to be noted is that this
research is a simulation based study; hence the
algorithms developed here lack mathematical
verifications. Therefore in any application of these
kinds of conflict resolution techniques, some
assurance mechanisms may be necessary to test the
resulting paths (such an assurance exists in
negotiation based conflict resolution (Erden et al.,
2001)).
REFERENCES
Alliot, JM., H. Gruber, G. Jolly, M. Schoenauer, 1992.
Genetic algorithms for solving air traffic control
conflicts. In Proceedings 9
th
IEEE Conference of
Artificial Intelligence Application, August 1992.
Bicchi, A., L. Pallottino, 2000. On optimal cooperative
conflict resolution for air traffic management systems.
In Proceedings IEEE Transactions on Intelligent
Transportation Systems, December 2000.
Bosc, J.F., G. Dean, 1997. An implementation of reactive
distributed air conflict resolution system. In:
Proceedings IEEE.
Bui, T., J. Lee, 1999. An agent based framework for
building decision support systems. In Decision
Support Systems 25 (1999) 225-237.
Clements, J.C., 1999. The optimal control of collision
avoidance trajectories in air traffic management. In
Transportation Research Part B 33 (1999) 265-280.
Eby, M., and Kelly, W., 1999. Free Flight Separation
Assurance Using Distributed Algorithms. In
Proceedings of the 1999 IEEE Aerospace Conference,
Vol. 2, pp. 429-441.
Erden, M.S., K. Leblebicioğlu, U. Halıcı, 2001. Çok ajanlı
system yaklaşımıyla hava trafiği kontrolü, In 9.Sinyal
İşleme ve Uygulamaları Kurultayı, April 2001,
Gazimağosa – KKTC.
Erden, M.S., K. Leblebicioğlu, U. Halıcı, 2002. Conflict
resolution by negotiation. Abstract In IFAC 15
th
World
Congress Book of Abstracts, 230, Barcelona, Spain,
July 2002; full paper in the related CD.
Faratin, P., C. Sierra, N.R. Jennings, 1998. Negotiation
decision functions for autonomous agents. In Robotics
and Autonomous Systems 24 (1998) 159-182.
Mbede, J.B., X. Huang, M. Wang, 2000. Fuzzy motion
planning among dynamic obstacles using fields for
robot manipulators. In Robotics and autonomous
systems 32 (2000) 61-72.
McFetridge, L., M. Y. Ibrahim, 1998. New technique of
mobile robot navigation using a hybrid adaptive fuzzy
potential field approach. In Computers Ind. Engng. 35
(3-4) (1998) 471-474.
Mesterton-Gibbons, M., 1992. An Introduction to Game
Theoretic Modelling, Redwood City,
Özdemir, S.Z., 2001. Proposal of two system modeling
practices: “Fuzzy discrete event dynamical systems
and fuzzy differential game theory”, M.S. Thesis,
Department of Electrical and Electronics Engineering,
METU, Ankara, 2001.
Pappas, G.J., C.J. Tomlin, J. Lygeros, D.N. Godbole and
S.S. Sastry, 1997. A next generation architecture for
air traffic management systems. In IEEE Conference
on Decision and Control, pp 2405-2440, San Diego,
California, USA, December 10-12, 1997.
Perry, T.S., 1997. In search of the future of air traffic
control, In IEEE Spectrum 34 (8) (August 1997) 19-
35.
Petrick, H., M. C. Felix, 1998. A soft dynamic
programming approach for on-line aircraft 4-D
trajectory optimization. In European Journal of
Operational Research 107 (1998) 87-95.
Reif, J.H., H. Wang, 1999. Social potential fields: a
distributed behavioral control for autonomous robots.
In Robotics and Autonomous Systems 27, (1999) 171-
194.
Sekhavat, S., S.Sastry. 1998. A distributed automatic air
traffic management system. In
Proc. of the Int. Symp.
on Robotics and Automation
, Saltillo (MX), December
1998.
Tomlin C., G. J. Pappas, and S. Sastry, 1998. Conflict
Resolution for Air Traffic Management: A Study in
Multi-Agent Hybrid Systems. In IEEE Trans.
Automatic Control, vol. 43, no. 4, 1998, pp. 509-521.
Tomlin, C., G. Pappas, J. Kosecka, J. Lygeros, S. Sastry,
1998. 2-1/2 D Conflict resolution maneuvers for
ATMS, In Proceedings of the 37
th
IEEE Conference
on Decision & Control, Tampa, Florida USA,
December 1998.
Tomlin, C., R. Ghosh, 2000. Maneuver design for multiple
aircraft conflict resolution. In Proceedings of the
American Control Conference, Chicago, Illinos, June
2000.
Wangermann, J.P., R.F. Stengel, 1998. Principled
negotiation between agents: a model for air traffic
management. In Artificial Intelligence in Engineering
12 (1998) 177-187.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
192
