
PARTIAL VIEWS MATCHING USING A METHOD BASED ON
PRINCIPAL COMPONENTS
Santiago Salamanca Mi
˜
no
Universidad de Extremadura (UEX)
Escuela de Ingenir
´
ıas Industriales. Badajoz. Spain
Carlos Cerrada Somolinos
Universidad Nacional de Educaci
´
on a Distancia (UNED)
Escuela T
´
ecnica Superior de Ingenier
´
ıa Industrial. Madrid. Spain
Antonio Ad
´
an Oliver
Universidad de Castilla la Mancha (UCLM)
Escuela Superior de Ingenier
´
ıa Inform
´
atica. Ciudad Real. Spain
Miguel Ad
´
an Oliver
Universidad de Castilla la Mancha (UCLM)
Escuela Universitaria de Ingenier
´
ıa T
´
ecnica Agr
´
ıcola. Ciudad Real. Spain
Keywords:
Matching, recognition, unstructured range data, 3D computer vision.
Abstract:
This paper presents a method to estimate the pose (position and orientation) associated to the range data of an
object partial view with respect to the complete object reference system. A database storing the principal com-
ponents of the different partial views of an object, which are generated virtually, is created in advance in order
to make a comparison between the values computed in a real view and the stored values. It allows obtaining
a first approximation to the searched pose transformation, which will be afterwards refined by applying the
Iterative Closest Point (ICP) algorithm.
The proposed method obtains very good pose estimations achieving very low failure rate, even in the case of
the existence of occlusions. The paper describes the method and demonstrates these conclusions by presenting
a set of experimental results obtained with real range data.
1 INTRODUCTION
Relative pose of the partial view of an object in a
scene with respect to the reference system attached to
the object can be determined by using matching tech-
niques. This work is concerned with the problem of
matching 3D range data of a partial view over the 3D
data of the complete object. Resolution of this prob-
lem is of utmost practical interest because it can be
used in applications like industrial robotics, mobile
robots navigation, visual inspection, etc.
A standard way of dealing with this problem is to
generating a model from the data, which allows ex-
tracting and representing some information associated
to the source data. There are two basic classes of rep-
resentation (Mamic and Bennamoun, 2002): object
based representations and view based representations.
In the first class, models are created by extracting
representative features of the objects. This type can be
divided into four major categories: boundaries repre-
sentations, generalized cylinders, surface representa-
tions and volumetric representations, being the third
one the mostly used. In this case, a surface is fitted
from the range data and then certain features are ex-
tracted from the fitted surface. Spherical representa-
tions belong to this category, being the Simplex An-
gle Image (SAI) representation (Higuchi et al., 1994;
Hebert et al., 1995; Ad
´
an et al., 2001b; Ad
´
an et al.,
2001a) an important example of this type of surface
representation. In general terms, object based repre-
sentations are not the most suitable ones for applica-
tion in partial views matching.
Concerning to the view based representations they
try to generate the model as a function of the di-
verse appearances of the object from different points
of view. There exist a lot of techniques that belong to
3
Salamanca Miño S., Cerrada Somolinos C., Adán Oliver A. and Adán Oliver M. (2004).
PARTIAL VIEWS MATCHING USING A METHOD BASED ON PRINCIPAL COMPONENTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 3-10
DOI: 10.5220/0001137200030010
Copyright
c
SciTePress

this class (Mamic and Bennamoun, 2002). Let us re-
mark the methods based in principal components (PC)
(Campbell and Flynn, 1999; Skocaj and Leonardis,
2001), which use them in the matching process as dis-
criminant parameters to reduce the initial range im-
ages database of an object generated from all possible
viewpoints.
The method presented in this paper can be classi-
fied halfway of the two classes because the appear-
ance of the object from all the possible points of
view are not stored and managed. Instead of that,
only some features of each view are stored and han-
dled. More specifically, just three critical distances
are established from each point of view. These dis-
tances are determined by means of the principal com-
ponents computation. A first approach to the transfor-
mation matrix between the partial view and the com-
plete object can be obtained from this computation.
The definitive transformation is finally achieved by
applying a particular version of the Iterative Closest
Point (ICP) algorithm (Besl and McKay, 1992) to the
gross transformation obtained in the previous stage.
A comparative study of different variants of the ICP
algorithm can be seen in (Rusinkiewicz and Levoy,
2001).
The paper is organized as follows. A general de-
scription of the overall method is exposed in the next
section. The method developed to obtain the database
with the principal components from all the possible
viewpoints are described is section 3. Section 4 is de-
voted to present the matching algorithm built on top
of the principal components database. A set of exper-
imental results is shown in section 5 and conclusions
are stated in section 6.
2 OVERALL DESCRIPTION OF
THE METHOD
As it has been mentioned, the first stage of the pro-
posed method is based on the computation of the prin-
cipal components from the range data corresponding
to a partial view. Let us call X to this partial view.
Principal components are defined as the set of eigen-
values and eigenvectors {(λ
i
, ˜e
i
) |i = 1, . . . , m} of
the Q covariance matrix:
Q = X
c
X
T
c
(1)
where X
c
represents the range data translated with
respect to the geometric center.
In the particular case we are considering, X
c
is a
matrix of dimension n × 3 and there are three eigen-
vectors that point to the three existing principal direc-
tions. The first eigenvector points to the spatial direc-
tion where the data variance is maximum. From a ge-
ometrical point of view, and assuming that the range
data is homogeneously distributed, it means that the
distance between the most extreme points projected
over the first direction is the maximum among all pos-
sible X
c
couple of points. The second vector points
to another direction, normal to the previous one, in
which the variance is maximum for all the possible
normal directions. It means again that the distance
between the most extreme points projected over the
second direction is the maximum among all the pos-
sible directions normal to the first vector. The third
vector makes a right-handed reference system with
the two others. The eigenvalues represent a quantita-
tive measurement of the maximum distances in each
respective direction.
From the point of view of its application to the
matching problem it is important to remark firstly that
the eigenvalues are invariant to rotations and trans-
lations and the eigenvectors invariant to translations,
and secondly that the frame formed by the eigenvec-
tors represents a reference system fixed to the own
range data. The first remark can be helpful in the
process of determining which portion of the complete
object is being sensed in a given partial view, i.e. the
recognition process. The second one gives an initial
estimation of the searched transformation matrix that
matches the partial view with the complete object in
the right pose. In fact, it is only valid to estimate the
rotation matrix because the origins of the reference
systems do not coincide.
To implement the recognition process it is neces-
sary to evaluate, in a previous stage, all the possible
partial views that can be generated for a given com-
plete object. We propose a method that considers a
discretized space of the viewpoints around the object.
Then a Virtual Partial View (VPV) is generated for
all the discretized viewpoints using a z-buffer based
technique. Principal components of each one of these
VPV are then computed and stored, such that they can
be used in the recognition process.
Initial information of the possible candidate zones
to matching a sample partial view to the complete ob-
ject can be extracted by comparing the eigenvalues of
the sample with the stored values. Nevertheless, this
is only global information and it only concerns to ori-
entation estimation. A second process must be imple-
mented in order to obtain a fine estimate of the final
transformation matrix. We use the ICP algorithm ap-
plied to the set of candidates extracted in the previous
process. The transformation matrix estimated from
the eigenvectors is used as the initial approximation
required by the ICP algorithm. The final matching
zone is selected as the one that minimizes the ICP er-
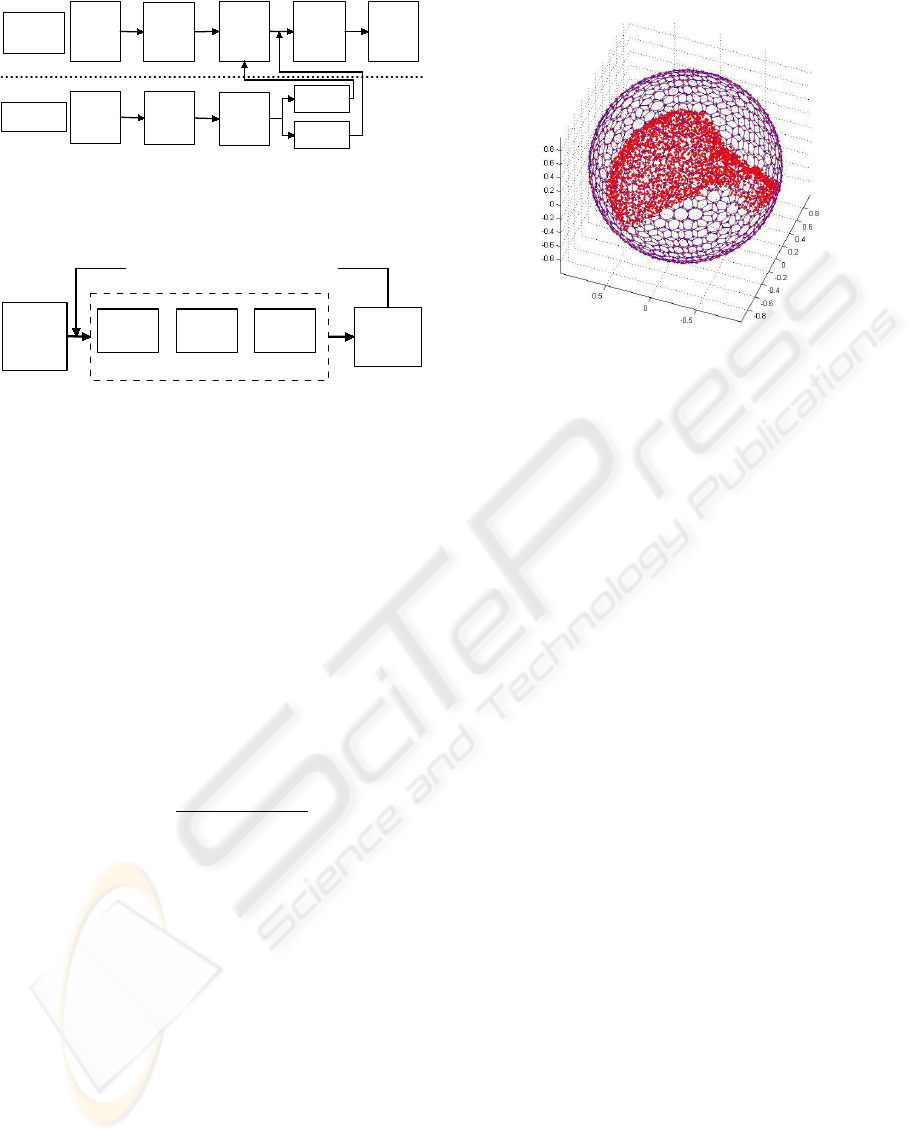
ror. Figure 1 shows a schematic block diagram of the
entire developed method. More implementation de-
tails are explained in next sections.
ICINCO 2004 - ROBOTICS AND AUTOMATION
4
Transformation
computation
process
Range data of
the sample
partial view PV
PV principal
components
computation
Eigenvalues
comparison
(View Point
estimation)
Initial
Transformation
matrix
estimation
ICP algorithm
application.
Final
transformation
matrix
computation
Model
generation process
(off-line)
Range data of
the complete
object
Virtual Partial
Views ( VPV)
computation
Principal
Components
of the VPV
computation
Eigenvalues
storage
Eigenvectors
storage
Figure 1: Block Diagram of the proposed method to find
the best match of a given range data partial view with the
complete object.
Range data of
the complete
object
(input data)
Principal
Components
of the VPV
computation
Repeat for all the view points around the object
Multipixel
image
generation
z-buffer
algorithm
application
Data filtering
Virtual Partial View (VPV) computation
Figure 2: Block diagram of the process followed to generate
the principal components database.
3 PRINCIPAL COMPONENTS
DATABASE GENERATE
A database storing the principal components of all the
possible partial views that can be generated from the
range data of a given complete object must be com-
puted in an off-line previous stage. Figure 2 shows
the steps followed in this process.
Range data of the complete object is firstly trans-
lated to its geometric center and then normalized to
the unit value. Therefore, we will start to work with
the following normalized range data:
M
n
=
M − c
max (kM − ck)
(2)
where M is the range data of the complete object, c
is the geometric center, max is the maximum function
and || · || is the Euclidean distance. At this point, as
can be observed in Figure 2, the most important step
of the method is the computation of the virtual partial
views (VPV) described in the next subsection.
3.1 Virtual Partial Views
Computation
A VPV can be defined as a subset of range data points
O ⊂ M
n
virtually generated from a specific view-
point VP, and that can be approximated to the real par-
tial view obtained with a range sensor from the same
VP.
Notice that in this definition it is necessary to con-
sider, apart from the object range data itself, the view-
point from which to look at the object. In order to
Figure 3: Visual space discretization around the complete
object range data. Each sphere node constitutes a different
viewpoint from which a VPV is estimated.
take into account all the possible viewpoints, a dis-
cretization of the visual space around the object must
be considered. A tessellated sphere circumscribed to
the object is used for that and each node of the sphere
can be considered as a different and homogeneously
distributed viewpoint from where to generate a VPV
(see Figure 3).
For a specific VP its corresponding virtual partial
view is obtained by applying the z-buffer algorithm.
This algorithm is widely used in 3D computer graph-
ics applications and it allows defining those mesh
patches that can be viewed from a given viewpoint.
Specifically, only the facets with the highest value of
the z component will be visible, corresponding the Z-
axis with the viewing direction.
This method is designed to apply when there is
information about the surfaces to visualize, but not
when just the rough 3D data points are available.
Some kind of data conversion must be done previous
to use the algorithm as it is. We have performed this
conversion by generating the named multipixel matrix
of the range data. This matrix can be obtained as fol-
lows. First a data projection over a plane normal to
the viewing direction is performed:
M
0
n
= UM
n
(3)
where U is the matrix representing such projection.
This transformation involves a change from the orig-
inal reference system S = {O, X, Y, Z} to the new
one S
0
= {OX
0
Y
0
Z
0
} where the Z’ component, de-
noted as z’, directly represents the depth value. From
these new data an image can be obtained by discretiz-
ing the X’Y’ plane in as many pixels as required, and
by assigning the z’ coordinate of each point as the im-
age value. Notice that in this process several points
can be associated to the same pixel if they have the
PARTIAL VIEWS MATCHING USING A METHOD BASED ON PRINCIPAL COMPONENTS
5
Projected
2D points
Depth
3D points with the
same 2D projection
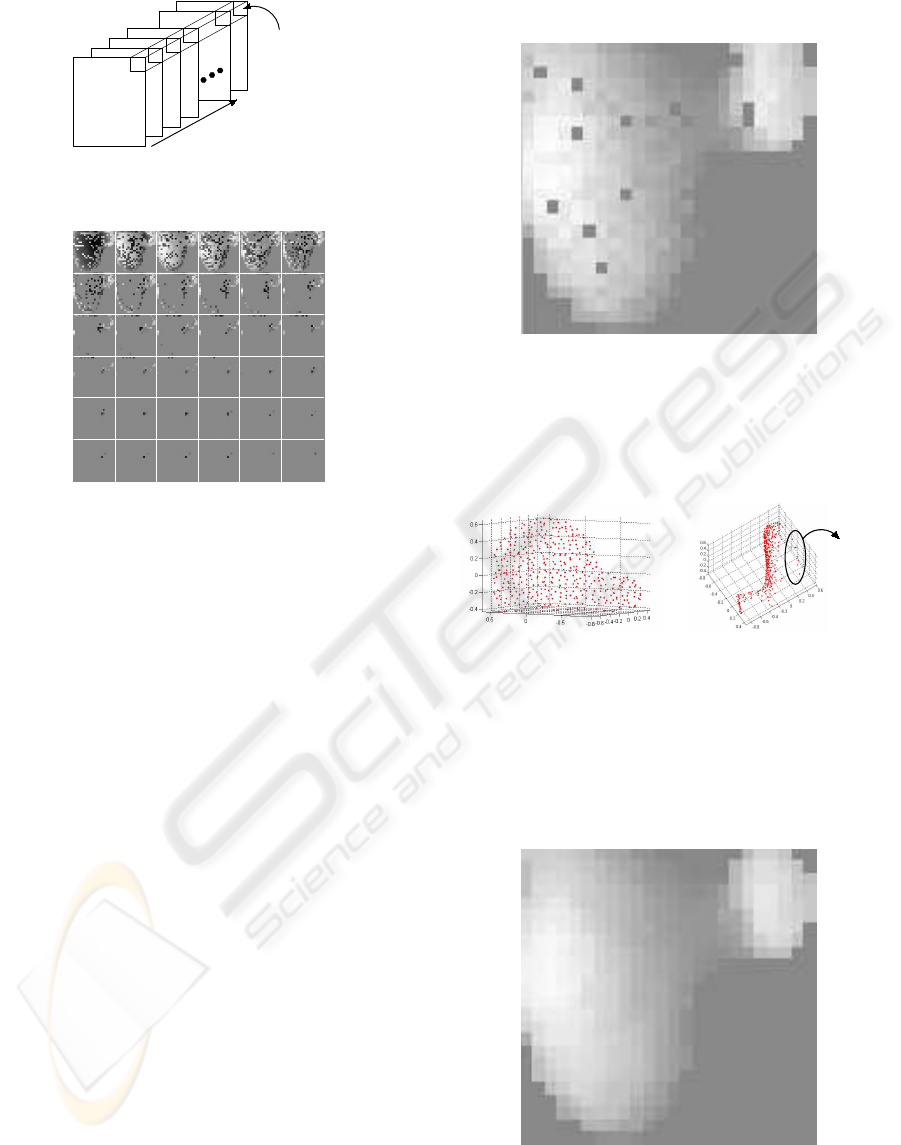
Figure 4: Multipixel matrix representation
Figure 5: Visualization of each one of the planes of the mul-
tipixel matrix as a compacted intensity image
same (x’,y’) coordinate values. To avoid depth infor-
mation loss in these cases, the image values are stored
in a three dimensional matrix. For that reason the cre-
ated structure is denoted as multipixel matrix.
Figure 4 shows a typical scheme of this matrix. On
the other hand, figure 5 shows as a grey-scaled image
and in a compacted manner all the two-dimensional
matrices that conform this structure. Pixels next to
white color represent higher z’ values. Figure 6 shows
an image obtained by selecting for each pixel the
maximum of its associated z’ values. If the data points
corresponding to these selected z’ values are denoted
as O
0
⊂ M
0
n
, then the VPV can be obtained by ap-
plying the inverse of the U transformation defined in
equation (3), i.e.:
O = U
−1
O
0
(4)
The set of range data points corresponding to a
VPV obtained after the application of the described
process to a sample case can be seen in the figure 7 (a)
and (b). It can be observed that results are generally
acceptable but some spurious data appear. These val-
ues were already noticeable from figure 6 where they
look like a salt-pepper noise effect. Due to this fact,
a median filter (see figure 8) is applied to the image
before evaluating the equation (4), in order to obtain
the definitive range data points of the searched VPV
(figure 9).
Figure 6: Intensity image associated to the maximum value
of z
0
at each pixel.
(b)
Spurious data
(a)
Figure 7: Range data points corresponding to a Virtual Par-
tial View. They are shown from two different points of view
to improve their visualization. In (b) the existence of spuri-
ous data are more evident.
Figure 8: Image obtained after applying a median filter to
the image shown in figure 6
ICINCO 2004 - ROBOTICS AND AUTOMATION
6
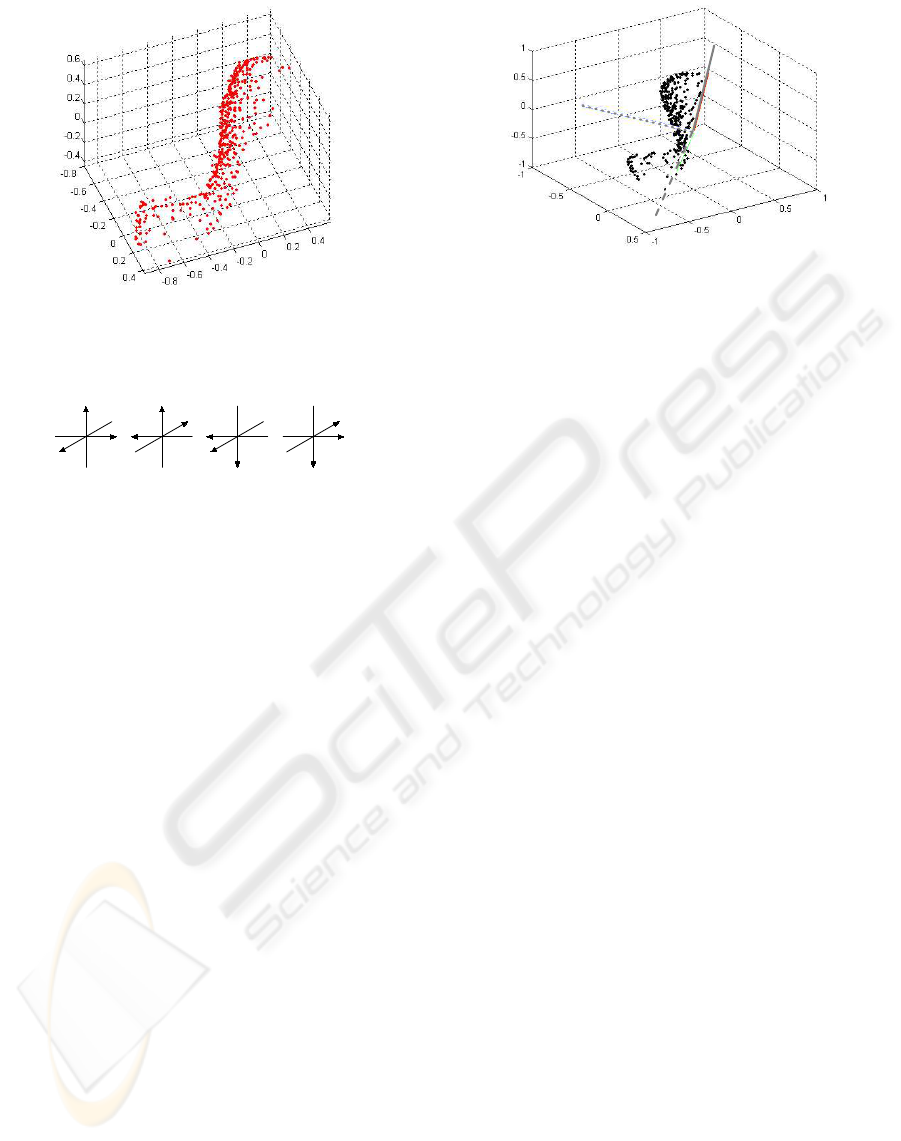
Figure 9: Definitive range data of a VPV. It can be observed,
comparing with the figure 7(b), that the noise has been re-
moved
X
Y
Z
X
Y
Z
X
Y
Z
Y
Z
X
Figure 10: Four ambiguous frames for direction combina-
tions
3.2 Principal Components of VPV
Computation
Once the range data points of a VPV have been de-
termined the associated principal components can be
computed from them. They will be the eigenvectors
and the eigenvalues of the covariance matrix at (1),
where X
c
is now O.
Due to the fact that the eigenvectors only provide
information about the line vectors but not about their
directions, some uncertainties can appear in the ul-
terior matching process. For example, using right
handed coordinate systems like in figure 10, if no di-
rection is fixed in advance there are four ambiguous
possibilities for frame orientation. It can be also seen
in the figure 10 that when one of the line directions is
fixed only two possibilities appear, being related one
to the other by a rotation of π radians around the fixed
axis. For that reason, before storing the VPV eigen-
vectors, following steps are applied:
1. Verify if the third eigenvector forms an angle
smaller than π/2 with the viewing direction. If not,
we take the opposite direction for this eigenvector.
2. The first eigenvector direction is taken to build to-
gether with the two others a right-handed frame.
After these steps, principal components of the VPV
are stored in the database for posterior use in the
matching process. Figure 11 shows the definitive
principal components of a given VPV.
Figure 11: Definitive eigenvectors computed from the range
data of a VPV. The first one is represented in red, second in
green and the third in blue.
4 MATCHING PROCESS
The developed matching process is divided in four
stages (see figure 1):
1. Principal components computation of the acquired
partial view.
2. eigenvalues comparison and initial candidates
zones selection.
3. Initial transformation estimation by using the
eigenvectors.
4. ICP algorithm application to determine the final
transformation.
The method developed to carry out the three first
stages is described in the next subsection. Then we
will explain how the ICP algorithm is applied to ob-
tain the final result.
4.1 Initial Transformation Matrix
Computation
The first thing to do is to compute the eigenvectors
and eigenvalues of the acquired range partial view.
To maintain equivalent initial conditions than in the
VPV computation we must apply the same steps ap-
plied to the complete object range data: normalization
with respect to the geometric center of the complete
object, M; multipixel matrix generation; z-buffer al-
gorithm application and, finally, data filtering. In this
case the main objective is to try the handled data being
the most similar possible to those used in the principal
component computation of the VPV.
After that, the principal components are computed
and the definitive vector directions are established fol-
lowing the steps described in subsection 3.2. Then the
eigenvalues of the acquired view are compared with
the eigenvalues of all the stored VPV by evaluating
the following error measurement:
PARTIAL VIEWS MATCHING USING A METHOD BASED ON PRINCIPAL COMPONENTS
7

(a) (b) (c)
Figure 12: Results of the comparing eigenvectors algo-
rithm. (a) Visualization of the acquired range data partial
view. (b) Five selected candidate viewpoints from e
λ
error
computation. (c) Rotated data results for the first candidate
e
λ
= ||Λ
v
− Λ
r
|| (5)
where Λ
v
= {λ
v
1
, λ
v
2
, λ
v
3
} is the vector formed by the
eigenvalues of a VPV, Λ
r
= {λ
r
1
, λ
r
2
, λ
r
3
} is the vector
formed by the eigenvalues of the real partial view and
|| · || is the Euclidean distance.
Notice that a given VPV can achieve the minimum
value of e
λ
and not being the best candidate. This
is because the feature we are using is a global one.
For that reason we take a set of selected candidates to
compute the possible initial transformation. Specifi-
cally, we are selecting the five VPV candidates with
less error.
These initial transformations do not give the exact
required rotation to coupling the eigenvector because
the original data are not normalized with respect the
same geometric center. Mathematically, what we are
computing is the rotation matrix R such that applied
to the eigenvectors of the real partial view, E
r
, gives a
set of eigenvectors coincident with the VPV ones, E
v
.
Because both E
r
and E
v
represent orthonormal ma-
trices, the searched rotation matrix can be computed
from the next expression:
R = E
r
(E
v
)
−1
= E
r
(E
v
)
T
(6)
Because of the ambiguity of the two possible di-
rections existing in the eigenvectors definition, the fi-
nal matrix can be the directly obtained in (6) or an-
other one obtained after rotating an angle of π radians
around the third eigenvector.
Figure 12 shows the results of the comparing eigen-
vectors algorithm. In (a) the real partial view is
shown. The five selected candidates with less e
λ
er-
ror values are remarked over the sphere in part (b).
An arrow indicates the first candidate, i.e. the corre-
sponding to the minimum e
λ
value. The approximate
R matrix obtained as a result of equation (6) evalua-
tion can be observed in (c). In this case the result cor-
responds to the VPV associated to the first candidate
viewpoint. Definitive matrix will be obtained after a
refinement process by means of the ICP algorithm ap-
plication.
Summarizing, the resulting product of this phase is
a transformation matrix T whose sub matrix R is ob-
tained from equation (6) and whose translation vector
is t = [0, 0, 0]
T
.
4.2 ICP Algorithm Application
The Iterative Closest Point (ICP) (Besl and McKay,
1992) is an algorithm that minimizes the medium
quadratic error
e(k) =
1
n
X
||P − P
0
||
2
(7)
among the n data points of an unknown object P’,
called scene data, and the corresponding data of the
database object P, called model data. In our particu-
lar case, the scene data are the range data of the real
partial view, X
c
, normalized and transformed by the
T matrix, and the model data are the subset of points
of the complete object M
n
that are the nearest to each
of the scene points. The latest will change at each it-
eration step.
Once the model data subset in a given iteration step
k are established, and assuming that the error e(k) is
still bigger than the finishing error, it is necessary to
determine the transformation matrix that makes min-
imum the error e(k). Solution for the translation part,
the t vector, is obtained from the expression (Forsyth
and Ponce, 2002):
t =
1
n
n
X
i=1
r
i
−
1
n
n
X
i=1
r
0
i
(8)
where r
i
and r
0
i
are the coordinates of the model data
points and scene data points respectively.
With respect to the rotation part, the rotation matrix
R that minimizes the error, we have used the Horn
approximation (Horn, 1988), in which R is formed by
the eigenvectors of the matrix M defined as:
M = P (P
0
)
T
(9)
This approximation gives a closed-form solution
for that computation, which accelerates significantly
the ICP algorithm.
The algorithm just described is applied to the five
candidates selected in the previous phase. The chosen
final transformation matrix will be that one for which
the finishing ICP error given by expression (7) is the
smaller one.
Figure 13 shows the results for the same data points
of figure 11 after application of the ICP algorithm.
Partial view after applying the final transformation
matrix matched over the object and the complete ob-
ject range data are plotted together. Plots from two
different points of view are shown to improve the vi-
sualization of the obtained results.
ICINCO 2004 - ROBOTICS AND AUTOMATION
8

Figure 13: Final results of the overall matching algorithm
visualized from two different points of view
Figure 14: Set of objects used to test the presented algo-
rithm
5 EXPERIMENTAL RESULT
The algorithm proposed in the present work has been
tested over a set of 21 objects. Range data of these ob-
jects have been acquired by means of a GRF-2 range
sensor which provides an average resolution of ap-
proximately 1 mm. Real size of the used objects goes
from 5 to 10 cm. height and there are both polyhedral
shaped and free form objects (see figure 14).
We have used a sphere with 1280 nodes to com-
pute the principal components for the complete ob-
ject. Some tests have been made with a mesh of 5120
nodes, but the associated increment of the computa-
tion time does not bring as a counterpart any improve-
ment in the obtained matching results.
With respect to the multipixel matrix, sizes around
22x22 pixels have empirically given good results. The
matrix size can be critical in the method functionality
because high value implies poor VPV generation, and
low value involves a reduction in the number of range
data points that conform the VPV, making unaccept-
able the principal components computation.
Once the principal components database was gen-
erated for all the considered objects we have checked
the matching algorithm. Three partial views have
been tested for each object, making a total of 63 stud-
ied cases. The success rate has been the 90,67%, what
(a) (b)
(c) (d)
Object 1
(a) (b)
(c) (d)
Object 2
Figure 15: Some results over polyhedral objects of the pro-
posed method
(a) (b)
(c) (d)
Object 3
(a) (b)
(c) (d)
Objeto 4
Figure 16: Some results over free form objects of the pro-
posed method
demonstrates the validity of the method.
The average computation time invested by the algo-
rithm has been 75 seconds, programmed over a Pen-
tium 4 at 2.4 GHz. computer under Matlab environ-
ment. The time for the phase of eigenvalues com-
parison and better candidates’ selection is very small,
around 1 sec. The remaining time is consumed in the
computation of the principal components of the real
partial view and, mainly, in the application of the ICP
algorithm to the five candidates: five times for the di-
rect computation of the R matrix from equation (6),
and another five times due to the direction ambigu-
ity existing in the eigenvectors definition described in
subsection 3.2.
Figures 15 and 16 show the results obtained with
several polyhedral and free-form objects respectively.
Apart from the intensity image of the object, sub-
plot (a) presents the range data of the complete ob-
ject, subplot (b) shows the partial view set of points,
subplot (c) shows the data transformed after eigen-
values comparison, and subplot (d) contains the final
results after ICP algorithm application. Some plots
have been rotated to enhance data visualization.
Finally it is important to remark that the devel-
oped algorithm can handle partial views with auto-
occlusions. Figure 17 shows an example of this case.
PARTIAL VIEWS MATCHING USING A METHOD BASED ON PRINCIPAL COMPONENTS
9

(a) (b)
(c) (d)
Object 4
Figure 17: Results of the method in a free form object with
existence of auto occlusions
6 CONCLUSIONS
A method to find the best matching of a range data
partial view with the complete object range data has
been presented in this work. The method takes ad-
vantage of the principal components concept. The
eigenvalues comparison allows determining the most
probable matching zones among the partial view and
the complete object. The corresponding eigenvectors
are used to compute an initial transformation matrix.
Applying the ICP algorithm refines this one and the
definitive transformation is obtained.
For the comparison purposes a database of prin-
cipal components must be generated in advance. A
procedure has been designed and described to virtu-
ally generate all the possible partial views of a given
complete object and then to compute the associated
principal components. The procedure is based on the
z-buffer algorithm.
The method has been tested over a database con-
taining 21 objects, both polyhedral and free form, in a
63 case study (three different views for each object).
The success rate has been the 90,67%. The method
has proven its robustness to auto-occlusions. Some
improvements can still to be made in a future concern-
ing to the candidate selection step. Several candidates
appear at the same zone and they could be grouped
into the same one for the following step of ICP appli-
cation.
Finally it is important to remark that the pre-
sented method has very good performance in the
shown matching problem but it can also be applied
in recognition applications with similar expected per-
formance.
ACKNOWLEDGEMENTS
This work has been developed under support of the
Spanish Government through the CICYT DPI2002-
03999-C02-02 contract.
REFERENCES
Ad
´
an, A., Cerrada, C., and Feliu, V. (2001a). Automatic
pose determination of 3D shapes based on modeling
wave sets: a new data structure for object modeling.
Image and Vision Computing, 19(12):867–890.
Ad
´
an, A., Cerrada, C., and Feliu, V. (2001b). Global shape
invariants: a solution for 3D free-form object discrim-
ination/identification problem. Pattern Recognition,
34(7):1331–1348.
Besl, P. and McKay, N. (1992). A method for registration
of 3-D shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Campbell, R. J. and Flynn, P. J. (1999). Eigenshapes for 3D
object recognition in range data. In Proc. of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, volume 2, pages 2505–2510.
Forsyth, D. A. and Ponce, J. (2002). Computer Vision: A
Modern Approach. Prentice Hall.
Hebert, M., Ikeuchi, K., and Delingette, H. (1995). A
spherical representation for recognition of free-form
surfaces. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 17(7):681–690.
Higuchi, K., Hebert, M., and Ikeuchi, K. (1994). Merg-
ing multiple views using a spherical representation. In
IEEE CAD-Based Vision Workshop, pages 124–131.
Horn, B. K. (1988). Closed form solutions of absolute ori-
entation using orthonormal matrices. Journal of the
Optical Society A, 5(7):1127–1135.
Mamic, G. and Bennamoun, M. (2002). Representation and
recognition of 3D free-form objects. Digital Signal
Processing, 12(1):47–76.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the ICP algorithm. In Proceeding of the Third Inter-
national Conference on 3D Digital Imaging and Mod-
eling (3DIM01), pages 145–152, Quebec, Canada.
Skocaj, D. and Leonardis, A. (2001). Robust recognition
and pose determination of 3-D objects using range im-
age in eigenspace approach. In Proc. of 3DIM’01,
pages 171–178.
ICINCO 2004 - ROBOTICS AND AUTOMATION
10
