
VISION-BASED HAND GESTURE RECOGNITION FOR HUMAN-
ROBOT INTERACTION
Md. Hasanuzzaman*, M.A. Bhuiyan***, V. Ampornaramveth*, T. Zhang*, Y. Shirai**, H. Ueno*
*Intelligent System Research Division, National Institute of Informatics, 2-1-2 Hitotsubashi, Chiyoda-ku, Tokyo 101-8430,
Japan; **Department of Computer Controlled Mechanical Systems, Osaka University, Suita, 565-0871 Japan;
***Jahangirnagor University, Dhaka-1342, Bangladesh.
Keywords: Computer vision, Hand gesture, Human-robot interaction (HRI)
Abstract: This paper presents a vision-based hand gesture recognition system for interaction between human and
robot. A real-time two hands gestures recognition system has been developed by combining three larger
components analysis based on skin-color segmentation and multiple features based template-matching
techniques. Gesture commands are generated and issued whenever the combinations of three skin-like
regions at a particular frame match with the predefined gestures. These gesture commands are sent to robots
through TCP-IP network for human-robot interaction. A method has also been proposed to detect left hand
and right hand relative to face position, as well as, to detect the face and locate its position. The
effectiveness of our method has been demonstrated over the interaction with a robot named ROBOVIE.
1 INTRODUCTION
As robots increase in capabilities and are able to
perform more humanoid tasks in an autonomous
manner, we need to think about the interaction that
human will have with robots. There are several ways
to communicate with human being and intelligent
machine (e.g. robot, vehicle, etc,), with text
commands, speech commands, gesture commands,
and so on. Text commands based approach is robust
but it is not natural compared to human-human
communications. Although verbal commands based
human-robot interaction system is employed based
on few key words (such as move left, move right,
stop, etc.) there are so many difficulties to generalize
human speech. In this paper we present a method of
developing a gestures based nonverbal interaction
system between robots and human being. So our first
attention is focused on vision based hand gesture
recognition and then to interact with robot using
gesture commands.
Two approaches are commonly used to interpret
gestures for human machine interaction. One is
gloved based approach (Vladimir, 1997) that
requires wearing of cumbersome contact devices and
generally carrying a load of cables that connect the
device to a computer. Another approach is vision
based technique that does not require wearing any of
contact devices with human body part, but uses a set
of video cameras and computer vision techniques to
interpret gestures. Gesture recognition based on
vision technology has been emerging with the rapid
development of computer hardware of vision system
in recent years and in future it will dominate in both
Human-Computer and Human-Robot interactions.
For gesture interpretation system gestures modelling
is the first step that mainly depend on the intended
application of those gestures. Gesture modelling can
follow appearance based or model based approach.
Model based approach is very hard to implement in
real time because they usually use very complicated
algorithms to extract accurate joint angles. An
appearance-based algorithm is a strong tool for
object recognition. Here, a variety of object
appearances are stored as a statistical model and
used in the recognition task. The gestures are
modelled by relating the appearance of any gesture
to the appearance of the set of predefined, template
gestures. In this work we have used appearance base
model.
Takahiro Watanabe et. al. (Watanabe, 1996)
used maskable template based on minimum distance
between template and partial block of an input
image for gesture recognition. Hitoshi Hongo et. al.
(Hongo, 2000) has developed a system that can track
multiple faces and hands by using multiple cameras
to focus on face and gesture recognition. Akira
Utsumi et. al. (Utsumi, 2002) detected hand using
hand shape model and tracked using extracted color
440
Hasanuzzaman M., A. Bhuiyan M., Ampornaramveth V., Zhang T., Shirai Y. and Ueno H. (2004).
VISION-BASED HAND GESTURE RECOGNITION FOR HUMAN-ROBOT INTERACTION.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 440-445
DOI: 10.5220/0001137904400445
Copyright
c
SciTePress
and motion. They also used multiple cameras with
individual processor.
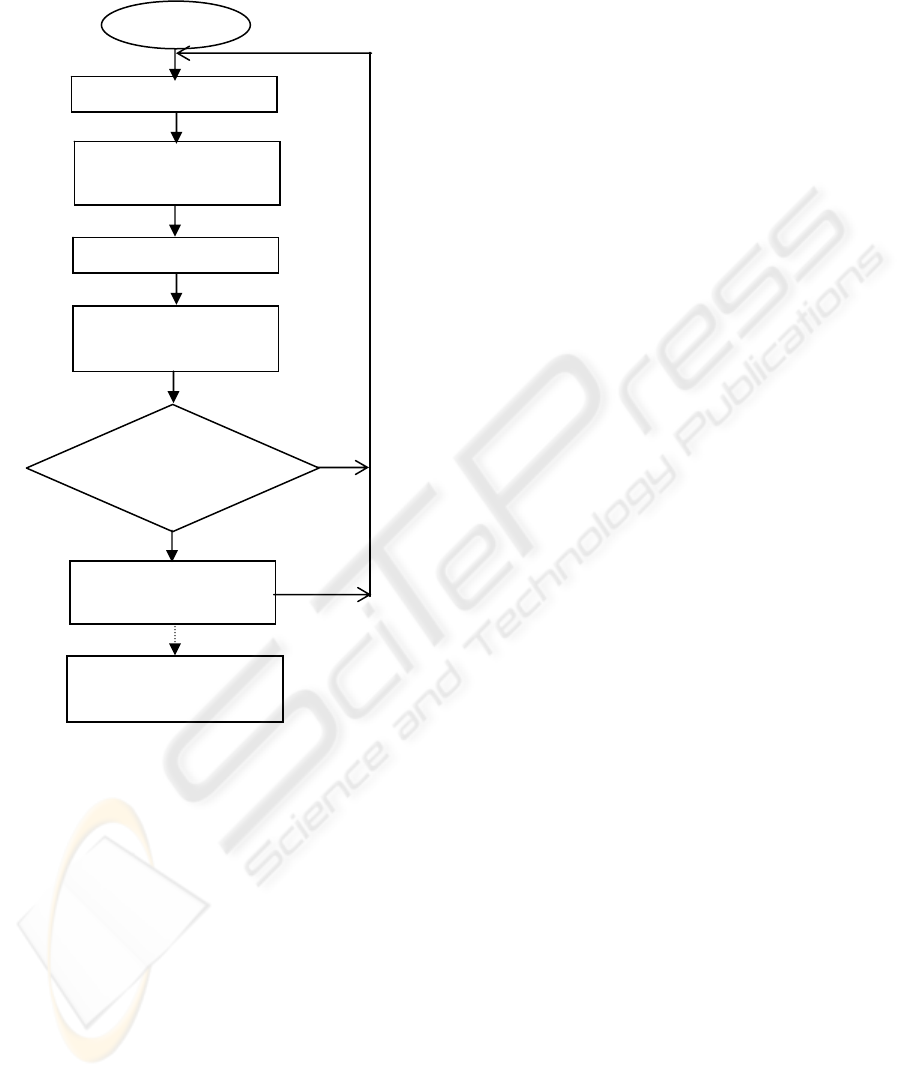
Figure 1: Flowchart of gesture based human robot interaction
In this paper we present a simple and faster
method for recognizing gestures with skin-color
segmentation and multiple features-based template
matching techniques as shown in Figure 1. In this
method three larger skin like regions are segmented
from the input images assuming that a face and two
hands may be present in the image frame at the same
time. Skin-like region is segmented using color
segmentation technique from YIQ color space.
Segmented blocks are normalized and compared
with template images for finding best match. For
template matching we have used combination of two
features: correlation coefficient and minimum
(Manhattan distance) distance qualifier. If the
combinations of three skin-like regions at a
particular frame match with our predefined gesture
then corresponding gesture command is generated.
In this experiment we have recognized three gestures,
TwoHand, LeftHand and RightHand as shown in
Figure 2. Gesture commands are being sent to robots
through TCP-IP network and their actions are being
accomplished according to users defined action for
that gesture. A method has also been developed to
detect left hand and right hand relative to face
position, as well as, to detect the face and locate its
centre position. As an application of our method, we
have implemented real time human-robot interaction
systems using a robot named ROBOVIE with the
commands, such as: “Raise Two Arms”, “Raise Left
Arm” and “Raise Right Arm”, according to three
gestures TwoHand, LeftHand and RightHand
respectively.
The remainder of this paper is organized as
follows. In section 2, we have briefly described skin-
like regions segmentation, filtering, normalization,
multiple feature based template-matching techniques
for face and hand pose detection and gestures
recognition system. Section 3 presents our
experimental results and discussions. Section 4 we
concludes this paper.
2 HAND GESTURE
RECOGNITION
Figure 1, shows the hand gesture recognition system
flowchart. This system uses video camera for data
acquisition. The system first segmented into three
larger skin-like regions by using skin-color
information from the input images. The selected
skin-like regions are normalized and resized as
template size in order to match with templates. The
gestures are recognized according to matching
results of three segmented blocks at a particular
image frame.
2.1 Skin Color Segmentation,
Filtering and Normalization
This section introduces a color segmentation based
approach for determining skin parts (mainly face and
hands) from color images. YIQ (Y is luminance of
the color, I, Q chrominance of the color) color model
is used for skin color segmentation, since color
footprint is more distinguishable and less sensitive to
illumination changes in the YIQ space than the
standard RGB color space. YIQ color representation
system is typically used in video coding and
provides an effective use of chrominance
information for modelling the human skin color.
N
Y
Star
t
Data ac
q
uisition
3 larger skin-like
regions seg.
N
ormalization
Corr. coefficent. &
minimum distance
Corr-coef>th1
AND
Min-dist<th2
Gesture Command
Generation
Robot
VISION-BASED HAND GESTURES RECOGNITION FOR HUMAN-ROBOT INTERACTION
441

Figure 2: a) TwoHand, b) LeftHand, c) RightHand
gestures
To detect hands or face regions, the RGB image
taken by video camera is converted to YIQ color
representation system and threshold it by the skin
color range (Bhuiyan, 2003). Values of Y and I play
an important role to distinguish skin like regions
from non-skin like regions. Values of Y and I vary
on person’s body colors as well as lighting
conditions. If body color is black then Y and I values
decrease and if body color is white then Y and I
values increase. We have computed our threshold
values using several persons from Bangladesh, Japan,
China and Thiland.
Figure 3: Output of skin color segmentation and
normalization
.
We have included an off-line program to
calculate threshold values of Y and I if person’s
color and lighting condition is not fitted with current
threshold values. In that case we need to select skin
part of the new person from the images and run our
threshold calculation program, then it will give the
threshold values of that person and we update our
threshold values accordingly in system. Locations of
the probable hands and face are determined from the
image with three larger connected regions of skin-
colored pixels. In this experiment, 8-pixels
neighbourhood connectivity is employed. In order to
remove the false regions from the isolated blocks,
smaller connected regions are assigned by the values
of black-color. Noise and holes are filtered by
morphological dilation and erosion operations.
Normalization is done to convert the segmented
Figure 4: Sample template images
images to gray images and the image is resized as
template images size. Sample output of the skin-
color segmentation and normalization part are
shown in Figure 3, where lower part squares show
the resized images. Red points on the image shows
the centre points or location of each segmented
region. If hand or face is detected then
corresponding centre point is used as the hand and
face location.
2.2 Face and Hand Detection Using
Template Matching
As template-matching approach is a more natural
approach of pattern recognition, we use it to
recognize gesture from an unknown input image.
First we have prepared noise free version of faces
and hands palm of different persons in different
lighting conditions as template images as shown in
Figure 4. To support small rotation we have included
some slightly rotated images within our template
images. For template matching we have considered
two features: one is maximum correlation coefficient
and another is minimum distance classifier
(Manhattan distance) between two same size images.
Correlation coefficient is calculated using following
equation,
/
ttt
M
P
α
=
(0<α
t
≤1) (1)
where M
t
is total number of matched pixels (white
pixels with white pixels and black pixels with black
pixels) with t-th template, P
t
is number of total
pixels in t-th template and t is a positive number. For
exact matching
α
t
is 1, but for practical environment
we have chosen threshold for
α
t
through experiment
for optimal matching.
Minimum distance can be calculated by using
following equation,
ICINCO 2004 - ROBOTICS AND AUTOMATION
442

1
{| |}
xy
tt
I
G
δ
×
=−
∑
(2)
where, I(x, y) is the input image and G
1
(x,y),
G
2
(x,y),----------,G
t
(x,y) are template images. There
are more than one way to define
t
δ
corresponding to
different ways of measuring distance. Two of the
most common are: Euclidean metric and Manhattan
metric. In our experiment we have used Manhattan
metric. For exact matching
t
is 0 (zero) but for
practical purpose we have used a threshold value
through experiment for finding optimal matching.
We have combined output of these two matching
methods to make our system more accurate to
recognize gestures. In our method we have grouped
template images as face class (C
1
), left hand class
(C
2
) and right hand class (C
3
). Face class includes
different person’s frontal faces with some of them
slightly rotated. Left hand class includes left hand
palms and right hand class include right hand palms
(frontal) of different persons. If max {
α
t
}>th
1
is
true
then corresponding class (C
α
) is identified, similarly
if min {
t
}<th
2
is true then corresponding class (C
)
is identified, where th
1
and th
2
are thresholds for
correlation coefficient and minimum distance
qualifier respectively. If both methods identified the
same class then corresponding class is detected,
otherwise ignored. Using similar way detected poses
for three segments from an image and calculate face
and hands location from the centre coordinates of
Figure 5: Sample output for two hands gesture
2.3 Gesture Recognition
In this experiment we have recognized static gesture
for human robot mimic operations that means robot
imitates human actions. Gestures are recognized
using rule-based system from the combinations of
pose detection output of three segments for a
particular image frame. If two hands and one face
are present in the input image then the system
recognizes it as “TwoHand” gesture. If one face and
one hand are present in the input image frame then
the system recognizes it as either left hand or right
hand depending on its position with respective to
face position using following equation,
x
x
fh
ε
=
− (3)
where, f
x
is the x-coordinate of the centre position of
face segment and h
x
is the x-coordinate of the centre
position of hand segment (when one hand is present).
If the distance is negative then it is detected as
right hand gesture (RightHand) and if it is positive
then it is detected as left hand gesture (LeftHand).
According to the gesture recognized, corresponding
gesture command is generated and transferred to
interact with robot through TCP-IP network. Our
approach has been implemented on a communicative
humanoid robot named ROBOVIE. The commands
employed for the interaction are, “Raise Two Arms”,
“Raise Left Arm” and “Raise Right Arm”
corresponding to gestures “TwoHand”, “LeftHand”
and “RightHand”.
3 EXPERIMENTAL RESULTS AND
DISCUSSION
This section describes experimental procedures, as
well as experimental results of the gestures
recognition system and human-robot interaction
system. This system uses a standard video camera
for image acquisition. Each captured image is
digitized into a matrix of
320 240× pixels with 24-
bit color. First we have prepared pure templates. All
the templates are of
60 60
×
pixels gray image. The
template images are consisted a total of 180 frontal
images of faces, left hands and right hands of
different people. Figure 4 shows example template
images. We have tested our system for real time
input images. The sample visual output of our
gesture recognition system is shown in Figure 5 for
the “TwoHand” gesture.
Figure 6: Architecture for human-robot interaction
Gestures
recognition
software in PC
Camera
R
obov
i
e
VISION-BASED HAND GESTURES RECOGNITION FOR HUMAN-ROBOT INTERACTION
443

a) Raise two arms (TwoHand)
b) Raise left arm (LeftHand)
c) Raise right arm (RightHand)
Figure 7:
Sample outputs a), b) and c) corresponding to gestures
TwoHand, LeftHand and RightHand
It also shows gesture command at the bottom side
text box corresponding to matched gesture. In case
of no match, it shows “no matching found”.
We have also made a comparison among the
correlation coefficient based, the Manhattan distance
based and their combinations based templates
matching approaches for sample still input images
(Table-1). In this table E
m
, is the total number of
wrong detection using Manhattan distance, E
cc
is the
total number of wrong detection using correlation
coefficient and E
com
is the total number of wrong
detection using their combination. From the table we
conclude that using combinations of two features we
can remove errors of two separate methods. In this
case we have considered five gestures such as ONE,
TWO, THREE, FOUR and FIVE and used five
template classes corresponding to those gestures as
shown in second row in Figure 4.
Table 1: Comparison of two template based methods
Gesture No.of
Inputs
E
m
E
cc
E
com
1 25 4 0 0
2 25 2 1 0
3 20 3 0 0
4 20 2 1 0
5 20 0 0 0
In this part we have explained a real time
human-robot (ROBOVIE) interaction system using
recognization gestures. We have implemented this
application by off-board configuration that means
gesture recognition program was run in client PC,
not in ROBOVIE as shown in Figure 6. We have
considered our robot as a server and our PC as a
client. Communication link has been established
through TCP-IP protocol. Initially, we connected the
client PC with ROBOVIE server and then gestures
recognition program was run in the client PC. As a
result the client PC sends gesture commands to the
robot (ROBOVIE) through TCP-IP protocol and it
acted according to users predefined actions. The
results of our interaction program are shown in
Figure 7, for “Raise Two Arms”, “Raise Left Arm”
and “Raise Right Arm” in accordance with gesture
TwoHand, LeftHand and Right Hand respectively.
After completing each mimic operation the robot
goes to its initial position. We have considered for
human-robot interaction that gesture command will
be effective until robot finishes corresponding action
for that gesture.
4 CONCLUSIONS
This paper describes a real-time hand gesture
recognition system using skin color segmentation
and multiple features based template-matching
techniques. For the matching algorithm we have
used combinations of minimum distance qualifier
(Manhattan distance) and correlation coefficient
based matching approaches, that’s why it is more
robust than any single feature based template-
matching techniques. One of the major constrain of
this system is that the background should be non-
skin color substrate. If we use infrared camera then
it is possible to overcome this problem just by a little
ICINCO 2004 - ROBOTICS AND AUTOMATION
444

modification of our segmentation module, other
modules will remain the same.
We have also successfully implemented simple
gestures based human-robot interactive system for
mimic operation, using a robot named ROBOVIE.
We believe that vision system will replace attached
physical sensors for human robot interaction in the
near future. A particular user may assign distinct
commands to specific hand gestures and thus control
various intelligent robots using hand gestures.
The significant issues in gesture recognition for
our method are the simplification of the algorithm
and reduction of processing time in issuing
commands for the robot. Our next step is to make
the detecting system more robust and to recognize
dynamic facial and hand gestures for interaction
with different robots such as AIBO, ROBOVIE,
SCOUT, MELFA, etc. Our ultimate goal is to
establish a symbiotic society for all of the distributed
autonomous intelligent components so that, they
share their resources and work cooperatively with
human beings.
REFERENCES
Vladimir I. Pavlovic, 1997. Visual Interpretation of Hand
Gestures for Human-Computer Interaction: A Review.
IEEE PAMI, Vol. 19, No. 7, pp. 677-695.
Watanabe, T., 1996. Real-Time Gesture Recognition
Using Maskable Template Model. Proc. of the
International Conference on Multimedia Computing
and Systems (ICMCS’96), pp. 341-348.
Hongo, H., 2000. Focus of Attention for Face and Hand
Gesture Recognition Using Multiple Cameras.
AFGR00, IEEE, pp. 156-161.
Matthew, T., 1991. Eigenface for Recognition. Journal of
Cognitive Neuroscience, Vol. 3, No.1, pp. 71-86.
Utsumi, A., 2002. Hand Detection and Tracking using
Pixel Value Distribution Model for Multiple-Camera-
Based Gesture Interactions. Proc. of the IEEE
workshop on knowledge Media Networking
(KMN’02), pp. 31-36.
Bhuiyan, M. A., 2003. Face Detection and Facial Feature
Localization for Human-machine Interface. NII
Journal. Vol. 5, pp. 25-39.
Huang, Yu, 2002. Two-Hand Gesture Tracking
Incorporating Template Warping With Static
Segmentation. AFGR’02, IEEE, pp. 260-265.
Bretzner, L., 2002. Hand Gesture Recognition using
Multi-Scale Colour Features, Hierarchical Models and
Particle Filtering. AFGR’02, IEEE pp. 423-428.
Bhuiyan, M. A., 2004. ON TRACKING OF EYE FOR
HUMAN-ROBOT INTERFACE. International
Journal of Robotics and Automation, Vol. 19, No. 1,
pp. 42-54.
Shimada, N., 1996. 3-D Hand Pose Estimation and Shape
Model Refinement from a Monocular Image Sequence.
Proc. of VSMM’96 in GIFU, pp.23-428
Grzeszczuk, R., 2000. Stereo Based Gesture Recognition
Invariant to 3D pose and lighting. CVPR’00, IEEE, pp.
1826-1833.
Yunato, Cui, 1996. Hand Segmentation Using Learning-
Based prediction and verification for hand Sign
Recognition. Proc. of the Conference on Computer
Vision and pattern Recognition (CVPR’96), IEEE, pp.
88-93.
Yoichi Sato, 2000. Fast Tracking of hands and Fingertips
in Infrared Images for Augmented Desk Interface.
AFGR’00, IEEE, pp. 462-467.
Charles, J., 2001. A Basic Hand Gesture Control System
for PC Applications. Proc. of the 30th Applied
Imagery Pattern Recognition Workshop (AIPR’01),
IEEE, pp. 74-79
Dong, Guo, 1998. Vision-Based Hand Gesture
Recognition for Human-Vehicle Interaction. Proc. of
the International conference on Control, Automation
and Computer Vision, Vol. 1, pp. 151-155.
VISION-BASED HAND GESTURES RECOGNITION FOR HUMAN-ROBOT INTERACTION
445
