
FUZZY CONTROL FOR FABRICS DRYING ON AN INDUCTION
HEATED ROTATING CYLINDER:
Experimental results
Sergio Pérez, Zulay Niño
Departamento de Ingeniería Química, Facultad de Ingeniería, Universidad de Carabobo, Valencia, Venezuela
Normand Thérien, Arthur D. Broadbent
Departement de Génie Chimique, Faculte de Génie, Université de Sherbrooke, Sherbrooke, Québec, Canada
Keywords: Textile contact drying, Fuzzy logic control, Heating by induction
Abstract: The removal of water from materials in textile industry and pulp and paper industries requires a high-energy
consumption, increasing significantly the operating costs. Nevertheless, electromagnetic induction heating is
an alternative with considerable potential for the thermal treatment of materials. Specifically, heating the
surface of a metallic cylinder by electromagnetic induction has opened up a range of applications for
continuos heating, pre-drying and drying of fibrous web. Otherwise, these news electrotechnologies with
industrial applications have to be used under controlled operational conditions. The past few years
witnessed a rapid growth in the use of fuzzy logic controllers for the control of processes, which are
complex and ill defined. These control systems are inspired by the approximate reasoning capabilities of the
process operator. The purpose of this paper is to improve and apply an digital control structure on the basis
of fuzzy logic technique for the textile drying using a rotational cylinder heated by electromagnetic
induction, manipulating the power supply to the inductors to control the exit humidity of the web. The
proposed fuzzy logic controller was tested experimentally in a dryer pilot-scale plant and the results show
the capability of the controller to reach the set point initially fixed at 20 g water/100 g dry fabric. Once
reached the set point, continuing the trial, steps changes of the web-cylinder contact surface and the set
point were done and the results shows the capacity of the proposed fuzzy logic controller in both
perturbations.
1 INTRODUCTION
Energy saving and product quality are among the
main concerns in industry today. It is well known
that the removal of water from materials in the
textile and pulp and paper industries requires a high-
energy consumption, significantly increasing the
operating costs. Many attemps have been made to
minimize energy cost. Nevertheless, the available
new technologies, such as infrared (Dhib, 1994;
Slitine, 1994), micro-wave and radio-frequency
(Cross et al., 1982; Jones, 1992) allow a more
efficient use of energy with a better product
quality. Among these techniques, the electro-
technology processes using infrared, microwave, and
radio frequency has proven to be effective in the
drying of fabrics. Among electro-technologies,
electromagnetic induction is worth mentioning. As
described by Tokuden (1995), this process utilizes a
metal cylinder heated by electromagnetic induction.
The induced energy is transmitted directly to the
fabric or fibrous material to be dried, and can be
regulated by manipulating the power supply to an
electro magnetic inductor (Perez et al., 2001).
The past few years have witnessed a rapid
gr
owth in the use of fuzzy logic controllers for the
control of processes that are complex and ill defined.
These control systems, inspired by the approximate
reasoning capability of humans under conditions of
uncertainty, consist of linguistic if-then rules. For
any reasonably complex chemical process, the
number of rules required to ensure adequate control
may be extremely large. In this paper, a fuzzy
controller based on the strategy proposed by Takagi
and Sugeno (Passino et al., 1998) was developed to
control the exit humidity of the web for a continuous
textile drying process, using the power supply to the
electrical inductors as the manipulated variable.
334
Pérez S., Niño Z., Thérien N. and D. Broadbent A. (2004).
FUZZY CONTROL FOR FABRICS DRYING ON AN INDUCTION HEATED ROTATING CYLINDER: Experimental results.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 334-337
DOI: 10.5220/0001140303340337
Copyright
c
SciTePress
2 EXPERIMENTAL SETUP
The experimental unit consist of an a small-scale
dryer by contact rotating cylinder heated by
electromagnetic induction. The external and internal
diameters of the cylinder are 457 mm and 448 mm,
respectively, and the width 358 mm. Three inductors
placed over the entire cylinder width are used to heat
the cylinder. The possibles manipulated variables in
the experimental unit are: the electrical power
supply; the rotational speed of the cylinder; and the
position of the movable roller that allows
adjustement of the surface area of the web in contact
with the heated cylinder.
The surface area of the web in contact with the
cylinder is adjusted by means of two rollers one
which is movable. The maximun and minimun
surface between the movable roller and the fixed
roller are 1618 cm
2
y 472 cm
2
, respectively.
The temperature inside the cylinder wall are
measured by three T-type thermocouples placed at
different depths in the wall. A contact thermocouple
J-type is placed at the inlet drying section to measure
the cylinder temperature at this fixed point.
The data acquisition and control are done by a
Hewlett-Packard interface (HP-4848) and a HP
VECTRA micro-computer,
which allow for on-line
measurements of the fabric humidity at the entrance
and exit of the dryer using a radio frequency-
humidity sensor. An optical pyrometer senses the
temperature of the fabric at the exit.
3 FUZZY LOGIC CONTROLLER
The development of a Fuzzy Logic Controller (FLC)
involves appropriate definitions of the input and
output variables, a number of linguistic terms and
their membership functions, the rules base, the
inference mechanism, and a defuzzification method.
The proposed controller, has two inputs
variables: the error (e) and the error velocity (v). The
two inputs (e and v) are used in the FLC to obtain a
value of the output variable, the power supply to the
inductors.
For each input variable, the error and the error
velocity, were adopted five fuzzy linguistic
attributes, so that there were 25 possible fuzzy
states, each which implied one defined control
action. These rules are of the folowing type: if the
error is negative high (NH) and the error velocity is
negative low (NL), then the response of the output
is high energy increasing (HEI). The Table 1 show
these fuzzy states and the decision matrix.
Table 1: Labels defined for the inputs variables
Error velocity
NH NL ZERO PL PH
NH LEI HEI HEI HEI HEI
NL HED STOP LEI LEI HEI
ZERO LED STOP STOP STOP LEI
PL HEI STOP LED LED HED
Error
PH LED HED HED HED HED
The control action implied by each rule was then
invoked in proportion to the compatibility of the
measured fuzzy state with the antecedent of the
relevant fuzzy rule; this later operation was done by
determining the membership value of the
instantaneous error value and the velocity error. For
this particular controller, the so-called Π-function
(Yamakawa, 1992) has been used.
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
=
n
W
bx
x
)(2
1
1
)(
µ
(1)
The Table 2 present the parameters values for the
membership functions defined for the inputs and
output variables.
In the inference step the elements of the output
fuzzy set become activated. In this work this is made
according to the folowing process: the elements of
the input fuzzy sets having µ function greater than
zero are paired one element of the error (e) variable
set to one element of the error velocity (v), making
all posibles combinations. Looking at the rules,
defined previously, to each pair corresponds an
element of output the fuzzy set.
The truth value of this output element will be
calculated using the inference method named sum-
product. If any one of the output fuzzy set elements
is activated more than once, its final µ function value
will be the sum of alls the activated µ
functions of
this element.
FUZZY CONTROL OF FABRICS DRYING ON AN INDUCTION HEATED ROTATING CYLINDER: Experimental
results
335

Table 2: Parameters for the memberships functions
Error membership funtion
Fuzzy State b W n
NH -3 3 8
NL -1 1 4
ZERO 0 0.5 2
PL 1 1.5 4
PH 3 2 8
Error velocity membership funtion
Fuzzy State b W n
NH -10 4 8
NL -4 2 4
ZERO 0 1 2
PL 4 2 4
PH 10 4 8
Power supply membership funtion
Fuzzy State b W n
HEI -3 3 8
LEI -1 1 4
STOP 0 0.5 2
LED 1 1 4
HED 3 3 8
In the defuzzification stage a numerical final output
value is obtained through the center-average
defuzzification method.
4 EXPERIMENTAL RESULTS
The objective of this stage is to implement the
proposed Fuzzy Logic Controller using the pilot-
plant cylinder dryer so as to control the exit web
humidity by actuating the power supplied to the
inductors.
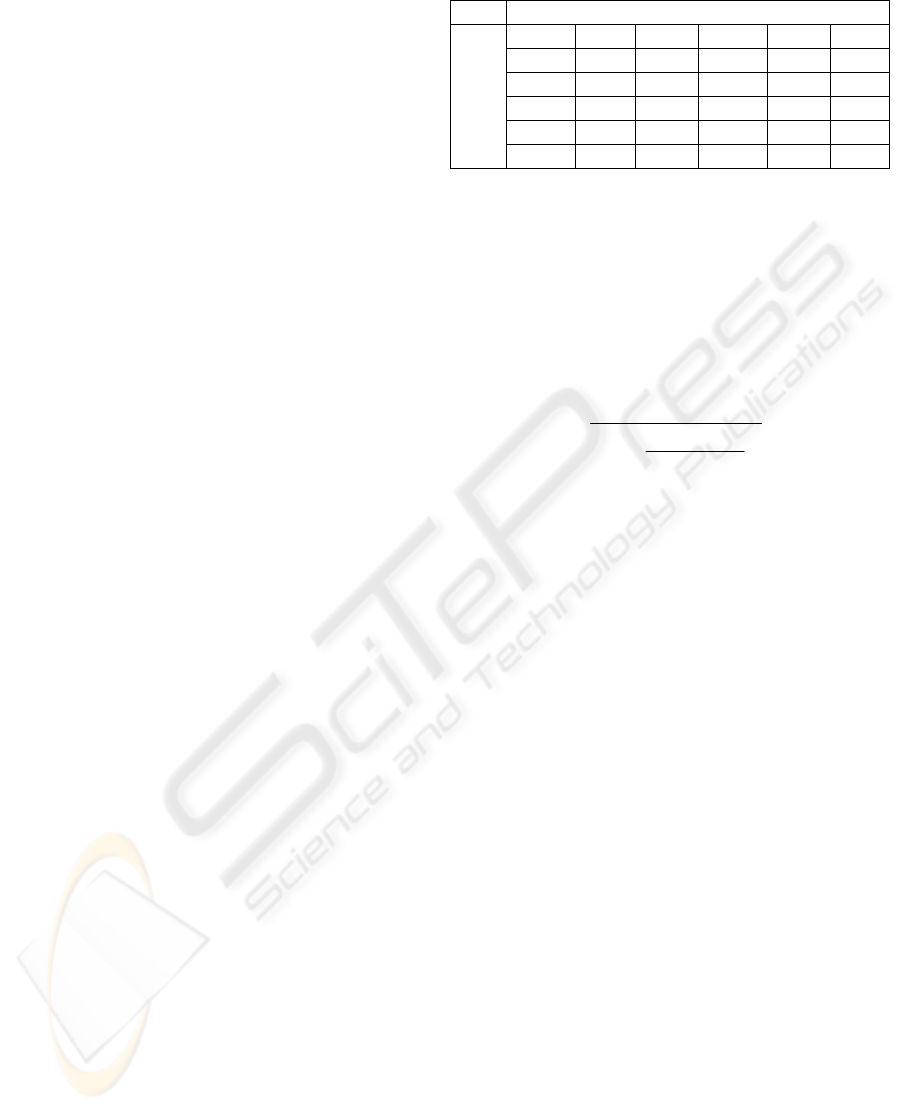
The trial initially involved manual operating
conditions leading to a preliminary decrease in web
humidity during drying by using a cylinder
rotational speed of 1.7 rev/min., a power supply of
2.42 kW and the maximun degree of web-cylinder
surface contact (1618 cm
2
). This startup step for the
process takes about 26 min. Figure 1 shows the
operational variables measured on line during the
complete trial: the cylinder temperature and the web
humidity at the inlet of the drying section, the
temperature of the fabric at the exit of the drying
section, and the cylinder rotational speed. Once
steady–state conditions were achieved, the process
was changed to automatic mode and a set point for
the exit web humidity fixed at 20 g water/100 g dry
fabric. From this moment on, the process is under
the Fuzzy Logic Controller action.
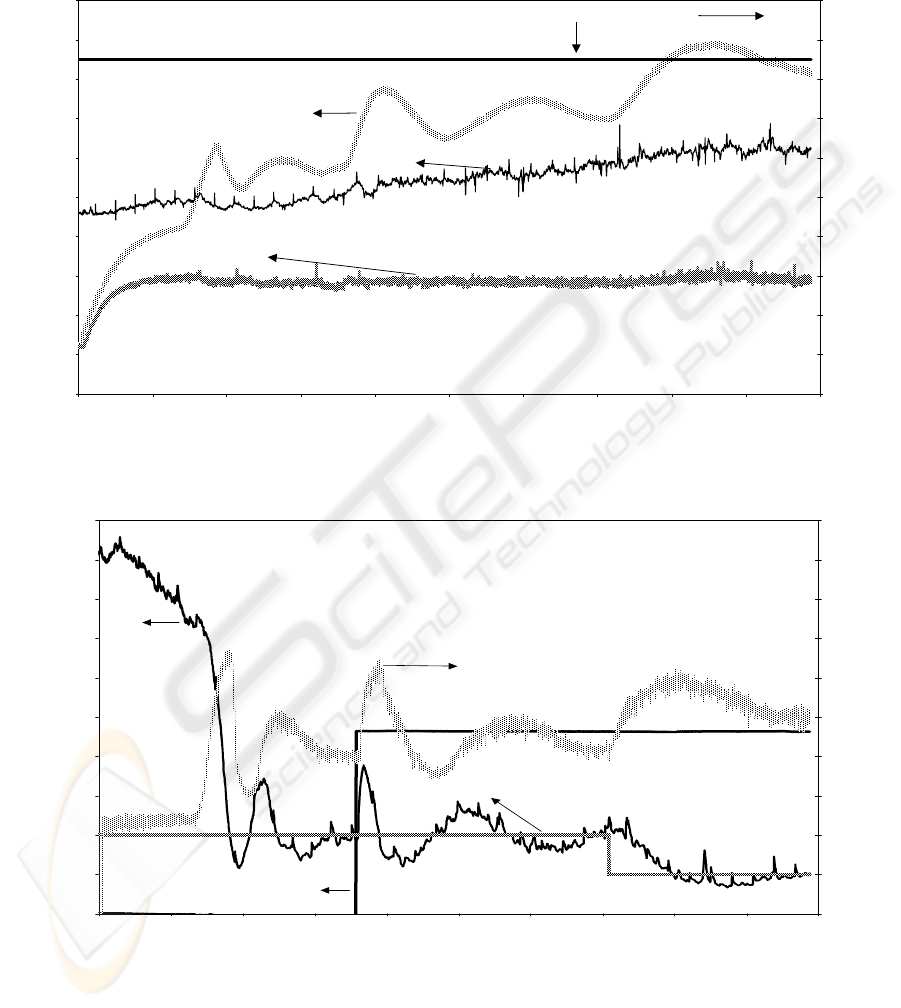
In first stage of the process control, as shown in
Figure 2, an important increase of the power
supplied to the inductors is observed generating an
immediate increase in the cylinder temperature, and
consequently a fabric with a low exit humidity.
From these conditions of over-drying, a reduction of
the power is observed. In this early stage, the web
humidity oscillates around the set point of 20 g
water/100 g dry fabric and the controller takes
approximately 45 min. to control the exit web
humidity to the set point.
Once the set point value is attained, a step
perturbation was made changing the position of the
movable roller, decreasing the contact web-cylinder
surface. From this second stage of the trial, there is
an immediate increase of the web humidity
following a reduction in the area of web-cylinder
contact (or reduction of the drying time).
The fuzzy logic controller responds by increasing
the power supplied to the inductors but the same
previous oscillatory dynamic of the exit web
humidity is observed tending towards the set point.
In the last stage of the trial, a set point change was
made, changing the value from 20 to 10 g water/100
g dry fabric. Figure 6 shows the dynamic reponses,
for the controlled and manipulated variables and as
in the previous stages, the web humidity tends
towards the new set point
.
5 CONCLUSIONS
A Fuzzy Logic Controller was used with success to
control a complex process, like the drying of a fabric
by contact with a rotating cylinder heated by
electromagnetic induction. The performance of the
controller was tested using a pilot scale dryer and a
stable reponse was observed when the process was
perturbed with changes in the operational conditions
and in the set point for the exit web humidity.
REFERENCES
Dhib, R., 1994. Modelisation, simulation et côntrole
numérique d’un procédé de séchage par rayonnement
infrarouge, Thèse de doctorat, Université de
Sherbrooke, QC.
Jones, P.L. 1992. Electromagnetic wave energy in drying
process. In drying 92, A.S. Mujumdar, Ed. Elsevier,
Amsterdam, pp. 115-136.
Passino K.M., S. Yurkovich. 1998. Fuzzy Control,
Addison-Wesley Longman Inc., Menlo Park,
California.
Pérez S., N. Thérien and A.D. Broadbent. 2001. Modelling
the continuous drying of a thin sheet of fibres on a
cylinder heated by electric induction. Can. J. Chem.
Eng. 79, 977-989.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
336
Slitine, M.D., 1994. Identification et commande en temps
réel d’un procédé de séchage par radiation infrarouge,
thèse de doctorat, Université de Sherbrooke, QC.
Yamakawa, T., 1992. A fuzzy logic controller. J.
Biotechnol. 7, 1-32
0
20
40
60
80
100
120
140
160
180
200
0 20 40 60 80 100 120 140 160 180 200
Time (min.)
Web Humidity (g water/100 dry fabric) and Temperatures (C)
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
Cylinder rotational speed (rev/min.)
Exit temperature of the fabric
Temperature of the cylindre
at the inlet drying section
Cylinder rotational speed
Inlet web humidity
Figure 1: Operational variables during the trial.
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100 120 140 160 180 200
Time (min.)
Web Humidity (g water/100 g dry web)
0
1
2
3
4
5
6
7
8
9
10
Power supply (kW)
Power supply to inductors
M ovable roller position
Exit web
hum idity
W eb Humidity Set point
Figure 2: Variables manipulated, controled and perturbations during the trial.
FUZZY CONTROL OF FABRICS DRYING ON AN INDUCTION HEATED ROTATING CYLINDER: Experimental
results
337
