
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS
Fei Hao, Fei Xia, E. Graeme Chester, Alex Yakovlev, Ian G. Clark
School of Electronic, Electrical and Comuter Engineering, University of Newcastle upon Tyne
Keywords: ACM, MATLAB, Stateflow, Distributed Control
Abstract: Asynchronous communication mechanisms (ACMs) are poten
tially useful in systems with heterogeneous
timing as data connectors between processes belonging to different timing domains. In distributed,
concurrent and embedded digital systems, there is often a desire to have some temporal decoupling between
different parts of a system. ACMs provide a means with which concurrent processes can communicate with
one another and yet still avoid synchronization. This paper describes efforts to implement MATLAB-based
models of existing ACM algorithms. These techniques will facilitate the inclusion of ACMs in such
application fields as distributed control and signal processing systems.
1 INTRODUCTION
Inter-process asynchrony is inevitable for
computation networks in the future, firstly because
different and diverse functional elements, especially
those connecting to analogue domains, tend to have
different timing requirements (Kelly et al 2003,
Simpson 2003), and secondly because concurrent
and distributed system implementations lead to
greater asynchrony between components as
semiconductor technology advances and the degree
of integration increases (ITRS 2003 “Design”
document emphasizes multiple clock domains and
source-synchronous signalling and predicts networks
of self-timed blocks). The size of computation
networks is becoming larger, and the traffic between
the processing elements is increasing. Handling the
data communications which make up the traffic,
therefore, may determine much of the performance
and characteristics of such systems.
In truly distributed system
s such as sensor
networks (Kelly et al 2003, Min et al 2001)[1, 4],
there is often a desire to have temporal decoupling
of various kinds between digital processes. For
instance, parts of a distributed control system may
consist of control laws mapped onto hardware
embedded into parts of the plant environment, whilst
the higher hierarchies of the system may be
implemented with software running in general
purpose processors which are shared multitasking
units. It can be very important to have temporal
decoupling between these two parts of the control
algorithm at the hardware level because of such
reasons as avoiding deadlock propagation through
the system, the desire to have low power
characteristics in remote and battery powered units,
the physical impossibility of keeping everything
synchronized in distributed systems, different parts
of a system requiring radically different processing
speeds, etc.
Asynchronous communication mechanisms
(AC
Ms) have been investigated since the 1980s and
have by now developed into a coherent field
including classification, specification, and
techniques for implementation, analysis and
verification (Simpson 2003, Xia et al 2002). ACMs
are potentially useful in systems with heterogeneous
timing as data connectors between processes
belonging to different timing domains, which may
exist either out of necessity or desirability. They can
also be useful as digital mimics for various types of
data connections in analogue systems, with different
types of ACMs suiting different data requirements.
ACM classification was successfully expanded to
include types providing more qualitative asynchrony
and richer data properties than the traditional FIFO
buffer. This made it clear that these applications can
be envisaged. The successful work in synthesis and
verification of implementations made them practical
(Simpson 2003, Xia et al 2002).
An ACM, as defined here, is a connector
b
etween two asynchronous processes, a writer and a
reader, through which a sequence of data items can
be passed (Simpson 2003, Xia et al 2002) [2, 5]. The
general scheme of these kinds of data
communication mechanisms is shown in Figure 1.
Most ACM implementations tend to include shared
memory, accessible to both writer and reader, for the
54
Hao F., Xia F., Chester G., Yakovlev A. and Clark I. (2004).
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 54-61
DOI: 10.5220/0001141700540061
Copyright
c
SciTePress
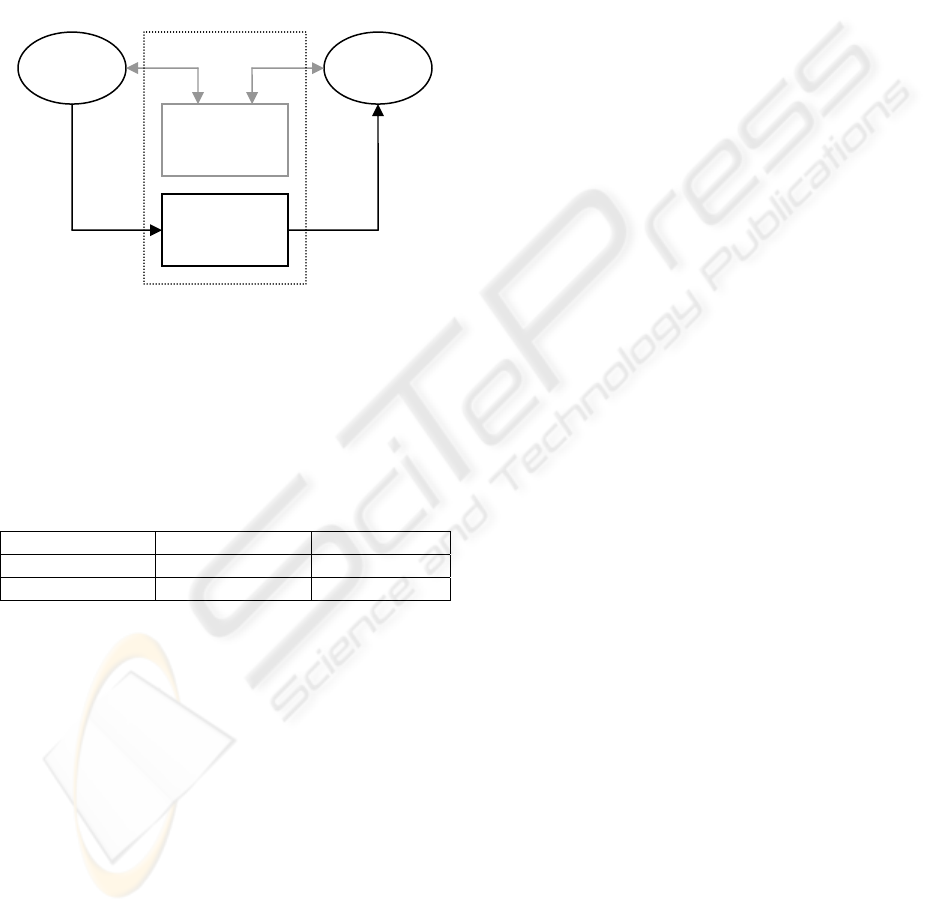
data being transferred, and control variables, each of
which is usually set by one side and read by the
other.
ACMs emphasize the asynchrony between the
reader and writer processes during data transfer, and
are therefore especially suitable for systems of the
future where multiple time domains not fully
synchronized with one another predominate. ACMs
can be classified into four types according to the
qualitative properties of the inter-process
asynchrony during data transfer as shown in Table 1.
When discussing ACMs, we assume that the data
being transferred consists of a stream of items of the
same type, and the writer and reader processes are
single-thread loops, during each cycle of which a
single item of data is transferred to or from the
ACM.
Table 1: ACM classification
NRR RR
NOW BB RR-BB
OW OW-BB OW-RR-BB
In Table 1, which follows the tradition of 2x2
matrix classification schemes found in (Simpson
2003, Xia et al 2002), NRR and RR stand for non-
rereading and rereading, while NOW and OW mean
non-overwriting and overwriting. Whether rereading
is permitted determines if the reader may be held up
waiting for new data to appear in the ACM. Whether
overwriting is permitted determines if the writer may
be held up waiting for previous data in the ACM to
be accessed by the reader. Therefore, a BB or
bounded buffer without overwriting and rereading
provisions, which includes most traditional inter-
process data buffering schemes, may require either
process to wait under certain circumstances. An RR-
BB may require the writer to wait when previous
data items have not been read. An OW-BB may
require the reader to wait when no newer data has
been made available by the writer after the previous
read. An OW-RR-BB, however, does not require
either side to wait under any circumstances.
The study of ACMs so far, though extensive, has
not extended to their direct modelling in application-
level tools. Previous proposals for modelling ACMs
at a higher level, treating them as components in
larger systems, have employed Petri nets (Xia 2000).
This was suitable for the case where systems
containing ACMs can be regarded and analysed as
general discrete event digital systems. However, in
order to study the effect of including ACMs in such
engineering application systems as control systems,
especially when analogue parts are present, ACM
models need to be integrated into popular
application-level tools such as MATLAB.
2 STATEFLOW MODELS OF
ACMS
MATLAB is a widely used modelling, simulation
and analysis tool for engineering application systems
in such fields as control, signal processing, large
scale hybrid systems with analogue and discrete
parts, etc. It also includes a Stateflow facility with
which discrete state-transition subsystems such as
ACMs can be modelled. In order to broaden the
application space of ACMs, we have developed a
method to model and simulate ACMs using
MATLAB, based on Stateflow. The two examples in
this section illustrate the method with RR-BB
algorithms.
2.1 Represent Handshake in the
Stateflow Model
The progress of ACM algorithms can be controlled
by the writer and reader processes via request-
acknowledgement handshakes. A four phase
handshake protocol follows this order: sending a
request, waiting for the acknowledgement sent from
the other side, releasing (resetting) the request, and
resetting the acknowledgement from the other side.
This can be modelled in Stateflow as shown in
Figure 2. One handshake cycle is represented in the
following way: a request is generated in the state
entry actions (the “En” statements), which are
executed when entering the state; the state itself
represents waiting for the acknowledgement in the
transition conditions (the conditions in the square
brackets, in the case of Figure 2, ACK becoming 1),
which lead to the exit from the state (end of waiting)
and executions of the transitions; on exiting a state,
the requests are released (in the “Ex” statements);
and then the acknowledgements can be reset.
Reade
r
Write
r
Shared
memory
Control
variables
ACM
data data
Figure 1: ACM with shared memory and possibly
control variables
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS
55
We built the Stateflow models of ACMs. based
on this representation of the handshake protocol.
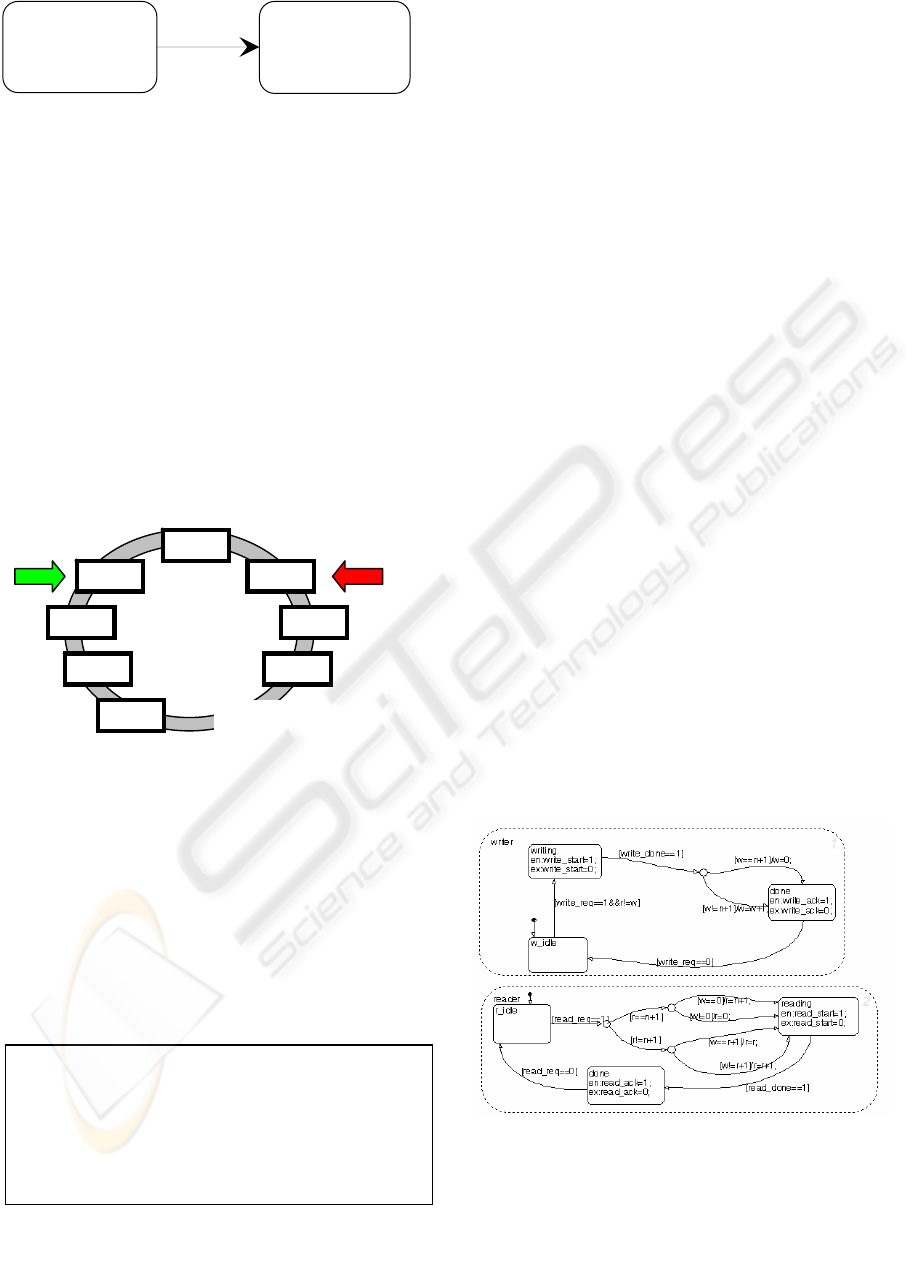
2.2 Global View of RR-BB ACM
A Bounded Buffer (BB) ACM can be implemented
with a ring structure formed by identical memory
cells (see Figure 4). One cell stores one data item at
a time. The cells can be added or removed to change
the size of the buffer. The two arrows in the figure
indicate the reader pointer and the writer pointer.
Each pointer points to the cell which is being
accessed by its corresponding process. After the
completion of a data access, the reader and writer
pointers are moved forward according to the specific
algorithm.
If the writer cycle is much longer than that of the
reader, its pointer may point to the cell immediately
ahead of the reader pointer. In this case the buffer is
empty, i.e. all the data items in the buffer have
already been read by the reader. Conversely, if the
writer cycle is much shorter than the reader cycle, its
pointer will likely point to the cell just behind the
reader pointer. The buffer is full in this case and
none of the data items in the buffer have been read
by the reader.
Rereading, if permitted, only occurs when the
buffer is empty with a new read request arriving.
Overwriting, if permitted, only happens when the
buffer is full with a new write request coming.
B
En:req2=1;
Ex:req2=0;
A
En:req1=1;
Ex:req1=0;
[ACK1==1]
The RR-BB ACM allows rereading but not
overwriting. A multi-cell RR-BB algorithm is
described in Figure 3.
Figure 3: Handshake protocol in Stateflow
Here n is the number of free cells which are not
occupied by the pointers w and r. Therefore for this
algorithm, n+2 is the total number of the memory
cells in the ring.
The algorithm can be implemented based on the
handshake protocol. For instance, each cycle of the
writer part of the algorithm can be connected to the
external writer process through a handshake during
each cycle of operation (i.e. request from writer
process to start wr, acknowledged by the writer part
of the algorithm at the end of w0). This also applies
to the reader side. The relationships between
statements rd and wr and the cell memory can also
be modelled as such handshakes. Both the writer and
reader algorithm cycles have wait states from which
they emerge only when the condition is correct
(external request arrives and additionally in the
writer’s case, r becoming different from w).
Cell
Cell Cell
Cell
Cell Cell
Cell
…
Cell
Figure 5 shows the Stateflow model for the
algorithm in Figure 3. In the writer, the wr statement
is matched to the writing state because it handshakes
with the shared memory. The w0 statement, which
updates w, is mapped to the transition action after
the writing state. After updating w, the write cycle is
completed and the done state handshakes with the
environment. The ww statement is merged into the
idle state, which represents waiting for the next
cycle request from the external writer, because it is
also conditional waiting. The two wait conditions
are “AND-ed” to produce the equivalent result.
Figure 4: Ring organization of ACM buffer
In the reader, what r0 does is modelled in the
transition actions before the reading state. The rd
statement is mapped to the reading state because of
the handshake. A done state follows reading to
acknowledge to the environment the completion of
var w: 0..n+1; r: 0..n+1; initialized sensibly (e.g.
r=w-1) and initialize data in the cells.
Writer Reader
wr:write cell w; r0:if (r+1 mod n+1)≠w
w0:w:=(w+1 mod n+1); then r:=(r+1 mod n+1);
ww:wait until r≠w; rd: read cell r;
Figure 5: Stateflow Model for Algorithm in Figure 2
Figure 2: n+2 Cells RR-BB ACM algorithm
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
56
the read cycle. An idle state is added at the end to
wait for the next request.
The initial state in the writer part is w_idle. The
writer will not become active until the write request
(the request signal from the external writer wishing
to start a write data access – statement wr) comes
and w is not the same as r. When the writer becomes
active, a write_start signal is sent to the cells, in
order to write the new data item to the corresponding
cell. When the writer receives a write_done signal
from the buffer, indicating the completion of wr, it
will change w to point to the next cell. Because of
the ring configuration, the writer needs to check if
the current cell is the one with the highest index. If it
is, w will be set to 0, which is the cell with the
lowest index. Otherwise, the value w will simply be
incremented. After that, a write_ack is sent back to
the environment. Then the writer will wait for the
resetting of the write_req signal before going back to
the w_idle state.
The reader is similar to the writer. The initial state
is r_idle. When a read request comes from the
environment, the reader will check if the next cell is
occupied by the writer or not. The same r+1 mod n+1
exercise is carried out to determine the index of the
next cell (either r+1 or 0). If the next cell is occupied
by the writer, the reader pointer will remain at the
current cell (for rereading). If not, the reader pointer
will be moved forward according to the r+1 mod n+1
rule. Then the reader sends a read_start signal to the
buffer in order to read the data item in the
corresponding cell. On completion of reading, the
reader will receive a read_done signal from the cells. A
read_ack is sent to the environment, and then the active
state moves to the r_idle state waiting for the next
read_req signal.
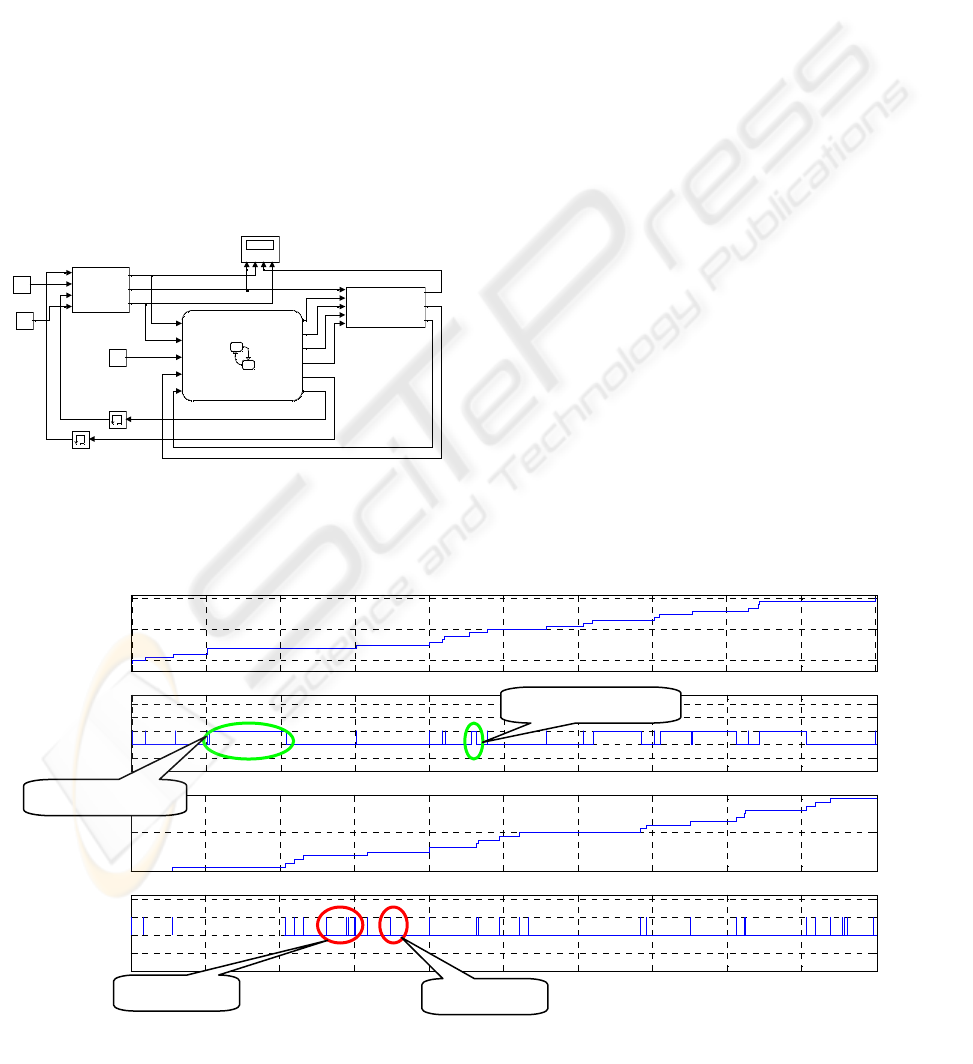
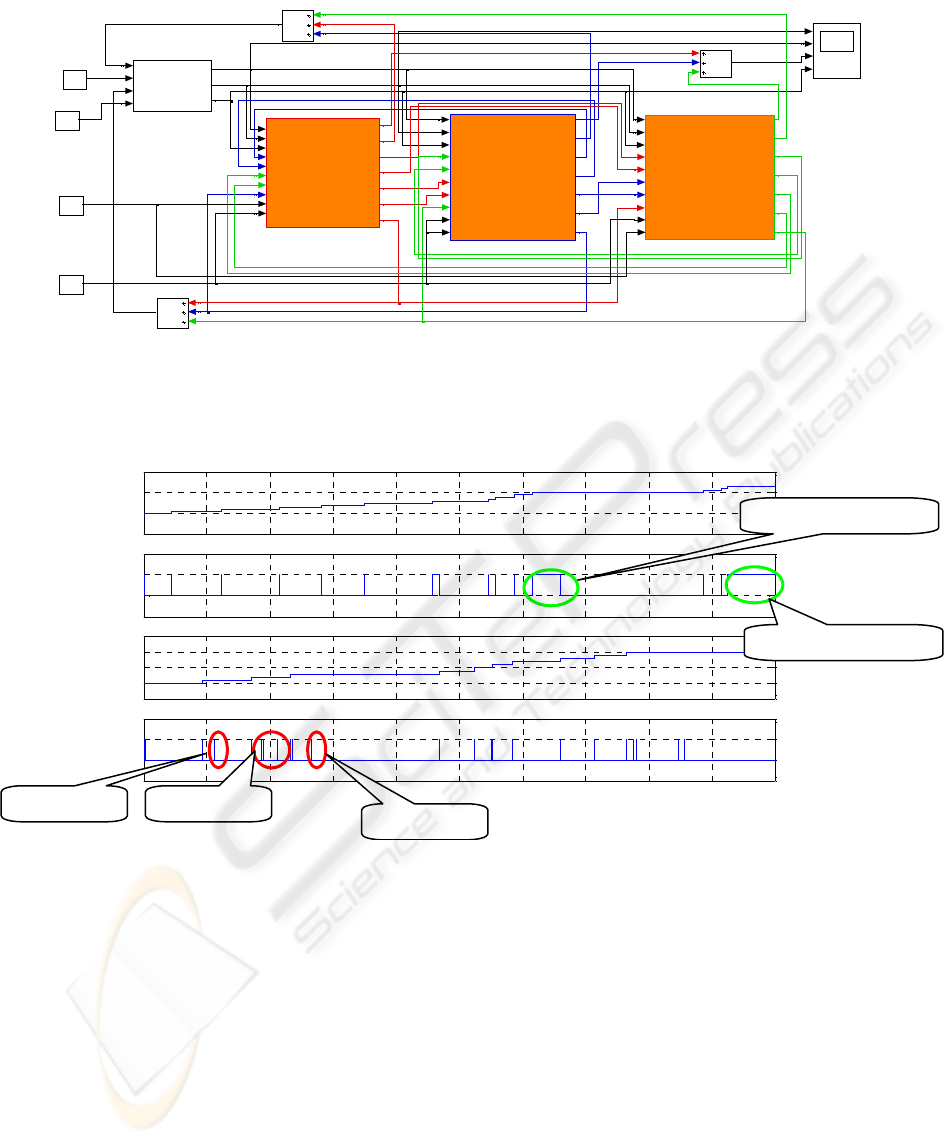
This Stateflow model can be plugged into the
Simulink environment. This is shown in Figure 7.
The test environment generates write requests, read
requests and the input data items. The data path is
made of memory slots (one slot per cell) to which the
data items are written in and from which the data items
are read out.
This ACM was simulated in this environment, with
resulting waveforms shown in Figure 6. Rereading
occurred when read requests came without new data
items available, as in the case after the data items 4 and
5 were read (encircled in the diagram). In this
simulation, n was set to 1, i.e. the total number of cells
was 3. Therefore, the writer waited if two consecutive
data items have not been read, as in the case after items
3 and 8 were written (encircled in the diagram).
Wac k
W_M u
Rac k
R_Mu
Wr eq
Dat a
Rre q
Test Environment
Sco pe
1
Number
Memory1
Memory
Dat ai n
Write_start
Read_start
W
R
Dat aO ut
Write_done
Read_done
Data Path
writ e_req
read_req
n
writ e_done
read_done
write_start
read_start
w
r
writ e_ack
read_ack
Control Ci r cuit
-C-
Constant1
-C-
Constant
Output Data
Write request
Write request
Input data
Read request
Read request
The algorithm in Figure 3, though neat and easily
understandable, is not suitable for hardware
implementation. In particular, the integer control
variables w and r will need many protections in order
to be considered atomic. The global view nature of the
indexing also means that the actual setting and reading
Figure 6: The Model in Figure 5 with Test Environment
0 5 10 15 20 25 30 35 40 45 50
0
10
20
Input data
0 5 10 15 20 25 30 35 40 45
-1
0
1
2
3
Writ e request
0 5 10 15 20 25 30 35 40 45 50
0
10
20
Output Data
5 10 15 20 25 30 35 40 45
-1
0
1
2
Read request
Wait after Item 8
Wait after Item 3
Time
RR Item 4
RR Item 5
Figure 7: Simulation Waveforms for Figure 6
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS
57
of these variables will include multiplexing and de-
multiplexing on a scale depending on the number n.
The fork and join operations needed mean that an
implementation of n+3 cells, for instance, cannot be
easily built upon one of n+2 cells.
2.3 Modular Design Model
The cellular structure of this kind of buffered ACMs
suggests that it may be possible to construct a
standard individual cell, complete with its own local
control variables, then use n of these for an n-cell
solution. This modular design approach is much
better suited for hardware implementations.
A localized algorithm for a single cell is
described in Figure 9.
The action “advancing to next cell” causes the
end of execution of the current cell’s writer/reader
algorithm and the beginning of the next cell’s one
from wr/r0. The reader algorithm loops at the same
cell until the condition wnext=0 is met. The writer
will wait at a cell until the condition rnext=0 is met.
Note that the writer algorithm sets both w and wnext
and reads rnext, and the reader algorithm sets both r
and rnext and reads wnext.
Because of the existence of the action “advance
to next”, one more handshake is in the writer/reader
in addition to the two mentioned in the previous
algorithm. After the writer/reader has advanced to
the next cell, the current one enters an idle state, and
it cannot respond to external requests until the
current w/r is set again (the process completing a
cycle of the ring). This needs to be dealt with using
an additional state in the model.
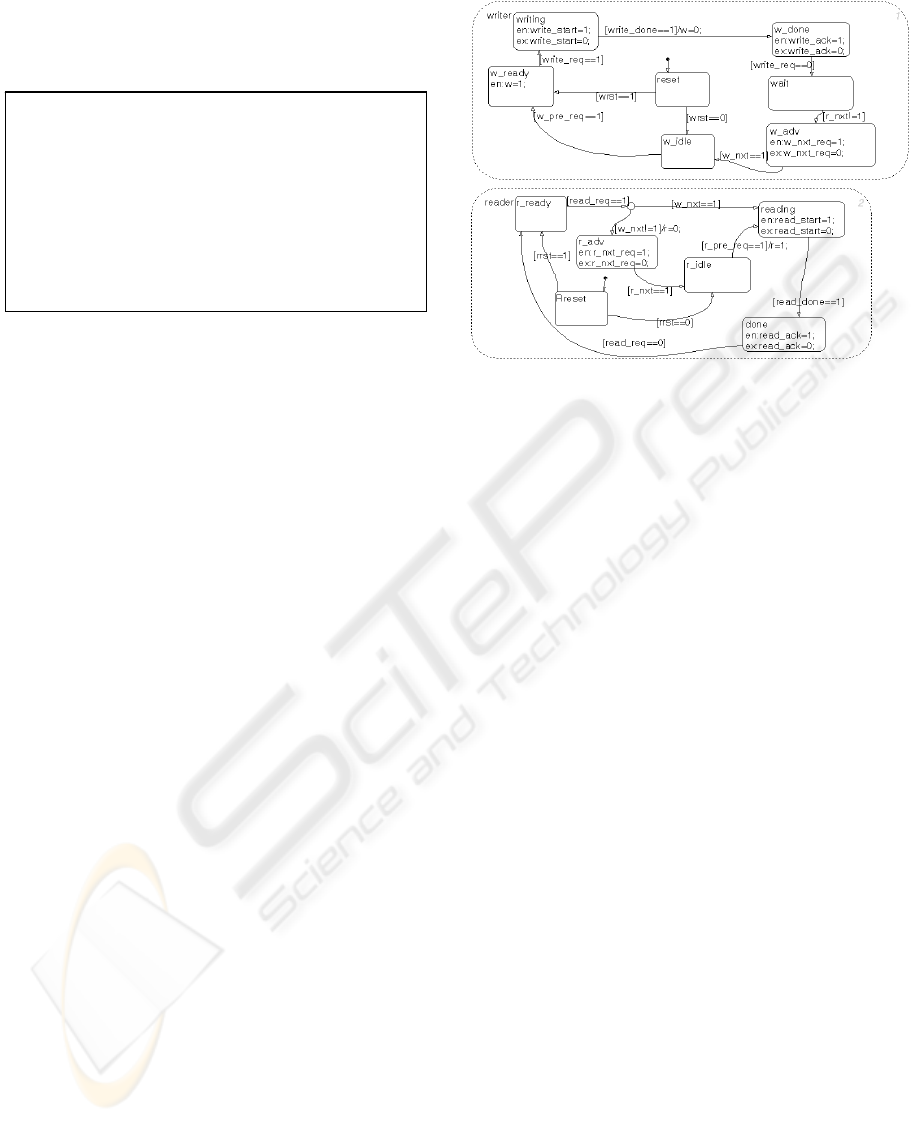
Figure 8 shows the Stateflow model of the
algorithm in Figure 9. In the writer part, the wr and
w0 statements were represented in Stateflow in the
same way as in Figure 3. After the w_done state, a
wait state is used to represent the ww statement,
instead of being merged into the following state. The
reasons of doing that are: 1) releasing the write
request is the only condition of finishing a write
cycle; 2) the only prerequisite of advance is r in the
next cell having been reset. These two conditions
cannot be combined together. The next statement wa
was mapped to the w_adv state. w_idle and w_ready
represented the two different states mentioned
before.
var w: 0..1; r: 0..1; initialized sensibly (one cell
has w=1 and one has r=1, all others being 0) and
initialize data in the cells.
Writer Reader
wr: write; r0: if wnext=0 then
w0: w:=0; wnext:=1; begin r:=0; rnext:=1;
ww: wait until
rnext=0;
advance to next end
wa: advance to next; rd: read;
Figure 9: Modular Design RR-BB ACM Algorithm
Figure 8: Stateflow model of the algorithm in Figure 9
The reader part consists of the three handshake
states, the idle and the ready state.
The model worked as follows: when the write
pointer points to the current cell (and with current
w=1) and a write request comes, the writer writes the
input data item into the memory of the cell. After
that, w is reset to 0 and wnext set to 1. At this point,
the write cycle is finished, a write acknowledgement
is sent back to the environment. However, the writer
pointer will not move to the next cell until rnext
becomes 0.
When a read request comes, the reader firstly
checks if the next cell is occupied by the writer or
not (if wnext is 1 or not). If it is not, it moves the
pointer to the next cell and does the reading.
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
58
Wack
W_ Mu
Rack
R_Mu
Wreq
Dat a
Rreq
Test Environment
Scope
write_req
Dat ain
read_req
w_nxt
r_nxt
w_pre_req
r_pre_req
nxt_rd_ack
wrst
rrst
Dat aOut
write_ack
w
r
w_nxt_req
r_nxt_req
read_ack
RR BB Single2
write_req
Dat ain
read_req
w_nxt
r_nxt
w_pre_req
r_pre_req
nxt_rd_ack
wrst
rrst
Dat aOut
write_ack
w
r
w_nxt_req
r_nxt_req
read_ack
RR BB Single1
write_req
Dat ain
read_req
w_nxt
r_nxt
w_pre_req
r_pre_req
nxt_rd_ack
wrst
rrst
Dat aOut
write_ack
w
r
w_nxt_req
r_nxt_req
read_ack
otherwise, it stays the current cell and rereads its data
item.
The ready states in the Stateflow are used to
initialise the position of the pointers. If the pointer
moves to the current cell, the system is in the ready
state, otherwise, it is in the idle state.
Consider the control flow from w_ready state to
w_done state in the writer: After releasing the
acknowledgement, the writer does not send the advance
request until r_nxt = 0 (next cell is no longer accessed
by the reader). When the writer receives the w-setting
acknowledgement from the next cell, it releases the
request, moves to the idle state, and waits for the
advance request from the previous cell.
When a read request comes to the current cell, the
reader sends an advance request to the next cell if it is
no longer accessed by the writer (w_nxt is not 1), and
goes to the idle state when r in the next cell is set. At
the same time, the next cell moves the active state from
idle to reading. After finishing reading, the reader
sends an acknowledgement and goes back to the ready
state.
The Simulink model showing connections between
cells is in Figure 10. Figure 11 shows the simulation
results for the model in Figure 10. Rereading occurred
after data items 1, 2, 3 were read, and writer waiting
happened after data items 9, 12 were written. These
correspond with the properties specified for the RR-BB
ACM.
RR BB Single
1
Constant3
0
Constant2
-C-
Constant1
-C-
Constant
Figure 10: Modular 3 Cell RR-BB ACM Simulink model
0 5 10 15 20 25 30 35 40 45 50
-10
0
10
20
0 5 10 15 20 25 30 35 40 45 50
-1
0
1
2
0 5 10 15 20 25 30 35 40 45 50
-5
0
5
10
15
0 5 10 15 20 25 30 35 40 45 50
-1
0
1
2
Time
Input Data
Write Reqs
Output Data
Read Reqs
Wait after Item 9
Wait after Item 12
RR Item 1 RR Item 2
RR Item 3
Figure 11: Simulation of the RR-BB ACM model in Figure 10
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS
59
3 A MOTOR CONTROL SYSTEM
WITH ACM
Here we use an example application system case
study to demonstrate the usefulness of these kinds of
ACM models.
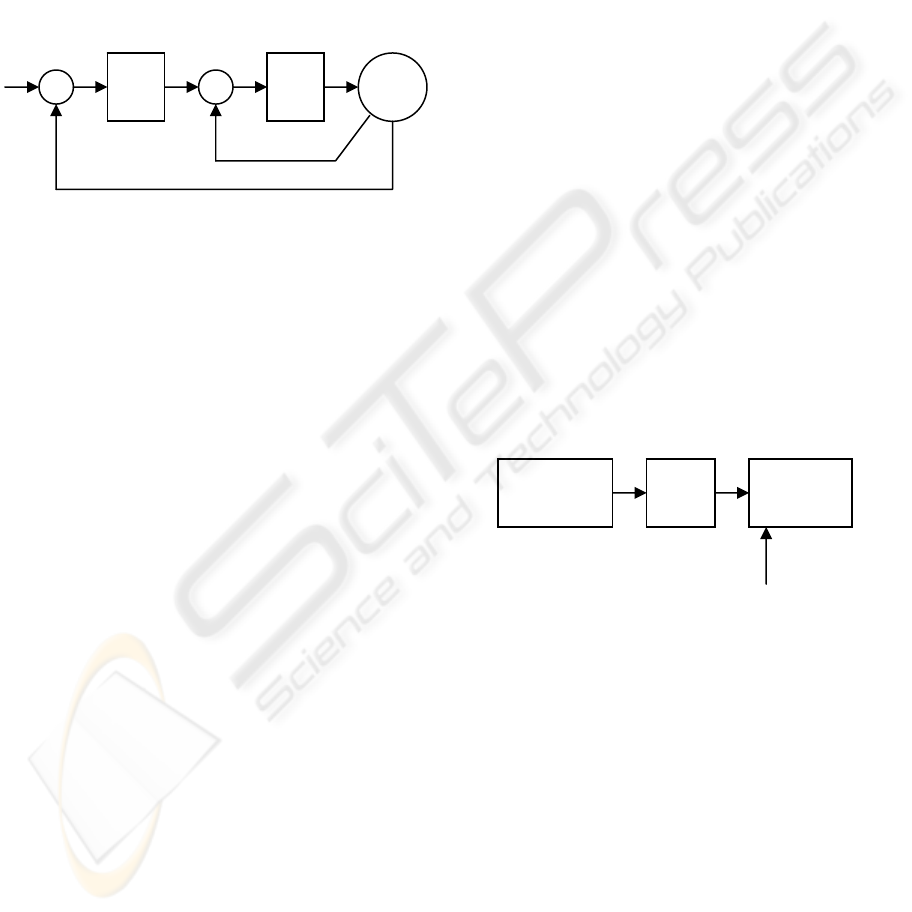
Figure 12 shows the basic structure of a
distributed motor control system found in (Kappos et
al 1990). The vC and iC blocks are the velocity and
current/torque controllers, both integrated into the
same ASIC in (Kappos et al 1990). The velocity and
current control laws are implemented digitally.
Because of the different speed requirements (the
inner loop requiring considerably faster control
actions than the outer one), the digital parts of the
ASIC controller were implemented in a dual-speed
fashion. The link between vC and iC is in effect
implemented as an analogue connection, with the
digital output from vC first converted into analogue
then re-sampled to provide the input for iC.
This kind of temporal decoupling is essential in
these kinds of distributed systems. In motor control
systems especially, if the inner and outer loops are
not temporally decoupled, potential digital hazards
such as deadlocks can propagate through from one
loop to another. The function of the inner control
loop is normally safety-critical, because even
temporary failure there could have catastrophic
effects such as causing the power electronic
elements or fuses to fail. If such a motor is used in a
safety-critical application (for instance in an
aeroplane fuel pump), such failures which cannot be
recovered on-line must always be avoided. As a
result, the capability of the inner loop to continue
functioning even when the outer loop has stopped
working is of vital importance. This means that even
though both vC and iC may be integrated into the
same piece of silicon, they must in reality be
temporally independent of each other.
Because of the difference in speed requirements
for the vC and iC parts, assuming the same
technology is being used to implement them in
hardware, the part of the hardware where vC is
implemented could have large amounts of excess
computational capacity. This makes it attractive to
attempt to make use of this capacity for other tasks,
i.e. to effectively implement the vC part as one of
the threads in a multi-tasking processing element.
This makes it possible for its progress to be affected
by other factors outside the immediate control
system boundary. Well-implemented operating
systems such as real-time kernels may take care of
the safety-critical implications of such complications
by ensuring that critical threads do not wait for
information from other threads.
At the basic hardware level of the data
connection between the iC and vC parts of an
embedded hard-wired controller chip, this kind of
non-blocking communication can be implemented
by using an analogue link. However, this implies an
analogue/digital hybrid chip.
- -
M iC vC
θ
d
θ
i
With ACMs, the same kind of temporal
decoupling can be realized without resorting to
inserting an analogue wire between two digital
devices. The OW-RR-BB type ACMs, especially,
mimics this function of an analogue wire perfectly.
When an OW-RR-BB is “full”, the writer overwrites
one of the items in it instead of waiting for a space
to appear, and when it is “empty” the reader rereads
the item it read during the previous cycle instead of
waiting for a new item to appear. This is
functionally the same as connecting the writer with
the reader through a D/A and A/D converter pair,
assuming perfect level-matching in the converters.
Figure 12 Schematic of dual-loop motor control system
We have implemented a Stateflow OW-RR-BB
ACM model using the techniques outlined in the
previous section. It was then inserted into a
MATLAB model of the system in Figure 12.
Figure 13 shows the way in which an OW-RR-
BB ACM was used to connect the fast and slow
controllers in the motor control system. The iC part
of the control law has a sampling frequency of 30
kHz and the vC part of the control law has a
sampling frequency of 1 kHz. Our simulations with
a single-cell OW-RR-BB ACM show that the reader
part of the ACM reads each data item approximately
30 times, as expected, and overwriting rarely
occurred. Some artificial perturbations were put into
the frequencies of the clock signals going into both
the vC and iC parts as a form of noise.
iC – fast ACM
i feedback
vC – slow
Figure 13: ACM connecting fast and slow circuits
The simulation results were compared with
results from simulating an entirely analogue version
of the same system. There were no detectable
differences from the output waveforms of both θ and
i. This is expected because an OW-RR-BB ACM is
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
60
the digital emulation of direct analogue connection,
if the latency/delay associated with the buffering can
be neglected. It behaves the same as a D/A →
perfect analogue connection with delay → A/D
combination in this case. Because of the vastly faster
inner loop the latency caused by the buffering
associated with the single cell in the ACM is
unimportant.
4 SUMMARY AND FUTURE
WORK
We have developed a series of techniques with
which MATLAB/Simulink models can be
implemented for ACM algorithms. Initial simulation
results show that these models perform as expected,
i.e. the same as predicted theoretically from the
algorithms.
An initial case study successfully demonstrated
that these kinds of ACM models can be plugged into
MATLAB models of control systems for the purpose
of simulation.
MATLAB direct to hardware fast prototyping
tools are becoming available (Xilinx), potentially
making it possible to save the step of implementing
DSP hardware through the traditional VLSI process.
Future developments in this direction could
potentially lead to the direct hardware
implementation of application systems containing
ACMs designed and verified in MATLAB. This
provides another motivation for this kind of work.
Future work includes the further development of
MATLAB/Simulink models for non-ACM
components which would highlight the effect of the
various degrees of temporal decoupling ACMs bring
to systems.
ACKNOWLEDGEMENT
This work is part of the Coherent project
(
http://async.org.uk/coherent) at the Newcastle
University supported by the EPSRC grant
(GR/R32666). The authors benefited from extensive
discussions with H. Simpson and E. Campbell and
wish to express our gratitude.
REFERENCES
Kelly, C. IV, V. Ekanayake, and R. Manohar, 2003.
SNAP: a sensor-network asynchronous processor.
Proc. ASYNC 2003, IEEE Computer Press.
Simpson, H., 2003. Protocols for Process Interaction. IEE
Proceedings on Computers and Digital Techniques,
2003, 150, (3), pp 157-182.
ITRS 2003.
http://public.itrs.net/files/2003itrs/home2003.htm.
Min, R. et al., 2001. Low-power wireless sensor networks.
Proc. VLSI Design 2001, January 3-7, 2001,
Bangalore, India.
Xia, F., A.V. Yakovlev, I.G. Clark, and D. Shang, 2002.
Data Communication in Systems with Heterogeneous
Timing,
IEEE Micro, 22, (6), pp. 58-69.
Xia, F., 2000. Supporting the MASCOT method with Petri
net techniques for real-time systems development.
PhD Thesis, London University.
Kappos, E., D.J. Kinniment, P.P. Acarnley, A.G. Jack,
1990. Design of an integrated circuit controller for
brushless DC drives. Proc. Fourth International
Conference on Power Electtronics and Variable-Speed
Drives, pp.336-341, London, UK, July 1990.
Xilinx System Generator for DSP,
http://www.xilinx.com/xlnx/xil_prodcat_product.jsp?ti
tle=system_generator
MATLAB MODELS OF ACMS IN CONTROL SYSTEMS
61
