
ABOUT NATURE OF EMERGENT BEHAVIOR IN MICRO-SYSTEMS
Sergey Kornienko, Olga Kornienko, Paul Levi
University of Stuttgart
Universit
¨
atsstr. 38, D-70569 Stuttgart, Germany
Keywords:
Emergent behavior, Micro-robotic systems, Robotic swarm intelligence.
Abstract:
Micro-robotic systems have very limited computational and communicating resources on board. However
they have a broad spectrum of tasks to be solved. One of approaches to solve these tasks by such capability-
restricted systems consists in utilizing emergent properties of many interacting robots. In the presented work
we consider the questions what is the emergent behavior in technical systems and how this artificial emergence
differs from the natural analogue ? These points are discussed on examples of spatial and functional emergence
in a group of ”micro-agents”.
1 INTRODUCTION
Micro-robotic systems represent a new trend not only
in robotics, but also in distributed artificial intelli-
gence. The extreme miniaturization of these systems
creates new challenges for a robot’s hardware. How-
ever the typically ”software” concepts of controlling,
perceptions and planning get also completely differ-
ent forms. Because of very small size, these robots
do not have sometimes even a CPU-based micro-
controller and possess very limited communication
bandwidth and range. Despite these limited abilities,
a group of robots has to solve a broad spectrum of
tasks, as e.g. cleaning, micro-assembling, transporta-
tion of micro-objects, collective perception and so on.
A way to achieve the desired collective behavior in
a group of micro-robots consists of creating specific
swarm-like-behavior, known from the insect world.
As shown by natural examples, this emergent kind
of behavior is very efficient, flexible and is closely
related with collective (or swarm-) intelligence (Ca-
mazine et al., 2003). Moreover it does not require
complex control systems and allows a large number
of independent units to accomplish collectively the
common goal. The swarm behavior is widely encoun-
tered in natural collective systems, however what is a
swarm-like-behavior in robotic systems ? More gen-
erally, what is an emergent behavior in technical sys-
tems ? Are there advantages of creating this behavior
over traditional programming ? Although there is a
long discussion in the vast literature on the object (see
e.g. (Mataric, 1992)), many points still remain open.
Emergent behavior can not be programmed di-
rectly. It is created by specific interactions among
subsystems. These, in turn, are determined by lo-
cal rules, governing behavior of each subsystem. For
”insect-standard” problems, like route optimization or
collective defence, we can find and adopt the rules
from the insect-world (Bonabeau et al., 1999). But
for technical activities, like assembling of micro-
constructions, we have to derive artificial rules, lead-
ing to desired emergent behavior. And so we have the
following paradox: emergent behavior arises with-
out being programmed, but we are still going to pro-
gramm it by specific rules. What it does mean ”cre-
ation of desired emergent behavior” ?
In this paper we consider a problem of emergent
behavior in micro-systems within the framework of
I-SWARM project (I-Swarm, 2007), paying the main
attention to irregularity of technically useful emergent
behavior. This irregularity is the distinctive feature of
technical systems. We illustrate the emergence with
examples such as the formation of spatial groups and
the assembly of micro-objects.
2 EMERGENCE IN TECHNICAL
SYSTEM
Phenomenon of technical emergence. ”Emergence
is a process by which new structures and functions
come into being” (Cariani, 1997). There are several
kinds of emergence, e.g. ”combinatorial”, ”creative”,
33
Kornienko S. and Kornienko O. (2004).
ABOUT NATURE OF EMERGENT BEHAVIOR IN MICRO-SYSTEMS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 33-40
DOI: 10.5220/0001142200330040
Copyright
c
SciTePress
”thermodynamic” and so on. Generally we refer the
emergent property of system to arising of something,
being not explicitly programmed. We assume that this
arising ”new” possesses some useful properties, oth-
erwise the phenomenon of emergence would not at-
tract so much attention to itself.
Almost all examples of emergence originate from
natural systems. Swarm behavior in flocks, insect
colonies and shoals is fascinating. However how
much this behavior can be applied to precise techno-
logical systems of robots, software and mobile agents
? Natural and technical systems are quite different
and the questions is whether the swarm behavior in
these systems is also different ?
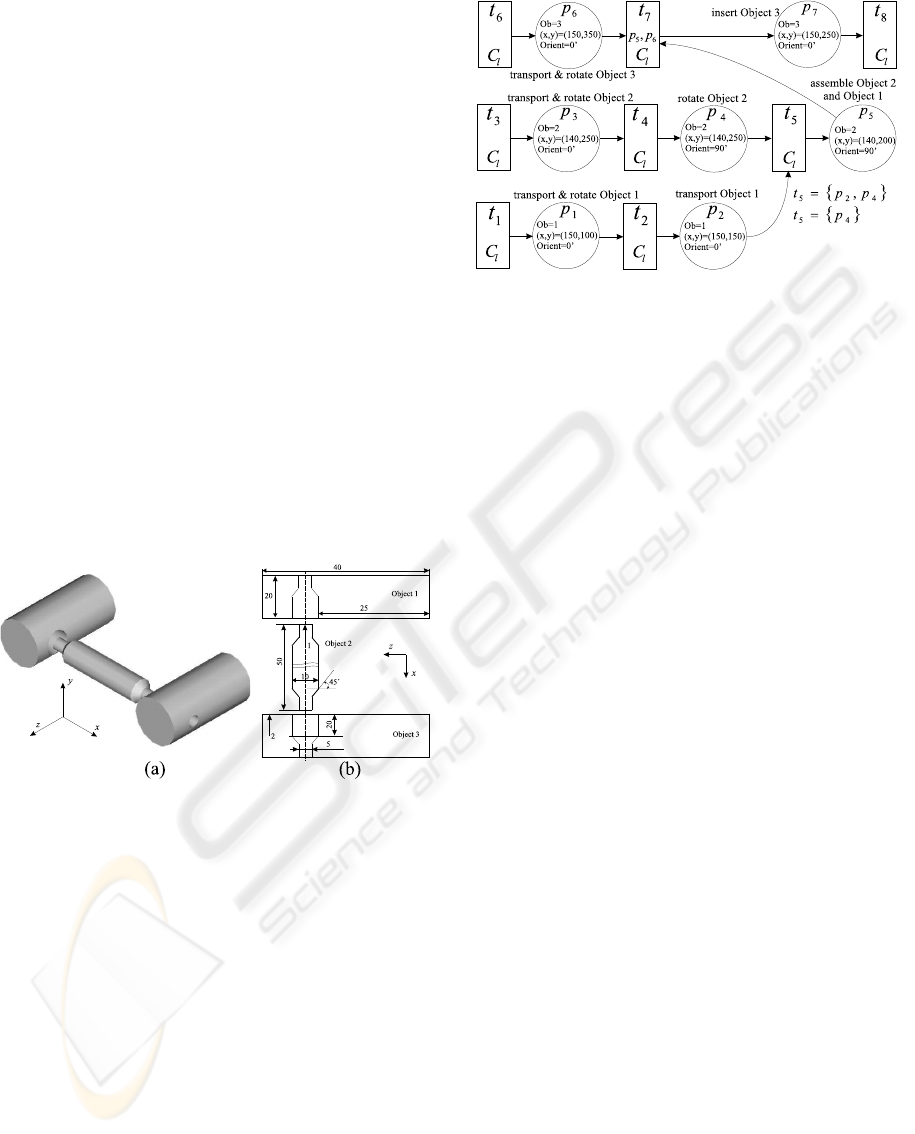
We consider this problem on the maximal simpli-
fied example of an assembling of micro-objects. Let
we have two different kinds of agents with different
abilities and two kinds of objects with different geom-
etry (see fig. 1). The common task, to assemble them
into a construction, can be solved only by a coopera-
tion between agents. Usually such a cooperation can
be achieved by corresponding scheduling of agents
activities. Since we do not preprogram this schedul-
ing, an appearance of cooperation can be thought as
an emergent property of this system.
Figure 1: The workpieces to be assembled; (a) 3D Repre-
sentation; (b) The x-z section of objects
An assembling of the workpiece should be per-
formed in some specified order, otherwise we do not
obtain the desired detail. Independently of the assem-
bling method, classical or swarm-like, the assembling
order should be preserved. The assembling plan is
represented as the Petri Net, shown in fig. 2. The plan
consists of 7 steps, shown as the phases p
1
-p
7
with the
corresponding positions and rotation angles. The or-
der of assembling is following: the phases p
1
, p
3
and
p
6
can be started in parallel. However, other phases
have to be proceeded sequentially. The phase p
7
can
be started only if p
5
, p
6
are finished. For the phase
p
5
we have two cases. The objects Ob
1
and Ob
2
can
be assembled if either the object Ob
1
or the object
Ob
2
are placed in the required position, t
5
= {p
4
, p
2
}
for the first case, t
5
= {p
4
} for the second one. The
restrictions on the order of operations are the global
restrictions C
g
.
Figure 2: The assembling plan. P
i
are phases, where t
i
are
transitions with the shown conditions (e.g., conditions for
t
7
are the satisfaction of local constraints C
l
from fig. 3,
and the finished phases p
5
, p
6
)
There are two kinds of agents. The first one Ag
1
can rotate an object, where as the second one Ag
2
can transport an object. Both agents have a ”position”
(x, y) in the agent’s local coordinate system and have
simple 8-directional movement system. Objects also
have ”position” (x, y), ”rotation angle” α and ”geom-
etry” (h, l). Each agent observes neighbors in some
radius R
vis
. It can also measure a distance to tar-
get and a rotational angle of target (closely to object).
In order to simplify the problem, we do not consider
collisions between agents and an agent takes an ob-
ject by placing itself in the geometric origin of an ob-
ject (x
0
, y
0
). Each agent reads from the plan only
relative distances between objects (position of assem-
bling place is marked by a mark). If an agent starts
some activity with an object, it marks this object by
putting a number of current phase on the mark (e.g.
in the electromagnetic way).
An agent can start transportation or rotation only
if its position coincides with the position of an ob-
ject. Moreover, before starting an activity, an agent
has to be sure that the object is not currently process-
ing by other agent or the current activity is not already
done by other agent (these problems can be solved by
marking). We denote these restrictions as the local re-
strictions C
l
. Activity of each agent can also be rep-
resented in the form of Petri Net (see fig. 3). Agents
start from random initial positions. Objects are also
initially placed in random positions with random an-
gles, but without intersections between objects.
Emergence of cooperation. In simulation, each
agent looks for objects in own neighborhood. For the
found object, the agent reads the mark and calls the
required activities from the locally stored plan. If the
local and global restrictions are satisfied, the agent ex-
ecutes the required activities. The local rules of an
agent have the following form:
ICINCO 2004 - ROBOTICS AND AUTOMATION
34
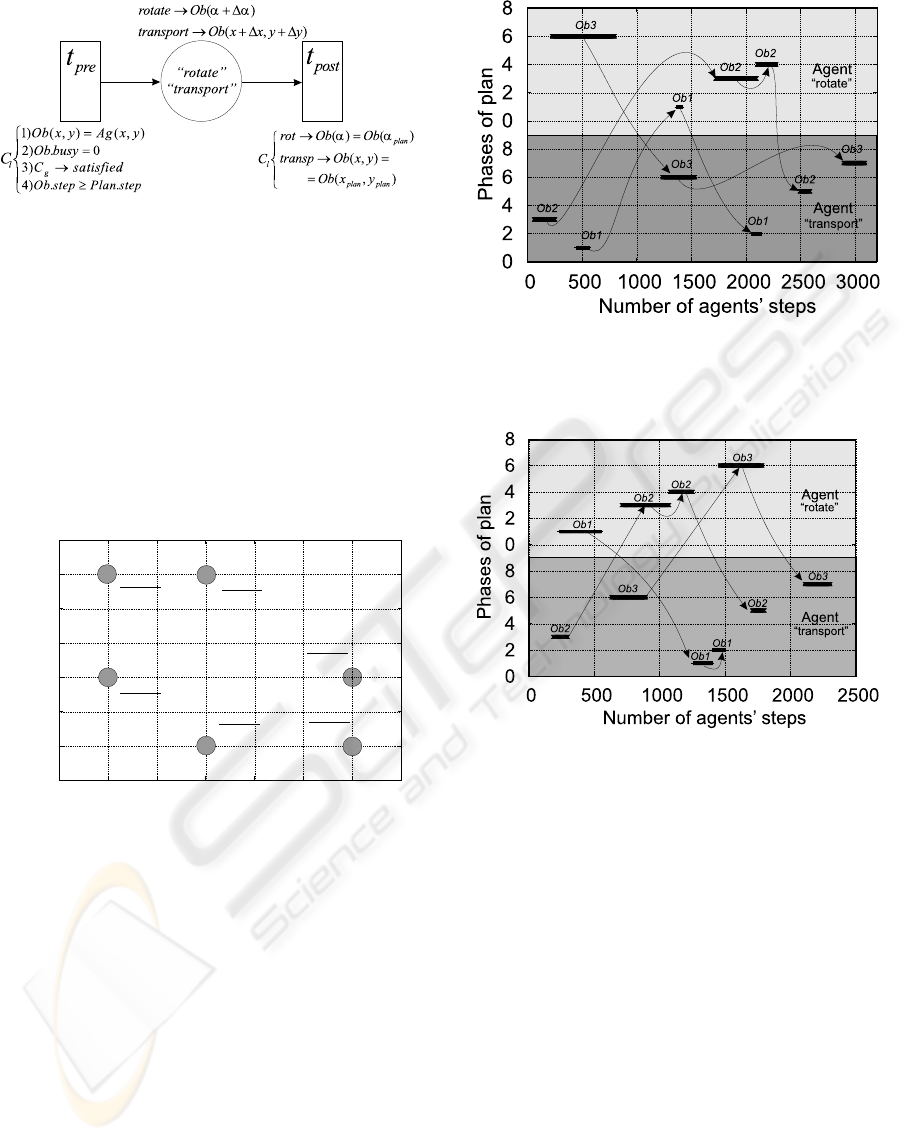
Figure 3: Activity ”transport” and ”rotate” of agent with lo-
cal constraints C
l
. Activity ”move” is called automatically
if a position of agent do not coincide with a position of tar-
get
Ob=look for (visible objects);
read mark (Ob);
if (constraints(Ob)) do (Activity);
As already mentioned, agents can start assembling
from different initial phases of the plan. In fig. 4
we compare the possible initial phases with the av-
erage length (time steps) of assembling. Two gener-
0
1
2
3
4
5
6
7
0 1 2 3 4 5 6 7
initial phase for Ag “rotate”
initial phase for Ag “transport”
2839,7
2837,4
3039,4
3045,7
3142,5
3342,2
3311,6
3322,7
3591,0
3588,2
2573,9
2567,9
Figure 4: Phases diagram of the Petri-network shown in
fig. 2. In the fraction near each initial point the numerator
shows an average length of an assembling with t
5
= {p
4
},
the denominator shows an average length of an assembling
with t
5
= {p
4
, p
2
}. Agents start from random initial
conditions,100×100 square,R
vis
= 400, shown is the av-
erage result of 10000 simulation’s cycles
ated agent-agent cooperation’s patterns are shown in
figs. 5, 6. We see, the initial order of phases causes
completely different cooperation between agents.
Therefore we can choose more short assembling by
putting additional rules as e.g.
at choice ->
choice phase with smaller number;
On this example we can discuss the question why
do we need the emergence in technical systems ? The
first advantage of emergent behavior is a simplicity
Figure 5: Example of emergent ”agent-agent” cooperation,
generated by the local rules. Initial phases are (Ag
1
)
init
=
p
6
and (Ag
2
)
init
= p
3
Figure 6: Example of emergent ”agent-agent” cooperation,
generated by the local rules. Initial phases are (Ag
1
)
init
=
p
1
and (Ag
2
)
init
= p
3
of generating local rules. They can be implemented
even in a very restricted hardware. Simplicity of local
rules represents important issue for micro-systems.
The second advantage consists in flexibility of gen-
erated behavior. Flexibility means that if some ele-
ments of agent’s system or of a plan itself will be per-
turbed, agents can absorb this disturbance and are still
able to accomplish their common business. We do not
need to reprogram the system every time. To demon-
strate it, we perturb positions and rotation angle of
all objects. In this way we simulate micro-vibration
of mechanical origin. Comparison between unper-
turbed and perturbed assembling is shown in fig. 7.
As seen from this figure, agents can still finish assem-
bling even at very strong positional noise. However
they are sensitive to positional-angle noise.
We see, that the cooperation, even in this sim-
ple example, emerges without being preprogrammed.
ABOUT NATURE OF EMERGENT BEHAVIOR IN MICRO-SYSTEMS
35
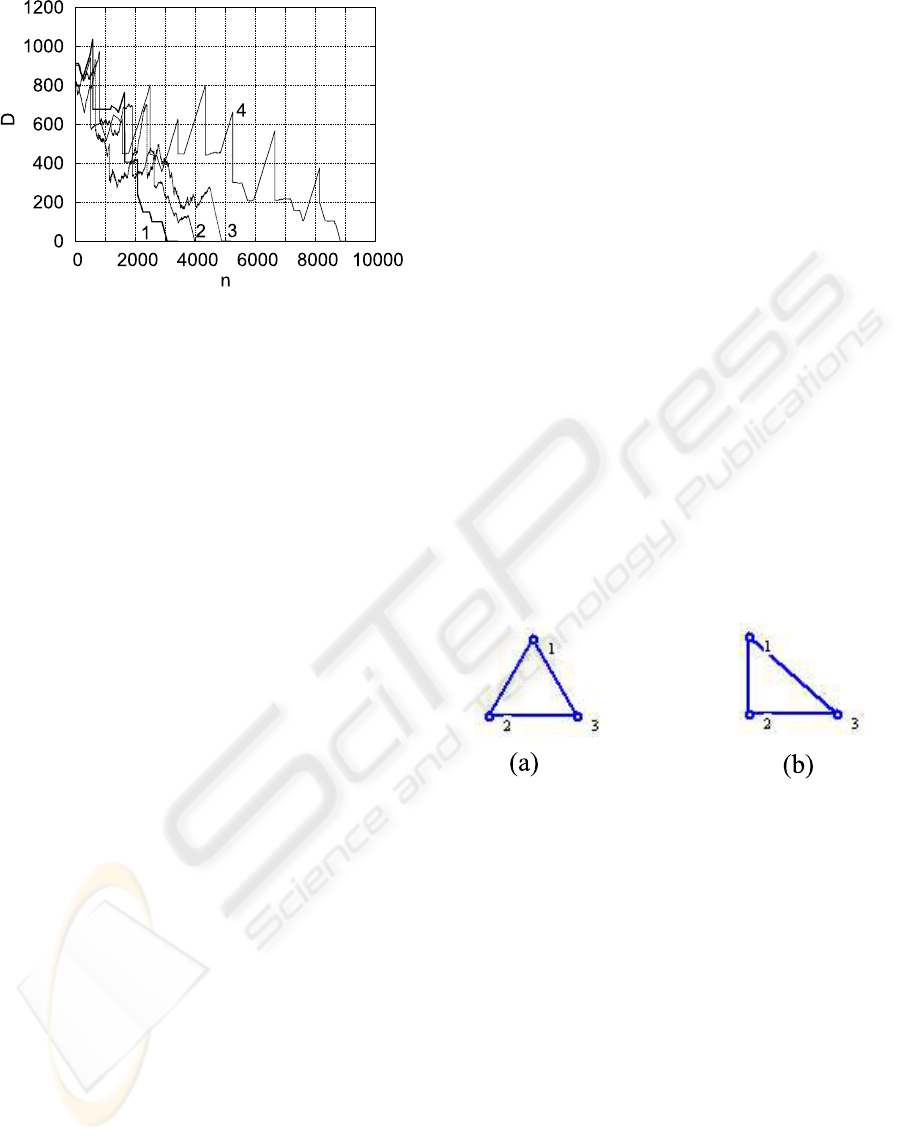
Figure 7: Perturbation of micro-assembling by ”micro-
vibration”, D - difference between the plan and real assem-
bling’s state (
P
of all positions and angles), n- number of
steps; 1- unperturbed assembling, 2- with perturbed posi-
tions of objects (±1 per simulation’s tact); 3- with perturbed
positions of objects (±2 per simulation’s tact); 4- perturbed
positions and rotation angles of objects (±1 per 50 simula-
tion’s tacts)
Emergence arises because of interactions between
agents. These interactions, in turn, are determined by
local rules that govern behavior of each agent. How-
ever this kind of emergence differs from natural emer-
gence observed e.g. in biological systems.
Firstly, in technical systems we needed more or
less specific spatial or functional emergent behavior.
”Specific” means that the behavior should meet pre-
defined requirements. We denote these requirements
as ”irregularities”, because they introduce into normal
(”regular”) behavioral course irregular components.
In the assembling example, they are local and global
constraints. We could denote this emergence as con-
straint or irregular emergence.
Special kind of irregularities are parameters. In the
assembling, each operation is parameterized by data
from the plan. Without knowing these parameters,
agent cannot accomplish assembling. There is still
open discursion about how many parameters have to
be involved in the emergent behavior ? Should the
agents e.g. know own neighbors ? Where is a limit of
parametrization, after that the behavior is less emer-
gent and more predetermined ? One possible way to
answer these questions is to define a compromise be-
tween ”useful” and ”useless” emergent behavior. We
can ”sacrifice” a ”useless” part of collective system,
so that to minimize a parametrization of a ”useful”
part. Generally, parametrization still remains a re-
search point.
Secondly, as observed from the simple assembling
example, the emergent behavior can be of different
efficiency. In contrast to natural systems, which have
to be foremost reliably, the technical emergence has
to be also optimal. Thus, we have to derive such local
rules that not only generate the desired emergence,
but also optimize it.
3 CONSTRUCTION AND
GENERATION OF EMERGENT
PATTERNS
Speaking about emergent behavior, we speak primar-
ily about emergent behavioral patterns. This issue, in
turn, consists of two following points: construction of
desired patterns and generation of desired patterns.
Construction of emergent patterns. This point
concerns regularity and irregularity of patterns to be
emerged. We can intuitively assume that regular pat-
terns are more ”ordered”, than irregular patterns. The
”order”-degree of a pattern can be associated with the
number of rules, required to construct it. Thus, if a
pattern is regular we need less rules to construct it,
than in case of an irregular pattern. The number of
required rules we can estimate by calculating Kol-
mogorov complexity of corresponding symbolic se-
quences. To exemplify this idea, let us consider two
simple patterns, shown in fig. 8.
Figure 8: Examples of regular (a) and irregular (b) spatial
patterns
We write a pair of distance D (between neighbors
j and i) and neighbors i, j as [D, (j, i)]. For the
shape in fig. 8(a), (b) we have correspondingly the
sequences S
1
= [D, (1, 2)], [D, (2, 3)], [D, (1, 3)], ....
and S
2
= [D
1
, (1, 2)], [D
1
, (2, 3)], [D
2
, (1, 3)], .....
Now we find the rules that can generate S
1
and S
2
.
For that we use the well-known LZ77 approach (Ziv
and Lempel, 1977). The schematic output of LZ77
algorithm in the form (O, L)C (O-offset from current
position, L-length, C-chairs) is shown in fig. 9.
We see, that irregularity of the pattern in fig. 9(b)
occurs in two ways: appearance of additional rules
(1st and 2nd cycles) and parametrization of these
rules. As known, the regular behavior (and in this
way local rules) can be derived by optimizing some
quantities (e.g. energy consumed by a system) or by
some simple principles. Can the local rules in fig. 9 be
ICINCO 2004 - ROBOTICS AND AUTOMATION
36
(0,0) [ D,
(0,0) ( perm. (i,j) )],
(2,2) EOF
(0,0) [ D ,
(0,0) (perm. (i,j) )],
(2,2) [ D
(0,0) (perm. (i,j) )],
(4,4) EOF
1
2
exept(1,3)
,
only(1,3)
2 cycle
nd.
spatial parameters
functional parameters
1 cycle
st.
1 cycle
st.
S
1
S
2
(b)
(a)
Figure 9: The schematic output of LZ77 algorithm, applied
to the sequences S
1
(a) and S
2
(b)
obtained in this way ? We can write such a principle
without difficulties for the first sequence S
1
:
keep up equal distance to all agents;
As a result we get an equilateral triangle. If we have to
obtain a specific equilateral triangle we have to spec-
ify the desired distance. However how to obtain the
rules for S
2
in fig. 9(b), especially their parametriza-
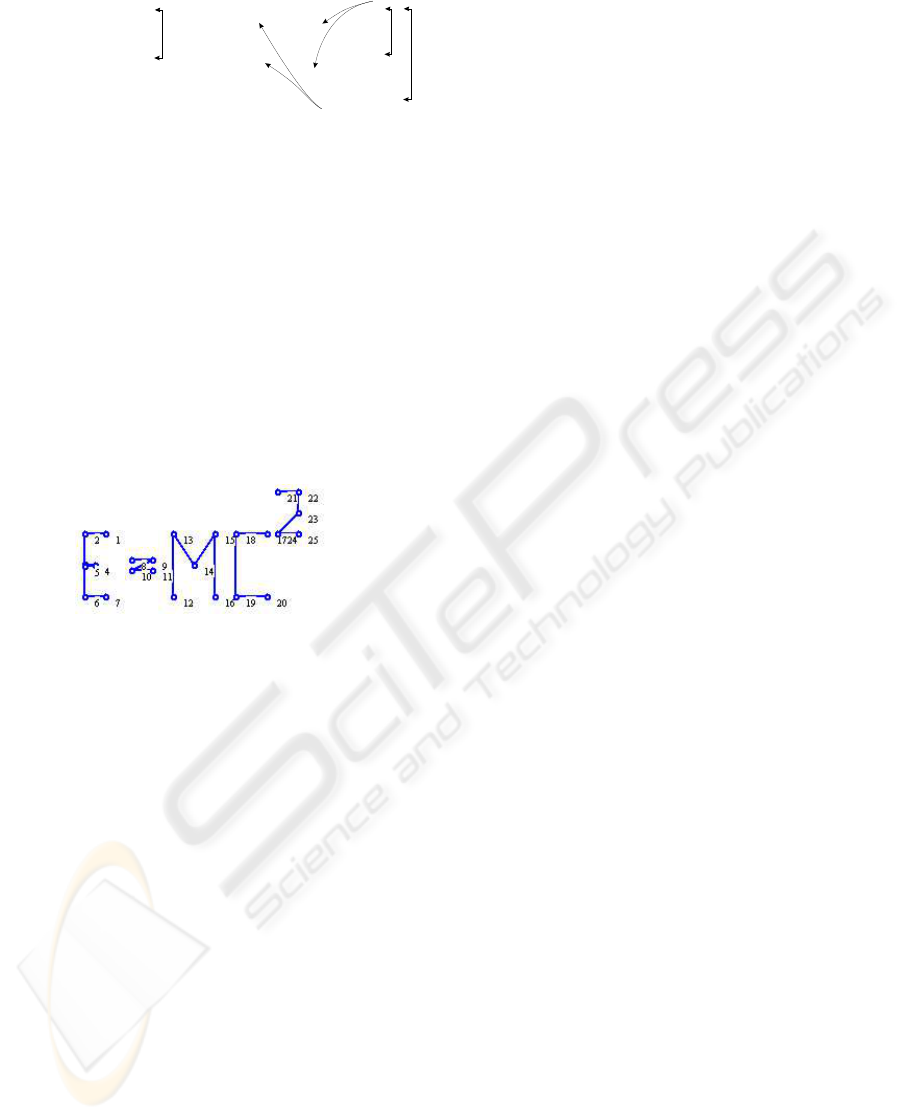
tion ? In fig. 10 we show more complex irregular pat-
tern. Obviously, this pattern requires essentially more
Figure 10: Example of complex irregular spatial pattern
rules and parameters. Could it be generated by some
compact evolutional process ? We think it is possible,
but the Kolmogorov complexity of generating gram-
mar is much higher, than the irregular generated pat-
tern itself. For the pattern in fig. 10 we know only
one evolutional process that can generate it, namely,
evolution of human civilization ! Therefore for gen-
erating irregular patterns, the irregularities (primarily
parametrization) have to be explicitly introduced into
rules. Unfortunately, the most of technically useful
behavioral patterns are irregular.
The question is whether we can generalize this con-
clusion for other kinds of behavioral patterns (e.g.
functional patterns, like the assembling’s plan, shown
in fig. 2) ? Here we refer to the genetic program-
ming, namely to the evolving of computer program
capable of emergent collective behavior, discussed in
the Koza’s work (Koza, 1992, p. 340). He consid-
ers a group of independent agents with one common
goal to consolidate widely dispersed pellets of food
into one pile. Agents have behavioral and transporta-
tional rules, but initially there is no composition of
these rules that allows accomplishing the common
task. Koza introduces the fitness function ”to mini-
mize the sum of distances between food pellets”. This
fitness is similar to the evolutional rule that gener-
ates the sequence S
1
. Performing the GP procedure
with this fitness, agents collect the food pellets into
one pile. This behavior corresponds to the regular be-
havioral pattern. However if agent have to collect the
food in specific way, or the pile should have specific
form (e.g. a storehouse) we have to introduce the pa-
rameters that will describe irregularities so that to cre-
ate the desired emergence. These parameters cannot
arise evolutionary, they have to be defined in advance.
In this way, the conclusion about parametrization can
be expanded to other kinds of behavioral patterns.
Generation of desired emergent patterns. Emer-
gent behavior arises as a result of self-organization
(SO). Therefore generation of desired emergence con-
sists in creating purposeful self-organization. How-
ever such a self-organization that takes place in tech-
nical systems. Are there differences between the ”ar-
tificial” and ”natural” self-organization ?
Per definition, ”the self-organization is a process
by which global external influences stimulate the start
of internal for the system mechanisms, which bring
forth the origin of specific structures in it” (Bushev,
1994, p. 24)). Thus, the often used notion of self-
organization is given by the emergence of ordered
macroscopic structure in absence of central control.
But if we apply this notion to technical systems, many
systems will be matched up with this definition. For
example, consider organization’s local network. Data,
e-mails and news are accurately delivered from sender
to receiver, printers print different documents, servers
operate with clients and so on. All elements of this
network remains autonomous, there is no central ele-
ment, finally, at some control parameters, this system
demonstrates either ordered or chaotic behavior. But
this behavior is not a result of self-organization, the
order in this system arises in preprogrammed way.
Could we refer the process of assembling, dis-
cussed in the previous section, to self-organization
phenomena ? Let us compare this system with nat-
ural systems. Firstly, this is the open system influ-
enced from environment. Secondly, modifying the
control parameters (e.g the visibility radius R
vis
), a
cooperation between agents becomes ordered. There
is no central element, that would tell each agent what
is to do. The cooperation is not preprogrammed, it
arises from interactions between agents. Therefore,
from the general viewpoint, the assembling occurs in
the self-organizing way. However this group of agents
has remarkable differences with natural systems.
• In the most natural self-organizing systems the con-
trol parameters are represented by energy (mat-
ter) flow, change of control parameter is given by
a change of these quantities. This energy (mat-
ter) flow determines interactions among elements
in these systems. In artificial systems information
is disconnected from energy (matter) flow.
ABOUT NATURE OF EMERGENT BEHAVIOR IN MICRO-SYSTEMS
37
• Interactions among elements in natural self-
organizing systems are fixed by chemical, physical
or other laws. However the interactions as well as
structure of artificial systems can be changed.
In natural systems a dependence between interac-
tions, structure, function, information and control
parameters is determined by physical laws intro-
duced into a system by energy flow. This depen-
dence determines effects that we denote as natural
self-organization. In artificial systems an energy flow
does not influence the system so strongly as in natu-
ral systems. Therefore in order to create a purposeful
artificial self-organization this dependence has to be
defined anew.
Now backwards to the question of what is self-
organization in artificial systems. As said above, the
artificial self-organization has more degrees of free-
dom than the natural self-organization. These addi-
tional degrees are the structure, rules, transfer func-
tions, information processing, number of elements,
control parameters, initial conditions and so on. We
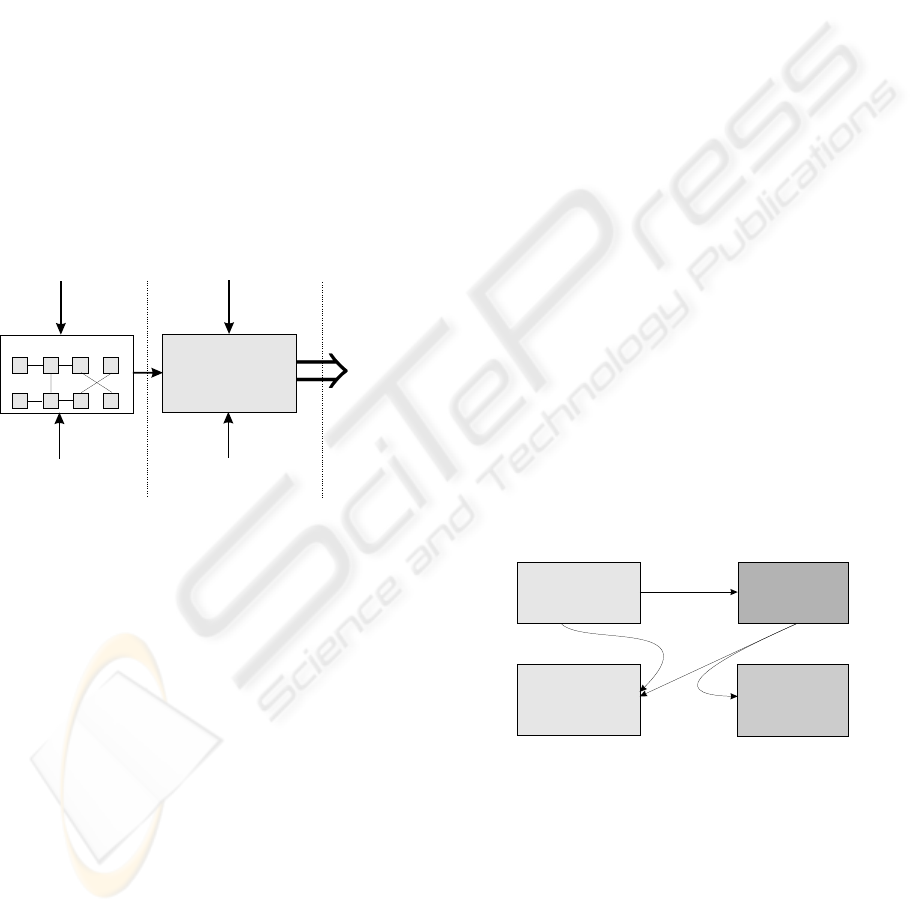
represent the structure of these systems in fig. 11.
Energy/
Information
System /Function
self-organized
“transfer function”
macroscopically
observable
phenomena
emergent
(collective)
behavior
Control
parameters
Information
Rules
Functional/
natural system
Structural/
artificial system
Structure
Figure 11: The structure of artificial self-organizing system
We see, that the emergent behavior is macroscopic
observable phenomenon, generated by a ”transfer
function” of a system. Arising of this ”transfer func-
tion” represents a process of self-organization, which
is controlled by control parameters. Changing of con-
trol parameters changes ”transfer function” and, in
turn, macroscopic phenomena. Such a kind of self-
organization on the level of functions can be denoted
as the functional (or natural) self-organization. In
functional SO interactions among elements are pre-
defined, so that the self-organized ”transfer function”
is fixed.
Additional degrees of freedoms in artificial systems
appears on the level of structures. Changes of struc-
tures modify the ”transfer functions”, that, in turn,
change macroscopic phenomena. The structures con-
sist of basic elements (agents) and interactions among
them. Interactions are created by local rules gov-
erning basic elements. If there is a mechanism that
can systematically change the structure, the interac-
tions among elements are no longer preprogrammed,
they, as well as the self-organized ”transfer function”,
are generated dynamically. The self-organization cre-
ated on the level of structures by these ”structure-
generating-mechanisms” can be denoted as structural
self-organization.
Both functional and structural SO phenomena gen-
erate emergent behavior. However there is a big dif-
ference between them. The functional SO creates only
one emergent behavioral pattern, where as the struc-
tural SO generates a cluster of such patterns.
The functional and structural SO can be created in
many different ways. The most often discussed way
consists in deriving a set of local rules. There are two
strategy to derive them. At the bottom-up strategy, the
local rules are first programmed into each agent. This
rule-based programming (Roma et al., 1993), origi-
nates from the domain of parallel and distributed com-
puting. Generation of these rules is mostly considered
in a context of refining sequential program into con-
current one (Back and Sere, 1991).
The general problem of bottom-up approach is that
we cannot say in advance, which emergent behavior
will be generated by the chosen rules (by analogy with
the well-known ”three-body problem” from nonlinear
dynamics (Arnold(Ed.), 1988)). As pointed out by
other authors (e.g. (Darley, 1994)) ”A true emergent
phenomenon is one for which the optimal means of
prediction is simulation”. The origin of this problem
lies in enormous complexity of nonlinearly interact-
ing system. Since the bottom-up derived rules gen-
erate only one emergent behavioral pattern (that not
necessarily coincides with the desired one), we refer
this strategy to the functional SO phenomenon.
Another way to derive the desired behavior con-
sists in the top-down strategy, shown in fig. 12. Using
macroscopically
defined pattern
desired
microscopically
generated pattern
cluster of
macroscopic
patterns
“distributing”
transformation
generation
parameters
set of
local rules
W
W
{ }
R
kk
RS ®
kk
SR ®
{ }
W
Figure 12: Top-down strategy of derivation of local rules
this strategy, the derivation of local rules starts from
definition of a macroscopic pattern Ω. This is a de-
sired collective phenomenon, that the system has to
demonstrate. Examples of these patterns are shown
in figs. 2, 8, 10. The most of macroscopic patterns
can be created without any difficulties. Assume, we
have an algorithm, that can decompose an achieve-
ment of Ω into n-subtasks Ω
i
. We also have a set
of agents {Ag} with corresponding elementary activ-
ities, however so, that they can collectively solve each
ICINCO 2004 - ROBOTICS AND AUTOMATION
38
of Ω
i
. The decomposition algorithm splits up each of
Ω
i
further, up to elementary agent’s activities. Thus,
we have {Ω
j=1...m
i=1...n
} sequences of activities, where an
agent Ag
k
needs m steps to solve Ω
i
. Since this algo-
rithm decomposes systematically, we can assume that
all agents can solve Ω by executing {Ω
j
i
}. Remark,
that a cooperation between agents arises naturally as
the top-down decomposition of common task.
From agent’s viewpoint, each agent Ag
k
has a se-
quence of activities S
k
= {Ω
1
, Ω
2
, ..., Ω
m
}. Now,
calculating Kolmogorov complexity of sequence S
k
(finding the smallest grammar (Charikar et al., 2002)),
we can derive local rules R
k
that can generate S
k
. The
set of these rules {R} defines a cooperation between
agents that allows the agents’ group cooperatively to
solve the common task Ω. Such a decomposition ap-
proach (algorithm of symbolic task decomposition -
ASTD) is described in (Kornienko et al., 2004b) and
the whole rule-derivation procedure in (Kornienko
et al., 2004a).
Remark, that the set of local rules {R} generates
not only one desired pattern. For example, the as-
sembling rules, shown in sec. 2, can generate an ar-
bitrary assembling process of this type. The spe-
cific assembling of the workpiece in fig. 1 arises by
parametrization of these rules by data from the plan
in fig 2. Therefore we associate the top-down strategy
of rule derivation with the structural self-organization.
In turn, the structural SO phenomenon can be sepa-
rated into rule-, parameter- and information-based ap-
proaches. Generally, investigation of structural self-
organization represent also the point of further inves-
tigation.
4 SCALABILITY OF EMERGENT
BEHAVIOR
As known from natural systems, emergent behavior is
scalable, the number of participants can be increased
and decreased without essential change of behavior’s
features. However investigating scalability in techni-
cal systems we encounter two following issues.
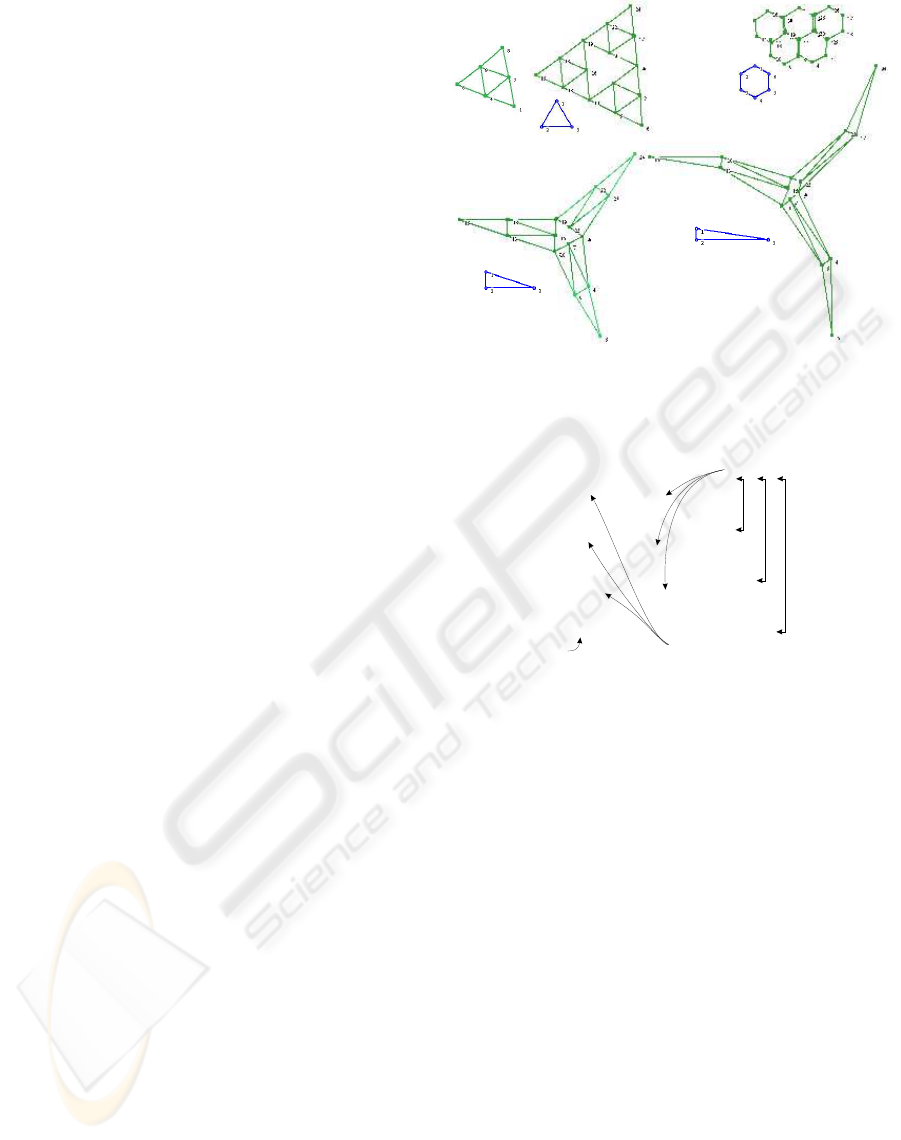
Appearance of rules hierarchy.
If the desired emergent behavior is regular, the scal-
ing does not represent any problems. However if the
desired pattern contains irregularities, we need ad-
ditional rules that describe scalability of irregulari-
ties. These irregularities are nonsymmetric form of
shapes, specific connections between basic elements
(see fig. 13) and so on. As a result, a hierarchy of
rules appears (see fig. 14). The more irregularities
will be inserted into the scaled pattern, the more hier-
archical rules need to be introduced into each agent.
There are two main problems of such a rules’ hier-
archy. The first one consists in a close connection
(b)
(d)
(a)
(c)
Figure 13: Examples of scaled spatial formations, built dy-
namically by agents. Small shapes represent basic structural
elements of corresponding formations
(0,0) [ D ,
(0,0) (perm. (i,j) )],
(2,2) [ D
(0,0) (perm. (i,j) )],
(4,4)
(0,0)
(6,6) (n-times) EOF
1
2
exept(1,3)
,
only(1,3)
[ D ,
(perm. (i,j) )],
3
param.(i,j)
3 cycle
th.
spatial parameters
functional parameters
scaling
2 cycle
nd.
1 cycle
st.
Figure 14: Appearance of rules’ hierarchy at the scaling,
shown is the schematic output of LZ77 algorithm
with a size of a group. At really large group there
arises a large hierarchy of rules, so that hardware abil-
ities of real micro-robots can be quickly exhausted.
The second problem is rules’ preconditions. Each be-
havioral rule has a precondition and a postcondition,
as shown in fig. 3. If there arise many hierarchical
rules, then there arise also many hierarchical precon-
ditions. At each step, an agent calculates all these
preconditions in order to choose the next rule. It con-
sumes time and computational resources. Generally,
this problem is also known in other robotic scenarios,
e.g. soccer-playing robots in RoboCup. However, for
micro-robots, this can have essentially more grievous
consequences. Thus irregularities of emergent behav-
ioral patterns represents a serious obstacle, especially
in large groups. A strategy to get round this prob-
lem consists in finding a compromise between ”use-
ful” and ”useless” emergency, as mentioned in sec. 2.
Change of collective strategy.
At the scaling, the group can undergo a change of
collective strategy. To demonstrate this effect, we put
additional ”bottom-up” cooperation rule into an as-
ABOUT NATURE OF EMERGENT BEHAVIOR IN MICRO-SYSTEMS
39
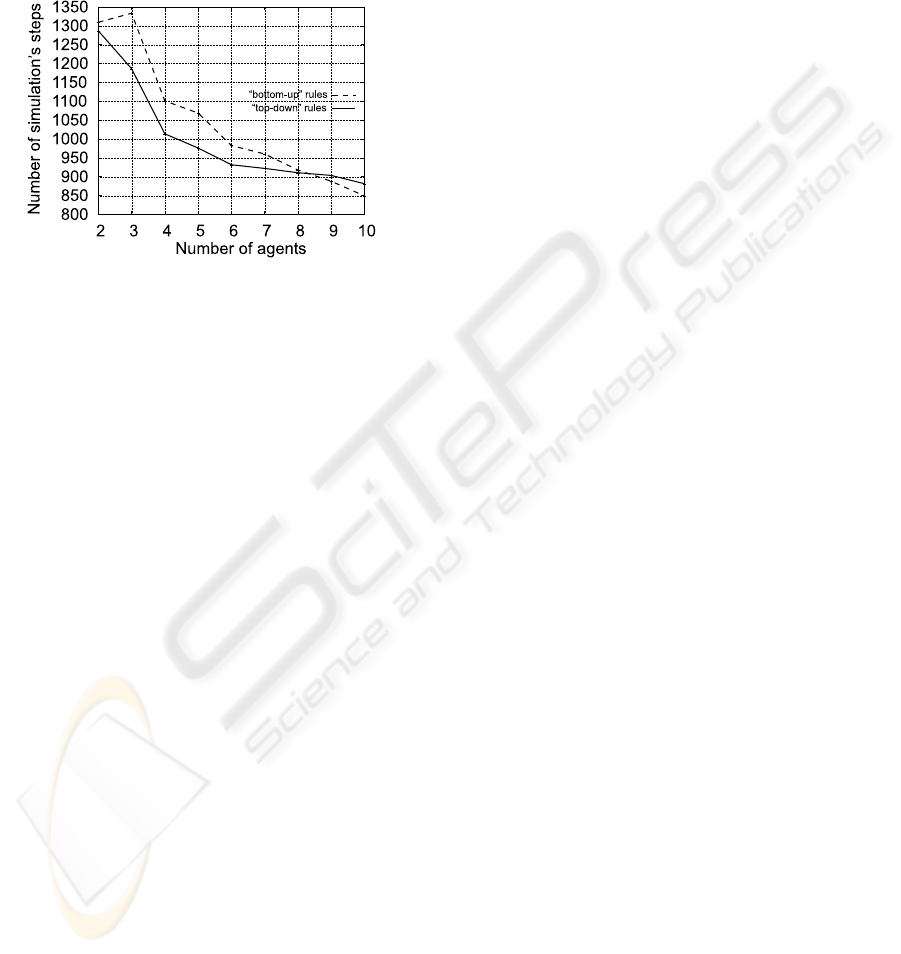
sembling rules, discussed in sec. 2:
I’m Ag_i;
if (Ag_j=take the same Ob as I){
Ob -> to Ag with smaller Dist. to it;}
In fig. 15 we show the comparison between these
”bottom-up” and ”top-down” rules. For small num-
Figure 15: Comparison between the ”bottom-up” and
”top-down” rules. Agents start from random initial
conditions,100×100 square,R
vis
= 400, shown is the av-
erage result of 100000 simulation’s cycles
ber of agents, the ”top-down” rules are more efficient.
However, if this number grows, the ”top-down” rules
becomes less efficient. At some turn-over-threshold,
the group changes the collective strategy and the
”old” rules can not guarantee any more the achieve-
ment of desired emergence. Therefore this effect, and
especially a drift of the turn-over-threshold, has to be
taken into account at the top-down design of local
rules.
5 CONCLUSION
In this paper we have discussed several aspects of de-
sired emergent behavior in technical micro-systems.
As shown, technically useful emergence differs from
natural emergence in several points, the most impor-
tant is an appearance of irregularities. The treatment
of irregularities concerns coalition formation, con-
structions of spatial and functional groups, planning
and so on. Especially serious problem arises at scal-
ing emergent behavior. Generally, a treatment of ir-
regularities represents a point of further research.
Acknowledgment. The presented work is made
in the framework of SFB 467 ”Transformable Busi-
ness Structures for Multiple-Variant Series Produc-
tion” (supported by the German Research Foun-
dation) as well as EU-Project ”Intelligent Small
World Autonomous Robots for Micro-manipulation”
(I-Swarm).
REFERENCES
Arnold(Ed.), V. (1988). Dynamical systems III. Springer
Verlag, Berlin, Heidelberg, New York.
Back, R. J. R. and Sere, K. (1991). Stepwise refinement of
action systems. Structured Programming, 12:17–30.
Bonabeau, E., Dorigo, M., and Theraulaz, G. (1999).
Swarm intelligence: from natural to artificial systems.
Oxford University Press, New York.
Bushev, M. (1994). Synergetics: chaos, order, self-
organization. World Scientific Publisher.
Camazine, S., Deneubourg, J.-L., Franks, N., Sneyd, J.,
Theraulaz, G., and Bonabeau, E. (2003). Self-
Organization in Biological Systems. Princeton Uni-
versity Press, Princeton, NJ, USA.
Cariani, P. (1997). Emergence of new signal-primitives in
neural networks. Intellectica, 2:95–143.
Charikar, M., Lehman, E., Liu, D., Panigrahy, R., Prab-
hakaran, M., Rasala, A., Sahai, A., and Shelat, A.
(2002). Approximating the smallest grammar: Kol-
mogorov complexity in natural models. In Proc. of the
34th ACM symposium on Theory of computing, pages
792–801. ACM Press.
Darley, V. (1994). Emergent phenomena and complexity. In
Proc. of Alive IV Workshop, Cambridge, MA.
I-Swarm (2003-2007). I-Swarm: Intelligent Small World
Autonomous Robots for Micro-manipulation. Euro-
pean Union 6th Framework Programme Project No
FP6-2002-IST-1.
Kornienko, S., Kornienko, O., and Levi, P. (2004a). Genera-
tion of desired emergent behavior in swarm of micro-
robots. In Proc. of the 16th European Conf. on AI
(ECAI 2004), Valencia, Spain.
Kornienko, S., Kornienko, O., and Levi, P. (2004b). Multi-
agent repairer of damaged process plans in manufac-
turing environment. In Proc. of the 8th Conf. on Intel-
ligent Autonomous Systems (IAS-8), Amsterdam, NL,
pages 485–494.
Koza, J. (1992). Genetic programming: on the program-
ming of computers by means of natural selection. MIT
Press, Cambridge, Massacgusetts, London, England.
Mataric, M. (1992). Designing emergent behaviors: From
local interactions to collective intelligence. In J-
A. Meyer, H. R. and S. Wilson, e., editors, Proc. of
the 2nd Int. Conference on Simulation of Adaptive Be-
havior (SAB-92), pages 432–441. MIT Press.
Roma, G.-C., Gamble, R. F., and Ball, W. E. (1993). Formal
derivation of rule-based programs. IEEE Trans. Softw.
Eng., 19(3):277–296.
Ziv, J. and Lempel, A. (1977). A universal algorithm for
sequential data compression. IEEE Transactions on
Information Theory, 23(3):337–343.
ICINCO 2004 - ROBOTICS AND AUTOMATION
40
