
DEAD RECKONING FOR MOBILE ROBOTS USING TWO
OPTICAL MICE
Andrea Bonarini
Matteo Matteucci
Marcello Restelli
Department of Electronics and Information – Politecnico di Milano
Piazza Leonardo da Vinci, I-20133, Milan
Keywords:
Optical sensors, dead redoking, cinematic independent odometry, . . .
Abstract:
In this paper, we present a dead reckoning procedure to support reliable odometry on mobile robot. It is
based on a pair of optical mice rigidly connected to the robot body. The main advantages are that: 1) the
measurement given by the mice is not subject to slipping, since they are independent from the traction wheels,
nor to crawling, since they measure displacements in any direction, 2) this localization system is independent
from the kinematics of the robot, 3) it is a low-cost solution. We present the mathematical model of the sensor,
its implementation, and some empirical evaluations.
1 INTRODUCTION
Since the very beginning of mobile robotics, dead
reckoning was used to estimate the robot pose, i.e.,
its position and its orientation with respect to a global
reference system placed in the environment. Dead
reckoning is a navigation method based on measure-
ments of distance traveled from a known point used
to incrementally update the robot pose. This leads to
a relative positioning method, which is simple, cheap
and easy to accomplish in real-time. The main disad-
vantage of dead reckoning is its unbounded accumu-
lation of errors.
The majority of the mobile robots use dead reckon-
ing based on odometry in order to perform their navi-
gation tasks (alone or combined with other absolute
localization systems (Borenstein and Feng, 1996)).
Typically, odometry relies on measures of the space
covered by the wheels gathered by encoders which
can be placed directly on the wheels or on the engine-
axis, and then combined in order to compute robot
movement along the x and y-axes and its change of
orientation. It is well-known that odometry is subject
to:
• systematic errors, caused by factors such as
unequal wheel-diameters, imprecisely measured
wheel diameters and wheel distance, or an impre-
cisely measured tread (Borenstein and Feng, 1996);
• non-systematic errors, caused by irregularities of
the floor, bumps, cracks or by wheel-slippage.
In this paper, we present a new dead reckoning
method which is very robust towards non-systematic
errors, since the odometric sensors are not coupled
with the driving wheels. It is based on the mea-
sures taken by two optical mice fixed on the bottom
of the robot. We need to estimate three parameteres
(∆x, ∆y, ∆θ), so we cannot use a single mouse, since
it gives only two independent measures. By using two
mice we have four measures, even if, since the mice
have a fixed position, only three of these are indepen-
dent and the fourth can be computed from them. We
have chosen to use optical mice, instead of classical
ones, since they can be used without being in contact
with the floor, thus avoiding the problems of keeping
the mouse always pressed on the ground, the prob-
lems due to friction and those related to dust deposited
in the mechanisms of the mouse.
In the following section, we will present the moti-
vations for using this method for dead reckoning. In
Section 3, we show the geometrical derivation that al-
lows to compute the robot movement on the basis of
the readings of the mice. Section 4 describes the main
characteristics of the mice and how they affect the ac-
curacy and the applicability of the system. In Sec-
tion 5, we report the data related to some experiments
in order to show the effectiveness of our approach. Fi-
nally, we discuss related works in Section 6 and draw
conclusions in Section 7.
87
Bonarini A., Matteucci M. and Restelli M. (2004).
DEAD RECKONING FOR MOBILE ROBOTS USING TWO OPTICAL MICE.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 87-94
DOI: 10.5220/0001143000870094
Copyright
c
SciTePress
2 MOTIVATIONS
The classical dead reckoning methods, which use
the data measured by encoders on the wheels or on
the engine-axis, suffer from two main non-systematic
problems: slipping, which occurs when the encoders
measure a movement which is larger than the actually
performed one (e.g., when the wheels lose the grip
with the ground), and crawling, which is related to a
robot movement that is not measured by the encoders
(e.g., when the robot is pushed by an external force,
and the encoders cannot measure the displacement).
Our dead reckoning method, based on mice read-
ings, does not suffer from slipping problems, since
the sensors are not bound to any driving wheel. Also
the crawling problems are solved, since the mice go
on reading even when the robot movement is due to a
push, and not to the engines. The only problem that
this method can have is related to missed readings due
to a floor with a bad surface or when the distance be-
tween the mouse and the ground becomes too large
(see Section 4).
Another advantage of our approach is that it is in-
dependent from the kinematics of the robot, and so
we can use the same approach on several different
robots. For example, if we use classical systems, dead
reckoning with omni-directional robots equipped with
omnidirectional wheels may be very difficult both for
geometrical and for slipping reasons.
Furthermore, this is a very low-cost system which
can be easily interfaced with any platform. In fact, it
requires only two optical mice which can be placed
in any position under the robot, and can be connected
using the USB interface. This allows to build an accu-
rate dead reckoning system, which can be employed
on and ported to all the mobile robots which operate
in an environment with a ground that allows the mice
to measure the movements (indoor environments typ-
ically meet this requirement).
3 HOW TO COMPUTE THE
ROBOT POSE
In this section we present the geometrical derivation
that allows to compute the pose of a robot using the
readings of two mice placed below it in a fixed posi-
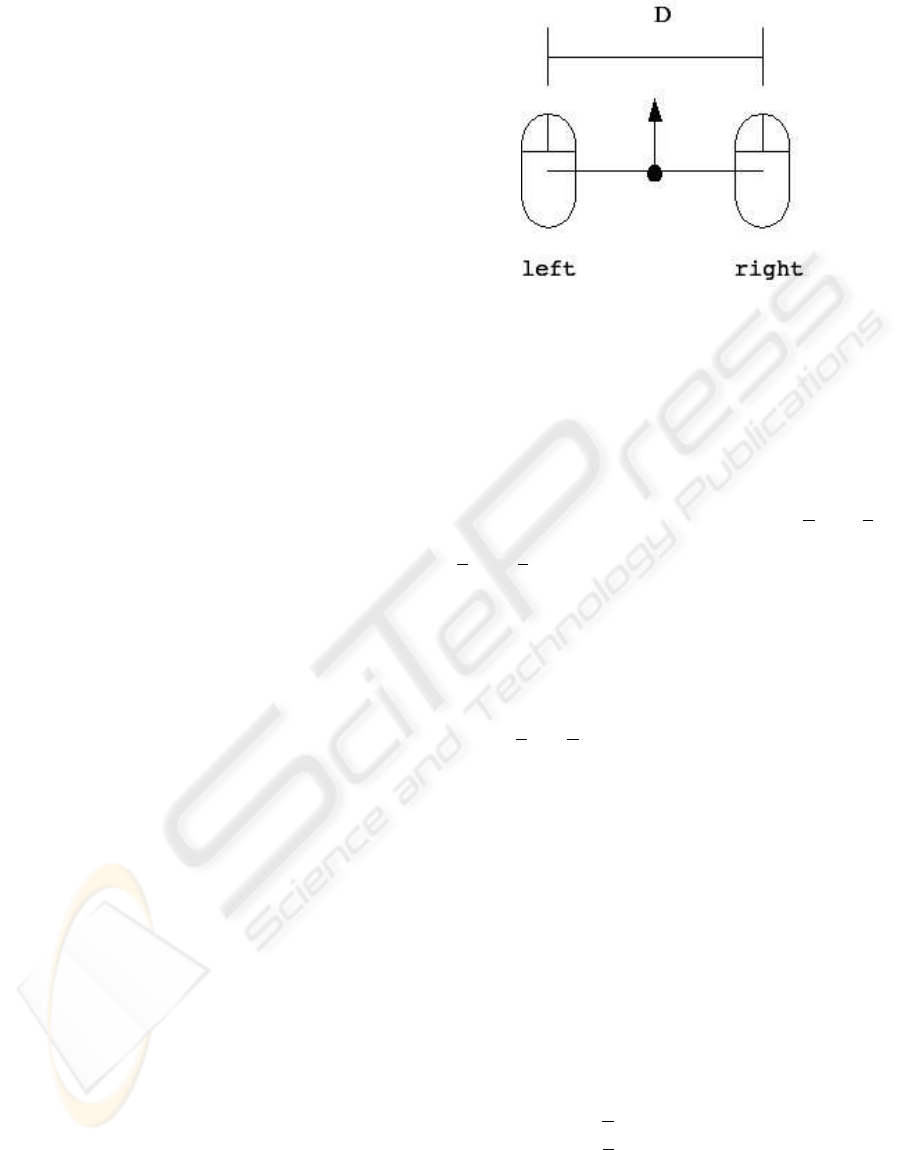
tion. For sake of ease, we place the mice at a certain
distance D, so that they are parallel between them and
orthogonal w.r.t. their joining line (see Figure 1). We
consider their mid-point as the position of the robot
and their direction (i.e., their longitudinal axis point-
ing toward their keys) as its orientation.
Each mouse measures its movement along its hori-
zontal and vertical axes. We hypothesize that, during
the sampling period (discussed in Section 4), the robot
Figure 1: The relative positioning of the two mice
moves with constant tangential and rotational speeds.
This implies that the robot movement can be approx-
imated by an arc of circumference. So, we have to
estimate the 3 parameters that describe the arc of cir-
cumference (i.e., the (x,y)-coordinates of the center
of the circumference and the arc angle), given the 4
readings taken from the two mice. We call x
r
and y
r
the measures taken by the mouse on the right, while
x
l
and y
l
are those taken by the mouse on the left.
Actually, we have only 3 independent data; in fact,
we have the constraint that the respective position of
the two mice cannot change. This means that the mice
should read always the same displacement along the
line that joins the centers of the two sensors. So, if
we place the mice as in Figure 1, we have that the
x-values measured by the two mice should be always
equal: x
l
= x
r
. In this way, we can compute how
much the robot pose has changed in terms of ∆x, ∆y,
and ∆θ.
If the robot makes an arc of circumference, it can
be shown that also each mouse will make an arc of cir-
cumference, which is characterized by the same cen-
ter and the same arc angle (but with a different radius).
During the sampling time, the angle α between the x-
axis of the mouse and the tangent to its trajectory does
not change. This implies that, when a mouse moves
along an arc of length l, it measures always the same
values independently from the radius of the arc (see
Figure 2). So, considering an arc with an infinite ra-
dius (i.e., a segment), we can write the following re-
lations:
x = l cos(α) (1)
y = l sin(α). (2)
From Equations 1 and 2, we can compute both the
angle between the x-axis of the mouse and the tangent
to the arc:
ICINCO 2004 - ROBOTICS AND AUTOMATION
88
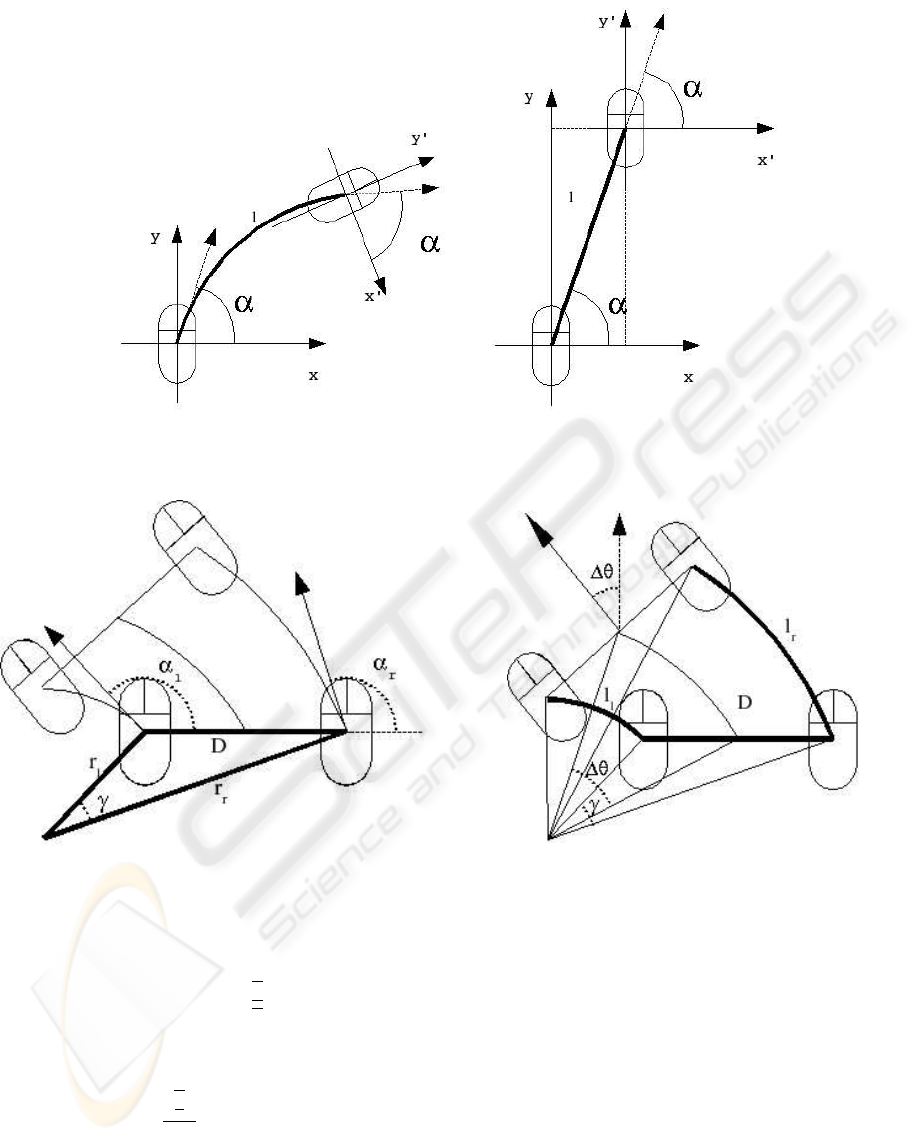
Figure 2: Two different paths in which the mouse readings are the same
Figure 3: The triangle made up of the joining lines and the
two radii
α = arctan
µ
y
x
¶
, (3)
and the length of the covered arc:
l =
½
|
x|, α = 0, π
y
sin α
, otherwise
(4)
In order to compute the orientation variation we ap-
ply the theorem of Carnot to the triangle made by the
joining line between the two mice and the two radii
between the mice and the center of their arcs (see Fig-
ure 3):
Figure 4: The angle arc of each mouse is equal to the change
in the orientation of the robot
D
2
= r
2
r
+ r
2
l
− 2 cos(γ)r
r
r
l
, (5)
where r
r
and r
l
are the radii related to the arc of cir-
cumferences described respectively by the mouse on
the right and the mouse on the left, while γ is the an-
gle between r
r
and r
l
. It is easy to show that γ can be
computed by the absolute value of the difference be-
tween α
l
and α
r
(which can be obtained by the mouse
measures using Equation 3): γ = |α
l
− α
r
|.
The radius r of an arc of circumference can be com-
puted by the ratio between the arc length l and the arc
angle θ. In our case, the two mice are associated to
arcs under the same angle, which corresponds to the
change in the orientation made by the robot, i.e. ∆θ
DEAD RECKONING FOR MOBILE ROBOTS USING TWO OPTICAL MICE
89
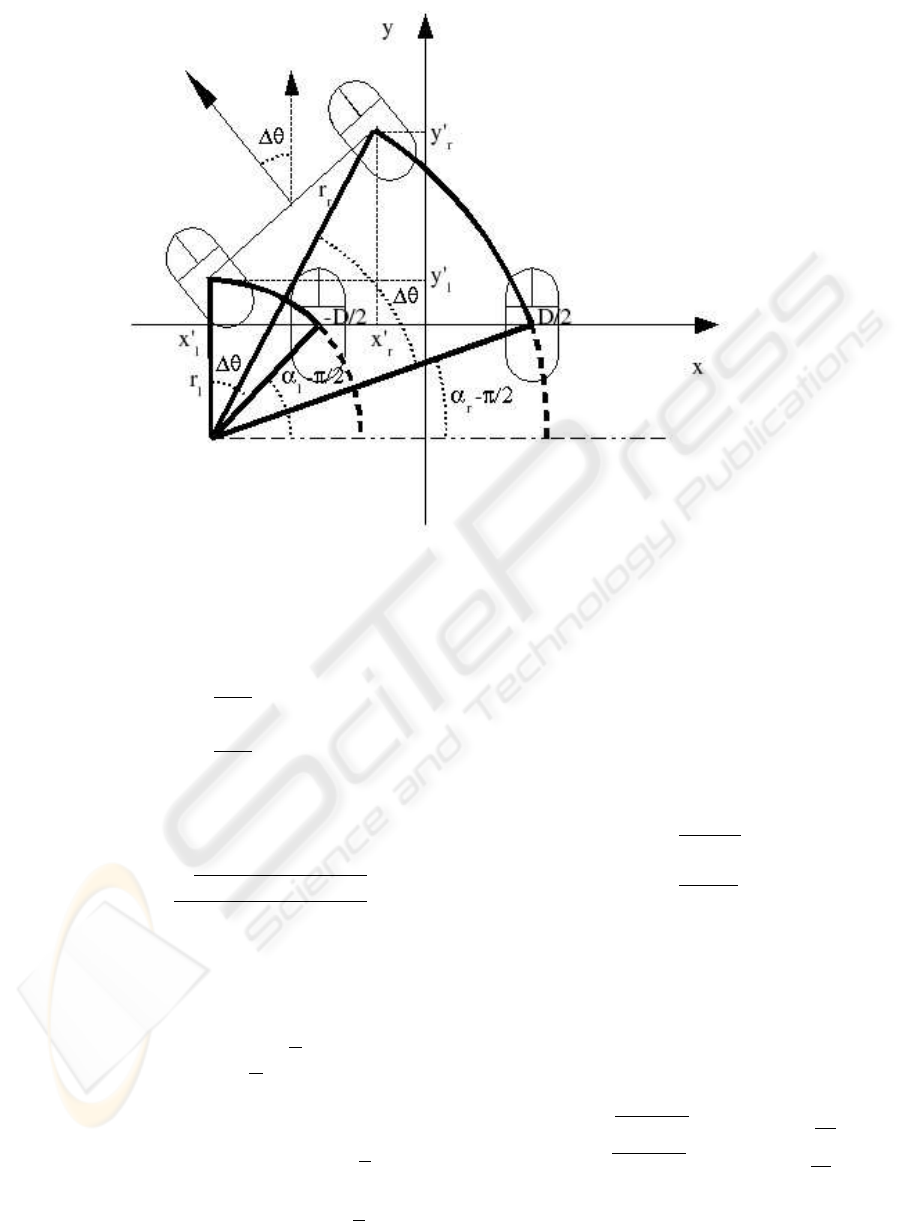
Figure 5: The movement made by each mouse
(see Figure 4). It follows that:
r
l
=
l
l
|∆θ|
(6)
r
r
=
l
r
|∆θ|
. (7)
If we substitute Equations 6 and 7 into Equation 5,
we can obtain the following expression for the orien-
tation variation:
∆θ = sign(y
r
− y
l
)
p
l
2
l
+ l
2
r
− 2 cos(γ)l
l
l
r
D
(8)
The movement along the x and y-axes can be de-
rived by considering the new positions reached by the
mice (w.r.t. the reference system centered in the old
robot position) and then computing the coordinates of
their mid-point (see Figure 5). The mouse on the left
starts from the point of coordinates (-
D
2
;0), while the
mouse on the right starts from (
D
2
;0). The formulas
for computing their coordinates at the end of the sam-
pling period are the following:
x
0
r
= r
r
(sin (α
r
+ ∆θ) − sin (α
r
)) sign(∆θ) +
D
2
(9)
y
0
r
= r
r
(cos (α
r
) − cos (α
r
+ ∆θ)) sign(∆θ) (10)
x
0
l
= r
l
(sin (α
l
+ ∆θ) − sin (α
l
)) sign(∆θ) −
D
2
(11)
y
0
l
= r
l
(cos (α
l
) − cos (α
l
+ ∆θ)) sign(∆θ). (12)
From the mice positions, we can compute the
movement executed by the robot during the sampling
time with respect to the reference system centered in
the old pose using the following formulas:
∆x =
x
0
r
+ x
0
l
2
(13)
∆y =
y
0
r
+ y
0
l
2
. (14)
The absolute coordinates of the robot pose at time
t + 1 (X
t+1
, Y
t+1
, Θ
t+1
) can be compute by know-
ing the absolute coordinates at time t and the rela-
tive movement carried out during the period (t; t + 1]
(∆x, ∆y, ∆θ) through these equations:
X
t+1
= X
t
+
q
∆x
2
+ ∆y
2
cos
µ
Θ
t
+ arctan
µ
∆y
∆x
¶¶
(15)
Y
t+1
= Y
t
+
q
∆x
2
+ ∆y
2
sin
µ
Θ
t
+ arctan
µ
∆y
∆x
¶¶
(16)
Θ
t+1
= Θ
t
+ ∆θ. (17)
ICINCO 2004 - ROBOTICS AND AUTOMATION
90
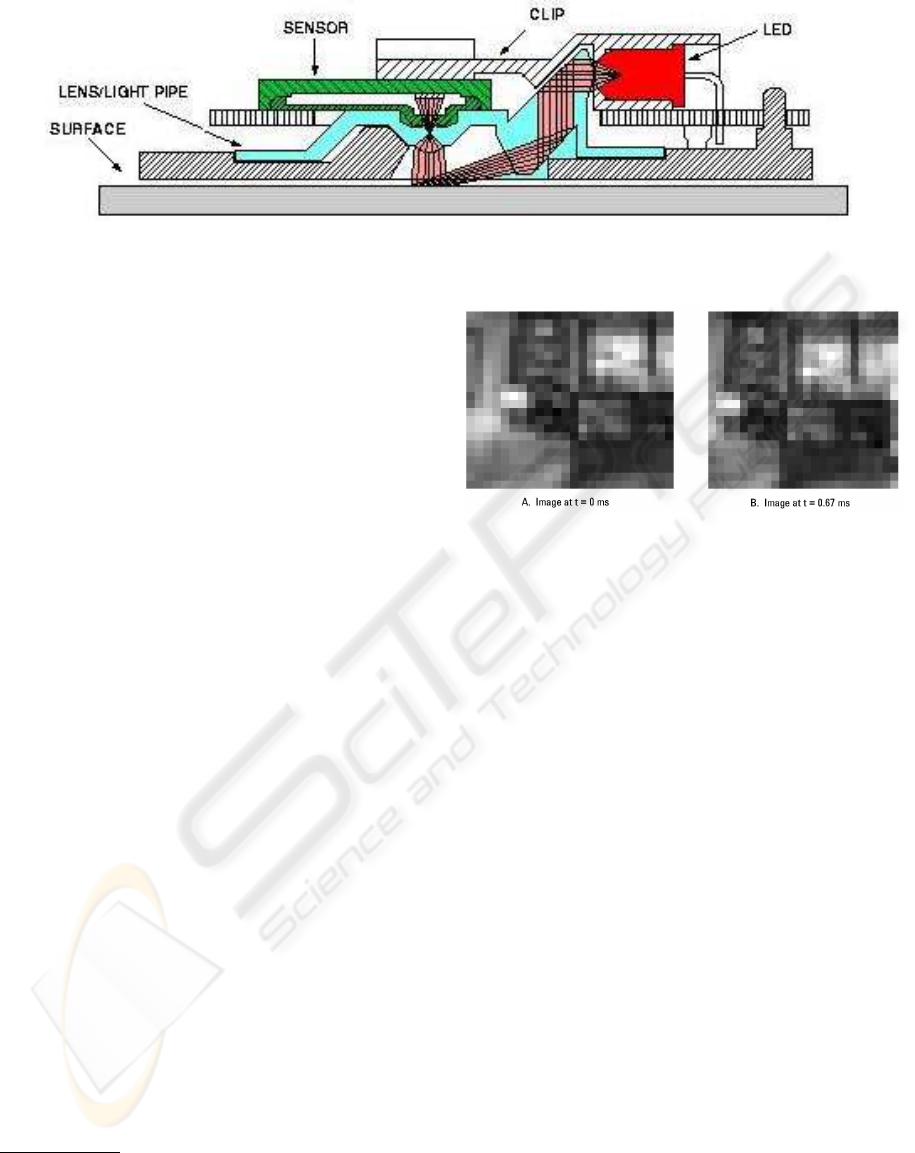
Figure 6: The schematic of an optical mouse
4 MICE CHARACTERISTICS
AND SYSTEM
PERFORMANCES
The performance of the odometry system we have de-
scribed depends on the characteristics of the solid-
state optical mouse sensor used to detect the dis-
placement of the mice. Commercial optical mice use
the Agilent ADNS-2051 sensor (Agilent Technolo-
gies Semiconductor Products Group, 2001) a low cost
integrated device which measures changes in posi-
tion by optically acquiring sequential surface images
(frames hereafter) and determining the direction and
magnitude of movement.
The main advantage of this sensor with respect to
traditional mechanical systems for movement detec-
tion is the absence of moving parts that could be dam-
aged by use or dust. Moreover it is not needed a
mechanical coupling of the sensor and the floor thus
allowing the detection of movement in case of slip-
ping and on many surfaces, including soft, glassy, and
curved pavements.
4.1 Sensor Characteristics
The ADNS-2051 sensor is essentially a tiny, high-
speed video camera coupled with an image proces-
sor, and a quadrature output converter (Agilent Tech-
nologies Semiconductor Products Group, 2003). As
schematically shown in Figure 6
1
, a light-emitting
diode (LED) illuminates the surface underneath the
sensorreflecting off microscopic textural features in
the area. A plastic lens collects the reflected light and
forms an image on a sensor. If you were to look at the
image, it would be a black-and-white picture of a tiny
section of the surface as the ones in Figure 7. The sen-
sor continuously takes pictures as the mouse moves at
1
Images reported in Figure 6, 7 and 8 are taken
from (Agilent Technologies Semiconductor Products
Group, 2001) and (Agilent Technologies Semiconductor
Products Group, 2003) and are copyright of Agilent Tech-
nologies Inc.
Figure 7: Two simple images taken from the mice. Beside
the noise you can notice the displacement of the pixels in
the images from right to left and top to bottom.
1500 frames per second or more, fast enough so that
sequential pictures overlap. The images are then sent
to the optical navigation engine for processing.
The optical navigation engine in the ADNS-2051
identifies texture or other features in the pictures and
tracks their motion. Figure 7 illustrates how this is
done by showing two images sequentially captured as
the mouse was panned to the right and upwards; much
of the same “visual material” can be recognized in
both frames. Through an Agilent proprietary image-
processing algorithm, the sensor identifies common
features between these two frames and determines the
distance between them; this information is then trans-
lated into ∆x and ∆y values to indicate the sensor
displacement.
By looking at the sensor characteristics, available
through the data sheet, it is possible to estimate
the precision of the measurement and the maximum
working speed of the device. The Agilent ADNS-
2051 sensor is programmable to give mouse builders
(this is the primary use of the device) 400 or 800 cpi
resolution, a motion rate of 14 inches per second, and
frame rates up to 2,300 frames per second. At recom-
mended operating conditions this allows a maximum
operating speed of 0.355 m/s with a maximum ac-
celeration of 1.47 m/s
2
.
These values are mostly due to the mouse sensor
(i.e., optical vs. mechanical) and the protocol used to
DEAD RECKONING FOR MOBILE ROBOTS USING TWO OPTICAL MICE
91
transmit the data to the computer. According to the
original PS/2 protocol, still used in mechanical de-
vices featuring a PS/2 connector, the ∆x and ∆y dis-
placements are reported using 9 bits (i.e., 1 byte plus
a sign bit) espressing values in the range from −255 to
+255. In these kind of mouse resolution can be set to
1, 2, 4, or 8 counts per mm and the sample rate can be
10, 20, 40, 60, 80, 100, and 200 samples per second.
The maximum speed allowed not to have an overflow
of the mouse internal counters is obtained by reducing
the resolution and increasing the sample rate. How-
ever, in modern mice with optical sensor and USB in-
terface these values are quite different, in fact the USB
standard for human computer interface (USB Imple-
menter’s Forum, 2001) restricts the range for ∆x and
∆y displacements to values from −128 to +127 and
the sample rate measured for a mouse featuring the
ADNS-2051 is 125 samples per second.
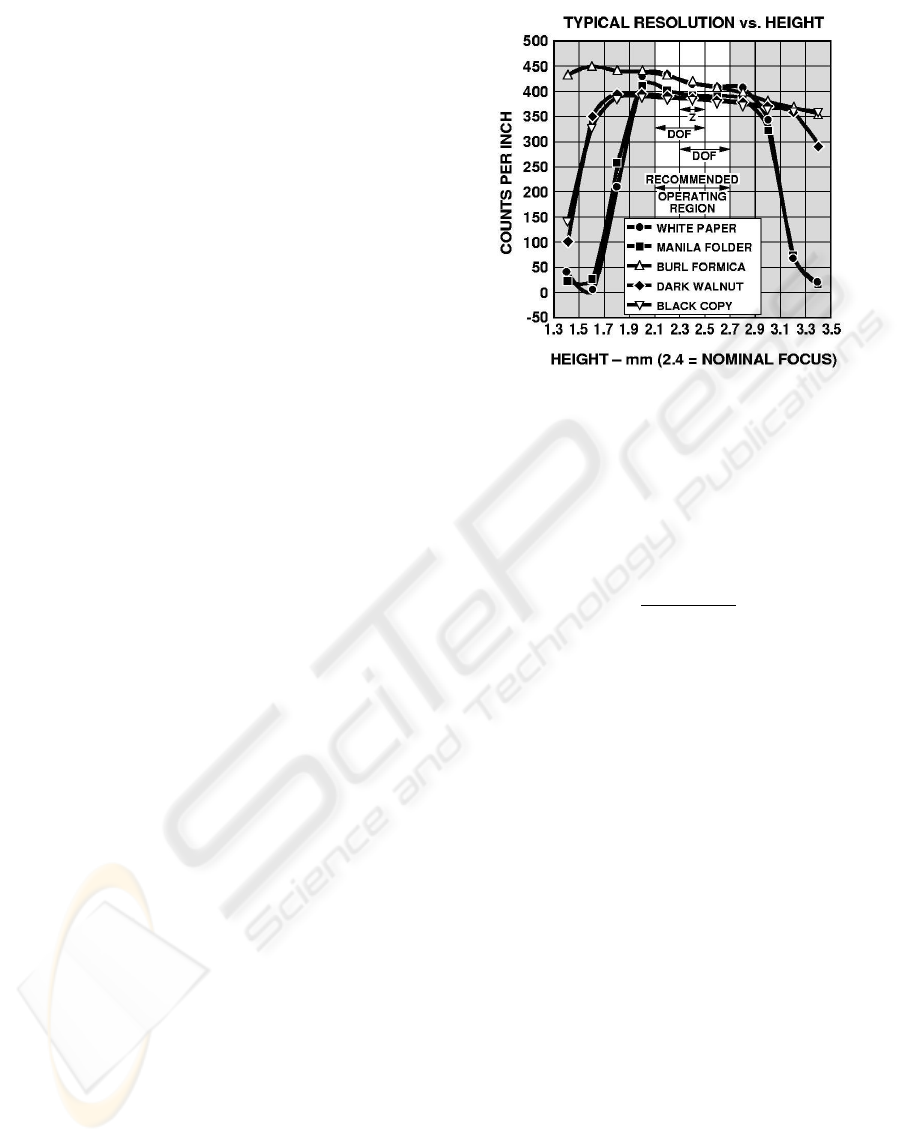
4.2 Mice Calibration Process
The numbers we have reported in the previous subsec-
tion reflect only nominal values for the sensor char-
acteristics since its resolution can vary depending on
the surface material and the height of the sensor from
the floor as described in Figure 8. This variation in
sensor readings calls for an accurate mounting on the
robot and a minimal calibration procedure before ap-
plying the formulas described in the previous section
in order to reduce systematic errors in odometry. In
fact systematic errors in odometry are often due to a
wrong assumptions on the model parameters and they
can be significantly reduced by experimental estima-
tion of right values. Our model systematic errors are
mostly due to the distance D between the mice and
the exact resolution of the sensors. To estimate the
last parameter, we have moved 10 times the mice on a
20 cm straight track and estimated in 17.73 the num-
ber of ticks per mm (i.e., 450 cpi) through the aver-
age counts for the mice ∆y displacements.
The estimation of the distance between the two
mice has been calibrated after resolution calibration
by using a different procedure. We rotated the two
mouse around their middle point for a fixed angle η
(π/2 rad in our experiments) and we measured again
their ∆y displacements. These two measures have to
be equal to assure we are rotating around the real mid-
dle point and the ∆x displacement should be equal to
zero when the mice are perpendicular to the radius.
Provided the last two constraints we can estimate their
distance according to the simple formula
D = ∆y/η. (18)
However, it is not necessary to rotate the mice
around their exact middle point, we can still estimate
their distance by rotating them around a fixed point
Figure 8: Typical resolution vs. Z (distance from lens refer-
ence plane to surface) for different surfaces
on the joining line and measuring the ∆y
1
and ∆y
2
.
Given these two measurements we can compute D by
using
D =
∆y
1
+ ∆y
2
η
. (19)
5 EXPERIMENTAL RESULTS
In order to validate our approach, we take two USB
optical mice featuring the Agilent ADNS-2051 sen-
sor, which can be commonly purchased in any com-
mercial store. We fix them as described in Section 3,
taking care of making them stay in contact with the
ground. We made our experiments on a carpet, like
those used in the RoboCup Middle Size League us-
ing the recommended operating setting for the sensor
(i.e., nominally 400 cpi at 1500 frames per second)
and calibrating the resolution to 450 cpi and the dis-
tance D between the mice to 270 mm with the pro-
cedure previously described.
The preliminary test we made is the UMBmark
test, which was presented by (Borenstein and Feng,
1994). The UMBmark procedure consists of measur-
ing the absolute actual position of the robot in or-
der to initialize the on-board dead reckoning start-
ing position. Then, we make the robot travel along
a 4x4 m square in the following way: the robot stops
after each 4m straight leg and then it makes a 90
o
turn on the spot. When the robot reaches the starting
area, we measure its absolute position and orientation
and compare them to the position and orientation cal-
culated by the dead reckoning system. We repeated
ICINCO 2004 - ROBOTICS AND AUTOMATION
92

this procedure five times in clockwise direction and
five times in counter-clockwise. The measure of dead
reckoning accuracy for systematic errors that we ob-
tained is E
max,syst
= 114 mm, which is compara-
ble with those achieved by other dead reckoning sys-
tems (Borenstein and Feng, 1996).
6 RELATED WORKS
As we said in Section 1, Mobile Robot Position-
ing has been one of the first problem in Robotics
and odometry is the most widely used navigation
method for mobile robot positioning. Classical odom-
etry methods based on dead reckoning are inexpen-
sive and allow very high sample rates providing good
short-term accuracy. Despite its limitations, many re-
searcher agree that odometry is an important part of
a robot navigation system and that navigation tasks
will be simplified if odometric accuracy could be im-
proved.
The fundamental idea of dead reckoning is the inte-
gration of incremental motion information over time,
which leads inevitably to the unbounded accumula-
tion of errors. Specifically, orientation errors will
cause large lateral position errors, which increase pro-
portionally with the distance traveled by the robot.
There have been a lot of work in this field especially
for differential drive kinematics and for systematic er-
ror measurement, comparison and correction (Boren-
stein and Feng, 1996).
First works in odometry error correction were
done by using and external compliant linkage vehicle
pulled by the mobile robot. Being pulled this vehicle
does not suffer from slipping and the measurement
of its displacing can be used to correct pulling robot
odometry (Borenstein, 1995). In (Borenstein and
Feng, 1996) the authors propose a practical method
for reducing, in a typical differential drive mobile
robot, incremental odometry errors caused by kine-
matic imperfections of mobile encoders mounted onto
the two drive motors.
Little work has been done for different kinemat-
ics like the ones based on omnidirectional wheels. In
these cases, slipping is always present during the mo-
tion and classical shaft encoder measurement leads
to very large errors. In (Amini et al., 2003) the Per-
sia RoboCup team proposes a new odometric system
which was employed on their full omni-directional
robots. In order to reduce non-systematic errors,
like those due to slippage during acceleration, they
separate odometry sensors from the driving wheels.
In particular, they have used three omni-directional
wheels coupled with shaft encoders placed 60
o
apart
of the main driving wheels. The odometric wheels are
connected to the robot body through a flexible struc-
ture in order to minimize the slippage and to obtain a
firm contact of the wheels with the ground. Also this
approach is independent from the kinematics of the
robot, but its realization is quite difficult and, how-
ever, it is affected by (small) slippage problems.
An optical mouse was used in the localization sys-
tem presented in (Santos et al., 2002). In their ap-
proach, the robot is equipped with an analogue com-
pass and an optical odometer made out from a com-
mercially available mouse. The position is obtained
by combining the linear distance covered by the robot,
read from the odometer, with the respective instanta-
neous orientation, read from the compass. The main
drawback of this system is due to the low accuracy of
the compass which results in systematic errors.
However, odometry is inevitably affected by the
unbounded accumulation of errors. In particular, ori-
entation errors will cause large position errors, which
increase proportionally with the distance travelled by
the robot. There are several works that propose meth-
ods for fusing odometric data with absolute position
measurements to obtain more reliable position esti-
mation (Cox, 1991; Chenavier and Crowley, 1992).
7 CONCLUSIONS
We have presented a dead reckoning sensor based on
a pair of optical mice. The main advantages are good
performances w.r.t. the two main problems that affect
dead reckoning sensors: slipping and crawling. On
the other hand, this odometric system needs that the
robot operates on a ground with a surface on which
the mice always read with the same resolution.
Due to its characteristics, the proposed sensor can
be successfully applied with many different robot ar-
chitectures, being completely independent from the
specific kinematics. In particular, we have developed
it for our omnidirectional Robocup robots, which will
be presented at Robocup 2004.
REFERENCES
Agilent Technologies Semiconductor Products Group
(2001). Optical mice and hiw they work: The optical
mouse is a complete imaging system in a tiny pack-
age. Technical Report 5988-4554EN, Agilent Tech-
nologies Inc.
Agilent Technologies Semiconductor Products Group
(2003). Agilent adns-2051 optical mouse sesor data
sheet. Technical Report 5988-8577EN, Agilent Tech-
nologies Inc.
Amini, P., Panah, M. D., and Moballegh, H. (2003). A new
odometry system to reduce asymmetric errors for om-
DEAD RECKONING FOR MOBILE ROBOTS USING TWO OPTICAL MICE
93

nidirectional mobile robots. In RoboCup 2003: Robot
Soccer World Cup VII.
Borenstein, J. (1995). Internal correction of dead-reckoning
errors with the compliant linkage vehicle. Journal of
Robotic Systems, 12(4):257–273.
Borenstein, J. and Feng, L. (1994). UMBmark - a
method for measuring, comparing, and correcting
dead-reckoning errors in mobile robots. In Proceed-
ings of SPIE Conference on Mobile Robots, Philadel-
phia.
Borenstein, J. and Feng, L. (1996). Measurement and
correction od systematic odometry errors in mobile
robots. IEEE Transactions on Robotics and Automa-
tion, 12(6):869–880.
Chenavier, F. and Crowley, J. (1992). Position estima-
tion for a mobile robot using vision and odometry.
In Proceedings of IEEE International Conference on
Robotics and Automation, pages 2588–2593, Nice,
France.
Cox, I. (1991). Blanche - an experiment in guidance and
navigation of an autonomous mobile robot. IEEE
Transactions on Robotics and Automation, 7(3):193–
204.
Santos, F. M., Silva, V. F., and Almeida, L. M. (2002). A
robust self-localization system for a small mobile au-
tonomous robot. In Preceedings of ISRA.
USB Implementer’s Forum (2001). Universal serial bus:
Device class definition for human interface devices.
Technical Report 1.11, USB.
ICINCO 2004 - ROBOTICS AND AUTOMATION
94
