
A DECENTRALIZED ROUTE GUIDANCE ALGORITHM IN
URBAN TRANSPORTATION NETWORKS
Ludovica Adacher, Gaia Nicosia
Dipartimento di Informatica e Automazione, Università Roma Tre, Rome, Italy
Keywords: Shortest Path, Intelligent Trans
portation Systems, Route Guidance.
Abstract: In the last decades, due to the increasing car traffic and the limited capacity of urban networks, algorithms
for traffic management and route guidance are becoming more and more important. GPS technology can be
used for fleet monitoring in urban or suburban areas, from a central monitoring station and may provide
useful information concerning the movement of all vehicles. Current route guidance systems are simple
from an algorithmic point of view (they compute shortest paths to the destination), but they have to deal
with huge size networks. For this reason, a decentralized approach, in which each vehicle independently
calculates its own route, is desirable. Naturally, to limit the congestion due the vehicles decisions, an
estimate on the different possible routes is required. Hence, we propose a decentralized algorithm in which
each vehicle computes its own route on the basis of the traffic information provided by the reference station.
Moreover, we propose a method for forcing vehicles to choose different paths and for informing the
reference station on the routes of all vehicles, so that traffic forecast is updated.
1 INTRODUCTION
The steadily growing car traffic and the limited
capacity of our streets demonstrate the necessity of
designing methods for better traffic management.
Studies [Jahn et al. 1999] show that an individual
“blind” choice of routes leads to travel times that are
between 6% and 19% longer than necessary.
Electronic and sensory devices are becoming more
popular and they provide or will shortly provide
detailed information about the actual traffic flows,
thus making available the necessary data to employ
better means of traffic management. So, the focus is
on developing Intelligent Transportation Systems
that are capable of better managing existing capacity
and encouraging more efficient vehicle routing over
time and space.
Many vehicles get equipped with the so-called
ro
ute guidance systems. They guide the driver from
the origin to the destination by visual and acoustic
indicators. These systems in order to compute their
routes need digital maps, the current position
obtained by Global Position Systems (GPS), and
possibly up-to-date traffic data, which are broadcast
by radio or cellular phone. Most inefficiencies
caused by human route choice can be reduced by
route guidance systems, obtaining a better use of the
whole network. Unfortunately, many simulations
also predict that these benefits will be lost once the
number of equipped vehicles exceeds a certain
threshold. In fact, it is possible that such system
actually causes congestion, if the algorithms try to
minimize the individual journey time of each driver
separately, without taking into account the effects of
their own route recommendation. Thus, the need for
integrated algorithms that actually take into
consideration the overall road usage (which can be
viewed as the sum of all individual journey times)
has been recognized.
2 BASIC STRUCTURE OF ROUTE
GUIDANCE PROBLEMS
In the literature there are essential two different
approaches to route guidance problems: one
researches the system optimum, the other the user
equilibrium. When the interest is in minimizing the
total travel time, the best is to consider a global
perspective and compute the system optimum. In this
case, the existing road network may carry more
traffic [Wardrop 1952]. Unfortunately, this policy
may route some drivers on unacceptable long paths
in order to use shorter path for many other drivers.
The length of a route in the system optimum can be
318
Adacher L. and Nicosia G. (2004).
A DECENTRALIZED ROUTE GUIDANCE ALGORITHM IN URBAN TRANSPORTATION NETWORKS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 318-321
DOI: 10.5220/0001145603180321
Copyright
c
SciTePress
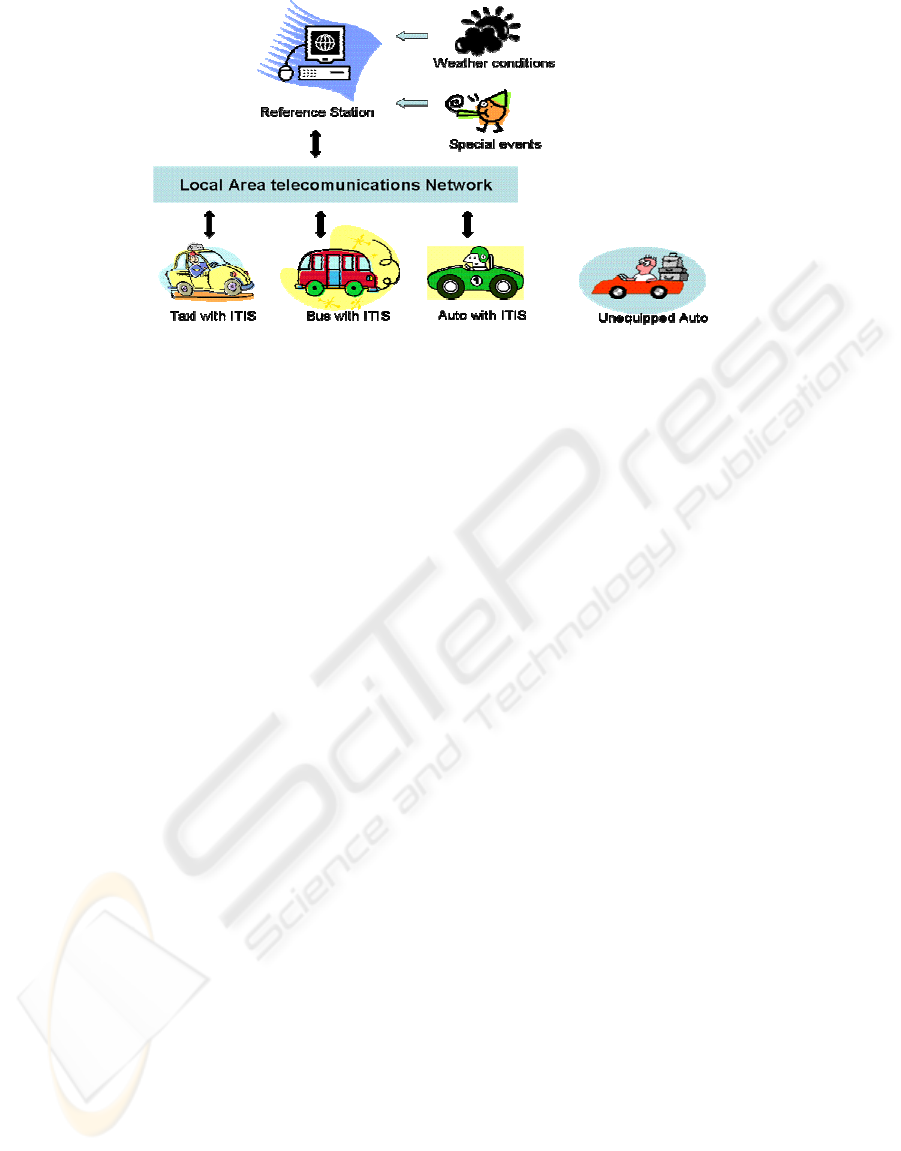
Figure 1: Conceptualized distributed transportation network.
significantly higher than in the user equilibrium
[Roughgarden and Tardos 2000]. The main
drawback of this approach is that after a while a user
may be unsatisfied and stop using the route guidance
system.
On the other hand, when minimizing individual
journey times of each driver, we can be far from the
system equilibrium. Many algorithms try to
minimize individual journey times, without taking
into account the effects of their route
recommendation. Under current systems, many
drivers could be given exactly the same route
recommendation. Therefore, assuming similar mean
speed, some drivers may always stay together on
their trip (platooning), and this may possibly lead to
congestion. While Adler and Blue [1998] call this
phenomenon oversaturation, Ben-Alkiva. De Palma
and Kaysi [1991] call it overreaction, since too
many drivers follow the recommended route. To
deal with this problem, it is essential to split
platoons over several paths (multiple path routing).
Many authors have proposed different approaches to
deal with multiple path routing. Rilett and Van
Aerde [1996] suggest adding individual random
error terms to the road travel times broadcast by a
central controller, in order to cause the in-vehicle
computers to choose different paths. Lee [1994]
computes k-shortest every ten minutes and then
distributes drivers over them every two minutes,
considering the current travel times on these paths.
Another popular approach is to route drivers
along the paths of so-called user equilibrium, so that
no driver can get a quicker path through the network
by unilaterally changing his route [Fresz T. L.,
1985]. This concept was introduced to model natural
driver behaviour and it has been studied extensively
in the literature.
In our work we assume that connected users are
provided with an Intelligent Traveller Information
System (ITIS) capable of providing route guidance
and/or traffic advice both pre-trip and while en-
route. ITIS is a term coined by Adler and Blue
[2002] to describe next generation information
devices that can gather and process information as
well as learn and represent user preferences and
behaviour.
3 PROBLEM DEFINITON AND
PROPERTIES
A traffic network, represented by a direct graph G=
(N,A), consists of a set of |N| of nodes and a set of |A|
links. Consider a situation in which a vehicle with
ITIS (Intelligent Traveller Information System, see
Figure 1) is currently travelling on link (i,s) towards
the destination node d, we want find on which link
(s,j) the vehicle should enter next, so as to minimize
the expected travel time to the destination node d.
It is assumed that the local controller (i.e. a
vehicle with ITIS) has available complete
information on the topology of sub network G′ (the
network representing all candidate paths from origin
o to destination d of the interested vehicle) and
current estimates of travel times on individual links.
Traffic flows have two important features that
make them difficult to study mathematically. One is
“congestion”, and the other is “time”. Congestion
captures the fact that travel times increase with the
amount of flow on the streets, while time refers to
the movement of vehicles along paths as “flow over
time”.
Congestion implies that transit time t
e
is not a
constant, but monotonically increases with the
augmentation of the flow value x
e
..
Flow variation over time is an important feature
in network flow problem arising in various
applications such as road or air traffic control,
production systems, and communication network.
A DECENTRALIZED ROUTE GUIDANCE ALGORITHM IN URBAN TRANSPORTATION NETWORKS
319
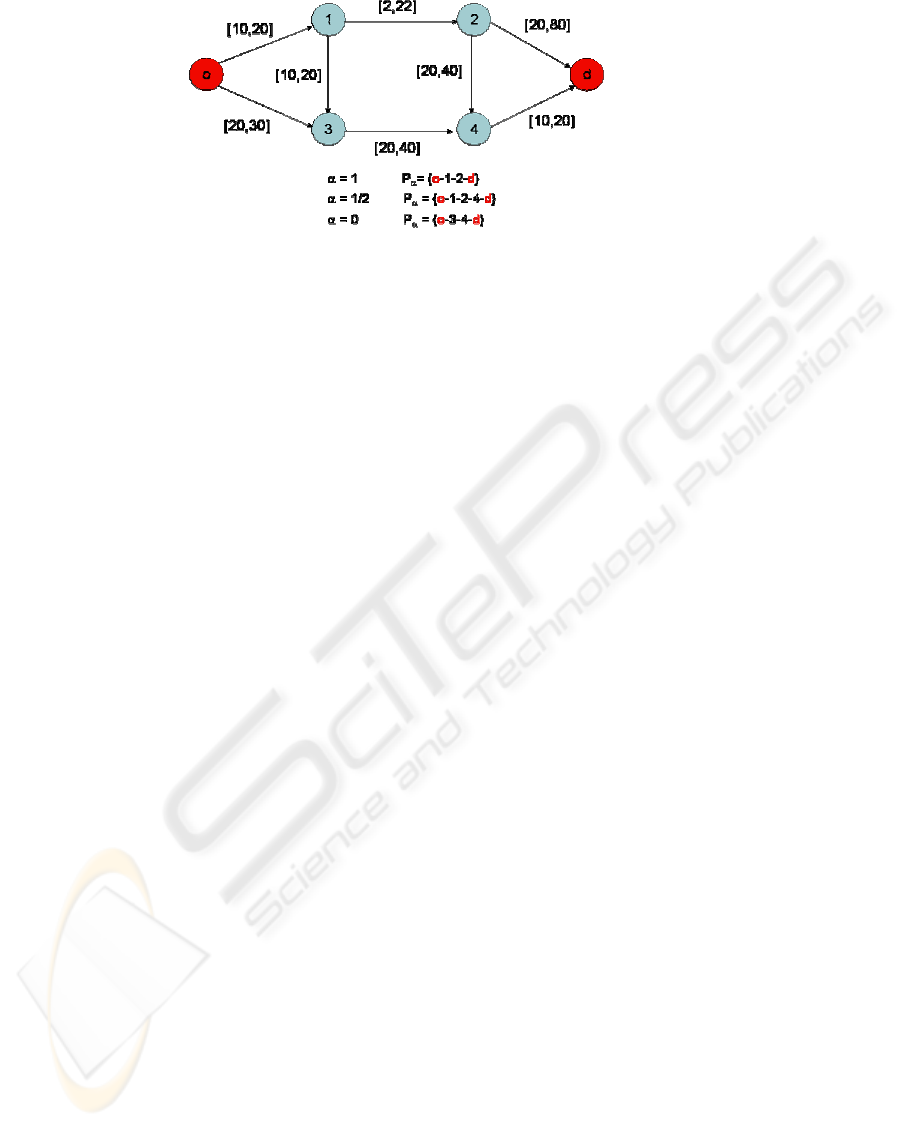
Figure 2: A very simple example.
Ford and Fulkerson [1958] observe that flow-over-
time problems in a given network with transit times
on the arcs can be transformed into equivalent static
flow problems in the corresponding time expanded
network.
4 DECENTRALIZED APPROACH
In many different areas of manufacturing, traffic
network, medicine, software engineering and etc.,
the decentralized approach reaches good
performances. Obviously, when all data are
available and of reasonable size, it is always possible
to use a centralized approach.
Naturally, a user will buy a route guidance
system only if he can obtain a benefit, but a system
optimum is not always a good solution from a user
point of view. Probably, a driver is induced to use a
route guidance system, if he/she is confident and
sure that the recommended route is always a good
route for him/her. In our work, we consider a
decentralized decision approach, where each driver
selects his/her route, on the basis of the traffic on the
network.
We consider a hierarchical structure with two
different levels: at a high level there is a reference
station, that represents a sort of real time database,
where all information related to the traffic on the
network are available; at the local level is present a
local controller (Intelligent Traveller Information
System ITIS). The reference station is responsible for
management functions such as collecting and storing
data, gathered from the network, and disseminating
traveller information.
Figure 1 depicts the set of travellers and flow
entities seeking to travel through the network.
4.1 Path computation
Each vehicle with ITIS calculates its path from the
origin o to destination d on the basis of some
information that is exchanged with the reference
station. For each link of the traffic network we know
the estimated minimum transit time t
e
min
and the
estimated maximum transit time t
e
max
. These two
parameters are calculated at the high level on the
basis of real-time, collected and stored data. For
each link e
t
e
min
is a lower bound on the transit time
(dependent on flow) on e;
t
e
max
is an upper bound on the transit time
(dependent on flow) on e.
As we will discuss in the next section, the value
t
e
max
can be calculated also by considering the
vehicles that are in the network, but have not
decided their route yet.
Each vehicle v , when computing its optimal
route from o
v
to d
v
, assumes that the transit time on
arc e is:
t
e
= α
v
t
e
min
+ (1- α
v
) t
e
max
The parameter
α
v
is a characteristic of the ITIS,
it is a real number
α
v
∈[0,1]. This characteristic
index
α
v
of the vehicle allows us to determine
different paths and avoid congestion on some links.
A very simple example in which different paths
corresponds to different values for
α
v
is depicted in
Figure 2.
4.1.1 Potential flow evaluation
We introduce the concept of potential flow as a way
of providing an estimate on transit times in the
immediate future by considering vehicles with ITIS
that are in the network, but have not decided their
route yet. Then, the potential flow represents all
users that have requested information on the traffic
of the network but have not calculated their personal
route yet. Naturally, it is necessary to have an
evaluation of these potential users to eliminate the
platooning effect.
Here, we consider two different ways to calculate
potential flow (in Figure 3 there is an example of the
two different potential flow evaluations). Since
traffic networks are usually very large and since
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
320
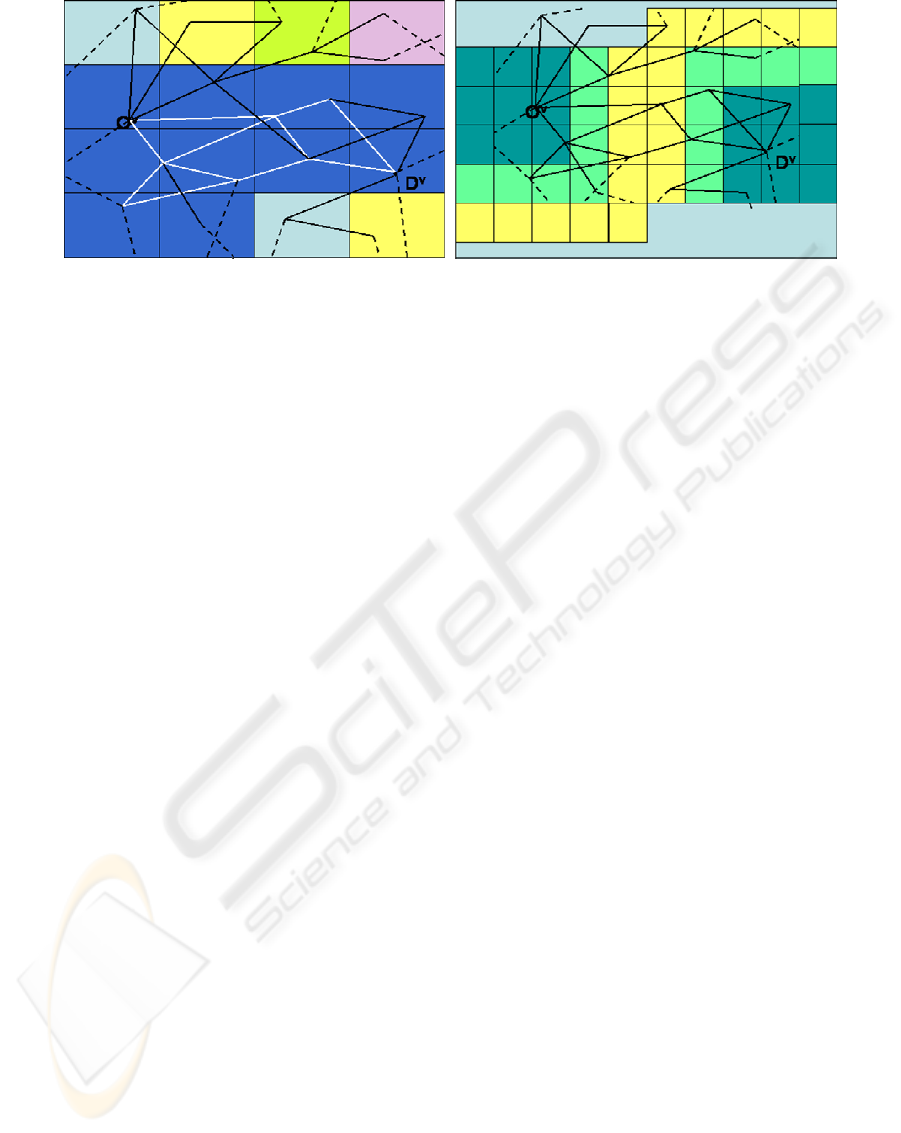
Figure 3: An example of potential flow evaluation in cases (a) and (b).
detailed information might not be necessary, we
divide the network G in different areas or sectors
and we proceed as follows.
Case (a): For each vehicle v we consider all paths
not exceeding a certain length from its origin o
v
to
destination d
v
. A vehicle v is part of a potential
flow for a sector s if an arc of its path is in sector
s.
Case (b): For each vehicle v we consider a fixed
dimension (D) neighborhood of its origin o
v
and
its destination d
v
. This dimension D is related to
the dimension of the sector. The neighbourhoods
grow until they meet each other and the
dimension of the overlapping area is at least D (in
Figure 4, there is an example with D=3). A
vehicle v is a part of a potential flow for every arc
in the neighbourhoods.
We are currently running some tests in order to
evaluate which level of information is requested to
obtain a good solution and to determine the best
tradeoffs between detailed information and running
times.
5 CONCLUSIONS
In this work we are trying to utilize decentralized
approach for a hard problem like the route-guidance
problem. We have proposed a simple approach to
find a compromise between single users satisfaction
and global utilization of the network.
We are still at a preliminary stage of our
research. We are setting up a simulation, using
algorithm A* to calculate shortest paths, in order to
evaluate how the different choices for
α
v
lead to
different paths.
REFERENCES
Adler J. L., Blue V. J., 1998. Toward the design of
intelligent traveller information systems.
Transportation Research C, 6:157-172.
Adler J. L., Blue V. J, 2002. A cooperative Multi-agent
transportation management and route guidance
system. Transportation Research C. 433-454.
Ben-Akiva M. E., De Palma A. , and Kaysi I., 1991.
Dynamic network models and driver . Transportation
Research A, 25:251-266.
Ford L. R., Fulkerson D. R., 1958. Constructing maximal
dynamic flows from static flows. Operations Research
6: 418-433.
Fresz T. L., 1985. Transportation network equilibrium
design and aggregation: key development and
research opportunities. Transportation Research A.,
19:413-427.
Jahn O., Möhring R. H., Schulz A. S., Stier Moses N. E.,
2002. System Optimal Routing of Traffic Flows with
User Constraints in Networks with Congestion,
Technical Report 754/2002 Technische Universität
Berlin.
Jahn O., Möhring R. H., Schulz A. S., 1999. Optimal
Routing of Traffic flows with length restrictions in
networks with congestion. Technical Report 658/1999
Technische Universität Berlin.
Lee C. K., 1994. A multiple-path routing strategy for route
guidance systems. Transportation research C, 2:185-
195.
Rilett L.R., van Aerde M. W., 1991. Modeling distributed
real-time guidance strategies in a traffic network that
exhibits the Braess paradox. In proceedings of IEEE
Vehicle Navigation and Information Systems
Conference.
Roughgarden T., Tardos E., 2000. How bad is selfish
routing?. In proc. of the 41
st
annual IEEE, symposium
on foundation of computer science FOX’00.
Wardrop J. G., 1952. Some theoretical aspects of road
traffic research ,Proceeding of the Institution of civil
engineers.
A DECENTRALIZED ROUTE GUIDANCE ALGORITHM IN URBAN TRANSPORTATION NETWORKS
321
