
ELECTROMYOGRAPHY BASED FINGER MOVEMENT
IDENTIFICATION FOR HUMAN COMPUTER INTERFACE
Pah Nemuel D, Kumar Dinesh K
School of Electrical and Computer Engineering RMIT University GPO Box 2476 Melbourne,VIC 3001,Australia
Keywords: Surface Electromyogram, Wavelet Network, Neural Networks, and Rehabilitation.
Abstract: This paper reports experiments conducted to classify single channel Surface Electromyogram recorded from
the forearm with the flexion and extension of the different fingers. Controlled experiments were conducted
where single channel SEMF was recorded from the flexor digitorum superficialis muscle for various finger
positions from the volunteers. A modified wavelet network called Thresholding Wavelet Networks that has
been developed by the authors (D Kumar, 2003) has been applied for this classification. The purpose of this
research was towards developing a reliable man machine interface that could have applications for
rehabilitation, robotics and industry. The network is promising with accuracy better than 85%.
1 INTRODUCTION
With greatly improved computational power, and
use of computers having exploded into every walk
of life, there is a greater need for flexible, natural
and reliable human computer interface. Hand
movement gestures play a very important role in the
interactions between people. But most of the
interaction with computers is based static events
such as a key press, and the information contained in
the dynamic gesture is lost, greatly reducing the
scope of machine interaction. There is thus need for
simple and reliable methods for human hand action
identification by machines. This paper reports a new
technique for automatic recognition of human hand
movements.
Skeletal movement is caused by or prevented by
muscle contraction. Muscle contraction is a result of
electrical stimulation received from the nerves to
individual muscle fibres. The resultant electrical
activity can be recorded by electrodes kept in the
close proximity of the muscles. Surface
electromyography (SEMG) (J Cram, 1998) is the
recording of the electrical activity of skeletal muscle
from the skin surface. It is a result of the
superposition of a large number of transients
(muscle action potentials) that have temporal and
spatial separation that is semi-random.
SEMG signal is the electrical recording from the
surface and represents the summation of the
electrical activity from all the muscle fibres and thus
the summation of all Motor Unit Action Potentials
(MUAP) in the region of the electrodes. The origin
of each of the MUAP is inherently random, non-
stationary, and the electrical characteristics of the
surrounding tissues are non-linear. Distribution of
the magnitude of SEMG can be approximated by a
Gausian function (J Cram, 1998).
SEMG is used for a number of applications
including control of Human Computer Interface
(HCI), prosthesis control (Hudgins, 1993, D Graupe,
1975,F Chan, 2000), muscle diagnostic and
biofeedback. Amplitude and spectral information of
EMG have also been exploited to estimate muscle
fatigue and force of muscle contraction and torque
(K Englehart, 1999). These applications require
automated analysis and classification of SEMG. The
complexity of the signal makes this a challenging
task. The authors have reported using combination
of three channels SEMG from the forearm to
identify the hand action. The difficulty of using
multiple channels is the need for precise positioning
of the electrodes by an expert.
For automated classification of SEMG related to
movement, it is essential to develop the system that
can extract appropriate features of SEMG with
respect to the movement and have a mechanism for
relating these features to the movement generating
the signal without the need for multiple channels.
The earlier SEMG classification techniques were
based on the statistical analysis of the signal
properties (Hudgins, 1993). Auto Regressive (AR)
221
Nemuel D. P. and Dinesh K K. (2004).
ELECTROMYOGRAPHY BASED FINGER MOVEMENT IDENTIFICATION FOR HUMAN COMPUTER INTERFACE.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 221-226
DOI: 10.5220/0001146902210226
Copyright
c
SciTePress
model (Graupe, 1975), of the SEMG signals
representing limb positions and were able to classify
a single channel recording with 85% success rate.
The techniques relied on the fixed thresholding
levels determined by manual inspection of the
tendency of the signal’s parameters. But this system
was highly dependent on the subject and recording
and required high degree of manual intervention.
Hudgins et al (Hudgins, 1993) reported the first
major work of SEMG classification using Artificial
Neural Networks (ANN). The ANN was used to
introduce the flexibility and self-learning ability to
the classification technique. The accuracy of the
classification technique was ranging from 80% to
90%. However, the technique was only applied to
the initial stage of the contraction. The technique is
sensitive to the window size and the appropriate
selection of the signal’s features (F Chan, 2000).
Englehart (K Englehart, 1999,K Englehart,
2001), the authors (D Kumar, 2003) and others have
reported the results of classification of SEMG
against resultant movement and muscle status using
various signal features. Some of the features
reported include time domain features, Short Time
Fourier transform (STFT), Wavelet Transform (WT)
and Wavelet Packet Transform (WPT). It has been
reported that WT and WPT were superior in the
classification SEMG against muscle status during
steady-state contraction. It has also been reported
that the technique was sensitive to the appropriate
selection of signal features to be included in the
classification and that the technique could be
improved by including the adaptive feature selection
process.
The Thresholding Wavelet Network (TWN) has
been developed by the authors (D Kumar, 2003) and
has been applied in this paper for SEMG
classification. This combines the WT, ANN and
wavelet thresholding. The combination enables the
network to extract time-scale features from the
signal and adaptively select the appropriate features
for the classification task. This paper reports the
architecture of the network and the network’s
performance in the classification of SEMG recorded
for various finger movements.
This paper is organised into six sections. Section
2 reviews the basic concept of WT and wavelet
networks while Section 3 details the architecture and
learning process of the TWN. Section 4 presents the
experimental method and results while Section 5
discusses the results. Section 6 concludes the paper.
2 THEORETICAL BACKGROUND
A. Wavelet Networks
Wavelet network (S Mallat, 1999) is a class of ANN
(D Kumar, 2003, M Hagan, 1996) that includes WT
in its algorithm. The combination provides a tool
that can calculate wavelet coefficient in parallel
mode and adaptively select the proper wavelet
coefficients for the approximation or classification
task. The wavelet networks are grouped in two
different categories:
Approximation Wavelet Networks (AWN):
Wavelet networks are designed for the purpose of
function approximation or representation and
iteratively generate the wavelet coefficients as well
the inverse wavelet transforms to approximate the
signal.
Classification Wavelet Networks (CWN):
Wavelet networks that are designed for the purpose
of function classification. These are based on
computing and determining the wavelet coefficients
to classify the signal.
AWN optimises its parameters based on a cost
function that is sensitive to energy content. The
approximation is only useful in a classification task
if the distinguishing factors are immersed in the
high-energy region of the signal. But the features
that discriminate a class of SEMG signals from the
other classes are not necessarily immersed in the
high-energy region of the signal.
The basic principle of CWN is to iteratively
locate wavelet coefficients (scale and translation)
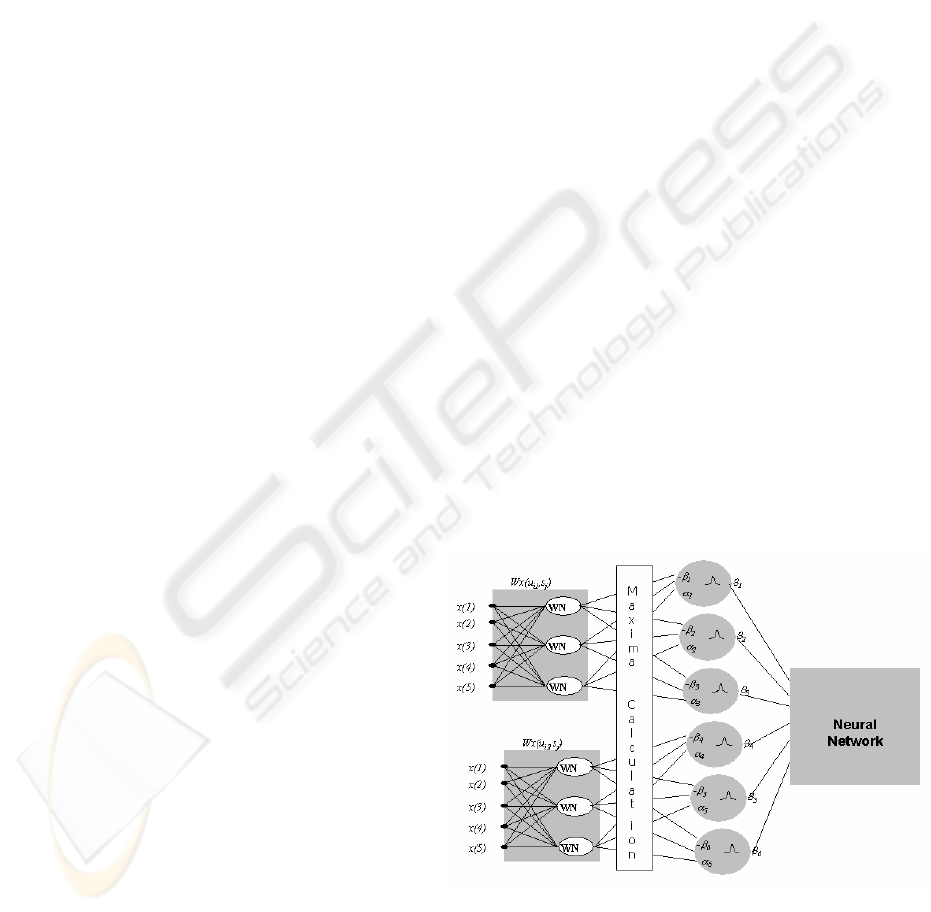
Figure 1: A Thresholding Wavelet Network constructed by six
thresholding nodes (three for each scale).
ICINCO 2004 - ROBOTICS AND AUTOMATION
222
that contrast the difference between signals of
different classes, while enhancing the commonality
between signals of the same class. But these
networks are temporal dependent and sensitive to the
time location of significant events in the input signal
such as the singularity points. This limits its
application in SEMG signals where the action
potentials are semi-randomly located (J Cram,
1998).
3 THRESHOLDING WAVELET
NETWORKS
The authors have introduced a new type of wavelet
network, the thresholding wavelet network (TWN)
(D Kumar, 2003). This is suitable for classifying
signals such as SEMG. The wavelet coefficients are
thresholded with an upper and lower bound. TWN
selects wavelet coefficients that identify a signal
based on magnitude for the relevant scales making it
is less sensitive to the time location of the
coefficients while more sensitive to signal features
(instantaneous frequency and singularity)
represented by the magnitude of wavelet
coefficients. An example of the network is shown in
Figure 1.
The TWN consist of four blocks of network
layer: a wavelet layer, maxima layer, thresholding
layer and neural networks layers (figure 1).
The input signal x(n) is applied to the wavelet layer,
the output is the magnitude of wavelet coefficients
|Wf(s,σ)|. The wavelet maxima layer selects wavelet
coefficients that are locally maxima.
The input to the thresholding layer is the wavelet
maxima at each scale of interest. The thresholding
levels (θ
l
,θ
h
) for one scale are the same. The scale-
dependent thresholding levels allow the network to
apply different thresholding levels to different
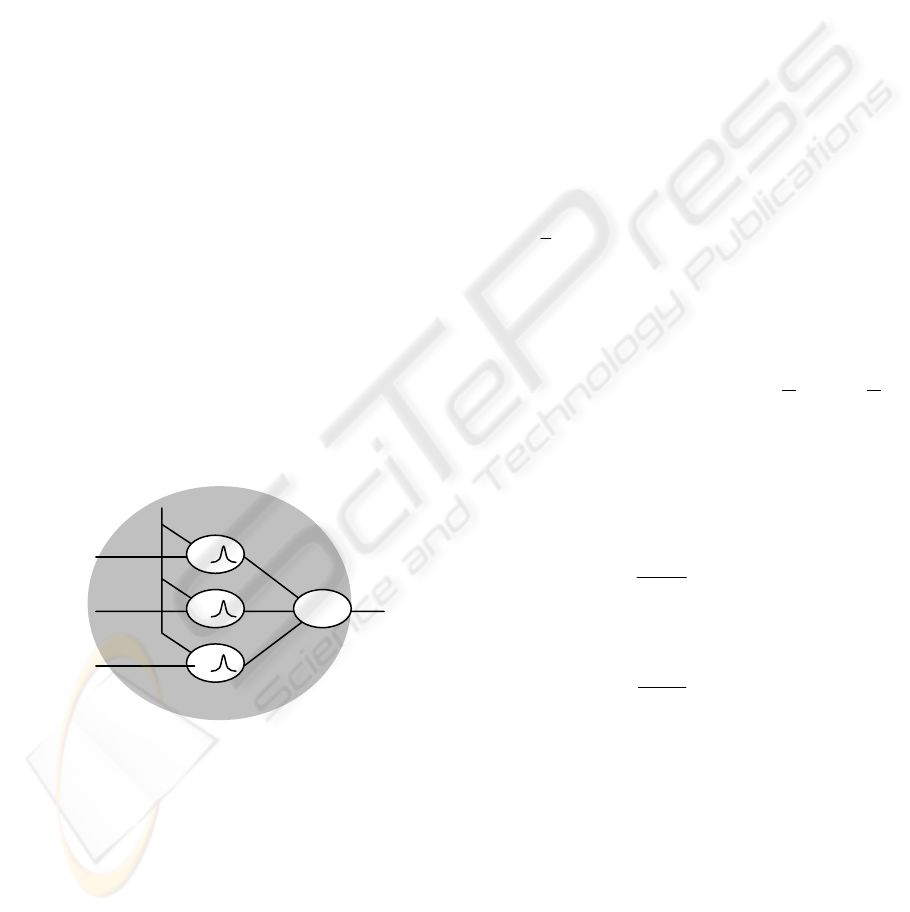
scales. The output of wavelet thresholding node ϕ is
the number of wavelet maxima with magnitude
between θ
l
and θ
h
.
The bias β determines the centre of g(x) while α
determines the width of the function. The
combination of α and β determines the upper and
lower thresholds. Figure 2 illustrates the
thresholding wavelet node.
The network is a supervised learning algorithm
based system. The parameters of this network (
α
,
β
and neural network weights and biases) are
initialised with random values. During the iterative
learning process, the values of these parameters are
changed to reduce the classification error using input
and target output examples. The cost function used
is the sum-squared error (SSE), the difference
between target output
ϕ
T
and the actual output
ϕ
.
2
2
1
)(
ϕϕ
−=
T
E (1)
In each thresholding node, the learning is the process
to locate the lower and upper threshold levels (
θ
l
and
θ
h
) of each node. Determining the optimum
value of the threshold parameters ensures number of
wavelet coefficients with magnitude
θ
l
<|Wf(s,
σ
)|<
θ
h
can best categorise the class of input signals.
The change of the parameters for each iteration
is determined using the gradient descent algorithm
(equations 9 and 10), and the learning rate
coefficient
ρ
.
old
oldnew
SSE
α
ραα
∂
∂
−=
(2)
old
oldnew
SSE
β
ρββ
∂
∂
−=
(3)
The learning process is repeated until the sum-
squared-error SSE falls below a predefined
maximum error E
T
. At this stage the network is
considered as able to classify the training pattern
with an error less than E
T
.
4 EXPERIMENTS
The aim of this study was to determine the possible
use of single channel SEMG from the forearm to
Wf(u
i,1
,s
i
)
α
i
α
i
α
i
-α
i
β
i
Σ
ϕ
i
Wf
(
u
i
,
2
,
s
i
)
Wf(u
i,3
,s
i
)
Σ
Σ
Σ
Figure 2: The Wavelet thresholding node.
ELECTROMYOGRAPHY BASED FINGER MOVEMENT IDENTIFICATION FOR HUMAN COMPUTER
INTERFACE
223

identify the various movements of the fingers.
Towards this aim, the TWN has been employed to
identify the hand gestures by classifying the SEMG
signal based on the difference in shape and
amplification of action potentials due to the
proximity of muscle fibers to the surface electrodes.
This problem has three levels of complexity; (i)
where all the fingers move together, (ii) where two
fingers move together and (iii) where each of the
finger are independent. As the first level of
complexity may be considered as trivial, two sets of
controlled experiments were conducted.
Single channel SEMG was recorded from the
flexor digitorum superficialis muscle using BIOPAC
System EMG100C at 2000 Hz sampling rate. The
SEMG recording system had HPF at 10 Hz, LPF at
1000 Hz and a notch filter at 50 Hz to eliminate
power-line interference and with gain of 2000. Three
male volunteers were tested on three separate
occasions.
The experiments were repeated and the
network was trained with 10 signals from each class.
The length of each signal for training purposes was
500 samples. TWN used had 500 nodes at its
wavelet layer, 498 nodes at maxima layer, 8 nodes at
its thresholding layer and 100 nodes at its hidden
layer. The TWN used Db2 wavelet at scale 1. The
experimental results are shown in Table 1.
The first experiment had two finger positions
classes. Class A signals were recorded when the
middle and ring fingers were flexed, while class B
signals were recorded when the index and little
fingers were flexed (Figure 3). These were selected
because the tendons of middle and ring fingers are
superficial compare to the tendons of index and little
fingers (J Cram, 1998, N Palastanga, 1994). The
muscle fibers of middle and ring fingers are more
superficial then the fibers of distal tendons. Thus the
shape and magnitude of recorded action potentials
when flexing the middle and ring fingers are
different to the action potentials when flexing the
index and little fingers. The results are presented in
Table 1.
The second set of experiments involved the
classification of SEMG signals for four different
fingers (flexion and extension). The finger positions
for the experiments are shown in Figure 4, 5 and 6,
while the experimental results are shown in Table 2,
3 and 4.
(a)
(b)
Figure 3: The finger positions for experiment 2.
a) The finger position when class A signals were
being recorded. b) The finger position when class
B signals were being recorded.
(a)
(b)
(c)
(d)
Figure 6: The finger positions for experiment 5.
(a)
(b)
(c)
(d)
Figure 4: Finger positions for experiment 3.
(a)
(b)
(c)
(d)
Figure 5: The finger positions for experiment 4.
ICINCO 2004 - ROBOTICS AND AUTOMATION
224

Table 1:
Table 2: The Classification Error of Experiment 3
Class A Class B Class C Class D Average
Subject 1 10.0% 6.67% 20.0% 6.67% 10.83%
Subject 2 13.33% 30.0% 13.33% 0% 14.16%
Subject 3 16.67% 26.67% 33.33% 0% 19.16%
Average 13.33% 21.11% 22.22% 2.22% 14.72%
Table 3: The Classification Error of Experiment 4
Class A Class B Class C Class D Average
Subject 1 0% 6.67% 6.67% 46.67% 15.0%
Subject 2 0% 6.67% 40.0% 6.67% 13.33%
Subject 3 40.0% 13.33% 0% 0% 13.33%
Average 13.33% 8.89% 15.56% 17.78% 13.89%
Table 4: The Classification Error of Experiment 5
5 RESULTS AND DISCUSSION
The results of the experiments are tabulated in tables
1 to table 4. From these tables it is observed that
single channel SEMG when classified using the
magnitude of the wavelet coefficients gives high
level of accuracy, ranging from 93% to 85%.
From the results it is also observed that the
classification performance using the TWN decreases
as the complexity increases (number of classes
increases). The error for the classification of two
classes of signal was 7 %, while the error for the
classification of four classes ranged between 12%
and 14%.
The experiments confirmed the effectiveness of
using wavelet transform in feature extraction stage
of the classification process. The TWN could extract
wavelet’s time-scale features of input signal and
adaptively select the proper features necessary for
the classification through wavelet thresholding
mechanism. The thresholding mechanism eliminates
the need for manual feature selection process. The
network initialisation did not require the priori
knowledge of the signal to be considered.
The experiments also demonstrated the efficacy
of TWN to classify SEMG signals recorded during
low-level, steady state contractions. All the SEMG
signals used in the experiments were recorded when
the fingers were bended with a minimal needed
contraction. This advantage enables the TWN to be
applied in SEMG classification of natural finger
movement where the contraction level is minimal.
Also this classification technique can be applied in
the system that responds to steady state contraction
rather than the transient of contraction as in Hudgins
network (Hudgins, 1993).
6 CONCLUSION
This paper presents a new technique where single
channel SEMG from the flexor digitorum
superficialis muscle is used to accurately determine
the movement (flexion and extension) of the
individual fingers. The authors have used a wavelet
network that has been developed by them (D Kumar,
2003). The network classifies SEMG signals by
extracting time-scale features with wavelet
transform, and adaptively adjusts its thresholding
level during its learning process to select wavelet
maxima with certain magnitude that characterised
the input signals.
The experimental results of the SEMG
classification using TWN are extremely promising.
From the results, it is observed that:
a) This technique provides high accuracy of
classification, accuracy ranging from 93% to
85%.
b) The accuracy of increases as the number of
signal class decreases.
c) The TWN can be applied to classify low
contraction level SEMG signals. This advantage
allows the network to be applied in SEMG-
based finger posture classifier and may find
applications for other tonic muscle contractions
such as muscles of the back.
d) The TWN is less sensitive to the window size.
REFERENCES
Cram, J.R., G.S. Kasman, and J. Holtz, (1998),
Introduction to Surface Electromyography.
Gaithersburg, Maryland: Aspen Publishers, Inc.
Class A Class B Average
Subject 1 16.67% 0% 8.33%
Subject 2 0% 10.0% 5.0%
Subject 3 16.67% 3.33% 10.0%
Average 11.11% 4.44% 7.78%
Class A Class B Class C Class D Average
Subject 1 0% 13.33% 0% 0% 3.33%
Subject 2 33.33% 6.67% 20.0% 13.33% 18.33%
Subject 3 0% 20.0% 33.33% 13.33% 16.67%
Average 11.11% 13.33% 17.78% 8.89% 12.78%
ELECTROMYOGRAPHY BASED FINGER MOVEMENT IDENTIFICATION FOR HUMAN COMPUTER
INTERFACE
225

Chan, F.H.Y., et al., (2000) Fuzzy EMG Classification for
Prosthesis Control. IEEE Transaction on
Rehabilitation Engineering. 8(3): p. 305-311.
Englehart, K., et al., (1999) Classification of the
Myoelectric Signal using Time-Frequency based
Representation. Medical Engineering and Physics. 21:
p. 431-438.
Englehart, K., B. Hudgins, and P.A. Parker, (2001) A
Wavelet-Based Continuous Classification Scheme for
Multifunction Myoelectric Control. IEEE Transaction
on Biomedical Engineering,. 48(3): p. 302-311.
Hagan, M.T., H.B. Demuth, and M. Beale, (1996) Neural
Network Design., Boston: PWS Publishing Company
Hudgins, B., P. Parker, and R.N. Scott, (1993) A New
Strategy for Multifunction Myoelectric Control. IEEE
Transaction on Biomedical Engineering,. 40(1): p. 82-
94.
Graupe, D. and W.K. Cline, (1975) Functional Separation
of SEMG Signals via ARMA Identification Methods for
Prosthesis Control Purposes. IEEE Transaction on
Systems, Man, and Cybernetics. SMC-5 (2): p. 252-
259.
Kumar D, Pah N D; (2003) Thresholding Wavelet
Networks for Signal Classification: International
Journal of Wavelets, Multiresolution and Information
Processing (IJWMIP) (No: 02-10-25, 2003).
Kumar D, Pah N D; (2003) Wavelet Analysis of Surface
Electromyography to Determine Muscle Fatigue:
IEEE Transactions on Neural Systems and
Rehabilitation Engineering, pp 400- 406.
Mallat, S., (1999) A Wavelet Tour of Signal Processing.,
London: Academic Press.
Palastanga, N., D. Field, and R. Soames, (1994)
Anatomy and Human Movement., Oxford:
Butterworth-Heinemann Ltd
Szu, H.H., B. Telfer, and S. Kadambe, (1992) Neural
Network Adaptive Wavelets for Signal Representation
and Classification. Optical Engineering,. 31(9): p.
2907-1916.
ICINCO 2004 - ROBOTICS AND AUTOMATION
226
