
Distributed Control Lab
Andreas Rasche, Bernhard Rabe, Peter Tr
¨
oger, and Andreas Polze
Hasso-Plattner-Institute, University of Potsdam, P.O. Box 900460,
14440 Potsdam, Germany,
Abstract. The Distributed Control Lab (DCL)[10] provides an open infrastruc-
ture for conducting robotics and control experiments from the Internet. It is based
on web service technologies and offers a wide range of frontend applications.
Within the DCL environment we focus on safety mechanisms in order to prevent
malicious code from damaging experimental equipment. This includes source
code analysis, runtime observation and the dynamic replacement of faulty con-
trol algorithms.
Within the paper we present an overview of our architecture and explain the im-
plemented frontends in detail. We introduce the installed experiments and report
our experiences from operation in the last years. In addition we will describe our
latest integration of grid computing technologies, which allows the outsourcing
of computing-intensive simulation tasks.
1 Introduction
The ’Distributed Control Lab’ developed at the Operating Systems and Middleware
Chair at Hasso-Plattner-Institute at University of Potsdam realizes a remotely controlled
testbed for interconnected middleware-based components and embedded mobile sys-
tems.
The job-based environment of our Distributed Control Lab allows the user to con-
duct experiments from a variety of client devices. In the context of this paper we use
the term experiment to denote its physical installation and its specific control software.
Our management architecture includes user authentification, experiment manage-
ment, result management and the management and queuing of jobs. After a successful
authentification at the DCL, the user can submit code to a chosen experiment. After-
wards he can analyze execution results, when the experiment execution has finished.
The implemented architecture allows the management of multiple users accessing a va-
riety of experiments, while all users and experiments can be distributed among different
locations. Figure 1 shows a general overview of the lab architecture. A variety of exper-
iments have already been integrated, including the control of Lego Mindstorm robots,
a Foucault’s Pendulum and the Higher Striker. Furthermore a number of different user
interfaces have been implemented. There is a ASP.NET web frontend, a command line
interface, a Windows CE mobile client and access to the DCL has also been integrated
into the Visual Studio .NET development environment. Publishing experiments over the
Rasche A., Rabe B., Tröger P. and Polze A. (2004).
Distributed Control Lab.
In Proceedings of the First International Workshop on e-Learning and Virtual and Remote Laboratories, pages 150-159
DOI: 10.5220/0001149501500159
Copyright
c
SciTePress
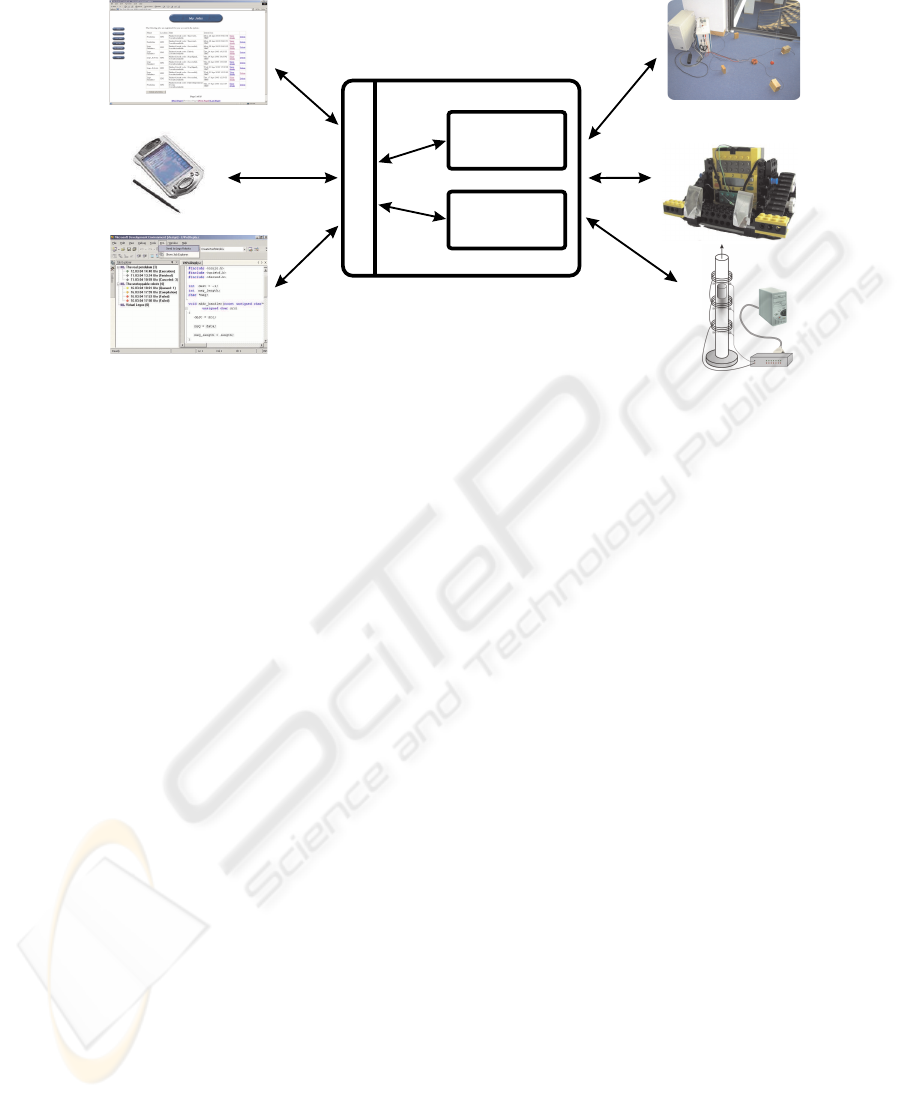
Visual Studio Add-In
Windows CE Client
Web Frontend
S
O
A
P
Experiment Service
Result
Management
Experiment
Management
Lego Robots
High Striker
Realtime and
Windows CE
Foucault's
Pendulum
Fig. 1. Distributed Control Lab Overview
Internet bears the risk that malicious code from unknown sources can possibly damage
physical experiment equipment. Within the DCL, we investigate and implement tech-
niques that prevent malicious code from damaging the experiments. We use source code
analysis to detect malicious code. Because not all potential errors can be found, we have
also introduced special languages that forbid usage of pointers and recursion, which can
easily be used to attack our experiments. In the Foucault Pendulum experiment we use
analytic redundancy - user control component are observed during runtime. In case of
abnormal behavior, it can be replaced by a verified safety controller using dynamic
reconfiguration. Details about this experiments can be found in [12, 13].
Another problem with publicly available experiments is the unpredictable number
of users accessing a single experiment or even the overall framework. The usual solution
for this scalability issue is the simulation of experiment code execution. Users can test
their code before submitting it to physical experiment. This leads to an increased need
for computing resources. In a consequence the response time of the lab is influenced by
heavy usage. Therefore we use grid technologies to compensate these issues by utilizing
computing power from grid resources.
The remainder of the paper is structured as follows: The subsequent Section 2 de-
scribes the management architecture of our DCL including an overview of implemented
DCL frontends. Section 3 briefly outlines experiments installed in the Lab. Section 4
presents our simulation infrastructure for the Lab experiments, including details about
the usage of grid services. Related work is provided in Section 5. The final Section
concludes the paper and discusses future work.
149
2 The Distributed Control Lab Architecture
The architecture of our DCL consists of a frontend interface for different types of end
user applications and the framework management backend part.
The DCL offers Web Services-based (SOAP) interfaces to allow several types of
user interface applications to connect regardless of their hardware and software archi-
tecture. The existing frontends for the DCL will be discussed in section 2.1 in detail.
At the Web Services interface, requests for experiment usage are abstracted as jobs.
The internal representation of a job object contains the requested experiment type, a ref-
erence to user details and the code to be executed. Our framework ensures the serial ex-
ecution of jobs on managed experiments. Results of experiment runs are post-processed
and stored in the framework.
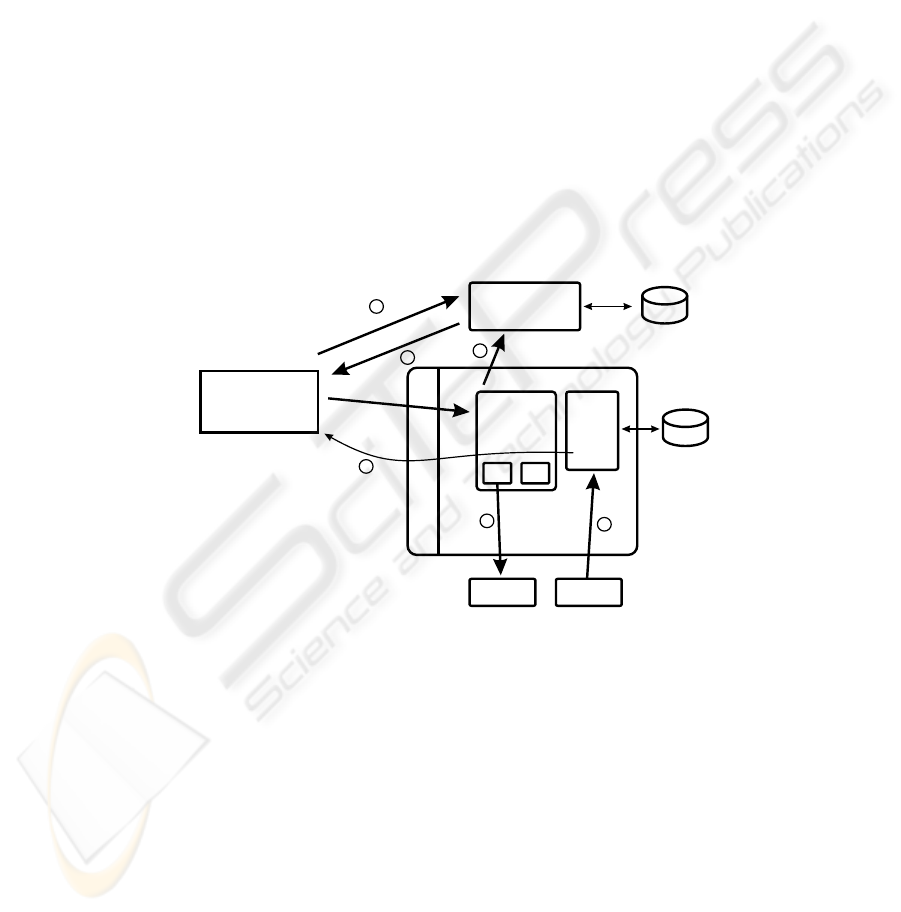
The DCL backend consists of three main parts. Authentication of users is realized
in a separate component - the ticket server. The second component - the experiment
manager - queues requests for experiment usage from users and manages instances of
experiments. A result manager keeps track of execution state of jobs and stores results
of experiment runs. The central components of the DCL have been implemented on the
Microsoft .NET platform. Figure 2 illustrates central parts of the DCL architecture, in-
Ticket
Service
User
Interface
S
O
A
P
1
2
A
u
t
h
e
n
t
i
c
a
t
e
T
i
c
k
e
t
s
T
i
c
k
e
t
+
C
o
d
e
5
Queue
Experiment
Manager
Experiment Experiment
E
x
e
c
ut
e
Check Ticket
4
Result
Manager
S
t
o
r
e
R
e
s
ul
t
6
V
i
e
w
R
e
s
u
l
t
7
Experiment Service
Fig. 2. Message Flow in DCL
cluding timely ordered message flow. Behind the SOAP interface, the main components
of the DCL perform their communication with .NET Remoting mechanisms. Experi-
ments are attached to the management system by registration, using a .NET Remoting
interface.
The Ticket Server component is responsible for relating executed jobs with a phys-
ical end user. All jobs in the DCL system are represented by unique tickets. All other
parts of the DCL architecture (Experiment Controller, Experiment Manager, Result
Manager) use those tickets. Tickets can be acquired from the Ticket Server, which
checks user data against a Windows 2000 Active Directory [8].
150

A user can select an experiment and send a valid ticket and the code to be executed to
the Experiment Manager. If a free experiment instance of the selected type is available,
the code will be transferred to an Experiment Controller instance, where it will be com-
piled and installed on the physical experiment. Within the Experiment Controller, user
code is checked and observed during runtime and in case malicious code is detected, it
will be removed. After experiment execution has finished, results are transferred to the
Result Manager. Experiment results can be acquired via the SOAP interface. Some of
our implemented user interfaces are able to visualize this data as diagrams or display
video streams recorded during experiment execution.
2.1 Frontends for the DCL
The open architecture of the DCL, based on the widely adopted Web Services using
the SOAP standard, facilitates several types of client applications. Since the start of the
DCL in 2002 various types of frontends were developed, offering different subsets of
functionality. At the moment there are 4 frontends (see figure 1): a ASP.NET Website,
a command line based client, a Windows CE client and a Visual Studio .NET Add-
In. The following Sections will present the important features and requirements of the
implemented frontends.
ASP.NET Web Interface The first and our primary frontend is realized as ASP.NET
interface. ASP.NET is the web application environment of the Microsoft .NET platform.
Because of its seamless integration of web services technology it can act as powerful
client for the DCL architecture. The actual version contains the following features:
– Overview and detailed information for all experiment types
– Live video stream from the experiment area for immediate user feedback
– Support of incremental code development
– State information of all jobs, including currently running and queued onces
– Job management (cancel, delete, or start jobs)
– Result presentation in several ways regarding to the experiment type (raw data, state
diagrams, Flash movie, animated video, detailed error description, compile errors)
Command Line Client The command line client frontend is mainly used for perfor-
mance and load tests of the DCL framework. It can work in an interactive mode with
a step-by-step flow and in a silent mode without user interaction. Results and errors
are only available as text messages. With the set of call parameters and the silent mode
complex batch processes are possible including multiple execution of jobs on a selected
experiment.
Windows CE Client The the full featured ASP.NET web interface is optimized for
desktop computers and could not be displayed by today’s Pocket PCs with it’s restricted
capabilities. Therefore, as part of a students’ project, we have implemented a limited
feature set for a Pocked PC running at least Microsoft Windows CE 3.0. The mobile
frontend was implemented according to the devices’ screen size, missing keyboard
support and networking bandwidth. Entering program code is simplified by pointing
selectable code fragment templates.
151

Visual Studio Add-In In the presence of errors in the source code of a job, it is difficult
to manage debug parameter with the introduced DCL clients. The integration of the
DCL functionality in the Microsoft Visual Studio .NET 2003 IDE is the latest frontend
that also originated as students’ project. The important features in comparison with the
web interface are:
– A experiment specific structural list of jobs in a tool window
– Display of source code errors in the code editor
– Direct selection of available results
– Familiar environment for developer
The Add-In allows developing experiment programs in a IDE manner, because the well
known Visual Studio work flow was kept. After writing the program code the target
experiment will be selected (e.g real robot or simulation) and possible errors will be
listed in the task list of the Visual Studio. This Add-In combines the functionality of the
DCL and the powerful tool chain of the Visual Studio .NET.
3 DCL Experiments
3.1 Lego Mindstorm Robots
One year ago the control of Lego Mindstorm Robots has been integrated into the Dis-
tributed Control Lab. The lab user can write C-style programs in order to conduct robot
control experiments within a pre-defined operation area. After each experiment run, the
robot has to be driven to its charging dock. The operation area is observed by a cam-
era. An image tracking software provides position information of the robot. A safety
controller, installed on the robot, is able to find the robot’s home and to dock onto the
charging ramp. The safety controller is activated as well, if a faulty user control algo-
rithm tries to leave the operation area, or experiment hardware could be damaged.
We have learned from this experiment, that stable environmental conditions must
be established. Changing light conditions influence tracking quality and operation area
ground properties change results of the control experiments. We have installed the robot
experiment in a basement room with constant light conditions, which has no windows.
We also use a special control language that prevents malicious code constructs,
which could damage the hard- and software. This language forbids the usage of pointers
and recursions. In addition only calls to pre-defined functions are permitted.
A simulator for this experiment has been developed as well. The robot simulator is
able to execute programs together for the real experiment and produces a trajectory of
the robots way, which can be visualized by some of the DCL frontends.
3.2 Foucault’s Pendulum
This experiment consists of a pendulum with an iron ball swinging over an electro-
magnet. Two orthogonal light barriers provide information about the balls position. The
goal of the experiment is to switch the magnet on or off at the correct moment in time in
order to keep the pendulum swinging. Users can practice to find algorithms, optimized
152

for minimum energy consumption or acceleration to a maximum amplitude within a
given time.
In order to control the pendulum, a user can write C# programs, which are executed
by a commercial-off-the-shelf X86 PC running the Windows 2000 operating system.
Because of real-time constraints of the experiment hardware, which samples the light
barriers with a frequency of 23,4 kHz, a custom hardware buffers sampled data, which
can be transferred into the PC via the Universal Serial Bus interface. A device driver
transforms the experiment data into a queue-based structure and is able to generate
events for a user control program. The user program itself can switch the magnet by
sending events to the device driver.
3.3 Higher Striker Experiment
The Higher Striker is a hard real-time control experiment. In this experiment a user
can write control programs, that accelerate an iron cylinder in a tube of glass, using six
electro magnets, which have been placed along the tube. Seven light barriers between
the magnets provide position information of the cylinder.
The experiment consists of a custom control hardware connected via the parallel
port interface to a control computer, and the physical installation, with electro magnets,
light barriers and the described tube. Data from the light barriers and to the electro
magnets are sampled with a frequency of 38,4 kHz. A special hardware ensures that the
electro magnets can not be activated more than 500 ms to avoid heat problems.
Data from the light barriers and to the magnets can be buffered before they are read
or write via the parallel port. The user control program can define how much of the 256
byte buffer should be used. The smaller the buffer size, the faster a control program
has to read or write the data. Smaller buffers guarantee faster reaction times onto light
barrier events, but demand stricter timing constraints of the control program.
Because of the high speed, the cylinder can reach, a real-time operating system
must be installed at the controlling PC. We have already used Windows CE.NET 4.2
[9] and RT-Linux [2] as basis of our control programs. A DCL user can write a Windows
CE.NET console application and access the experiment via a low level API, that sup-
ports the configuration of the buffer size, and provide an atomic read/write operation,
which is needed in order to keep light barrier and magnet data synchronous.
This experiment can be used to practice writing effective control algorithms, be-
cause physics behind the movement of the cylinder is quite complex. We are using the
Higher Striker experiment in our lectures of embedded system development.
4 Simulation Infrastructure
The following Section explains our extension of the DCL architecture, in order to allow
the utilization of grid computing technologies for computing intensive simulation tasks.
4.1 DCL Usage Scenarios
Due to the fact that a possibly high number of client machines may try to work with
a fixed set of experiments, we refer to this scenario as many-to-one model. We extend
153

this model within the DCL to a many-to-many scenario by using grid computing tech-
nologies for simulation purposes. This extension was motivated by the daily operation
in the last years. In general we have experienced three practical usage scenarios for our
virtual lab:
few jobs on all experiments : Most of the time our virtual lab operates at normal load,
serving only a small number of users, which work on all kinds of experiments. In
this situation the underlying hardware (computers, experimental hardware) works
in normal operation mode. All jobs are executed directly after their submission.
many jobs on one experiment : This situation occurs in case when a new experiment
is introduced to a group of people, for example in the context of a lecture tuto-
rial. The subsequent submission of many jobs by different users leads sometimes
to unsatisfying timeouts for particular users. Another reason for high load on ex-
periments is the development of a new algorithm, for example to drive a robot back
to its battery-charging base station. In this situation, only one user submits a lot of
different jobs in short intervals to a particular experiment. For several experiment
types with a long reset time this leads to annoying delays between experiment runs.
many jobs on all experiments : Sometimes the DCL has a high overall load, typically
because of a preceding demonstration to a larger audience. After such demonstra-
tions many parallel users try to submit jobs to all kinds of experiments. This leads
to a maximum workload on the software framework as well as on the experiments.
Users have to wait an unsatisfying long time before they can submit their code to
an experiment.
To provide a solution for these restrictions, the DCL relies (like many other virtual lab
infrastructures) on the simulation of experiments. Simulation can reduce the impact
of many parallel users and increases the responsiveness of the overall framework. The
simulation can basically substitute the functionality of the experiment, which increases
the availability for the overall experiment type. The availability of the physical coun-
terpart can be influenced by several factors: Some of the experiments could have a long
initiation phase (robots), others may need a long execution time in general (pendulum).
There are also experiments that need periodic breaks during their usage, for example
to recharge batteries (robots) or to cool down hardware parts (higher striker). However,
the simulation relies mainly on available computing capacity.
A primary constraint for the usefulness of such a simulation is execution time. If the
overall execution time of a simulation run exceeds the time on the physical experiment,
the simulation gives the user no benefit. Therefore it must be always ensured that the
simulation can be executed fast enough. For most institutions in this situation it is not
worthwhile to spend a lot money for better simulation machines, since this large com-
puting capacity is only needed several times during high-load phases. The availability
of a virtual lab in the Internet makes this kind of load peaks even more unpredictable.
4.2 Grid Computing Backend
There exist several approaches in the grid computing research field to cope with the
demand-driven access to computing resources. On of the primary aims in this area is
the transparent offering of resources over platform-independent interfaces [5].
154

For the purposes of our simulation tasks we consider current computational grid
technologies. They allow us an on-demand outsourcing of computing-intensive DCL
tasks. The current DCL installation uses the HPI grid testbed as background resource,
which consists of nearly 50 machines in a Condor [6] cluster, several Itanium SMP ma-
chines and some other heterogeneous systems (Sun, MacOS X, Windows). We made
a clear decision not to use proprietary interfaces, we rely on the Distributed Resource
Management Application API (DRMAA)[11], a standard job submission interface de-
fined by a working group at Global Grid Forum (GGF). Additionally we make use of
Globus [4], an open source toolkit for building grid infrastructures. Since the job sub-
mission interface of Globus does not rely on standards defined by the GGF, we decided
to utilize only resource information interfaces from Globus for our DCL framework.
4.3 Simulation in the Grid
If we assume the availability of multiple machines in the virtual lab grid-backend, two
usage scenarios can be identified: using idle machines for self-contained tasks, or using
idle machines to compute a distributed algorithm.
The first case applies to simulations where the simulated time can be faster than the
real time, for example in the Lego robot experiment. We developed a .NET application
that takes a user-written program as input and simulates the robot’s driving, including
the boundaries of the area. This simulation can be executed at the highest possible
speed, since no dependencies to real world parameters must be considered. We try to
integrate all relevant parameters (like battery charging status or ground quality) into
the simulation in order to provide meaningful results for the user. The grid-backend of
the DCL takes such a simulation job request, and finds an appropriate free machine for
execution. After finishing, the resulting data (e.g. driving route) is transfered back to the
DCL server. The grid-backend can assign multiple machines for a parallel execution of
different simulation tasks. This could become the case within an overload situation on
the overall framework.
The second possibility for grid usage is the distributed execution of an application.
We currently use a rendering program for the visualisation of simulation results in the
higher striker experiment. The simulator itself runs on the same hardware and operating
system as the real controller machine (Windows CE, X86). In case of a simulation
run, the control commands for the physical hardware are exchanged with a call to our
simulated higher striker hardware. The main reason for this differing architecture are
the strict timing constraints in the experiment - it is not possible to ignore influences
from operating system and hardware behavior. Therefore it is not possible to build an
adequate self-contained simulation. In practical usage this is not a big problem, since
the code execution in the entire experiment takes only several seconds.
From the given reasons we decided to use the grid resources in an alternative way
here. Our framework uses the output from the simulator in order to render a 3D visual-
isation of an higher-striker experiment run. We use the popular Povray [1] package for
the rendering tasks. The binary is executed in a distributed manner over the available
grid resources, simply by segmenting the rendering tasks for the resulting movie.
We experienced in practical exercises that non-technical users, for example high-
school students, are very pleased if the user interface depicts the results. Additionally
155

it is possible to augment the resulting video with additional information, for example
power relationships between attraction and rejection of the metal cylinder in the higher-
striker experiment.
Both simulation experiments use the grid resources in a similar manner. The Povray
rendering tasks as well as the Lego simulation activity are initiated by the experiment
controller for a particular user job. The experiment controller uses the DRMAA inter-
face for submitting a grid job, which consists of the binary to be executed and the input
parameters. The execution is coordinated by the implementation. It checks the number
of available cluster nodes before starting the grid job submission. After finishing, all
nodes return their result values to the DCL server, which itself stores them as standard
experiment results. The grid infrastructure is responsible for the complete execution of
the job and the reliable transfer of input and output files.
5 Related Work
Web-based eLearning and online laboratories became more and more focus of research
in the last couple of years. There are several real world examples available. Most of
them concentrate on the provision of experiments with expensive control hardware.
The VVL (german: Verbund Virtuelles Labor) project at University Reutlingen /
Germany [15] focuses on an eLearning environment in the context of automation sys-
tems. They offer experimentation with CAN bus installations, industrial robots and
Java-based control logic simulations. The project is primarily intended for automation
engineering students and for computer science students.
The Virtual Lab at University of Hagen [14] offers educational experiments in con-
trol engineering.The project is a cooperation over three german universities (Bochum,
Dortmund, Hagen). At the moment there are several robot based experiments. One of
their primary goals is to avoid costly transportation of teaching equipment to the partic-
ipating universities.
Another example is the iLab project (WebLab) at MIT [7] in cooperation with Mi-
crosoft Research allows remote experiments with microelectronic devices to be carried
out. The main purpose is the measurement of the characteristics of those devices. It is
possible to access the full programming capabilities of the semiconductor measuring
units, voltage measuring units, or voltage source units.
At University of Pisa the Tele-Laboratory [3] offers a graphical user interface for
robotic experiments. The user accesses the system through a downloadable Java-applet.
This applet offers a graphical multi target robot language with a basic instruction set.
It acts as an intuitive programming interface for easy access from undergraduate and
high-schools.
In general there are a lot of web-based remote lab solutions available. In contrast to
most of this work, which focuses on particular experiment hardware, our work at DCL
addresses software engineering aspects of interconnecting middleware and embedded
devices as well.
156

6 Conclusions and Future Work
Within the paper we have presented the architecture of our remote laboratory and intro-
duced available experiments. We have made good experience with the daily operation
in teaching and research, regarding availability and safety of our infrastructure. We
make use of source code analysis, runtime observation and dynamic reconfiguration to
prevent malicious code from disturbing the integrity of our lab.
We have explained the usability of simulation techniques to cope with high-load
situations. We utilize grid computing technologies for out-sourcing computing inten-
sive tasks. Currently we have already used this approach within two experiments: the
simulation of robot movement and the graphical rendering of simulation result.
In the future we plan to extented our lab with new experiments, as well as new front-
end applications. We are going to integrated experiment from geographically distributed
locations. In addition we will apply latest web service standards, such as WS-Security,
to improve the interoperability of our frontend interfaces.
References
1. Persistence of vision raytracer. http://www.povray.org, 2004.
2. Michael Barabanov. A linux-based realtime operating system. Master’s thesis, New Mexico
Institute of Mining and Technology, 1997.
3. A. Bicchi, A. Coppelli, F. Quarto, L. Rizzo, F. Turchi, and A. Balestrino. Breaking the lab’s
walls: Tele-laboratories at the university of pisa. In Proc. IEEE Int. Conf. on Robotics and
Automation, pages 1903–1908, Seoul, Korea, 2001.
4. I. Foster and C. Kesselman. Globus: A Metacomputing Infrastructure Toolkit. The In-
ternational Journal of Supercomputer Applications and High Performance Computing,
11(2):115–128, Summer 1997.
5. Ian Foster. The anatomy of the Grid: Enabling scalable virtual organizations. Lecture Notes
in Computer Science, 2150, 2001.
6. M.J. Litzkow, M. Livny, and M.W. Mutka. Condor - A Hunter of Idle Workstations. In Pro-
ceedings of the Eighth International Conference on Distributed Computing Systems, pages
104–111, 1988.
7. Microelectronics WebLab at MIT. http://www-mtl.mit.edu/ alamo/weblab/index.html. 2003.
8. Microsoft. Microsoft Active Directory. http://www.microsoft.com/ad, 2003.
9. Microsoft. Windows CE.NET 4.2. http://msdn.microsoft.com/embedded, 2004.
10. OSM Group. The Distributed Control Lab. http://www.dcl.hpi.uni-potsdam.de, 2004.
11. Hrabri Rajic, Roger Brobst, Waiman Chan, Fritz Ferstl, Jeff Gardiner, Andreas Haas, Bill
Nitzberg, and John Tollefsrud. Distributed Resource Management Application API Specifi-
cation 1.0. http://forge.ggf.org/projects/drmaa-wg/, 2004.
12. Andreas Rasche and Andreas Polze. Configuration and Dynamic Reconfiguration of
Component-based Applications with Microsoft .NET. In International Symposium on
Object-oriented Real-time distributed Computing (ISORC), pages 164–171, Hakodate,
Japan, May 2003.
13. Andreas Rasche, Peter Tr
¨
oger, Michael Dirska, and Andreas Polze. Foucault’s Pendulum
in the Distributed Control Lab. In Procceedings of IEEE Workshop on Object-Oriented
Realtime Dependable Systems, pages 299–306, Capri Island, Italy, October 2003.
14. Real Systems in the Virtual Lab. http://prt.fernuni-hagen.de/virtlab/info
e.html. 2003.
15. Verbund Virtuelles Labor - Automation Systems and Computer Science. http://robo16.fh-
reutlingen.de/english/index.html. 2003.
157
