
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
Peter Sapaty
1
Masanori Sugisaka
2
1
Institute of Mathematical Machines and Systems
National Academy of Sciences,
Glushkova Ave 42, 03187 Kiev, Ukraine
2
Department of Electrical and Electronic Engineering
Oita University, 700 Oaza Dannoharu, 870-1192 Japan
Keywords: parallel and distributed processing, distributed control, space navigation, spati
al pattern-matching, WAVE-
WP language, system integrity, system management, distributed simulation, cooperative robotics, open
systems.
Abstract. A new computational and control model of parallel and distributed nature has been developed. It comprises
self-evolving, space-conquering automaton, high-level system navigation and coordination language,
describing system problems in a spatial pattern-matching mode, and related distributed control mechanisms
for management of physical, virtual, and combined worlds. The model allows us to obtain complex spatial
solutions in a compact, integral, and seamless way. It can be effectively used for the creation, integration,
simulation, processing, management and control of a variety of dynamic and open systems – from physical
to biological, and from artificial to natural.
1 INTRODUCTION
The use of computers is steadily shifting from
computations to coordination and management of
complex distributed and dynamic systems, in both
civil and military areas. To speed up the progress in
this direction, we need qualitatively different
knowledge processing and control models as
traditional ones, like Turing machine or cellular
automata, underlying conventional computers and
programming in them, were originally oriented on
computations. We also need models that can
describe much broader activities than traditional
information processing, to operate in real worlds,
with physical movement and physical matter and
objects relocation and manipulation.
The execution of such models may need to
i
nv
olve any existing manned or unmanned hardware
and software systems in the world, human beings
including. A possible general-purpose model of this
type, called WAVE-WP (or World Processing), as a
further development of the distributed network
processing WAVE paradigm (Sapaty, 1999), will be
summarized in this paper.
2 PROBLEMS OF DISTRIBUTED
PROCESSING AND CONTROL
TECHNOLOGIES
Single machine solutions are often showing highest
possible integrity as a system – with all resources
directly available, and control being global, direct,
and absolute. On the contrary, the existing
distributed computing and control models and
technologies follow the analytical approach,
representing and studying systems as consisting
from pieces, or agents, exchanging messages or
sharing common (distributed) objects. This results in
known difficulties of obtaining the needed global
behavior from local activities, especially if there
many of them and their number and interactions
change over time.
92
Sapaty P. and Sugisaka M. (2004).
WAVE-WP (WORLD PROCESSING) TECHNOLOGY.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 92-102
DOI: 10.5220/0001152400920102
Copyright
c
SciTePress
Overhead in making large distributed systems
operate as a single controllable entity and follow
global goals, by using such approaches, may be
enormous, as symbolically shown in Fig. 1, see also
(Sapaty, 2002), and the necessity of runtime
recovery after failures may aggravate the situation
further.
1
2
3
4
5
Integral
single-
machine
solution
Breaking
into pieces
to be
distributed
5
4
2
3
1
communication &
synchronization
control
Distributed
solution
Figure 1: Overhead of distributed system solutions.
For solving complex problems in real, especially
unpredictable and hostile environments, we may
need distributed systems of much higher integrity,
being based on quite different (than traditional
pieces-to-whole) ideologies and methodologies.
The WAVE-WP model tries to attack the
problem by starting from the opposite side – from
the whole, allowing us to express it directly, while
abstracting from possible system’s parts and their
interactions, delegating the latter to an efficient
automatic implementation.
3 THE WAVE-WP CONTROL
AUTOMATON
The automaton effectively inherits the integrity of
traditional sequential programming over localized
memory, but for working now with the real
distributed world, while allowing its parallel
navigation in an active pattern flow and matching
mode – as a single spatial process.
The automaton may start from any point of the
distributed world or system to be controlled,
dynamically covering its parts or the whole, and
mounting of a variety of parallel and distributed
knowledge and control infrastructures. Implanting
distributed “soul” into the system organization, the
automaton increases the system's integrity,
capability of pursuing local and global goals,
assessing distributed situations, making autonomous
decisions, and recovering from indiscriminate
damages.
In quite other applications, it may need to
destroy the very system it propagates through and/or
operates in (or certain, for example, malicious
incursions or infrastructures in it). Many spatially
cooperating or competing parallel WAVE-WP
automata may evolve on the same system's body
serving, say, as deliberative, reactive, and/or
reflective spatial processes.
World representation. One of the main
features of WAVE-WP is the representation of
distributed worlds it operates in, as described in
(Sapaty, 2000).
Physical world (or PW) is continuous and
infinite in WAVE-WP. Existing at any its point, and
possibly performing a job, is considered as residing
in a node (with physical coordinates). Such a node,
reflecting only occupancy at the point, has no
personal identity or content. It vanishes with the
termination of all occupancies in it.
Virtual world (or VW) is discrete and interlinked
in WAVE-WP, and is represented, similar to WAVE
(Sapaty, 1999), by a distributed Knowledge Network
(KN). Its persistent nodes may contain established
concepts or facts, and (also persistent) links
(oriented and non-oriented, connecting the nodes)
may reflect different relations between the nodes.
The same model can also operate with the united
(or PVW) world, in which any element may have
features of the both worlds. A simplified example of
such a world is shown in Fig. 2.
node1
link1
node6
node3
Node4
node2
link8
link9
link3
link7
link5
link4
x12.5 y4
x13.5 y9
x10.8 y3
x7.5 y4.5
x3.5 y9
x2.8 y4.5
x10.5 y9.7
x5 y6.8
link4
link4
Persistent virtual nodes
Physical-
Virtual
nodes
Temporary physical nodes
link10
Temporary links
Persistent
links
Figure 2: United distributed physical-virtual world.
A variety of effective access mechanisms to
nodes, links and their groups, say, by physical
coordinates, electronic addresses, by names, via
traversing links, etc. (classified as tunnel and surface
navigation) abound in the model, using both
selective and broadcasting access modes.
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
93

Waves. Solutions of any problems in this
formalized world in WAVE-WP are represented as
its coordinated parallel navigation (or exploration,
invasion, grasping, coverage, flooding, conquest,
etc.) by some higher-level forces, or waves (Sapaty,
1999, 2000, 2002). These bring local operations,
control and transitional data directly into the needed
points of the world, to perform jobs there. The
obtained results, together with the same or other
operations may, in their turn, invade the other world
parts, and so on. In a most abstract form this “agent-
less” spatial process may look like shown in Fig. 3,
with parallel asynchronous navigation, spatial
intersection, branching and looping.
Wave 1
Wave 2
Distributed
physical &
virtual world
Spatial
looping
of waves
Sets of space
locations
reached &
logical
synchronization
Intersection
of moves in
space
Mutually
dependent
branching
of moves
Figure 3: Parallel conquest of distributed worlds by waves.
During the world navigation, which may be loose
and free or strictly (both hierarchically and
horizontally) controlled, waves can modify the very
world they evolve in and move through, as well as
create it from scratch (including any distributed
structures and topologies). Waves may also settle
persistent cooperative processes in its different
points, subsequently influencing, governing its
further development and evolution in the way
required.
4 HIGHER-LEVEL WAVE-WP
LANGUAGE
The system language expressing full details of this
new control automaton has been developed. Having
recursive space-navigating and space-penetrating
nature, it can operate with both information and
physical matter. The language can also be used as a
traditional one, so no integration with (and/or
interfaces to) other programming models and
systems may be needed for solving complex
distributed knowledge processing and control
problems.
Very compact syntax of the language, as shown
in Fig.4 (see also Sapaty, Sugisaka, 2002), makes it
particularly suitable for direct interpretation in
distributed environments, being supported by
effective program code mobility in computer
networks. In this description, braces set up zero or
more repetitions of a construct with a delimiter at its
right; square brackets identify an optional construct;
semicolon allows for sequential, while comma for
parallel invocation of program parts; and
parentheses are used for structuring of WAVE-WP
programs (or waves).
Successive program parts, or advances, develop
from all nodes of the set of nodes reached (SNR) by
the previous advance, whereas parallel or
independent parts, moves, constituting the advances,
develop from the same nodes, while splitting
processes and adding their own SNRs to the
resultant SNR of the advance.
Figure 4: Syntax of WAVE-WP language.
Elementary acts represent data processing, hops
in both physical and virtual spaces, and local control.
Rules establish non-local constraints and contexts
over space-evolving waves like, for example, the
ability to create networks, also allowing WAVE-WP
to be used as a conventional language. Variables,
called spatial (as being scattered in space), can be of
the three types: nodal, associated with virtual or
physical nodes and shared by different waves;
frontal, propagating with waves as their sole
property; and environmental, accessing elements of
internal and external environments navigated by
waves.
This recursive navigational structure of the
language allows us to express highly parallel and
fully decentralized, albeit strongly controlled and
coordinated, operations in distributed worlds in a
most compact way – in the form of integral space
processing and transformation formulae. These
formulae resemble data processing expressions of
traditional programming languages, but can now
operate in and process the whole distributed world.
wave Æ { advance ; }
advance Æ { move , }
move Æ constant | variable | { move act } |
[ rule] ( wave )
constant Æ information | physical-matter
variable Æ nodal | frontal | environmental
act Æ flow-act | fusion-act
rule Æ forward-rule | echo-rule
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
94
5 IMPLEMENTATION BASICS
On the implementation layer, the automaton widely
uses high-level mobile cooperative program code
self-spreading and replicating in networks, and can
be easily implemented on any existing software or
hardware platform. As the automaton can describe
direct movement and processing in physical world,
its implementation may need to involve a multiple
mobile hardware – with or without human
participation. A network of (hardware or software)
communicating WAVE-WP language interpreters
(or WI), which can be mobile if installed in manned
or unmanned vehicles, should be embedded into the
distributed world to be controlled (Sapaty, 1999,
2002), placing WIs in world’s most sensitive points,
as shown in Fig. 5.
During the spatial execution of system scenarios
in WAVE-WP, individual interpreters can make
local information and physical matter processing as
well as physical movement in space. They can also
partition, modify and replicate program code,
sending it to other interpreters (along with local
transitional data), dynamically forming track-based
distributed interpretation infrastructures.
The automaton can also exploit other systems as
computational and control resources, with or without
preliminary consent, i.e. in a (remotely controlled)
virus-like mode. For example, existing network
attacks (especially DDoS) may be considered as a
possible malicious (simplified, degenerated, and
distorted) implementation of the automaton.
WI
Spatial scenario 1
Spatial scenario 2
Distributed
physical &
virtual World
WI
WI
WI
WI
WI
WI
WI
Creating distributed
infrastructures
WAVE-WP
interpreters
Sensitive
points
Figure 5: A network of interpreters with self-spreading
spatial scenarios in WAVE-WP.
6 THE DISTRIBUTED WAVE-WP
INTERPRETER
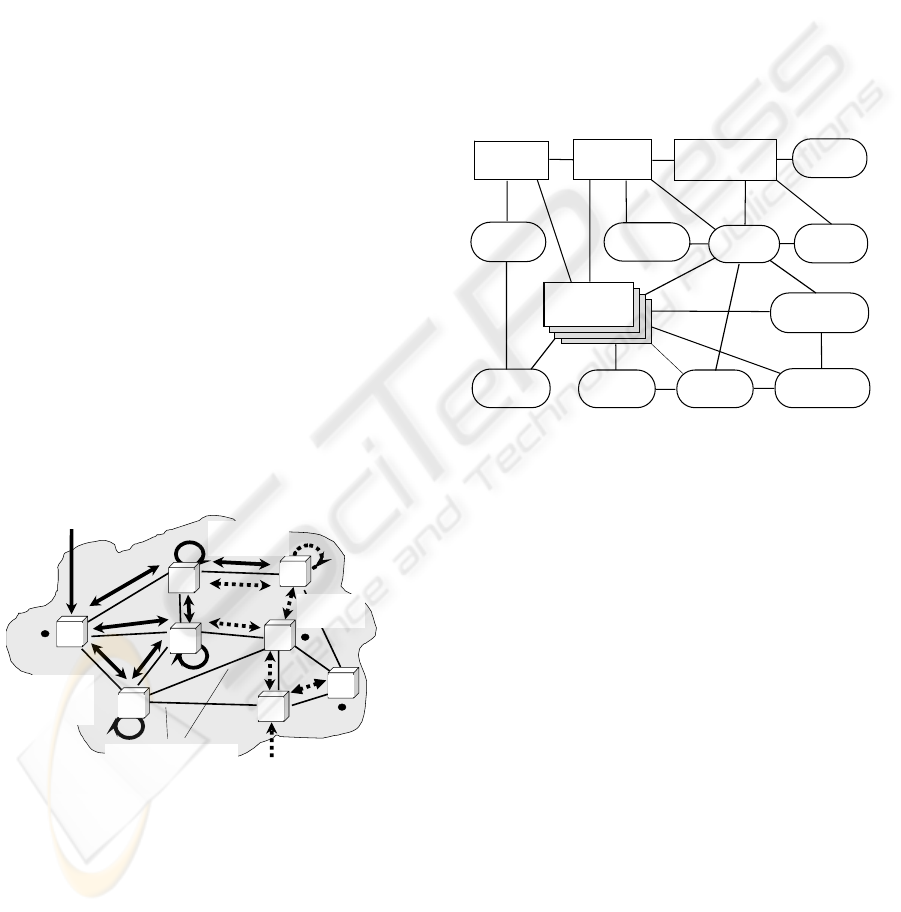
The WAVE-WP interpreter consists of a number of
specialized processors working asynchronously and
in parallel, handling and sharing specific data
structures like waves queue, incoming and outgoing
queues, local part of the distributed knowledge
network, track forest, etc., and being responsible for
different interpretation operations (parser, data
processor, control processor, communication
processor, sensors and motion, etc.), see Fig. 6 (also
Borst, 2002; Sapaty, 1993, 1999).
The interpreter can be easily implemented on any
existing platform, in software or directly in silicon.
The existing public domain WAVE system (in C
under Unix/Solaris/linux) operating via the Internet
had been used in different countries, especially for
distributed network management (Gonzalez-
Valenzuela, Vuong, 2002) and simulation of
battlefields (Sapaty, 1999, 2002).
Frontal
Variables
Parser
Incoming
Queue
Outgoing
Queue
Track
Forest
Wave
Queue
Suspended
Waves
Nodal
Variables
Knowledge
Network
Control
Processor
Environmental
Variables
Wave
Identities
Communication
Processor
Operation
Processors
Figure 6: General organization of WAVE-WP interpreter
The interpreter may also have physical body, say,
as a mobile or humanoid robot, if engaged in
operations in physical world, or can be body-
mounted on humans. The whole network of such
“doers” can be mobile, changing structure, as robots
or humans can be moving at runtime (Sapaty,
Sugisaka, 2002a). Elementary expressions and
operations of WAVE-WP language may trigger a
combination of physical movements of doers in
space, transference of information and physical
matter between the doers both electronically, at a
distance, and in a direct, tactile contact, as well as
cooperation and group behavior of doers.
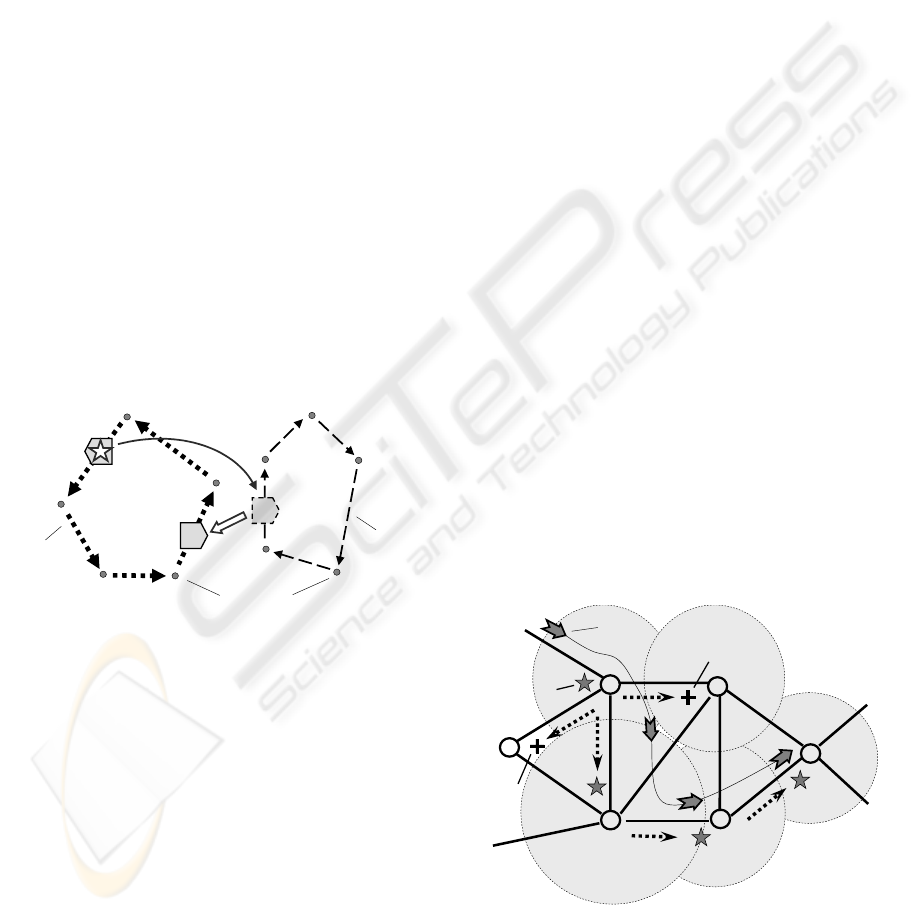
The following program first hops into some node
a of the distributed KN (located, say, in Doer.1),
picks up a certain matter from the environment there
into a frontal variable F, also information (integer 5)
into F1, then propagates via virtual link p to another
node b (which may happen to reside in Doer.2),
bringing the matter and information into the latter
doer. The rest of program (or wave) will be
performed from the destination doer.
direct#a; F=“matter”; F1=5; p#b; wave
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
95
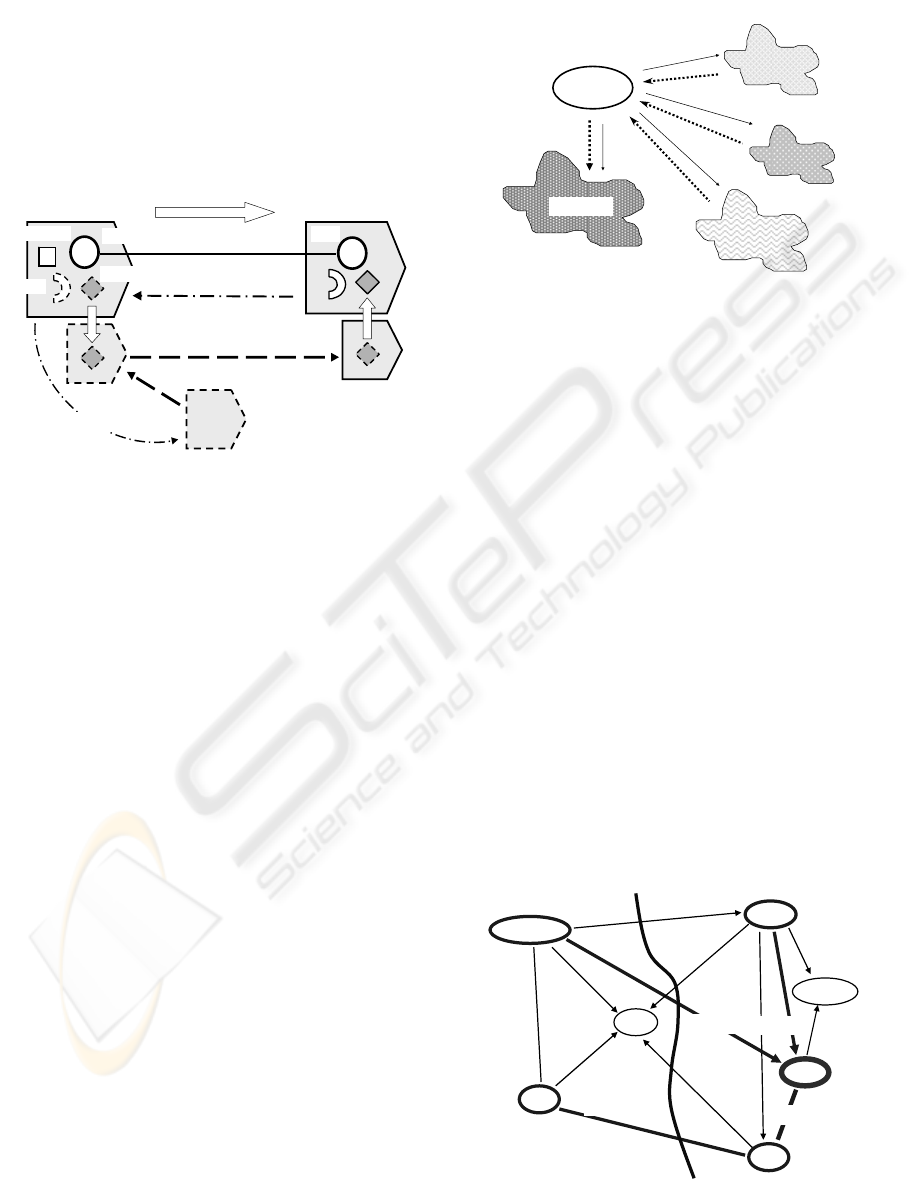
Coming to node b with F1 and wave could be
done purely wirelessly, but the transference of F
needs direct physical contact, which can be
performed by either Doer.1 or Doer.2 (or both)
moving for a meeting, or by engagement of another
doer, say Doer.3, for the matter’s transference, as
shown in Fig. 7.
Control, wave, frontal variables
Doer.1
Doer.2
a
b
p
Doer.3
Doer.3
Direct
contact
Direct
contact
Request & coordinates
Doer
movement
Confirmation
1
4
2
6
7
3
5
Waves
Physical matter
Information
Node
Node
Link
Order of
operations
Figure 7: Transference of physical matter between doers
7 DIRECT ACCESS TO
PHYSICAL WORLD
The model can describe complex operations in PW
on a semantic level, abstracting from
implementation, with parallel control directly
evolving in physical space, covering the latter.
Multiple operations can be performed cooperatively
by groups of robots or humans, with transfers of
information and physical matter between the
interpreters embedded into physical bodies,
communicating both electronically and mechanically.
A coordinated delivery of physical matter to remote
points and its synchronized processing by a group of
robots had been demonstrated (Sapaty, Sugisaka,
2002a). A description of coordinated robotic column
movement and its synchronized operation had been
shown (Sapaty, Sugisaka, 2001).
As an elementary example of direct operations in
PW, the following program, applied in a certain
workplace, brings from remote locations sand,
cement and water, mixing them and making concrete,
and then delivers the obtained result into another
remote location (assigning it to nodal variable
Nconcrete there), using spatial programs w1-w4
for accessing the mentioned locations physically
(see Fig. 8):
(W4; Nconcrete) =
(w1; “3 tons of sand”) +
(w2; “2 tons of cement”) +
(w3; “4 tons of water”)
sand
cement
water
work place
concrete
place 1
place 3
place 2
w4
w3
w2
w1
Figure 8: Direct operations on physical matter.
8 DISTRIBUTED KNOWLEDGE
REPRESENTATION AND
PROCESSING
Dynamically creating arbitrary knowledge networks
in distributed spaces, which can be modified at
runtime, WAVE-WP can implement any knowledge
processing and control systems in parallel and fully
distributed way, similar to WAVE (Sapaty, 1999). A
program package in WAVE was demonstrated for
basic problems of the graph and network theory,
where each graph node can reside on a separate
computer. The package included finding spanning
trees, shortest paths, articulation points, maximum
cliques, diameter and radius, etc., also self-
recovering network topologies after indiscriminate
damages of their nodes and links. Parallel simulation
of other control models in WAVE-WP, like Petri
nets, was demonstrated too.
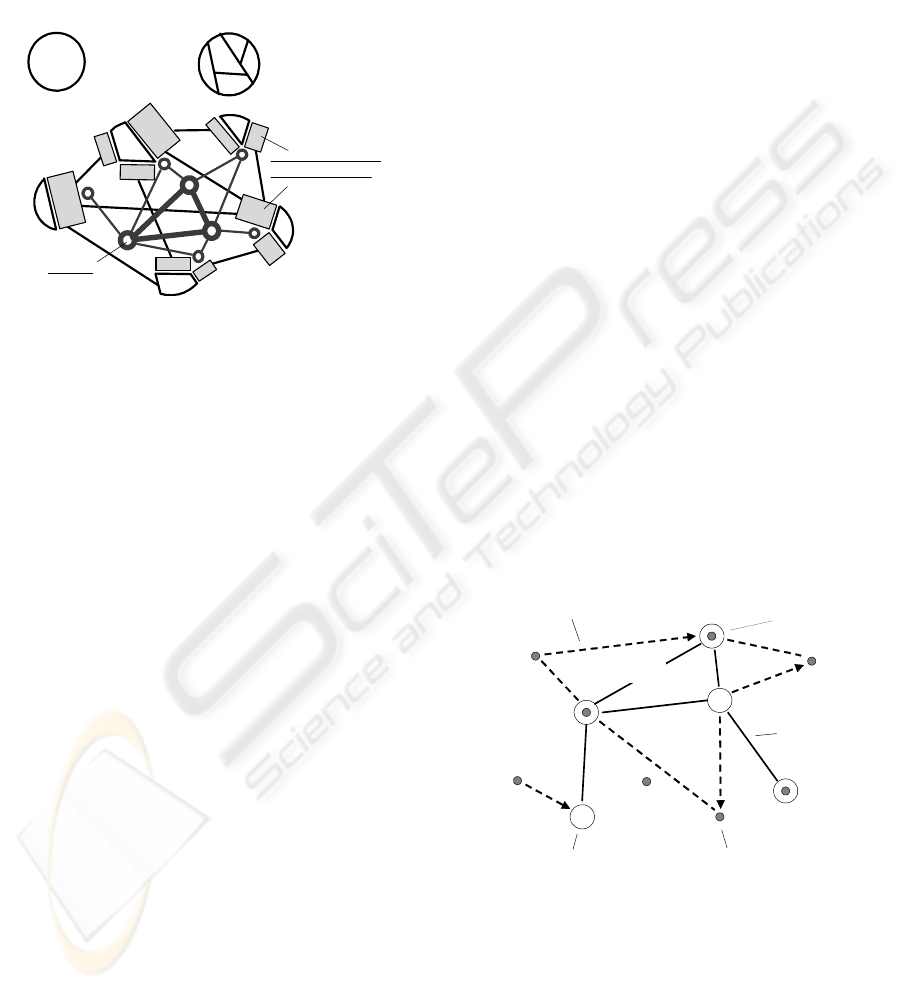
As an example, let us consider a KN of Fig. 9,
which may be arbitrarily distributed between
computers of Internet or robots, say, Robot.1 and
Robot.2.
Masanori
Peter
Bob
Doug
John
beer
whiskey
like
colleagues
know
like
like
respect
like
like
like
respect
hate
Robot.1
Robot.2
colleagues
3
2, 4
2
3
1
Figure 9: Distributed knowledge representation.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
96
In WAVE-WP, complex knowledge processing
tasks can be formulated and solved in parallel,
regardless of the knowledge distribution. Say, to
answer the question: “Who of John’s colleagues is
respected by both Masanori and Peter”, the
following simple program will be sufficient:
direct#John; colleagues#any;
and(
andparallel(-respect#(Masanori, Peter)),
USER = CONTENT)
It provides the final answer Doug, with the
decision-finding process shown in bold and stages
numbered in Fig. 9 (parallel operations emerging on
stage 3).
9 OPERATING IN PHYSICAL
WORLD UNDER THE
GUIDANCE OF VIRTUAL
WORLD
Operating in the unity of physical and virtual worlds,
the WAVE-WP model can effectively investigate
physical worlds and create their reflection in the
form of distributed virtual worlds. The latter can
guide further movement and search operations in the
distributed PW, modifying and updating itself, and
so on. Such physical-virtual world unity in one
model, where both worlds can be open and dynamic,
allows us to create integral intelligent manned or
unmanned systems operating effectively in
unpredictable environments.
This has been demonstrated on an example of
optimized parallel territory search by a group of
robots sharing distributed knowledge representation
of the area of interest, which can be modified and
updated (say, reduced or extended) at runtime
(Sapaty, Sugisaka, 2003). Parallel operations in PW
can be optimized in advance by solving the
problems in VW first, in a parallel simulation mode,
mapping subsequently or simultaneously the
obtained solutions into the PW.
For example, the space to be searched can be
described by a set of connected polygons and
represented in WAVE-WP by a KN reflecting the
polygons connectivity graph and individual polygon
data, as shown in Fig. 10. This spatially shared KN
can be arbitrarily distributed between robots and
constantly updated by them in different points.
1
3
2
4
7
5
86
p6
p5p4p3
p2
p1
p8
p7
Robot.1
Robot.3
Robot.2
p
p
p
p
p
p
p
p
g
g
g
g
g
Figure 10: Space model distribution between robots
For example, by visiting polygons only once and
moving to free neighboring polygons, while
checking the states of surrounding neighbors
sequentially, the program, consisting of three
competing branches starting in polygons 1, 5, and 7
by different robots, will be as follows (using specific
external procedure
move_clean):
direct#(1,5,7); M=1; (p#)?move_clean;
repeat(or(g#; grasp(M==nil; M=1));
(p#)?move_clean)
10 INTELLIGENT NETWORK
MANAGEMENT
Integrating traditional network management tools
and systems, and dynamically extracting higher-
level knowledge from raw data via them, WAVE-
WP, same as WAVE, establishes a higher,
intelligent layer, allowing us to analyze varying
network topologies, regulate network load, and
redirect traffic in case of line failures or congestions
(Sapaty, Zorn, 1991). Representing a universal
spatial control model based on coordinated code
mobility and dynamic tracking, WAVE-WP can also
be used for creating essentially new, universal and
intelligent, network protocols. These, along with
traditional data delivery, will be able to make local
and global automatic decisions on the network
management, self-recovery after failures, and
runtime topology restructuring and optimization.
As the simplest example for distributed network
management in WAVE-WP, the following
maximum parallel program creates shortest path tree
(SPT) from some node a, covering the whole
network in a spatial navigation mode, by self-
replicating mobile code (see also Sapaty, 1999):
direct#a;
repeat(#;Fd+=L;Nd==,Nd>Fd;Nd=Fd;Np=B)
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
97
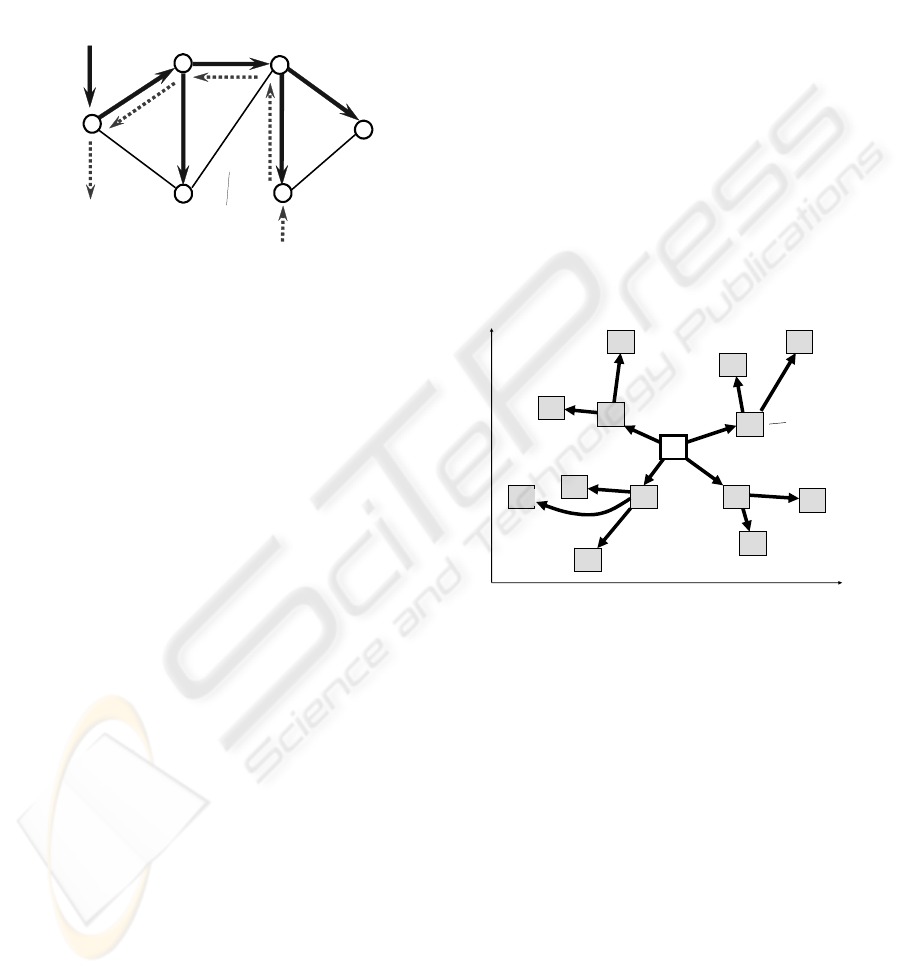
Another program, starting from node e, collects
the shortest path from a to e in a reverse order via
the SPT found and recorded in a computer network
by the previous program:
direct#e;repeat(Fp&=C;#Np);U=Fp
The work of these two programs is shown in Fig. 11.
a
f
e
d
c
b
1
1
4
3
2
1
2
2
e,d,b,a
result
Shortest path tree creation program
Shortest path collection program
Link weights
Figure 11: Distributed dynamic shortest path solution.
11 ADVANCED CRISIS
REACTION FORCES
Smaller, dynamic armies, with dramatically
increased mobility and lethality, represent nowadays
the main direction, also challenge, in the
development of advanced military forces oriented on
crisis situations. These forces should be capable of
conducting non-traditional combat, peacekeeping,
and recovery operations, withstanding asymmetric
threats, and operating in unpredictable environments.
They may also effectively use multiple unmanned
units, such as mobile robots.
The WAVE-WP technology can quickly
assemble a highly operational battle force from
dissimilar (and possibly casual) units, setting
intelligent command and control (CC)
infrastructures over them (Sapaty, 2000a). These
infrastructures can follow global mission scenarios
and make autonomous decisions in manned,
automated, or fully unmanned mode. In case of
damages, the technology can either restore the
previous CC infrastructure (with, possibly, reduced
set of units), or make complete runtime
reassembling of the entire force, with a new CC
infrastructure, taking into account remaining
operational units and their physical locations. Both
local and global restructuring and reassembling can
be carried out at runtime, without the loss of overall
operational capability.
As an example, the following parallel program
creates and regularly updates an optimal hierarchical
CC infrastructure based on a physical neighborhood,
with top of the hierarchy always associated with the
most central unit of a distributed force. Individual
units (manned or unmanned vehicles, computerized
humans) can be on a constant move, but the optimal
spatial CC hierarchy is maintained under any
circumstances (including indiscriminate destruction
of units).
repeat(
Faver=average(direct#all; WHERE);
Nstart=min(direct#all;
(Faver, WHERE)?distance_ADDRESS):2;
direct#Nstart;
quit(
Frange=r40; N=1;
repeat(
direct#Frange; grasp(N==nil; N=1);
[any#any; LINK=nil];
[create(-infra#BACK)]));
USER=ADDRESS; TIME+=360)
A possible hierarchical infrastructure, created
and maintained by this program, is shown in Fig. 12.
1
9
5
13
4
7
10
11
12
14
8
3
6
2
infra
infra
infra
infra
X
Y
Most central unit
Mobile
crisis
reaction
units
Figure 12: Creating of a neighborhood hierarchy
12 MASSIVE COOPERATIVE
ROBOTICS
Autonomous robotic armies for civil and military
applications, comprising thousands of cooperating
mobile units, may well become today’s reality in
WAVE-WP (Sapaty, Sugisaka, 2002a). High-level
mission scenarios can be injected into such
organizations from any robotic unit, dynamically
covering and grasping the whole distributed system.
Massive coordinated operations in physical
spaces can automatically emerge during parallel
interpretation of the WAVE-WP scenarios, while
preserving the overall system integrity and ability of
pursuing global goals. The scenarios can be
represented in such a way that they should (and will
be able to) survive by any means, while individual
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
98
robots may fail, with system intelligence being the
feature of the whole campaign, rather than of
individual robots.
The following program sets up a number of
cyclic routes (with waypoints given) to be patrolled,
and then makes parallel branches compete and seize
available robotic bodies themselves, to follow these
routes. If a robot finds some irregularities on its own
route (using infrared sensors), it reports this to the
user of the whole system, and also reprograms other
robots in order to follow its own route for some
period of time. After the expiration of this time,
these other robots return to patrol their own routes.
The work of this program (for only two robots
supposedly available) is depicted in Fig. 13.
Fpoints=(x4y3,x7y3,x9y7,x5y10,x2y6),
Fpoints=(x11y4,x11y8,x13y10,x15y8,x14y3),
.............................;
or(direct#all; grasp(Nmark==; Nmark=1));
Np=Fpoints;
repeat(
WHERE=Np:1; Np&=Np:1; Np:1=nil; Fp=Np;
free(?infraredCheck; USER=alarm_WHERE;
direct#any; Np=Fp; TIME+=1800;
Np=Fpoints))
x13 y10
x7 y3
x5 y10
x2 y6
x4 y3
x9 y7
x11 y4
x11 y8
x14 y3
x15 y8
Robot.1
Robot.2
Alarm !
Robot.2
waypoints
Route of
Robot.1
Route of
Robot.2
Figure 13: Cooperative region patrol by two mobile robots
13 DISTRIBUTED ROAD AND AIR
TRAFFIC MANAGEMENT
Distributed computer networks working in WAVE-
WP and covering the space to be controlled can be
efficiently used for both road and air traffic
management. The WAVE model provides
simultaneous tracking of multiple objects in PW by
mobile intelligence spreading in the VW, via
computer networks (Sapaty, Corbin, Seidensticker,
1996; Sapaty, 1999; Sapaty, Klimenko, Sugisaka,
2004).
Assigning personal active mobile code to each
object under control brings high flexibility to the
distributed control system, with parallel and
cooperative tracking of multiple objects and making
non-local decisions, along with runtime optimization
and routing. This may especially be important in
crisis situations, where a priori flight schedules
become useless, and the distributed management
infrastructure is damaged. The surface roads can be
destroyed too, and traffic routing may need to be
fully dynamic, in order to reach destinations by
individual vehicles in suitable time. Related
distributed management scenarios with mobile
intelligence had been demonstrated live in WAVE
via the Internet in different projects.
As an elementary example, the following simple
mobile program (using an external procedure
Fobject?seen) seizes control of a certain
moving object, and then follows its PW movement,
propagating itself via the computer network. It
launches subordinate search agents in neighboring
computers (associated, say with neighboring radar
stations) unless the disappeared object is found
elsewhere and followed again. The work of this
program is shown in Fig. 14.
Fobject=TRW562;
repeat(
repeat(Fobject?seen; TIME+=10);
any#any; Fobject?seen)
Many such objects can be simultaneously seized
and controlled by mobile intelligences in WAVE-
WP, and any payload can be added to the program
above, including detailed studying of the behavior of
controlled objects, with their possible subsequent
rerouting or destruction.
a
f
e
d
c
b
Moving aerial
object
Self-
replicating
tracking
agent
Tracking
failure
Tracking
failure
Figure 14: Distributed tracking of moving objects.
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
99
14 AUTONOMOUS DISTRIBUTED
COGNITIVE SYSTEMS
Cognitive systems belong to the most advanced class
of intelligent systems -- the ones aware of what they
are doing. While cognitive systems include reactive
and deliberative processes, they also incorporate
mechanisms for self-reflection and adaptive self-
modification.
The WAVE-WP paradigm allows for the
description of interacting deliberative, reactive, and
reflective processes on a semantic level, representing
the whole mission rather than individual robots
(Sapaty, Kawamura, Sugisaka, Finkelstein, 2004).
This provides new degrees of freedom for
autonomous robotic teams, where collective
behavior of robots emerges as a derivative of
parallel and distributed interpretation of WAVE-WP
language, in the united physical and virtual world.
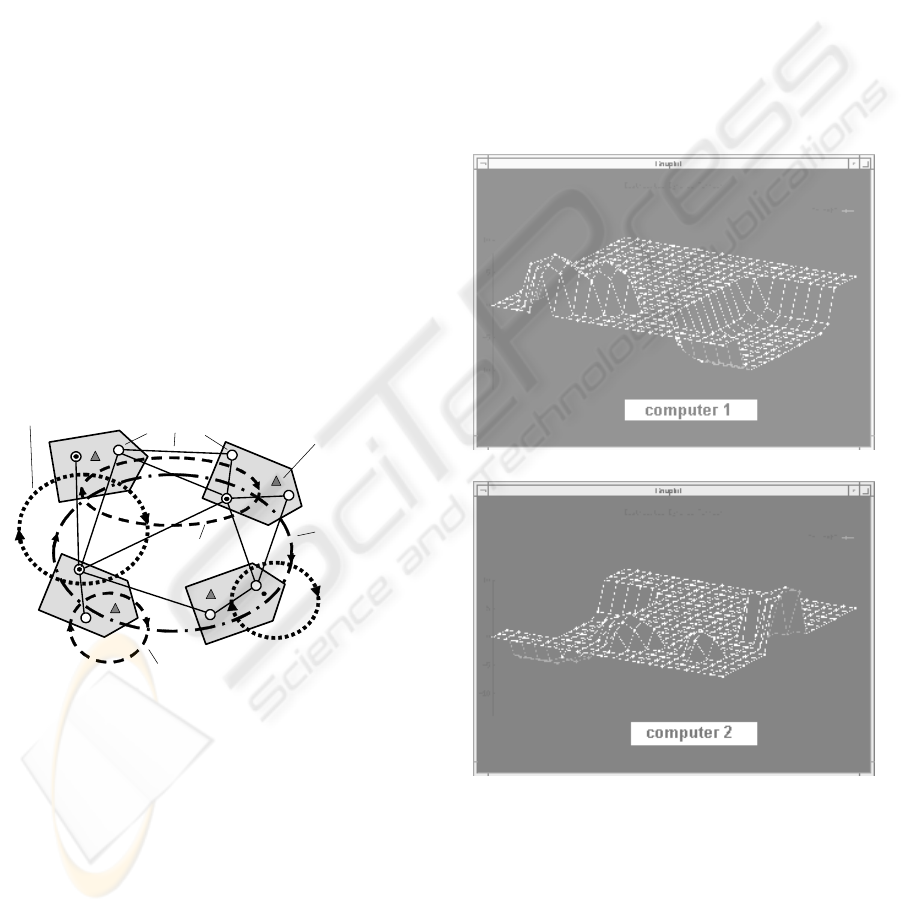
The mission-to-hardware mapping process may
be fully distributed, not requiring central resources,
and each robot may happen to be involved at any
level of the distributed command and control process
in any moment of time, as shown in Fig. 15. Failed
robots can be automatically substituted at runtime
without loss of the overall mission integrity.
Local deliberation
Distributed
reaction
Global
distributed
reflection
Distributed
deliberation
Local
reaction
Sensors
Distributed
Knowledge
Network
Robot.1
Robot.2
Robot.3
Robot.4
Figure 15: Fully distributed cognitive system.
15 DISTRIBUTED INTERACTIVE
SIMULATION
Having full control over distributed worlds,
including their runtime creation and modification,
WAVE-WP allows for highly efficient, scalable,
distributed simulation of complex dynamic systems,
like battlefields, in open computer networks, using
potentially unlimited number of computers working
together (Sapaty, Corbin, Borst, 1995).
Due to full distribution of the simulated space
and entities operating in it, there is no need to
broadcast changes in terrain or positions of moving
entities to other computers, as usual. Each simulated
entity operates in its own (current) part of the
simulated world, within the range of its sensors,
communicating locally with other such entities,
exactly as in the real world. The entities can move
freely through the simulated space (and between
computers, if needed).
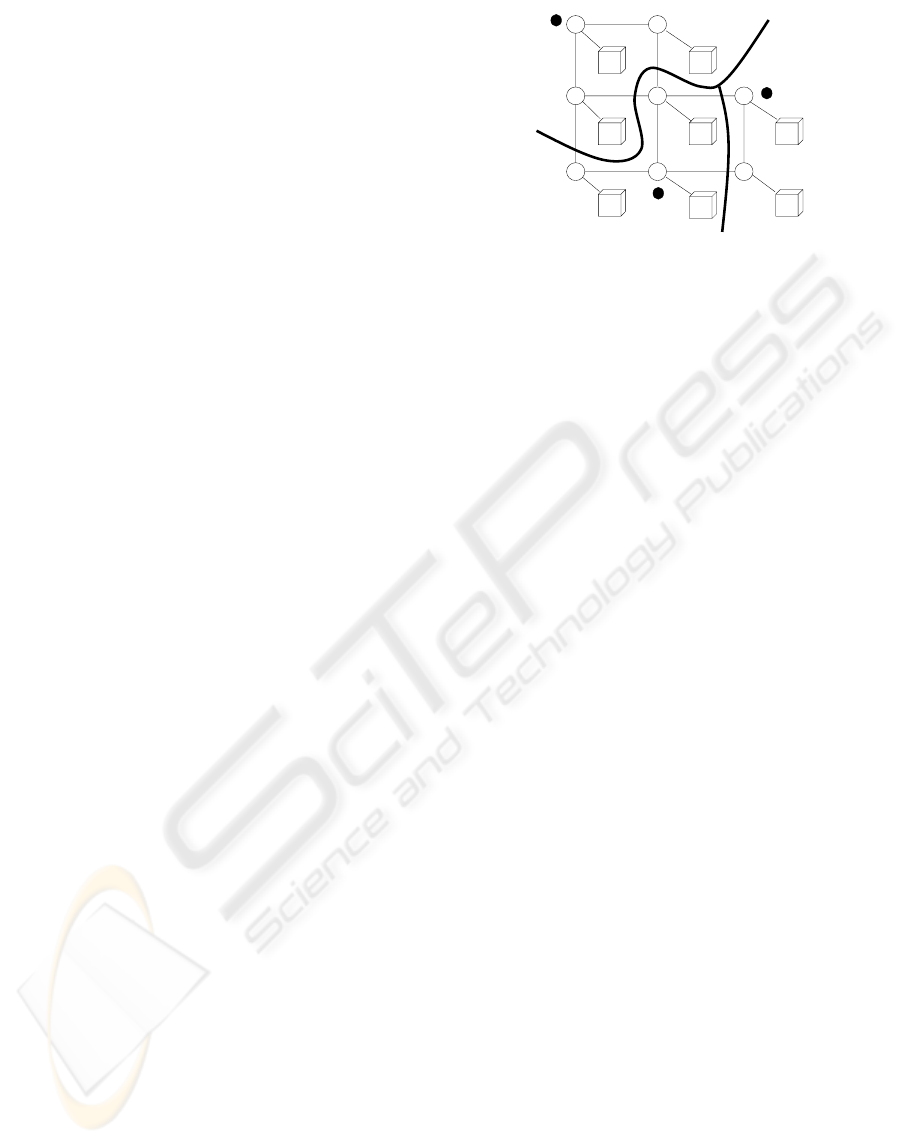
Using volatile virus-like spatial algorithms in
WAVE-WP, a fully dynamic terrain can be
effectively modeled in a distributed space. Its parts
like clouds, floods, smog, mountains, landslides, and
craters can grow, move and spread seamlessly
between computers (Darling, Sapaty, Underhill,
1996; Sapaty, 1999), as shown in Fig. 16a,b.
F
igure 16: Seamless distributed dynamic terrain modeling.
a)
b)
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
100

16 INTELLIGENT GLOBAL
DEFENSE AND SECURITY
INFRASTRUCTURES
WAVE-WP can also be effectively used in a much
broader scale, especially for the creation of
intelligent national and international infrastructures
of different natures, widely using automated and
fully automatic control and advanced robotics. Such
global systems may effectively solve the problems
of distributed air defense, where multiple hostile
objects penetrating country’s air space can be
simultaneously discovered, chased, analyzed, and
destroyed using a computerized networked radar
system as a collective artificial brain operating in
WAVE-WP, as shown in Fig. 17 (see also Sapaty,
Klimenko, Sugisaka, 2004).
Permanent
channels
Dynamic and
casual channels
Sea, undersea, aerial
or space units
Spatial solution 1
Spatial solution 2
Figure 17: Distributed infrastructures and spatial solutions
Within the unified command and control
infrastructures, provided by the technology, different
types of unmanned air vehicles may be used, for
example, as possible mobile sensor, relay, or even
air traffic management stations, supplementary to
the ground ones, especially when the latter get
damaged or operate partially.
In other non-local applications, WAVE-WP,
using worldwide computer networks, may
effectively discover and trace criminals and their
distributed organizations, penetrate into malicious
infrastructures, studying and eliminating them, with
possible additional involvement of special hardware
and troops (Sapaty, 2002).
17 CONCLUSIONS
WAVE-WP allows for a more rational and universal
integration, management, simulation, and recovery
of large complex systems than many other
approaches – by establishing a higher level of their
vision and coordination, symbolically called “over-
operability” (Sapaty, 2002) versus (and in
supplement to) the traditional “interoperability”.
Distributed system management and
coordination scenarios in WAVE-WP are often
orders of magnitude simpler and more compact than
usual, due to high level and spatial nature of the
model and language. They often help us to see the
systems and solutions in them as a whole, avoiding
tedious partitioning into parts (agents) and setting
their communication and synchronization.
These and other routines are effectively shifted
to the efficient automatic implementation by
dynamic networks of WAVE-WP interpreters.
Traditional software and hardware agents are being
requested, created, and have sense only when
required in certain moments of time, during the
spatial development of self-evolving (conceptually
agent-less) parallel mission scenarios.
A detailed description of the WAVE-WP model
and its extended applications can soon be available
(Sapaty, 2004).
REFERENCES
Borst, P.M., 2002. An architecture for distributed
interpretation of mobile programs. PhD Thesis, also
published as a book, ISBN 3-8316-0103-8.
Darling, J.C.C., Sapaty, P.S., Underhill, M.J., 1996.
Distributed virtual reality: a fully dynamic approach.
In Proc. 15th Workshop on Standards for the
Interoperability of Distributed Simulations. IST UCF,
Orlando, FL.
Gonzalez-Valenzuela, S., Vuong, S.T., 2002. Evaluation
of migration strategies for mobile agents in network
routing. In Proc. The 4th International Workshop
MATA'02, Barcelona, Spain.
Sapaty, P.S., Zorn W., 1991. The WAVE model for
parallel processing and its application to computer
network management. In International Networking
Conference INET'91, Copenhagen.
Sapaty, P.S., 1993. A distributed processing system.
European Patent No. 0389655, European Patent Office.
Sapaty, P.S., Corbin, M.J., Borst, P.M., 1995. Towards the
development of large-scale distributed simulations. In
Proc. 12th Workshop on Standards for the
Interoperability of Distributed Simulations. IST UCF,
Orlando, FL.
Sapaty, P.S., Corbin, M.J., Seidensticker, S., 1996. Mobile
intelligence in distributed simulations. In Proc. 14th
Workshop on Standards for the Interoperability of
Distributed Simulations. IST UCF, Orlando, FL.
Sapaty, P.S., 1999. Mobile processing in distributed and
open environments, John Wiley & Sons. ISBN:
0471195723, New York.
WAVE-WP (WORLD PROCESSING) TECHNOLOGY
101

Sapaty, P.S., 2000. High-level spatial scenarios in WAVE.
In Proc. The Fifth International Symposium on
Artificial Life and robotics, (AROB 5th’00), Beppu,
Japan.
Sapaty, P.S., 2000a. Basic distributed control model and
technology for mobile crisis reaction forces and their
united air defense. In Proc. NATO Symosium on
System Concepts for Integrated Air Defense of
Multinational Mobile Crisis Reaction Forces.
Valencia, Spain.
Sapaty, P., Sugisaka, M., 2001. Towards the distributed
brain for collectively behaving robots. In Proc.
International Conference on Control, Automation and
Systems, ICCAS. Cheju National University, Jeju
Island, Korea.
Sapaty, P.S., 2002. Over-operability in distributed
simulation and control. The MSIAC's M&S Journal
Online. Winter Issue, Volume 4, No. 2, Alexandria,
VA,
http://www.msiac.dmso.mil/journal/WI03/sap42
_1.html
.
Sapaty, P.S., Sugisaka, M., 2002. A Language for
programming distributed multi-robot systems. In Proc.
The Seventh International Symposium on Artificial
Life and Robotics (AROB 7th ‘ 02). Beppu, Japan.
Sapaty, P., Sugisaka, M., 2002a. Universal distributed
brain for mobile multi-robot systems. In book
Distributed Autonomous Robotic Systems. H. Asama,
T. Arai, T. Fukuda, and T. Hasegava (Eds.), Springer-
Verlag Tokyo, SPIN: 10869189.
Sapaty, P., Sugisaka, M., 2003. Optimized space search by
distributed robotic teams. In Proc. Symposium
Unmanned Systems 2003. Baltimore Convention
Center, USA.
Sapaty, P., Klimenko, V., Sugisaka, M., 2004. Dynamic
air traffic management using distributed brain concept.
Mathematical Machines and Systems. ISSN:1028-
9763, No.1.
Sapaty, P., Kawamura, K., Sugisaka, M., Finkelstein, R.,
2004. Towards fully distributed cognitive systems.
In Proc. The Ninth International Symposium on
Artificial Life and Robotics (AROB 9th ‘ 04). Beppu,
Japan.
Sapaty, P. S., 2004. Ruling Distributed Dynamic Worlds,
to be publ. by John Wiley & Sons, New York.
ICINCO 2004 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
102
