
DYNAMIC NEGOTIATION FOR REAL-TIME
MANUFACTURING EXECUTION
L.Q. Zhuang, J.B. Zhang, B.T.J. Ng, Y. Tang, Y.Z. Zhao
Singapore Institute of Manufacturing Technology, 71 Nanyang Drive, Singapore
Ke
ywords: Multi-Agent System, Performance and Cost for Manufacturing Execution, Agent Consortium, Dynamic
Negotiation
Abstract: This paper presents a dynamic negotiation framework for real-time execution in self-organised
manufacturing environments. The negotiation strategies in this framework bridge the gap between
distributed negotiation of self-interested agents and cooperative negotiation among agent groups. In
particular, the proposed framework is based on the model of Performance and Cost for Manufacturing
Execution (PCME). By forming the dynamic organisation called agent consortium, individual agents
negotiate over the PCME in order to optimise the resource allocation under time constraints and uncertainty
of job execution, and resolve the conflicts to fulfil the goal of the overall system. The ultimate goal of the
framework is to reduce the negotiation time, make effective use of resources, adapt to the changes in
execution and increase the throughput of the entire system. Experimental work based on PCME has been
carried out to demonstrate the high performance of this approach despite unanticipated and dynamic
changes in the manufacturing execution environments.
1 INTRODUCTION
In modern complex manufacturing execution
environments, autonomous or self-organised systems
are being deployed to deal with increasingly diverse
operations and to control real-time dynamic
situations under uncertainty. These real-time tasks
are further complicated by coalition coordination.
The need for more flexibility, robustness and
scalability and the trend to handle increasing
complexity is driving research into the area of
distributed intelligent computation.
Distributed artificial intelligence (DAI) is the
emerging information technology to meet the new
challenges. Over the past few years, agent-based
computing has been hailed as the next significant
breakthrough in areas of DAI (Sargent, 1992).
Intelligent agents and multi-agent systems (MAS)
are able to conduct independent jobs in open and
unpredictable environments. The properties of an
intelligent agent, such as social ability, mobility,
autonomy, reactivity and pro-activeness have made
MAS a very relevant technology for various
manufacturing domains such as enterprise
integration, manufacturing planning, scheduling and
control, and holonic manufacturing systems (Shen,
1999). The MAS architecture is able to adapt itself
to changes and disturbances in the manufacturing
execution such as dynamic execution changes,
process changes and equipment failures etc. The
MAS architecture is also able to model the
manufacturing execution processes in distributed
ways to reduce the complexity of manufacturing
systems and to increase the interoperability between
the heterogeneous systems at the same time. As
such, more and more researchers are introducing the
agent technologies and MAS architecture to real-
time manufacturing areas, including manufacturing
execution, automated material handling and
autonomous robotic control systems (Deen, 2003).
Odell proposed “The Agile Manufacturing
Information System”, an agent-based model, which
defined cell agent architecture as self-contained unit
that had its own structure and behaviour (Odell,
2002). This model provided a conceptual
architecture and a general approach for agent-based
manufacturing systems. Jennings et al. proposed the
321
Q. Zhuang L., B. Zhang J., T. J. Ng B., Tang Y. and Z. Zhao Y. (2004).
DYNAMIC NEGOTIATION FOR REAL-TIME MANUFACTURING EXECUTION.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 321-326
DOI: 10.5220/0002651003210326
Copyright
c
SciTePress

agent-based control systems for electricity
transportation management and manufacturing line
control (Jennings 2003). The proposed negotiation
protocols between the agents in this distributed
manufacturing system had proven the effectiveness
of the framework. Fatima et al. introduced an
organisational policy known as TRACE (Task and
Resource Allocation in Computational Economy)
(Fatima 2001). The task allocation in the model is
NP-complete; hence the centralised solutions to the
problem are not feasible. TRACE is able to adapt
itself to any changes in the computational load by
reorganising the MAS. Dias et al. used market-based
coordination mechanism for optimisation of task and
resource allocation for multi-robot control systems
(Dias 2002). The optimisation for the activities of
robots can be achieved in an adaptive way. Ng et al.
proposed a framework called Self-Organising Multi-
Equipment Control (SOMEC) for the holonic
manufacturing systems (Ng, 2003). Intelligent units
(IU) in a set of equipment worked together to
achieve a global goal via the cooperative negotiation
approach. The above research work has
demonstrated that MAS is an effective architecture
to handle the adaptive manufacturing execution
processes in dynamic and uncertain environments.
However most of above research work only used the
fixed negotiation strategies for the different
manufacturing execution aspects and did not provide
goal recovery mechanism and time boundary of
negotiation for the autonomous agents.
For real-time manufacturing execution systems,
the response time is one of the important issues in
order to fulfil the manufacturing execution targets.
The normal timeframe for each task is restricted
within a few seconds for most of the execution
activities. Hence MAS architecture to support the
above manufacturing system only allows very
limited time for agents to interact with each other.
On the other hand, the resource utilisations within
the execution domain need to be optimised as well.
So the agent negotiation and coordination in such a
framework must be carried out in an adaptive way.
Traditional global optimisation techniques used in
the planning and scheduling systems are not suitable
for the resource and task allocation in the real-time
execution environment.
Agent negotiation and coordination for real-time
execution requires a unique mechanism. In this
paper we propose a multi-phase dynamic negotiation
framework that is focused on the fast and flexible
decision making aspect of the system so that it is
responsive enough for the time critical tasks and also
adaptive for dynamic environments. In the proposed
framework, a specific virtual organisation concept
called agent consortium is introduced for the MAS
architecture. The PCME is applied as a measurement
for agents to negotiate among the consortia and the
PCME value can be calculated based on the
structure of each consortium.
The remainder of the paper presents details of
the framework that can be used to coordinate the
execution activities of physical equipment units in
the manufacturing environment. Section 2 defines
the mathematical model for the dynamic negotiation.
Section 3 defines the multi-phase negotiation
strategies for real-time manufacturing execution. In
Section 4 we demonstrate the experimental work of
applying the proposed framework for an
autonomous Automated Storage and Retrieval
Systems (ASRS). In Section 5 the benefits of the
proposed framework will be summarised.
2 DYNAMIC NEGOTIATION
MODEL
Through decomposition, abstraction and
organisation, the traditional manufacturing execution
system that is organised in the hierarchical structure
can be transformed into the MAS architecture.
Dynamic integrative negotiation strategies are used
in the proposed framework to reach the contract
agreement in a co-operative way at the interests of
global goals, whereas individual agents are
responsible for allocating resources to ensure their
own interests when they carry out the tasks. The
proposed dynamic negotiation strategies aim to
strike a balance between the distributed negotiation
and the cooperative negotiation so that a more
effective and adaptive mechanism can emerge in the
new framework.
2.1 Agent Consortium
The agent consortium is defined as a group of
relevant agents with some capabilities to fulfil the
specific job in the system. The proposed approach
defines an initiator agent for each job. The initiator
agent issues the job contract with a specific
workflow. According to the workflow requirement,
each agent that is qualified for the job joins a
consortium with other agents involved in the job
processes. So the consortium can be formed by
relevant agents in form of a partially ordered set
(poset) according to the workflow dependencies.
The agent consortium can be represented by a
directed graph (digraph, see an example in Figure 1).
More than one consortium could be formed for each
job. In Figure 1, a node from P1 to P9 represents the
agent for the different cell controller or equipment.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
322
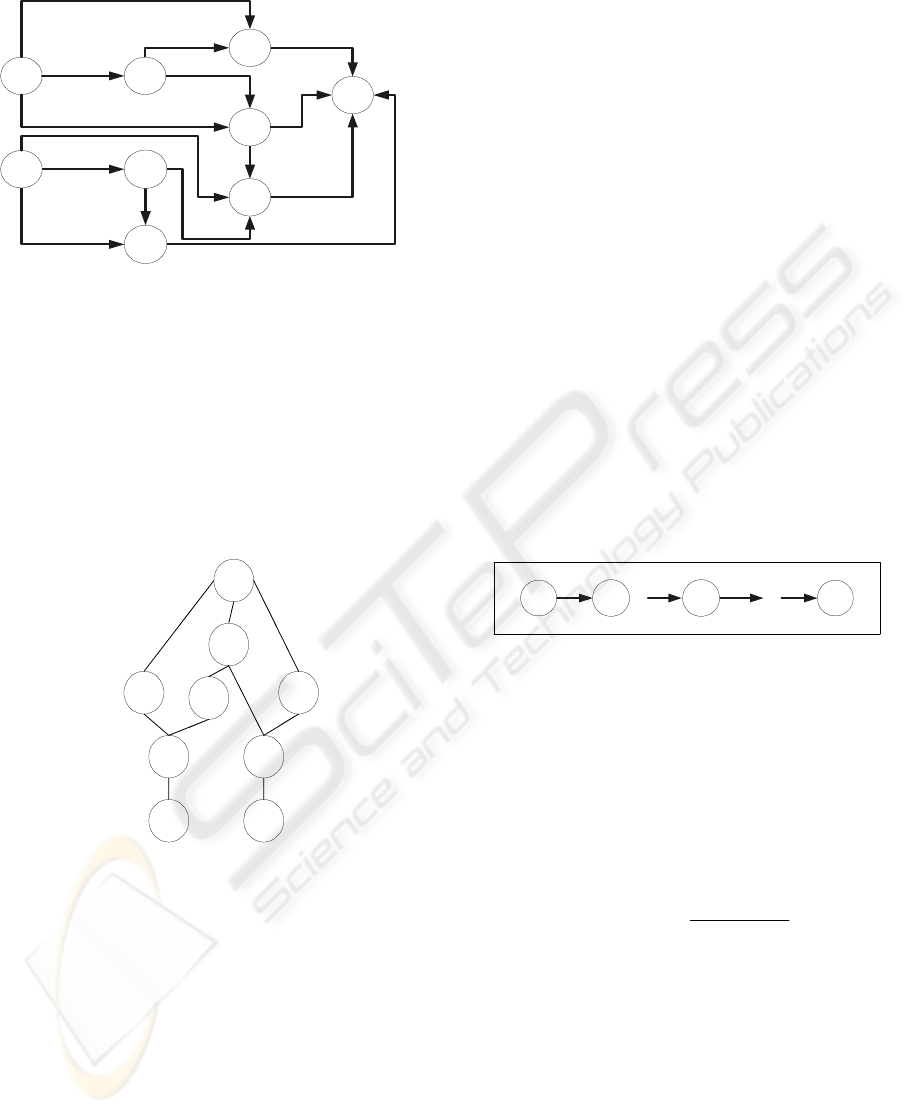
Figure 1: Digraph for an agent consortium.
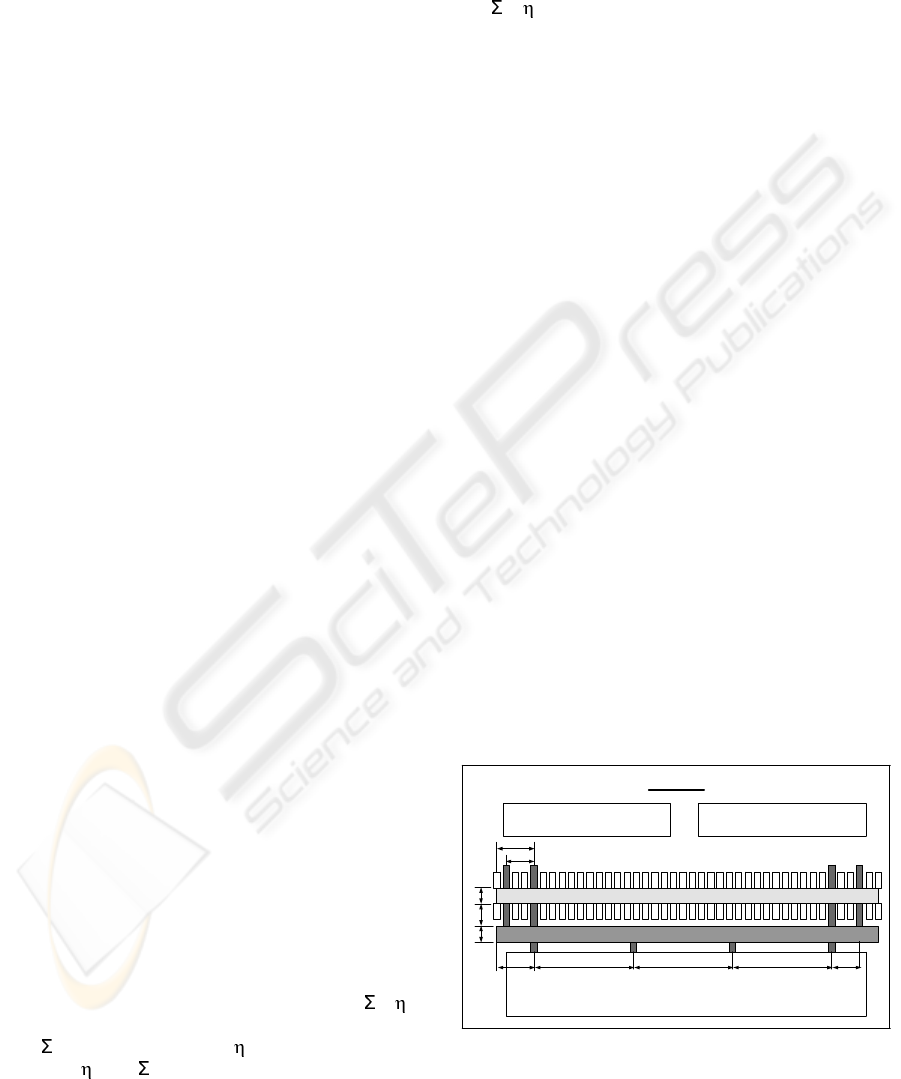
The digraph representing the agent consortium
can be further transformed to an upward drawing,
which is called the Hasse diagram in order to show
the workflow dependencies. Figure 2 shows the
Hasse diagram that is converted from digraph in
Figure 1.
Based on the Hasse diagram constructed for the
agent consortium digraph, the topological sorting of
the agent members can be generated for the above
case: {P1, P3, P2, P4, P6, P7, P5, P8, P9}.
Figure 2: A Hasse diagram for the agent consortium.
In the above case, the poset can be further
divided into five logical groups: G
1
: {P1, P3}, G
2
:
{P2, P4}, G
3
: {P5, P6, P7}, G
4
: {P8} and G
5
{P9}.
Hence, the sequential relationship can be set up
among the logical groups. The concurrent and
redundant relationship can be set up among the
agents in each group.
The following procedure shows the algorithm to
form the logical groups for a consortium.
; Logical Grouping for Hasse Diagram
proc LG(S:finite poset)
k:=1;
while S<>Ф
begin
G
k
:= set of minimal element of S
S: = S – G
k
k:= k +1
end
endproc
Definition for minimal element: Let <A,
≤ > be
a poset, where
≤ represents an arbitrary partial
order. Then an element b ∈ A is a minimal element
of A if there is no element a ∈ A that satisfies a
≤
b.
2.2 Performance and Cost for
Manufacturing Execution
In the proposed framework, four performance
indicators are defined for the PCME model: time for
process, resource cost, system reliability and process
throughput. Three fundamental structures are
defined as the foundation for the PCME model: the
sequential structure, the concurrent structure and the
redundant structure.
Figure 3 shows the sequential structure in the
PCME model. PCME calculation formulas are
shown in (1) – (4).
Figure 3: PCME for sequential structure.
Time for Process = (1)
Resource Cost = (2)
System Reliability = (3)
Process Throughput = (4)
In (4),
u
is the maximum number of units that
can be processed within the timeframe T.
Where 1 <
u
< n and T =
Figure 4 shows the concurrent structure in the
PCME model. PCME calculation formulas are
shown in (5) – (8).
P1 P2
P3 P4
P6
P7
P8
P9
P5
P1
P2
P3
P5
P9
P7
P8
P6
P4
G1 G2 GnGi
...... ......
∑
=
n
i
GT
1
i
)(
∑
=
n
i
i
GC
1
)(
∏
=
n
i
i
GR
1
)(
∑
=
n
i
i
GT
u
1
)(
∑
=
n
i
i
GT
1
)(
DYNAMIC NEGOTIATION FOR REAL-TIME MANUFACTURING EXECUTION
323

Figure 4: PCME for concurrent structure.
Time for Process=Max{T(A
i
)}(i∈{1,2,…m})(5)
Resource Cost = (6)
System Reliability = (7)
Process Throughput = (8)
Figure 5 shows the redundant structure in the
PCME model. PCME calculation formulas are
shown in (9) – (13).
Figure 5: PCME for redundant structure.
Time for Process=Min{T(A
i
)}(i∈{1,2,…p}) (9)
Resource Cost = Max{C(A
i
)} i∈{1,2,…p}) (10)
System Reliability = 1 – (11)
Where F(A
i
) = 1 – R(A
i
) (12)
Process Throughput = (13)
2.3 Performance Level for Equipment
Execution
For individual equipment, the performance level for
equipment execution can be measured by the
extended and enhanced quality of service (QoS)
concept for the manufacturing execution, which was
introduced by Wong et al. (Wong, 2003). The
performance levels will be taken as negotiation
objects in the agent negotiation for the low-level
equipment execution. The formula to calculate the
performance level is shown in (14).
PL(t) = (14)
Where
PL(t) = the performance level at time t
)(tpi = points for the award or the penalty for i
th
factor at time t
ω
i
= coefficients for i
th
factor
N = number of the award and the penalty factors
3 NEGOTIATION PROCESSES
The proposed dynamic negotiation can be viewed as
distributed search in the space of PCME as well as
performance levels of manufacturing execution
(Jennings, 2001). The negotiation objects are the
performance indicators defined in the PCME model
as well as capabilities of the equipment. A decision-
making model of agents is designed in two levels: at
the consortium level, it will follow the cooperative
negotiation approach, and at logical group level, it
will follow the self-interested negotiation approach.
3.1 Cooperative Negotiation
Approach
Every job generated in the autonomous
manufacturing system is associated with a contract.
Contract negotiation (Mathieu, 2002) is carried out
by a group of agents that perform specific tasks at
different stages of the whole contract in a dynamic
environment with common resources. Depending on
its position in the consortium, each agent may
assume the dual roles of being an initiator and a
consortium member. The agent members in the
consortium collectively issue a bid using the PCME-
based reasoning and the contract will be granted to
one of the consortia with the best PCME results.
A1
A2
Am
......
X
Y
∑
=
m
i
i
AC
1
)(
∏
=
m
i
i
AR
1
)(
)}({ iATMax
m
N
tp i
N
i
i
) )((
1
ω
∑
=
×
∏
=
p
i
i
AF
1
)(
)}({
1
iATMin
A1
A2
Ap
......
X
Y
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
324
A 6-tuple M = (J, I
0
, G, f, C, A) is defined for the
modelling of the consortium, where J is a set of job
contracts, G is goal of contract, I
0
∈A is initial agent,
A is set of all agents, C⊆A is consortium and f: J ×
I
0
× G Æ C. This model is the basis to dynamically
generate feasible consortia.
The maximum four-round negotiation strategies
are defined for the framework at the consortium
level. The negotiation search space in the next round
will be smaller if the negotiation is not resolved in
the current round.
Strategies for the 1
st
round negotiation: To
negotiate over the time for process in PCME model
and form a set of consortia in terms of Hasse
diagrams. Go to the 2
nd
round negotiation if more
than one consortium is formed, or reach contract
agreement and go to the group level negotiation.
Strategies for the 2
nd
round negotiation: To
negotiate over the cost in PCME model among the
set of consortia in the 1
st
round negotiation and form
a subset of consortia in terms of Hasse diagrams.
Go to the 3
rd
round negotiation if more than one
consortium is formed, or reach contract agreement
and go to the group level negotiation.
Strategies for the 3
rd
round negotiation: To
negotiate over the reliability in PCME model among
the set of consortia in the 2
nd
round negotiation and
form a subset of consortia in terms of Hasse
diagrams. Go to the 4
th
round negotiation if more
than one consortium is formed, or reach contract
agreement and go to the group level negotiation.
Strategies for the 4
th
round negotiation: To
negotiate over process the throughput in PCME
model among the set of consortia in the 3
rd
round
negotiation and form a subset of consortia in terms
of Hasse diagrams. Reach contract agreement and
go to the group level negotiation.
3.2 Self-Interested Negotiation
Once contract agreement is reached and the job is
granted, agents in the consortium will negotiate
internally by their own interests for tasks of the job.
The negotiation objects are based on the
performance level each agent can provide.
Individual agent negotiates over performance level
to reach agreement for task execution. As the result,
one agent may join multiple consortia and hold more
than one job at certain point of time.
The finite state automaton (FSA) can represent
the operation model of the agent. Let A = (Y,
, ,
y
0,
Y
m
) be a 5-tuple, where Y is the set of equipment
states,
is the set of actions, is the set of process
transitions (
: Y × * Æ Y), q
0
is the initial state of
the equipment and Y
m
⊆ Y is the set of final
equipment status.
3.3 Enforcement and Re-negotiation
In practice, the actions of the agents always have a
temporal extent. The FSA can be extended to a 7-
tuple timed automaton (Alur & Dill, 1994): TA =
(Y,
, , y
0
, Y
m,
X, D) where X is a finite set of
clocks and D is set of other data structures.
Timed action should have some checkpoints and
intermediate effects could be incorporated with the
agent state at these checkpoints. The temporal logic
is used to describe the time constraint of the actions
(Subrahmanian, 2000; Collins, 2002; Dix, 2001).
The goal of job is verified upon state changes of
the timed automaton. If the goal is not met after
certain stage, the agent will try for the goal recovery
by re-negotiation within the same cluster, which is
represented by a redundant structure. Another agent
in the same cluster will take the enforcement action.
4 IMPLEMENTATION AND
RESULTS
Current research project used an ASRS environment
as the test platform. It integrates with assembly
lines, packing areas, kitting areas and
incoming/outgoing interfaces. Figure 6 shows the
layout of one level of the entire ASRS architecture.
PCME specifications and performance levels are
defined for each category of the automated
equipment such as Rail Guided Vehicle (RGV) and
Stacker Crane (SC). The following performance
level specifications are defined and used as
parameters for the negotiation strategies: job
execution priority, number of jobs on hold, position
on storage, distance and congestion.
The Java agent development framework (JADE)
was used as development toolkit for the test.
Figure 6: Level 1 of ASRS test environment
We used 30, 60 and 90 pallets for different test
loadings. The test results are shown in table 1.
Level 1
0
1
0
2
0
3
Stacker Cranes 1 & 2
0
4
0
5
0
6
0
7
0
8
0
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
3
3
3
4
3
5
3
6
3
7
3
8
3
9
4
0
4
1
4
2
0
1
0
2
0
3
0
4
0
5
0
6
0
7
0
8
0
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
3
3
3
4
3
5
3
6
3
7
3
8
3
9
4
0
4
1
4
2
RGV 1 & 2
Kitting Area
Incoming Truck Dock Area Outgoing Truck Dock Area
4.5m
6.0 m
6.0 m 16.0 m 16.0 m 16.0 m 4.5m
2.1m2.1m 3.6m
DYNAMIC NEGOTIATION FOR REAL-TIME MANUFACTURING EXECUTION
325
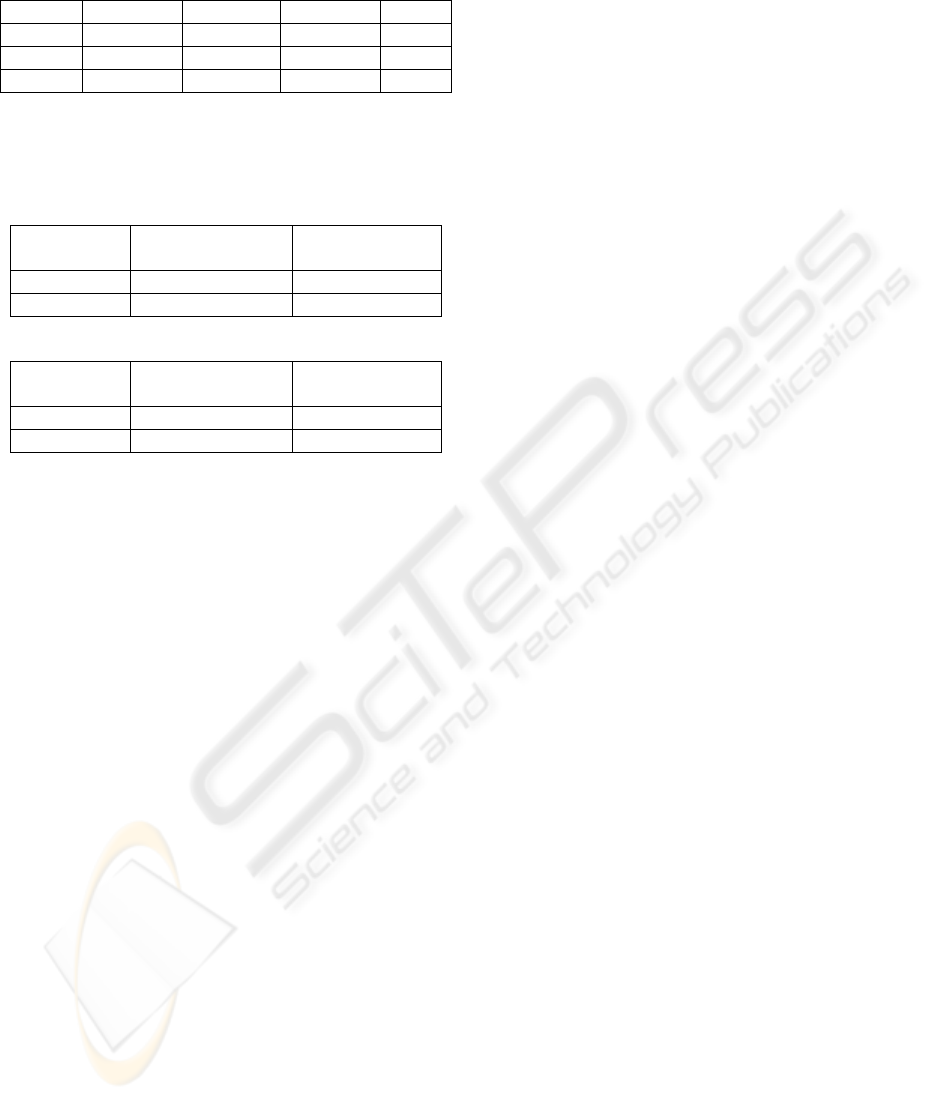
Table 1: Result for number of negotiation rounds.
Pallets 2-round 3-round 4-round >4
30 86.7% 13.3% 0% 0%
60 66.7% 26.7% 6.6% 0%
90 53.3% 28.9% 11.1% 6.7%
The average time spent on negotiation is shown
in table 2. The average time spent on handling is
shown in table 3.
Table 2: Result for average negotiation time.
Initiator Negotiation
Time (Old)
Negotiation
Time (New)
RGV 6.36 (seconds) 3.12 (seconds)
Stacker Crane
8.22 (seconds) 3.68 (seconds)
Table 3: Result for average handling time.
Initiator Handling
Time (Old)
Handling
Time (New)
RGV 56.76 (seconds) 43.32 (seconds)
Stacker Crane
68.92 (seconds) 48.90 (seconds)
5 CONCLUSION
This paper presents a PCME-based dynamic
negotiation approach that is particularly applicable
to the distributed manufacturing system, which is
dynamic and time-critical in nature. The research
work uses a real-time multi-equipment material
handling system as a test platform. This system is
time-critical in operation and therefore, requires an
adaptive, fast and efficient decision-making
mechanism.
The approach discussed in this paper adopts the
strategy of balancing of the cooperative negotiation
and the self-interested negotiation. It also effectively
sets the boundary of negotiation and reduces the
rounds of negotiation through the use of PCME as
the assessment criteria.
The dynamic negotiation approach has been
applied in the execution control of an ASRS system.
The results of the experiments show that this
approach is sufficiently efficient and has achieved
higher percentage of goal attaining in terms of
average task execution time.
A test model with more sophisticated
environment is being built for the future research
work.
REFERENCES
Sargent, P., 1992. Back to school for a brand new ABC. In
The Gauardian.
Shen, W.M. and Norrie, D.H., D.H., 1999. Agent-Based
Systems for Intelligent Manufacturing: A State-of-the-
Art Survey. In International Journal of Knowledge
and Information System. Vol. 1(2), pp. 129-156.
Deen, S.M., 2003. Agent-based Manufacturing, Springer
Verlag. Heidelberg, 1
st
edition.
Odell, J.J., 2002. Agent-Based Manufacturing: A Case
Study. In Journal of Object Technology. Vol. 1(5), pp.
51-61.
Jennings, N.R., 2003. Agent-Based Control Systems. In
IEEE Control System Magazine. Vol. 23(3), pp. 61-74
Fatima, S.S. and Wooldridge, M., 2001. Adaptive Task
and Resource Allocation in Multi-Agent Systems. In
the fifth International Conference on Autonomous
Agents.
Dias, M.B., 2002. Opportunistic Optimization for Market-
Based Multirobot Control. In IROS2002, International
Conference on Intelligent Robots and Systems.
Ng, B.T.J., Zhang, J.B., Lin, W.J., Wong, M.M., Luo, M.
and Ma, H., 2003. Fast Self-Organizing Holonic Based
Multi-Equipment Control. In ICCA’03, the Fourth
International Conference on Control and Automation.
Jennings, N.R., Faratin, P., Lomuscio, A.R., Parsons, S.,
Sierra, C., and Wooldridge, M., 2001. Automated
negotiation: prospects, methods and challenges. In
International Journal of Group Decision and
Negotiation. Vol. 10(2), pp. 199-215.
Wong, M.M., Zhang, J.B., Tang, Y., Zhuang, L.Q., 2003.
A QoS-aware Dynamic Transfer Order Optimisation
Methodology for Automated Material-handling
Systems. In ICCA’03, the Fourth International
Conference on Control and Automation.
Mathieu, P., and Verrons, M.H., 2002. A genetic model
for contract negotiation. In AISB2002, Artificial
Intelligence and the Simulation Behaviour.
Alur, R., and Dill, D., 1994. Automata for Modelling
Real-time Systems. In Theoretical Computer Science.
Vol. 126(2), pp. 183-236.
Subrahmanian, V.S., Bonatti, P., Dix, J., Eiter, T., Kraus,
S., and Ozman, F., 2000. Heterogeneous Agent
Systems. MIT Press, Boston 1
st
edition.
Collins, J., Ketter, W., and Gini, M., 2002. A Multi-agent
Negotiation Testbed for Contracting Tasks with
Temporal and Precedence Constraints. In
International Journal of Electronic Commerce. Vol.
7(1), pp. 35-57.
Dix, J., Kraus, S., and Subrahmanian, V.S., 2001.
Temporal Agent Programs. In Artificial Intelligence
Journal. Vol. 127(1), pp. 87-135.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
326
