
On Uncertainty in Context-Aware Computing:
Appealing to High-Level and Same-Level Context for
Low-Level Context Verification
1
Amir Padovitz, Seng Wai Loke, Arkady Zaslavsky
School of Computer Science and Software Engineering, Monash University,
Caulfield East, VIC 3145, Australia
Abstract. There is an inherent chasm between the real-world and the world that
can be perceived by computer systems, yielding uncertainty and ambiguity in
system perceived context, with consequent effect on the performance of con-
text-aware systems. While the problem is complex in depth and breadth, we
explore an approach where context is characterized at different levels of ab-
straction, and where contextual information at high-levels of abstraction and
sensed context at low-levels of abstraction can be used to validate and correct
low-level sensed context such as location. We describe a randomly generated
simulation of locations that might be sensed by a positioning technology, and
how our approach can be used to validate and correct the sensed locations.
1 Introduction
One of the main challenges in pervasive and context-aware computing is the abil-
ity to handle uncertainties that emerge when systems try to become aware at runtime
to desirable situations and are indecisive in reasoning about the true situation [1, 2,
10, 11].
We observe three factors that promote context uncertainty and highlight the need
for context verification. The first is unsatisfactory combination of attribute types
(either virtual or physical) [3] to infer a desired context, which results in low confi-
dence in the inferred context – this may be the result of cost efficiency considerations.
The second is an intrinsic ambiguity between two or more situations that impedes a
straightforward reasoning about the correct context - this is often the case when two
different situations are characterized by similar attribute values. If such ambiguous
context states are comparable and context-states form a continuous function as values
vary, it is possible to perform adaptation based on the fuzzy nature of the situation [6]
rather than actually validating the true situation. However, in many cases two or more
situations may be ambiguous and share a fuzzy region of attribute values but will not
be comparable with respect to the specific application [7] or would enforce a different
or opposite rule when they are inferred [5]. The third factor and focus of this paper is
the often inherent inaccuracy and unreliability of many types of low-level sensors,
1
We thank HP Labs and HP Australia for sponsorship of this work.
Padovitz A., Wai Loke S. and Zaslavsky A. (2004).
On Uncertainty in Context-Aware Computing: Appealing to High-Level and Same-Level Context for Low-Level Context Verification.
In Proceedings of the 1st International Workshop on Ubiquitous Computing, pages 62-72
DOI: 10.5220/0002664600620072
Copyright
c
SciTePress

which may lead to contradicting or substantially different reasoning about context.
When faced with contradicting sensorial data from two similar sensors, a context-
aware system needs to resolve these discrepancies as well as high-level context ambi-
guities that result from the contradicting sensor readings.
Often, context verification is only a matter of optimizing and utilizing already ex-
isting context-reasoning techniques, which are perhaps not employed due to system
constraints such as time costs or available resources. Verification of low-level context
(e.g. ‘light in room’ or ‘high noise level’) is an exception, as the context is solely
dependent on readings of a specific sensor. The accuracy of the sensor determines the
quality of the context inferred.
We suggest a general high-level, logical approach that makes use of existing con-
text reasoning and acquisition techniques that enables a context-aware system to
resolve context ambiguities and optimize sensor-reading values. Our approach is the
following: in order to verify a given sensor reading (i.e. low-level contextual informa-
tion) such as location or light, we use other sensor readings and inferences upon such
sensor readings.
2 Logical Verification
The central scheme in a logical verification of context is the ability to resort to
other context information that would help us judge sensor attribute values. The verifi-
cation process assumes the correctness of a specific possibility and determines its
probability according to other contextual information; it then switches and assumes
the correctness of other possibilities and assigns a probability to each as well. Finally,
it selects the most probable alternative. Suppose for example that two identical light
sensors in a room yield opposite readings; the first indicates the light is on and the
other indicates the light is off. By resorting to other elements, such as the time of day
or motion in the room or computing or other activities currently held in the room, the
system can assign probabilities to both readings and select the most probable. Sup-
pose that a person is detected to be located in two places at the same time by observ-
ing two similar location detector devices (e.g. his PDA location vs. his electronic
badge location); the system then resorts to other contextual parameters, which indi-
cate the more probable location value.
We first observe different levels of abstraction in context and in particular distin-
guish between context that can be obtained directly by observing low-level attribute
values/sensor readings (e.g. temperature or location), and more abstract higher level
context, which is inferred by a collection of low-level attributes values (e.g. ‘In a
meeting’ or ‘Sleeping’). We argue that often more abstract contextual situations can
assist in verifying sensor reading values or low-level contextual states. Following the
logical verification scheme, we first assume correctness of a specific attribute value
V
i
a of an attribute type
i
a and then search for a more abstract contextual situation
j
C that is made up of several attributes, including the attribute we are trying to verify
63

(denoted by ),...,...,,(
21 nij
aaaaC = ). We then observe how well the assumed
attribute value corresponds to that contextual situation in the current system state (i.e.
having current specific values for the other attributes), which yields
)|(
V
ij
aCP -
the probability of currently having the contextual situation assuming a specific value
for the ambiguous attribute. We repeat the process for each alternative value for the
ambiguous attribute and compare the probabilities associated with each of the values.
3 Experimental Evaluation
The need to verify low level context (i.e. sensor readings) is not only required
when two or more similar sensors yield different or contradicting results, but is useful
when pervasive systems deal with sensors that are inherently inaccurate. Examples of
such inaccuracies can be found in Global Positioning Systems (GPS), which may
vary in accuracy between 0.0l meters and 15 meters [13, 4, 9] or indoor positioning
mechanisms [12, 4, 9] whose accuracy depends on the number and proximity of wire-
less access points. Minimizing inferred location errors takes high importance when
relatively short distances imply totally different context for context-aware systems,
such as in the case of different contextual interpretations for different spaces in a
building [11]. For example, the context of ‘Subject in a Meeting’ is completely dif-
ferent from the context of ‘Subject in Lunch’, even though some locations in the
meeting room and the dining room are in close proximity, and are only separated by a
thin wall.
The approach of verifying low-level context attributes by logically resorting to
higher level contextual situations is also applicable in correcting (or what we term
filtering) the sensor readings errors. By estimating a maximal deviation of an attrib-
ute value from its true value, we can assume different attribute’s sensed values and
resort to other situations to estimate whether such situations combined with the ad-
justed attribute’s value are more probable.
We make use of this approach and present a system prototype that filters sensed
location readings according to a logical scheme using high-level contextual situations.
We also present a simulation, used for critically assessing the logical filtering ap-
proach.
The system prototype uses a simple inference mechanism which identifies a cur-
rent situation by the manifestation of the current context-state within a specific situa-
tion [7, 8]. It also has knowledge on predefined location descriptions that are identi-
fied as possibly valid locations for sensed location readings (even with no attached
situations).
The main scheme behind the logical location filtering is the assumption that the
observed sensed attribute is inaccurate and therefore it is sensible to resort to other
contextual parameters that can help minimize the incurred error of the observed
value. As described in section 2, the system looks for helpful information by examin-
ing the probability of having other situations that are inferred using multiple attributes
including the location attribute.
64
For example, consider a case in which no meaningful high-level context can be in-
ferred from the combination of the currently sensed location reading and values of
other contextual attributes (assuming here that we have a set of rules which map
combinations of sensed attribute values, i.e., low-level context information, to high-
level context) – whereas from a combination of the current location reading but
slightly modified and values for the other contextual (non-location) attributes, we can
infer a specific high-level context with high confidence. In such circumstances, it may
be sensible to assume that the location reading was inaccurate and should be ad-
justed.. The magnitude of the adjustment from the original readings may also influ-
ence such decisions, as it can be assumed that errors follow a Normal distribution.
Therefore, the greater the magnitude of the adjustment, the greater the error (or devia-
tion from the true location) is assumed, and the less likely such an error would have
taken place.
The main procedure for the logical verification used by the system prototype is
presented in figure 2.
1. if sensor readings and context-state correspond to same context-space (current
active context) then:
Î
Return sensor readings.
2. Adjust location parameters within acceptable error boundaries:
2.1 if location found in current active context and if passed probability
distance test then:
Î
Return adjusted location, which has minimal distance to the original
sensor readings.
2.2 if location found in other context spaces but not in current active
context-space:
A
Å
location with minimal distance to any of the context spaces.
// reached here if no current active context found in acceptable error distance
3. if original sensor readings are not in a valid location, then force change in
location, by
Æ
Return minimal distance to any valid area.
// reached here if original location is in a valid area
4
Î
Return A .
Fig. 2. Logical verification procedure
The procedure distinguishes between three possible situations, namely when the
original readings already lead to an inferred high-level context, when the readings do
not lead to an inferred high-level context but are in a valid area (e.g., not indicating
that the position of the person is inside a brick wall), and when the readings are out-
side any valid area description. In the last case, the system immediately adjusts the
estimated location (as the current one is unquestionably wrong – e.g., the user can’t
be inside a brick wall, at least not typically!), even though such modifications may
possibly mean that the original location reading was highly in error.
65

In the current implementation, the prototype handles two-dimensional information
and modifies location values assuming a maximal error reading of five meters in both
horizontal and vertical axes. The prototype assumes Normal distribution of the loca-
tion reading error and for simplicity estimates a discrete pseudo-Normal distribution
function for every meter unit of error.
3.1 Simulation and Analysis
We assess the characteristics of the logical filtering with a simulation of a context-
aware system that makes use of location positioning system as part of its context
inference. We make use of the logical filtering mechanism to judge the location read-
ings and correct the inherent location sensing errors. The following experiment ob-
serves a simulated subject’s pseudo-random (where randomness is computer gener-
ated) activity in terms of its location and high-level contextual situations the subject is
locally participating in. It examines a simple floor plan consisting of a meeting room,
dining room, the subject office and a corridor, and provides information to the logical
filtering mechanism to identify the following contextual situations: ‘Subject in of-
fice’, ‘Subject in lunch’ and ‘Subject in a meeting’. We make use of the following
attributes for reasoning about context: ‘location’, ‘office computing activity’, ‘office
door status’, ‘time’, ‘subject scheduled meetings’, ‘motion detected in area x’ and
‘light sensed in area x’. The basic experiment’s floor plan is illustrated in figure 3,
and can be easily extended into more complex plans by defining more areas, valid
locations and contextual situations and applying these to the same filtering mecha-
nism. We also allow a degree of unpredictability by occasionally disproving the ap-
plicability of a specific current context state even though it can be inferred by the
system. For example, if a subject is in the dining room, at lunchtime, having no par-
ticular scheduled meeting for that time, he may occasionally be only accompanying a
friend than having lunch himself.
66
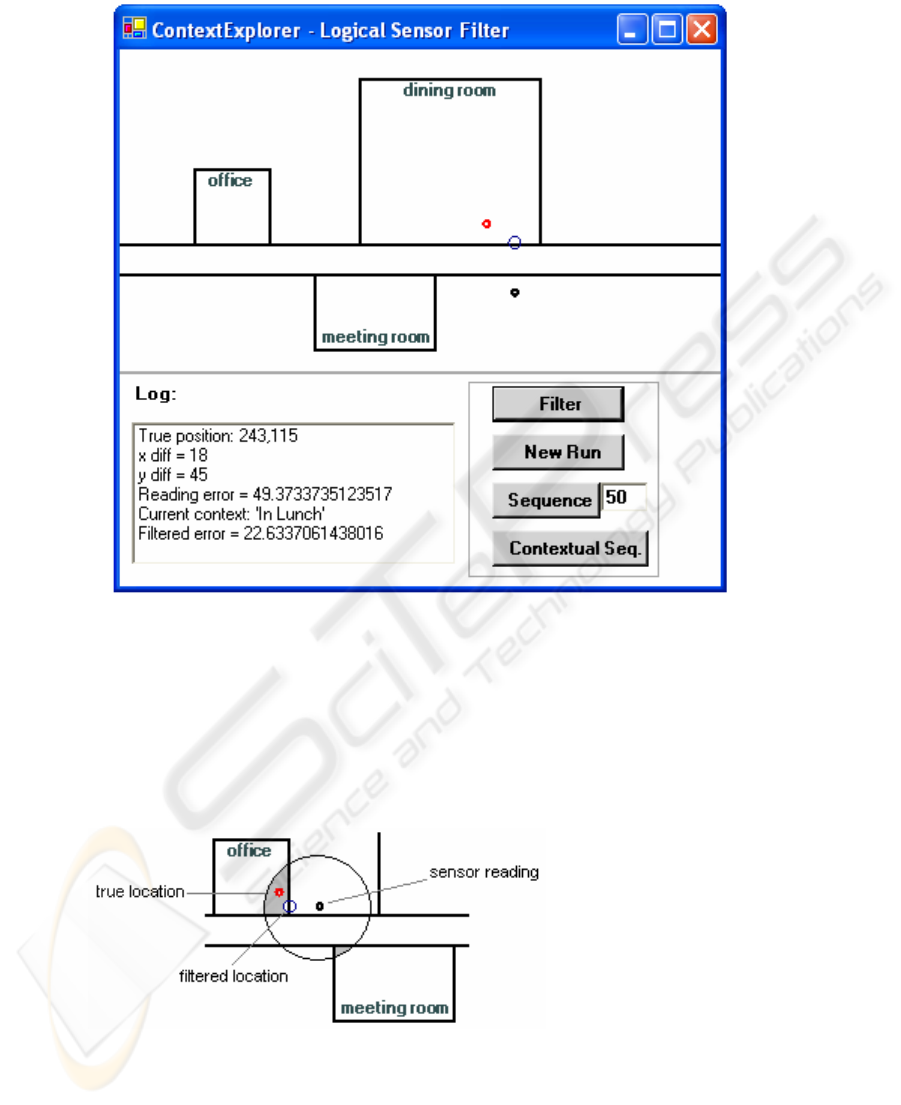
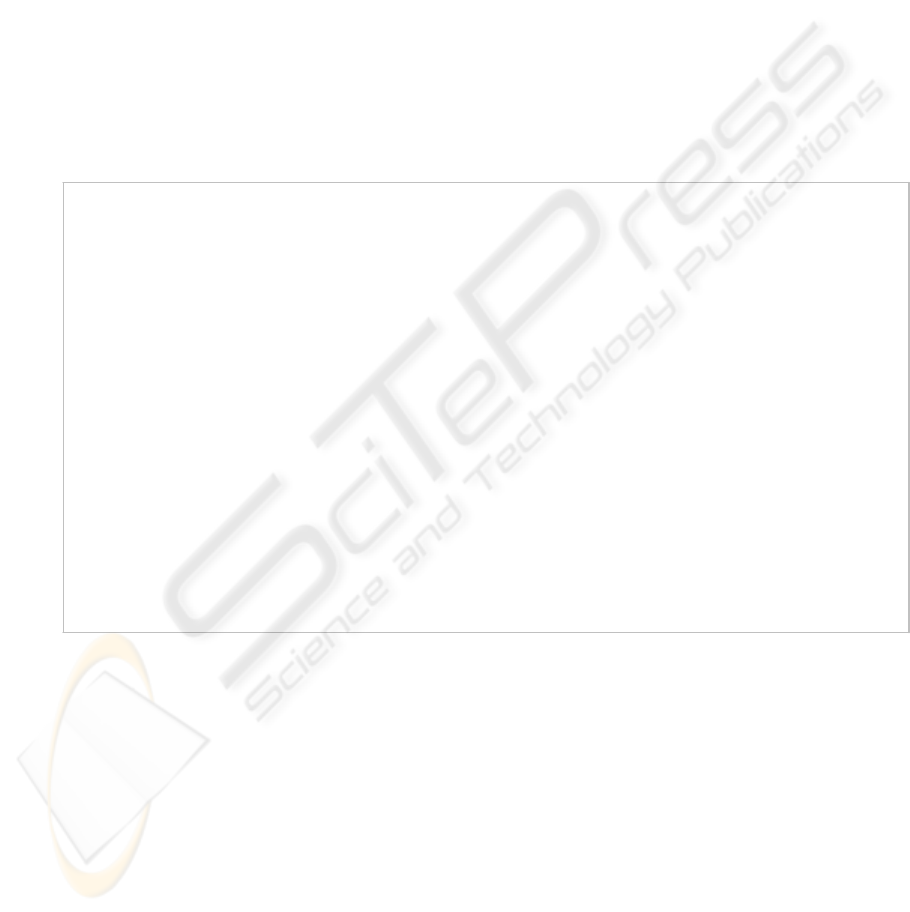
Fig. 3. Basic experiment floor plan
The three circles in the floor plan represent: the actual true subject’s location – de-
noted by the red circle, the sensed location reading – denoted by the black circle and
the new location estimation after logical filtering procedure – denoted by the thinner
and wider blue circle.
We will now go through the actions of the logical filter for a typical scenario,
which is illustrated in figure 4.
Fig. 4. Typical scenario illustration
67
The logical filtering procedure starts by receiving the sensor reading location, without
knowing the actual true location. It then checks the probability of being in that spe-
cific location. For example, it tries to match this location with permissible positions of
any of the predefined known situations. In the example of figure 4, the sensor reading
location is actually outside any valid area in the floor plan. This location does not
match any location definition for any known situation and is evidently wrong. Next,
after assuming an error in the location reading, the procedure iterates on other possi-
ble positions for the true location, based on the maximal error distance it assumes
(around 7 meters in this experiment). The large circle in figure 4, having the sensor
reading in its center, denotes the area for the iteration process. At every iteration the
procedure assumes the correctness of a new position within the large circle and
checks if the current assumed position corresponds to some predefined contextual
situation and if so, it checks whether this particular contextual situation is currently
active. In our example, two areas correspond to known contextual situations, the
shaded areas in the office and in the meeting room, corresponding to two possible
high-level contextual situations the user could be in: ‘subject in office’ and ‘subject in
a meeting’. The procedure checks which one of these situations is probable and if
more than one is probable, which is the most probable. The ‘subject in a meeting’
situation does not seem to be active since no light and motion are sensed in the meet-
ing room and no meeting is scheduled for the subject in the current time. The ‘office’
situation is more likely to be currently active, since the office door is not locked; light
is sensed in the office as well as some computing activity. Together with having the
subject location attribute corresponding to a position somewhere in the office, a good
match with the ‘office’ situation is attained. The procedure assigns probabilities to
possible areas while also considering the distance of the area from the sensor reading
(assuming Normal distribution of the error implies less chance to have large distance
errors). It then selects the most probable one if it exceeds a predetermined probability
threshold, and in our case the shaded area in the office. Within this area it selects the
position that is the shortest distance from the original sensor reading, again based on
the Normal distribution assumption.
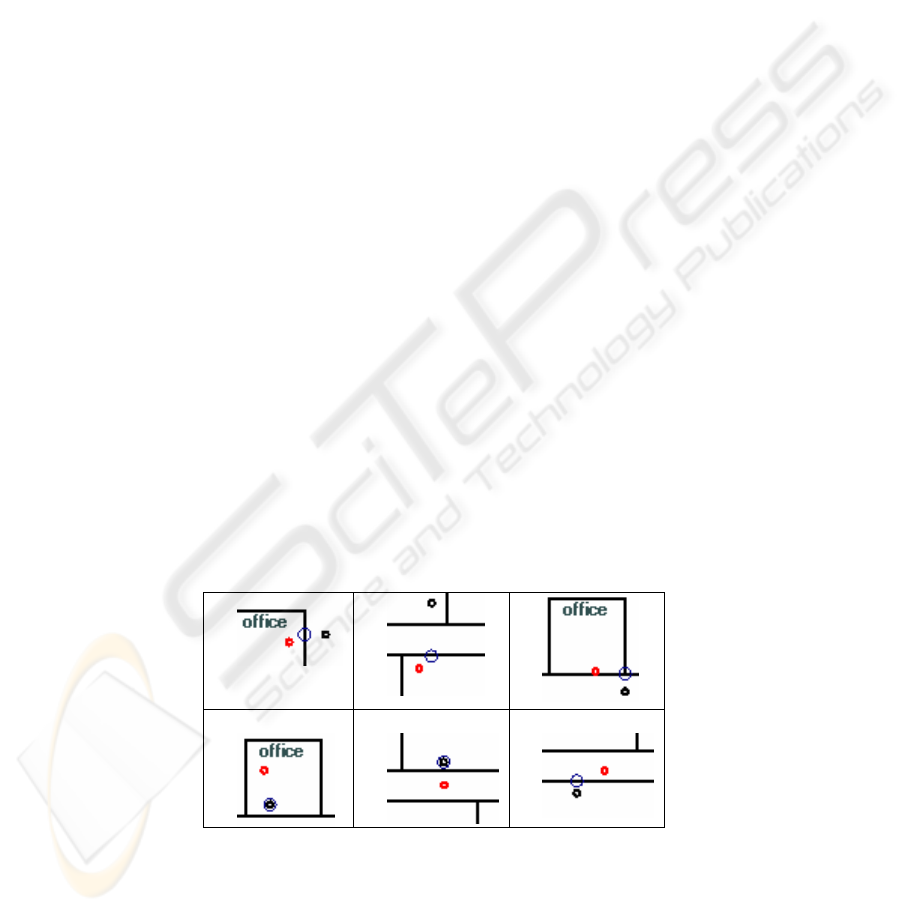
Figure 5 provides a collection of other typical experimental runs handled by the
simulation.
Fig. 5. Example logical filtering scenarios
1
2
A
B
C
68
We observe three typical occurrences in figure 5; the first 3 figures (A1, B1 and C1)
depict tangible filtering effects over the location sensor reading values. In these ex-
amples, the sensor readings are located outside the area of the true high-level context
(e.g. in example
C1 the area of the high-level context is the office box and contains
the subject’s true location). The filtering procedure weighs the feasibility of each
possible high-level contextual situation, each situation as inferred by a different loca-
tion value, as the location values are changed within the acceptable range of values.
As the application is not aware of the true subject’s location (the red circle) it per-
forms the minimal change possible in the estimated location so it would enforce the
new contextual situation while deviating minimally from the sensor reading values.
Examples
A2 and B2 depict situations where no gain is achieved with the logical fil-
tering. In
A2, although the sensed location is different from the true location, it is still
within the currently inferred contextual situation; hence filtering does not provide
additional useful information. In example
B2, the subject’s true location is in the cor-
ridor, which does not conform to any high-level context. The filtering mechanism
cannot find any high-level contextual situation that would fit even when the location
readings are adjusted (within its boundaries), and by default maintains the original
sensor readings.
Example
C2 depicts a situation where the sensor reading values are outside the
valid pre-defined areas. In such cases, even though the subject’s true location does
not conform to any known context, the procedure forces a change towards the closest
valid area.
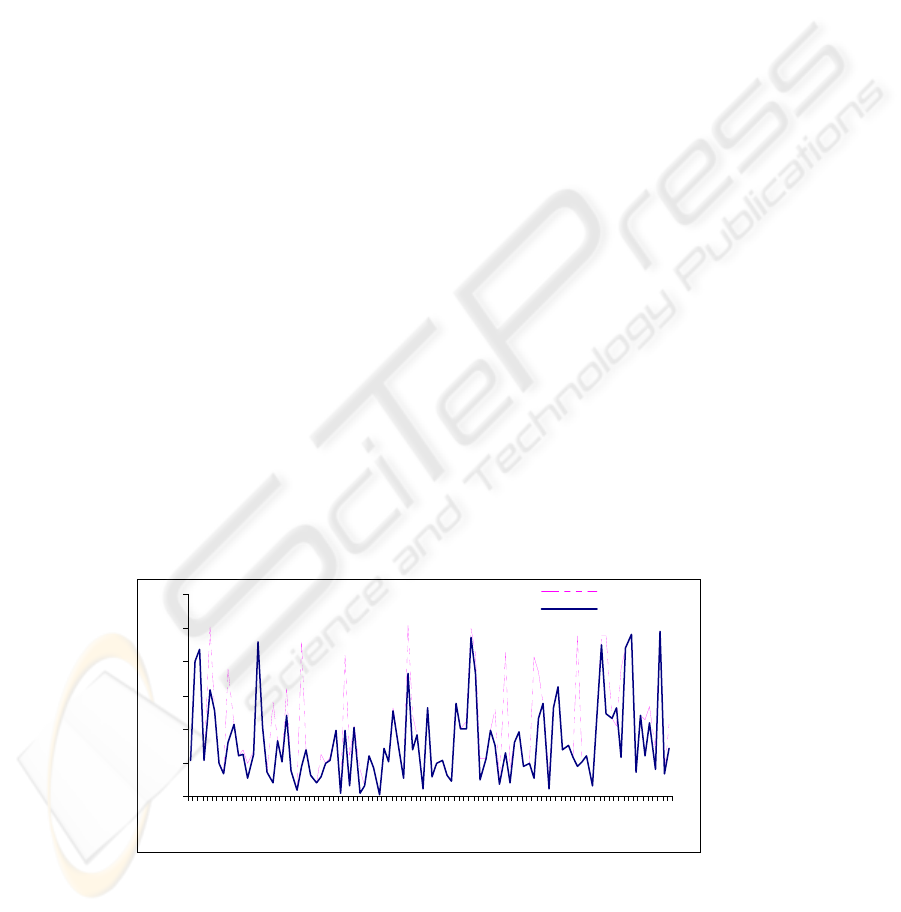
We performed experimental runs to examine the characteristics of logical filtering;
the results are shown in figures 6. We observe a consistent trend of optimization of
the location attribute, having lower error rates after applying logical filtering. Figure
7 shows data produced after 100 runs. Errors are compared to true location by
Euclidean distance between the filtered location and true location, and between the
true location and sensed location.
Fig. 6. Filtering errors vs. sensor reading errors
0
1
2
3
4
5
6
1
8
15
22
29
36
43
50
57
64
71
78
85
92
99
sample size
meters
reading error
filtered error
69
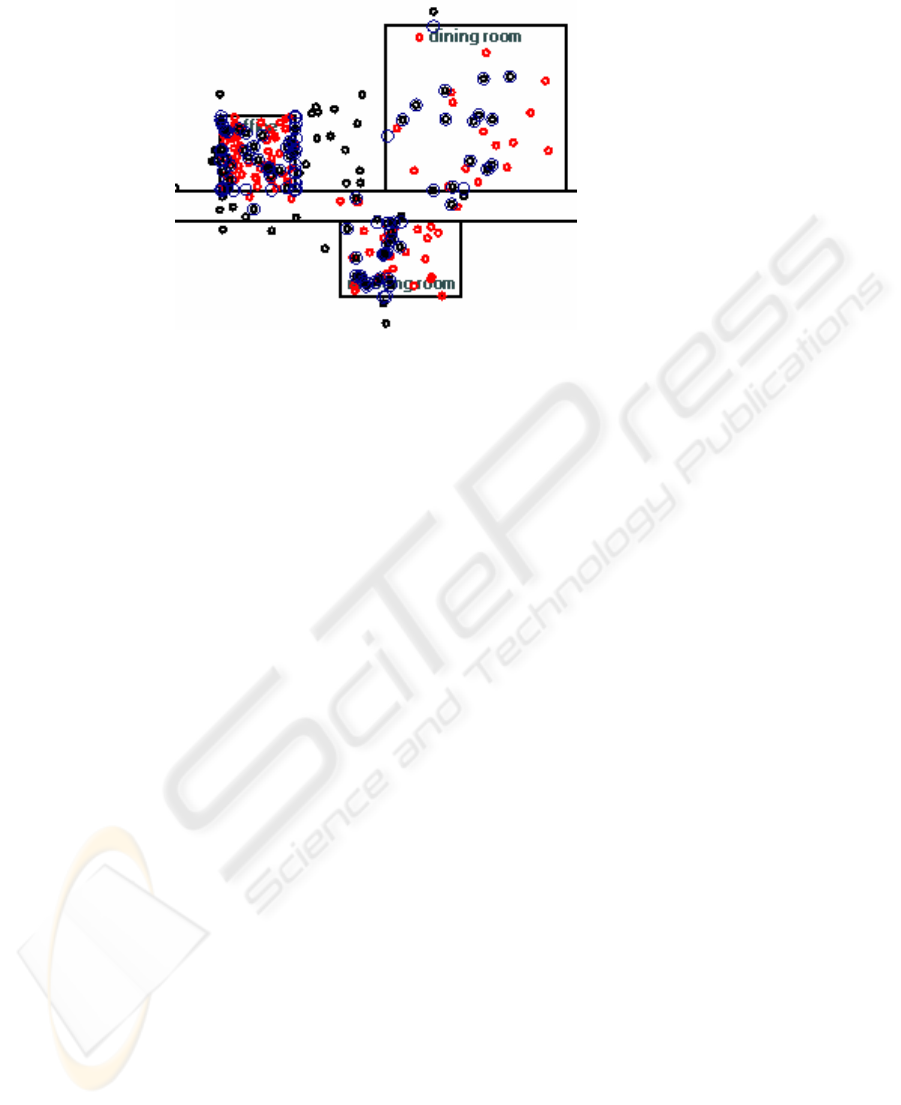
Fig. 7. Accumulated 100 runs
3 Conclusion and Critical Analysis
We have observed clear improvement in average location error after performing
logical filtering for general positioning mechanisms. Although a relatively simple
floor plan was used to demonstrate the impact of logical verification, the procedure
can be extended to more complex and elaborate settings and can be used in a variety
of scenarios concerning other types of low-level attributes. The degree of success of
this approach is nevertheless dependent on the suitability of the system’s contextual
configuration, i.e. to the various predefined high-level contextual situations, the
attributes they are inferred by and the accuracy of the process of reasoning about
context in general.
The ability to reason about context incorrectly, given a false current sensor reading
is in particular hazardous in a logical filtering process as we often assume new esti-
mated locations and the filtering process may be tempted to assign importance to non-
existent but inferred situations. To illustrate the problem, consider the following sce-
nario. A subject is in close proximity to the dining room, say in the corridor, at lunch-
time, with no scheduled meetings. The sensed location turned out to be in a non-valid
area. The logical filtering process assumes different locations by modifying the loca-
tion readings and verifying the new locations with the current non-location attribute
values. It identifies that ‘Subject in lunch’ contextual situation will become possible if
the sensed location was slightly adjusted. It favors this situation and changes the
sensed location values, creating an even greater error. This scenario is illustrated in
figure 8 where no probability considerations were assigned to the possible error dis-
tance, and is arguably a limitation of the basic logical filtering algorithm.
70
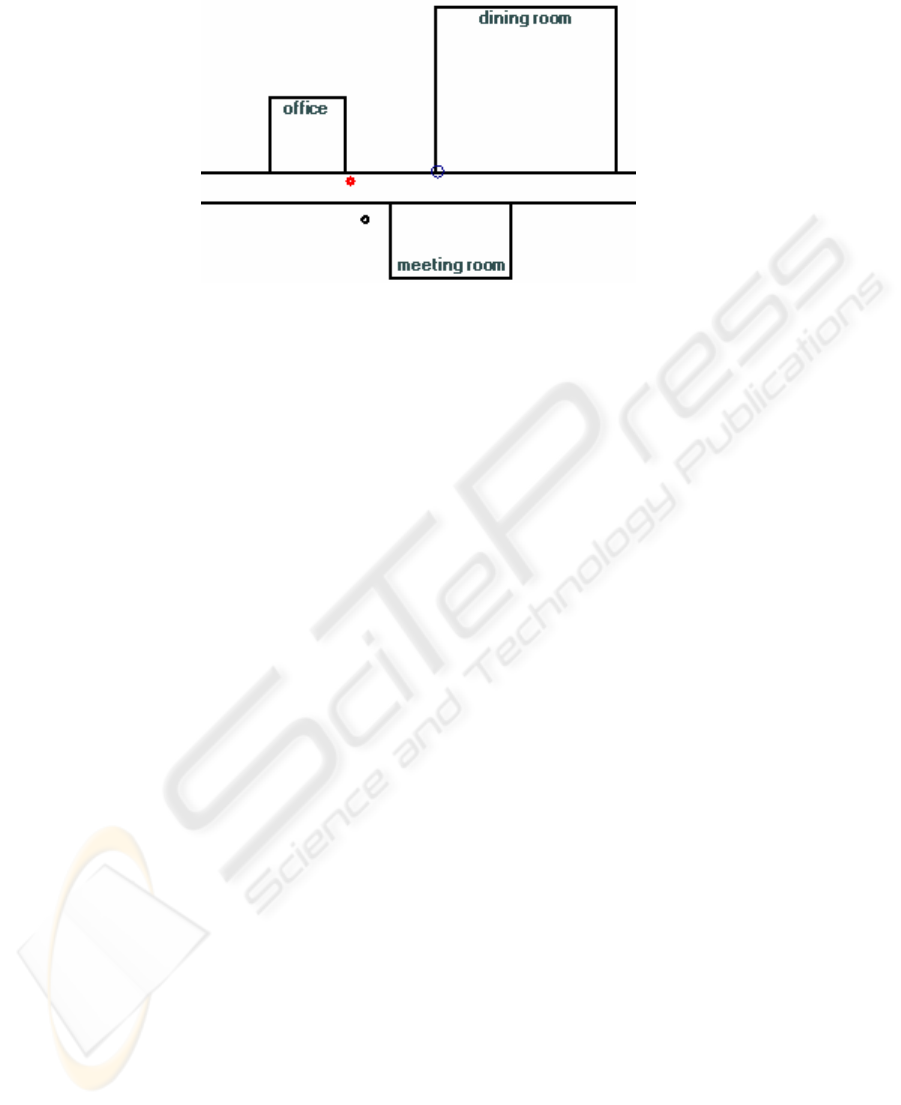
Fig. 8. Increase in error due to logical filtering
The likelihood of such scenarios occurring depends on the capability of having all
attributes values except location denote a specific situation, while in reality, consider-
ing the true location reading, having a different inferred contextual situation. This
scenario can possibly be avoided by a wise selection of attributes that eliminate such
situations. It may also be possible to overcome this scenario by adding more complex
rules to the basic logical filter such as tracing historical events for better inference or
avoiding the proposed value changes if it incurs a great magnitude in distance correc-
tion.
Despite the mentioned limitation, a logical layer that makes use of the system’s
available context reasoning techniques for low-level context verification is evidently
useful and can be used to decrease inherent sensor inaccuracies and resolve contex-
tual ambiguities. As attribute information is obtained by the system in order to infer
contextual situations, the contribution of the logical filter is in effect greater than only
the actual gain from the decrease in the attribute inaccuracy. By applying the logical
filter a significant contextual change occurs; the original sensed value may change
even minimally but in such a way that it would be identified with another more prob-
able contextual situation, consequently assisting the system in performing much bet-
ter context inference. Generalizing from the approach, the use of semantics holds
promise in resolving ambiguities and we believe we have merely touched the tip of
the iceberg of what is possible.
References
1. Bardram J. E., Applications of Context-Aware Computing in Hospital Work – Examples and
Design Principles, In Proceedings of ACM Symposium on Applied Computing (ACM SAC)
2004, ACM Press, 2004
2. Dey A. K., Jennifer Mankoff, Gregory D. Abowd and Scott Carter
Proceedings of the 15th Annual Symposium on User Interface Software and Technology
(UIST 2002), Paris, France, October 28-30, 2002. pp. 121-130.
71

3. Glassey R., Ferguson I., Modeling Location for Pervasive Environments, First UK-UbiNet
Workshop, London, UK, 2003
4. Hightower J., Borriello G., Location systems for ubiquitous computing, IEEE Computer
34(8):57-66, August 2001
5. Huuskonen P., Pavel D., Tuomela U., Context-awareness: A new dimension for communi-
cation, http://www.nokia.com/nokia/0,,33758,00.html
6. Mäntyjärvi J., Seppänen
T., Adapting Applications in Mobile Terminals Using Fuzzy Con-
text Information, Mobile Human-Computer Interaction: 4th International Symposium, Mo-
bile HCI 2002, Pisa, Italy, September 18-20, 2002
7. Padovitz A., Loke S. W., Zaslavsky A., Towards a Theory of Context Spaces, Workshop on
Context Modeling and Reasoning (CoMoRea), at 2nd IEEE International Conference on
Pervasive Computing and Communication (PerCom'04), Orlando, Florida, March 2004.
8. Padovitz A., Zaslavsky A Loke S. W., Burg B., Stability in Context-Aware Pervasive Sys-
tems: A State-Space Modeling Approach, Workshop on Ubiquitous Computing (IWUC
2004) at the 6th International Conference on Enterprise Information Systems (ICEIS 2004),
Porto, Portugal, 2004, accepted for publication
9. Patterson C. A., Muntz R. R., Pancake C. M., Challenges in Location-Aware Computing,
April-June 2003, issue of IEEE Pervasive Computing, available at:
http://dsonline.computer.org/0306/d/bp2spo.htm
10. Satyanarayanan M., Pervasive Computing: Vision and Challenges, IEEE PCM August
2001, pp. 10-17.
11. Satyanarayan M Coping with Uncertainty,., IEEE CS Pervasive computing Journal, August
2001
12. Ekahau Positioning Engine, http://www.ekahau.com
13. GPS Information, available at:
http://www.gpsworld.com, http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
72
