
Performance Guarantee in a New Hybrid Push-Pull Scheduling
Algorithm
Navrati Saxena
1
and Cristina M. Pinotti
2
1
Dept. of Informatics and Telecom., University of Trento, Povo, Trento, Itay,
2
Dept. of Mathematics and Informatics,
University of Perugia, Perugia, Italy
Abstract. The rapid growth of web services has already given birth to a set of
data dissemination applications. Efficient scheduling techniques are necessary to
endow such applications with advanced data processing capability. In this paper
we have effectively combined broadcasting of very popular (push) data and dis-
semination of less popular (pull) data to develop a new hybrid scheduling scheme.
The separation between the push and the pull data is called cut-off point. The
clients send their request to the server, which ignores the request for the push
items but queues the requests for the pull items. At every instance of time, the
item to be broadcast is designated by applying a pure-push scheduling. On the
other hand, the item to be pulled is the one stored in the pull-queue having the
highest number of pending requests. Fixed a value for the cut-off point, an ana-
lytic model, validated by simulation, evaluates the average system performance.
On the top of that, the major novelty of our system lies in its capability of offer-
ing a performance guarantee to the clients. For each request, the client specifies,
along with the data item requested, the maximum interval of time it can afford
to wait before its request will be served. Based on this particular access-time and
on the analytic model, our hybrid system computes the cut-off point to fulfill the
specific need of the client. The system offers a great flexibility for clients. It im-
proves significantly upon a pure push system and some existing hybrid systems
in terms of average waiting time spent by a client.
1 Introduction
Over the past few years, the overwhelming growth of web services has resulted in the
emergence of applications capable of storing and processing a huge set of information.
The prime objective of such data dissemination applications lies in delivering the data to
a very large population of clients with minimum delay. Broadly, all data dissemination
applications have two flavors: in a push-based system the clients continuously monitor
a broadcast process from the server and obtain the data items they require, without
making any requests; on the contrary, in a pull-based system, the clients initiate the
data transfer by sending requests on demand, and the server then makes a schedule to
satisfy these requests. Both push- and pull-based scheduling have their own advantages
and disadvantages. However, neither push nor pull based scheduling alone can achieve
Saxena N. and M. Pinotti C. (2004).
Performance Guarantee in a New Hybrid Push-Pull Scheduling Algorithm.
In Proceedings of the 3rd International Workshop on Wireless Information Systems, pages 50-62
DOI: 10.5220/0002674500500062
Copyright
c
SciTePress

the optimal performance [3], [9]. A better performance could only be achieved when
the two scheduling approaches are combined in an efficient manner.
In this paper, a new, hybrid scheduling is proposed that effectively combines broad-
casting of more popular (push) data and dissemination upon-request for less popular
(pull) data. The clients send their requests to the server, which queues them up for the
pull items. The server continuously broadcasts one push item and disseminates one
pull item. At any instance of time, the item to be broadcast is selected by applying a
pure-push scheduling, while the item to be pulled is the one in the pull-queue having
the maximum number of requests. The cut-off point, that is the separation between the
push and the pull items, is determined in such a way that the clients are served before
the deadline specified at the time of the request. In other words, the major novelty of
our system lies in its capability of offering a performance guarantee to the clients.
Organization of the paper: The rest of the paper is organized as follows: Sec-
tion 2 reviews related works and subsequently highlights the motivations behind using
our new hybrid algorithm. Section 3 presents our basic algorithm and shows by a
suitable queueing model how to evaluate the system performance, that is the average
waiting time expected in the system, when the value K of the cut-off point is known.
Subsequently, simulation results of the system behavior are discussed briefly. Then, in
Section 4, the complete version of our new algorithm with performance guaranteed is
discussed. Finally, Section 5 concludes the paper by summarizing our work and offers
future directions of research.
2 Related Work and Motivations
As discussed earlier, scheduling algorithms can be broadly classified into push and pull
based techniques. Given the wide variety of such push and pull based techniques we
only highlight the major schemes here. The optimal expected access time is achieved
when items are equally spaced [12]. The concept of fair channel utilization [6] and ef-
ficiency of Packet Fair Scheduling [10], [11] is also investigated. In order to get rid of
fixed access frequencies and number of broadcast channels [14], different heuristics are
also proposed in [15] to solve the NP-complete problem of dynamic broadcast chan-
nels. On the other hand, many preemptive and non-preemptive pull-based algorithms
like First Come First Served (FCFS), Most Requests First (MRF) [13] and R × W
algorithm [4] exist in literature. While MRF provides optimal waiting time for popu-
lar set of items, it suffers from un-fairness. FCFS on the other hand is fair, but suffers
from sub-optimality and convoy effect. A combination of these two [4] often provides
an acceptable solution.
Hybrid approaches, that use the flavors of both push-based and the pull-based schedul-
ing algorithms in one system, appears to be more attractive. In [3], the server pushes all
the data items according to some push-based scheduling, but simultaneously the clients
are provided with a limited back channel capacity to make requests for the items. A
model for assigning the bandwidth to the push- and pull-scheduling in an adaptive way
is proposed in [16]. A hybrid approach is also discussed in [9], which divides the data
items in disjoint push and pull sets, according to their degree of access probability. The
server broadcasts the push items, pre-computed by the Packet Fair Queuing scheduling,
51

and sends the pull item based on FCFS scheduling discipline, in a reciprocal way. In-
deed, let the push-set consist of the data items numbered from 1 up to K (cut-off point),
and let the remaining items from K + 1 up to D form the pull set. Hence, the average
expected waiting time for the hybrid scheduling is defined as:
T
exp−hyb
= T
exp−acc
+ T
exp−res
=
K
X
i=1
P
i
·
T
acc,i
+
D
X
i=K+1
P
i
·
T
res,i
.
where: T
exp−acc
is the expected access time for the push-set, T
exp−res
is the expected
response time for the pull-set, P
i
is the access probability of item i. As the push-set
becomes smaller, the T
exp−acc
becomes shorter, but the pull-set becomes larger, leading
to a longer T
exp−res
. The size of the pull-set might also increase the average access time
T
acc,i
, for every push item. After having found the minimum number B, called build-
up point, of items to be pushed so that the length of the pull queue in the system is in
average bounded by a constant, [9] chooses, as the cut-off point, the value K such that
K ≥ B and K minimizes the average expected waiting time for the hybrid system.
However, when either the system has a high load, i.e. a high number of requests for
unit of time, and/or all items have almost the same degree of probability, the distinction
between the high and low demand items becomes vague, artificial, hence the value of
build-up point B increases, finally leading to the maximum number D of items in the
system. Thus, in those cases, the solution proposed in [9] almost always boils down
to a pure push-based system. This motivates us to develop a more efficient algorithm
capable of improving the access time even in high load with items having same degree
of probability.
Our proposed solution partitions the data items in the push-set and the pull-set, but
it chooses the value of the cut-off point K between those two sets independent of the
build-up point. After each single broadcast, we do not flush out the pull-queue as in
[9]. In contrast, we just pull one single item: the item, which has the largest number of
pending requests. Note that simultaneously with every push and pull, N more access
/ requests arrive to the server, thus the pull-queue grows up drastically at the begin-
ning. In particular, if the pull-set consists of the items from K + 1 up to D, at most
N ×
P
D
j=K+1
P
i
requests can be inserted in the pull-queue at every instance of time,
out of which, only one, the pull item that has accumulated the largest number of re-
quests, is extracted from the queue to be pulled. However the number of distinct items
in pull-queue cannot grow uncontrolled as it will be shown by the analytic model in the
next section. Once that the analytic model has been devised, we take advantage from
it to make our system more flexible. Indeed, since by the analytic model the system
performance is already known with a good precision, it is possible to decide in advance
if the value of K currently in use at the server will satisfy the client request on time. If
not, K is updated in a suitable way again looking at the system performance analysis.
3 Basic Hybrid Algorithm: Performance Modelling, Simulation
Framework
The basic hybrid algorithm assumes that the value K of the cut-off point is given and
that the client makes a data request without any deadline. Then, the items from 1 to
52
K are pushed according to Packet Fair Scheduling algorithm and the remaining items
from K + 1 to D are pulled according to Most Request First (MRF) algorithm. The
server listens to all the requests of the clients and manages the pull-queue. The pull-
queue, implemented by a max-heap, keeps in its root, at any instant of time, the item
with the highest number of pending requests. For any request i, if i is larger than the
current cut-off point K, i.e. i > K, it is inserted in the pull-queue, the number of the
pending requests for i increased by one, and the heap information updates accordingly.
Vice versa, if i is smaller than or equal to K, i.e., i ≤ K, the server simply drops the
request because that item will be broadcast by the push-scheduling. The scheduling is
derived as explained in Figure 1, where the details for obtaining the push scheduling
are omitted. The interested reader can find them, for example, in [7]. To retrieve a data
item, a client performs the actions as illustrated in Figure 2. Note that the behavior of
client is independent of the fact that the requested item belongs to the push-set or to the
pull-set.
Procedure HYBRID SCHEDULING;
while (true) do
begin
obtain an item from the push scheduling;
broadcast this item;
if the pull-queue (is not empty) then
extract the most requested item;
clear the requests pending for it;
pull this item;
end-if
end;
Fig. 1. Hybrid Scheduling at the Server
In the remaining of this section, we investigate into the performance evaluation of
our basic hybrid scheduling system by developing suitable analytical models. Subse-
quently, we also validate this performance analysis by developing a simulation frame-
work and performing simulation experiments. Before going into the details of analytical
underpinnings, we explicitly state the underlying assumptions in our framework.
1. The arrival rate in the entire system is assumed to obey Poisson distribution with
mean λ
1
.
2. The service times of both the push and pull systems are exponentially distributed
with mean µ
1
and µ
2
, respectively.
3. The server pushes K items and clients pull the rest (D − K) items. Thus, the total
probability of items in push-set and pull-set are respectively given by
P
K
i=1
P
i
and
P
D
i=K+1
P
i
= (1 −
P
K
i=1
P
i
), where P
i
denotes the access probability of item
53
Procedure CLIENT-REQUEST (i):
/* i : client’s required item */
begin
send to the server the request
for item i;
repeat
wait;
until (listen i on channel)
end
Fig. 2. Algorithm at the Client Side
i. We have assumed that the access probabilities P
i
follow the Zipf’s distribution
with access skew-coefficient θ, such that, P
i
=
(1/i)
θ
P
n
j=1
(1/j)
θ
.
0, 0 1, 0
2, 0
i, 0
c, 0
c, 1i, 1
2, 1
1, 1
λ
λ
λ
λ
λ
λ
λ λ
λ λ
λ
µ
µ µ µ
µ
µ
µ
µ
µ
2
2
2
2 2
1 1
1
1
µ
2
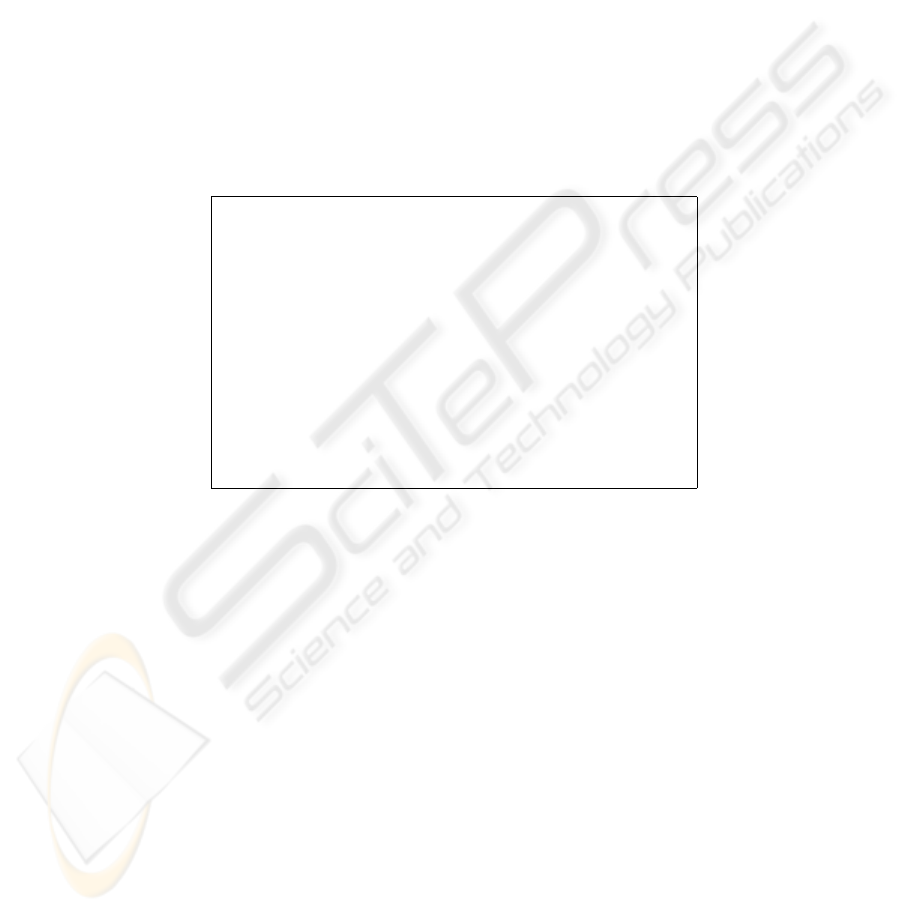
Fig. 3. Performance Modelling of Hybrid System
Figure 3 illustrates the underlying birth and death process of our system, where the
arrival rate in the pull-system is given by λ = (1−
P
K
i=1
P
i
)λ
1
. Any state of the overall
system is represented by the tuple (i, j), where i represents the number of items in the
pull-system. On the other hand, j is a binary variable, with j = 0 (or 1) respectively
representing whether the push-system (or pull-system) is currently being served by the
server. Naturally, both the arrival of the data items and their service are responsible
for the dynamics associated with the state transitions in the system. One major goal of
this performance analysis is to capture this system dynamics. This will lead to get an
expected, overall estimate of the system performance. We now enumerate these system
dynamics resulting from arrival and service of data items.
1. The arrival of a data item in the pull-system, results in the transition from state
(i, j) to state (i + 1, j), ∀i, such that 0 ≤ i < ∞ and ∀j ∈ [0, 1].
2. The service results in two different actions. Since, the push system is governed by
Packet Fair Queuein Sgcheduling, the service of an item in the push-queue results
in transition of the system from state (i, j = 0) to state (i, j = 1), ∀i such that 0 ≤
54

i < ∞. On the other hand, the service of an item in the pull results in transition of
the system from state (i, j = 1) to the state (i−1, j = 0), ∀i, such that 1 ≤ i < ∞.
3. The state of the system at (i = 0, j = 0) represents that the pull-queue is empty
and any subsequent service of the elements of push system leaves the system in the
same (0, 0) state.
4. Obviously, the state (i = 0, j = 1) is not valid because the service of an empty
pull-queue is not possible.
As the system reaches the steady-state, the total flow needs to be conserved. The
overall behavior of the system for both push (upper chain) and pull part (lower chain)
can now be estimated from Chapman-Kolmogrov’s general equation [8]. The steady-
state equations representing the push and pull parts of the system is given below:
p(i, 0)(λ + µ
1
) = p(i − 1, 0)λ + p(i + 1, 1)µ
2
(1)
p(i, 1)(λ + µ
2
) = p(i, 0)µ
1
+ p(i − 1, 1)λ, (2)
where p(i, j) represents the probability of state (i, j). However, since the state (0, 1)
is invalid and any service from state (0, 0) leaves the system in same state, the initial
condition of the system is represented by:
p(0, 0) λ = p(1, 1) µ
2
. (3)
The most efficient way to solve Equations (1) and (2) is using z-transforms [8]. ¿From
the definition of z-transforms, the resulting solutions will be of the form: P
1
(z) =
P
∞
i=0
p (i, 0) z
i
and P
2
(z) =
P
∞
i=0
p(i, 1) z
i
. Hence, dividing both sides of Equa-
tion (1) by µ
2
, letting ρ =
λ
µ
2
, f =
µ
1
µ
2
, and performing subsequent z-transforms, we
get,
P
2
(z) = p (1, 1) + z (ρ + f )[P
1
(z) − p(0, 0)] − ρ z
2
P
1
(z) (4)
= ρ p (0, 0) + z (ρ + f ) [P
1
(z) − p (0, 0)] − ρz
2
P
1
(z), [using Equation( 3)]
Now, investigating the system behavior at the initial conditions, we can derive the
following two normalization criteria:
1. The occupancy of pull states is the total traffic of pull queue. This occupancy is
given by:
P
2
(1) =
P
∞
i=1
p(i, 1) = ρ.
2. The occupancy of the push states (upper chain) is similarly estimated by:
P
1
(1) =
P
∞
i=1
p(i, 0) = (1 − ρ).
These above two relations can be used in Equation (4), to obtain the idle probability,
p(0, 0):
P
2
(1) = ρ p(0, 0) + (ρ + f) [P
1
(1) − p(0, 0)] − ρ P
1
(1) (5)
ρ = f(1 − ρ) − f p(0, 0), (using values of P (1)and P (2))
p(0, 0) = 1 − ρ −
ρ
f
Generalized solution of Equation (4) to obtain all values of probabilities p(i, j)
become very complicated. Thus, the most efficient way is to go for an expected measure
55

of system performance, such as the average number of elements in the system and
average waiting time. This expected system performance can be conveniently obtained
by differentiating the z-transformed variables, P
1
(z) and P
2
(z) and capture their values
at z = 1. Proceeding in this way and differentiating both sides of Equation (4) with
respect to z at z = 1, we get an estimate of the expected number of elements in the
pull-system (E[L
pull
]) as follows:
dP
2
(z)
dZ
|
z=1
= (ρ + f )
dP
1
(z)
dZ
|
z=1
+ P
1
(1) (f − ρ) − p(0, 0) (ρ + f ) − ρ
dP
1
(z)
dZ
|
z=1
(6)
E[L
pull
] = (ρ + f ) E[L
push
] + (1 − ρ) − (ρ + f )(1 − ρ −
ρ
f
) − ρ E[L
push
]
=
µ
1
µ
2
K
X
i=1
S
i
ˆ
P
i
+
µ
1 −
λ
µ
2
¶
−
µ
λ + µ
1
µ
2
¶µ
1 −
λ
µ
2
−
λ
µ
2
¶
, (as E[L
push
] =
K
X
i=1
S
i
ˆ
P
i
) (7)
where E[L
push
] denote the the expected system performance for the push part, and
where, according to the Packet Fair Queueing Scheduling, S
i
is the space between two
instances of the same data item i defined as S
i
=
P
K
j=1
√
ˆ
P
j
√
ˆ
P
i
and
ˆ
P
i
=
P
i
P
K
j=1
P
j
.
Once, we have the expected number of items in the pull system from Equation (6),
using Little’s formula [8], we can easily obtain the estimates of average waiting time of
the system (E[W
pull
]), average waiting time of the pull queue (E[W
q
pull
]) and expected
number of items (E[L
q
pull
]) in the pull queue as:
E[W
pull
] =
E[L
pull
]
λ
; E[W
q
pull
] = E[W
pull
] −
1
µ
2
; E[L
q
pull
] = E[L
pull
] −
λ
µ
2
(8)
In conclusion, the expected access-time (E[T
hyb−acc
]) of our hybrid system is given
by:
E[T
hyb−acc
] =
K
X
i=1
S
i
ˆ
P
i
+ E[W
q
pull
] ×
D
X
i=k+1
P
i
(9)
The expressions provided in Equations ( 6), ( 8) and ( 9) provide an estimate of the
average behavior of our hybrid system when the cut-off assume the value of K.
In order to validate the performance analysis, we have compared our analytical
results, obtained from plotting the numerical values of Equation( 9), with the sim-
ulation results assuming D = 100, λ
1
= 10 (analytic), N = 10 (experimental),
0.50 ≤ θ ≤ 1.30 in correspondance of the value of K which minimize the expected
waiting time in our experiments. The value of µ
1
and µ
2
are estimated as µ
1
=
P
K
i=1
P
i
and µ
2
=
P
D
i=K+1
P
i
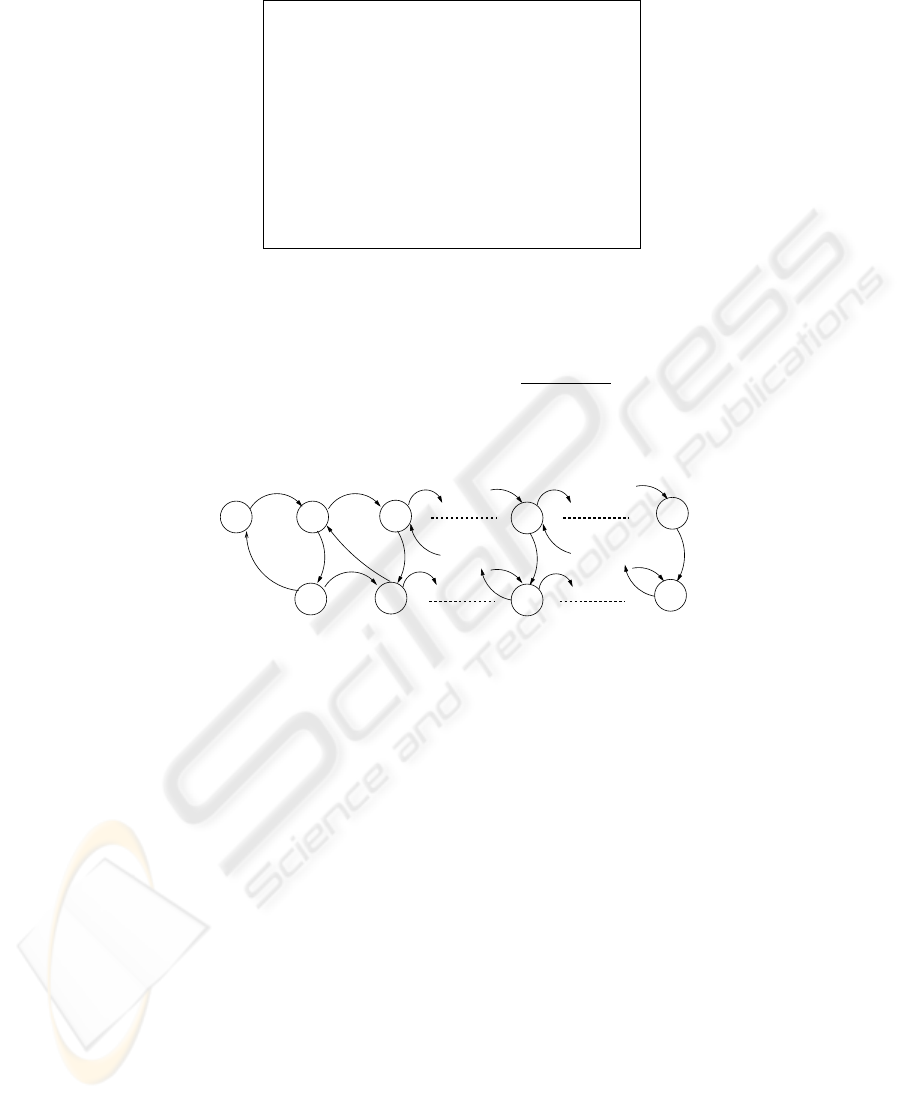
. Figure 4 demonstrates analytical results closely follow the sim-
ulation results with a deviation of 15%–20%.
Moreover, Figure 5 illustrates, by experimental results, the dynamism of expected
access-time with variation of θ for N = 10 and D = 100. The access-times for different
values of θ have a similar trend and decreases for a cut-off point in the range K ∈
[0, 35]. The curves remains almost flat in the region 35 ≤ K ≤ 50. This points out a
56
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
20
30
40
50
60
70
80
Experimental Vs. Analytical results
Access Skew Coefficient (θ)
Expected Access time
Experimental results
Analytical results
Fig. 4. Comparison of Experimental and Analytical Performances
fair and optimal mix of push and pull scheduling. Then the expected access-time start
increasing again.
0
10
20
30
40
50
60
70
80
90
100
10
20
30
40
50
60
70
80
Expected Access Time for N=10
Cut−off Point (K)
Expected Access time
θ = 0.60
θ = 0.80
θ = 1.0
θ = 01.20
Fig. 5. Expected Access Time for N = 10 and D = 100
Simulation experiments are also performed to compare our hybrid scheduling scheme
with previous existing scheduling algorithms. We have chosen our previous hybrid
scheduling algorithm [9], and pure-push scheduling algorithm as performance bench-
marks of our new scheduling algorithm. The simulation experiments are evaluated for
57
D = 100, for N = 10 and N = 20. and for θ varying from 0.50 to 1.30. The results
are reported in Table 1 and 2, respectively for N = 10 and N = 20.
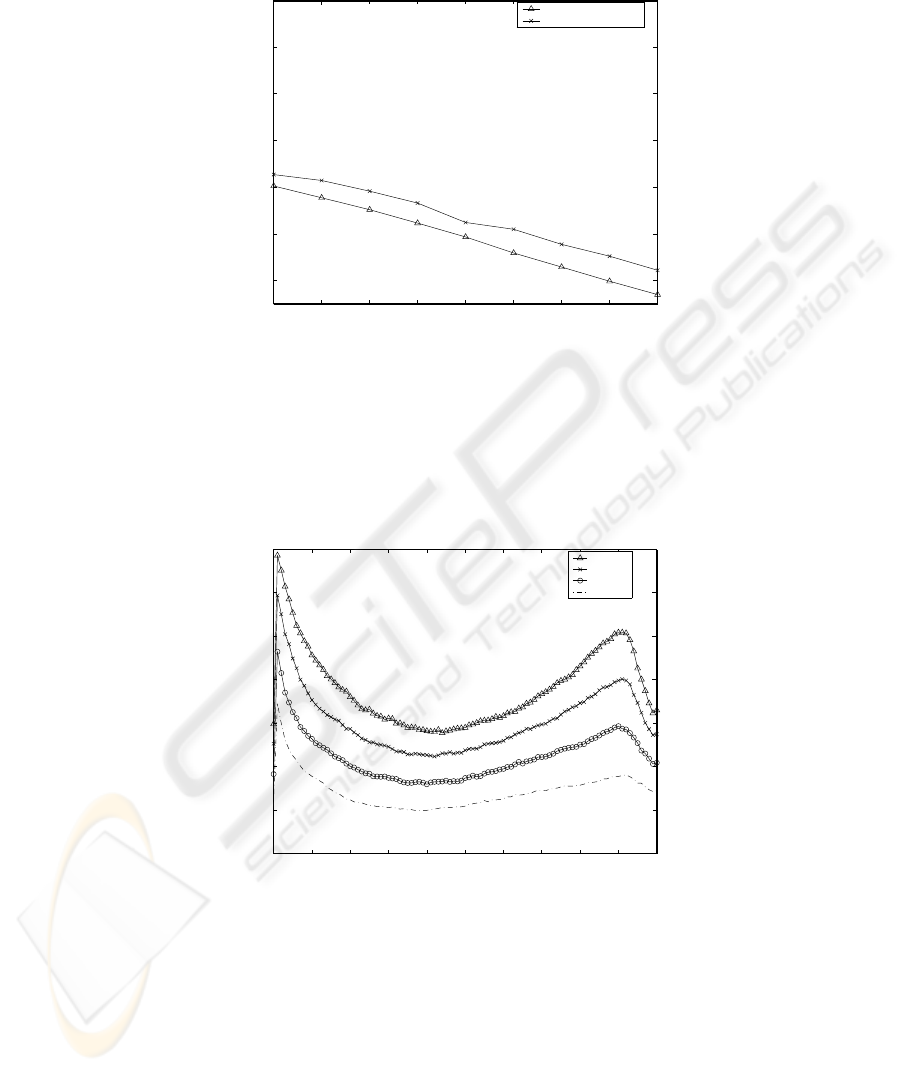
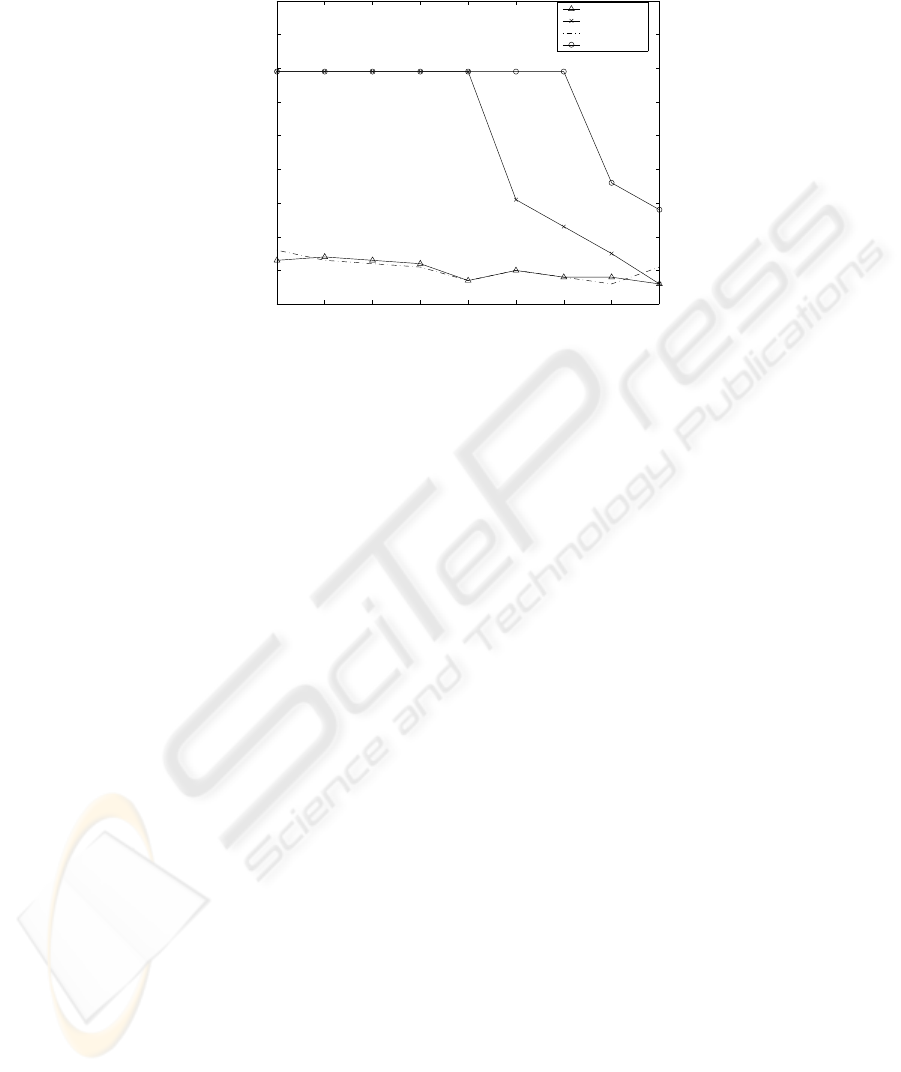
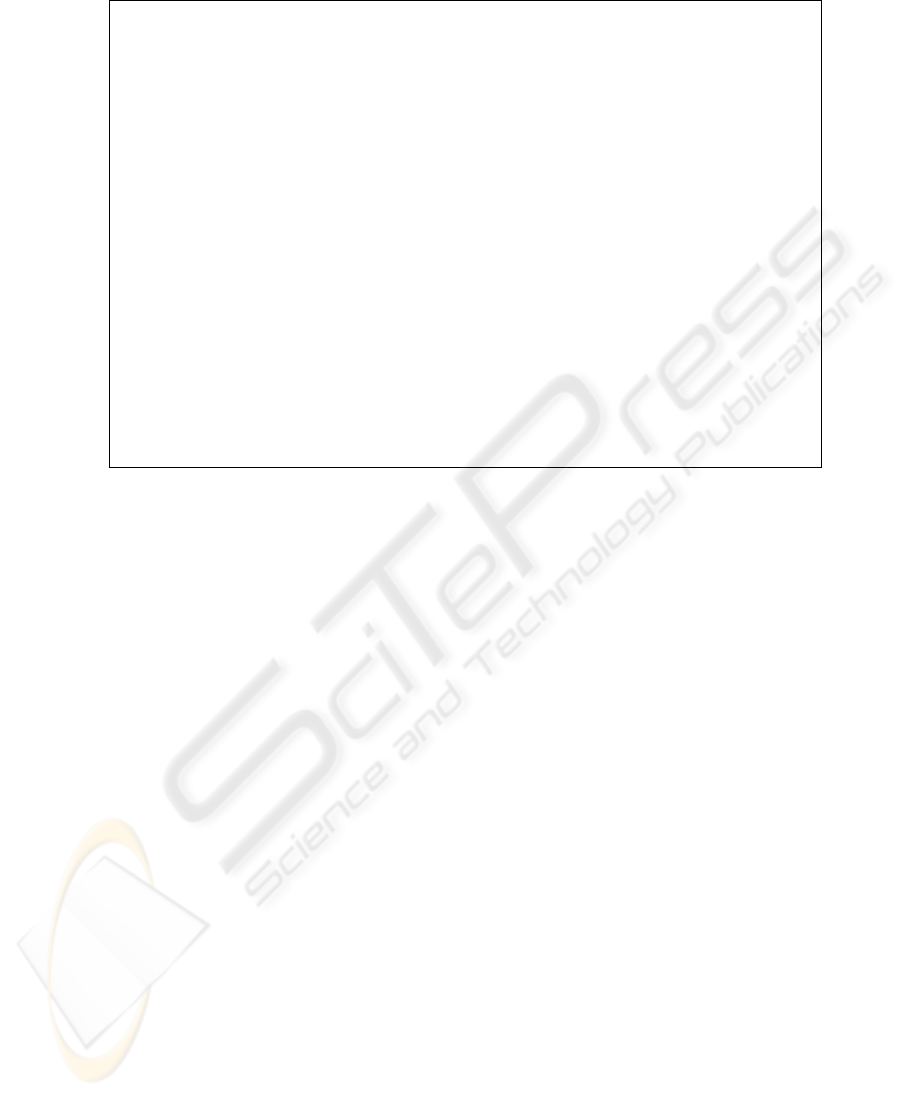
Figures 6 and 7 (B) show the results of performance comparison between our new
algorithm with that of pure-push scheduling and the comparison of the cut-off point
between the new algorithm and [9] when K is selected so that the average waiting
time is minimized. Both of these figures reveal that our basic new algorithm achieves
an improvement over our existing strategy and over the existing pure-push system. As
earlier discussed, when the system is highly loaded, the scheduling algorithm in [9],
whose cut-off point K must be larger than the build-up point B, almost reduces to the
pure-push scheduling. Contradictory to [9], the new basic hybrid algorithm, even with
very high loaded system, experiments better results than a pure-push based system as
illustrated in Figure 6. Besides, in Figure 7, the values of the cut-off point K for which
the access waiting time of the system is minimal for the basic hybrid algorithm, and for
the hybrid scheduling proposed in [9] are depicted for N = 10 and N = 20.
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
15
20
25
30
35
40
45
50
Push Vs. Hybrid, D = 100
Access Skew Coefficient (θ)
Expected Access time
Push
Hybrid−N=10
Hybrid−N=20
Fig. 6. Pure-Push Scheduling Vs New Algorithm
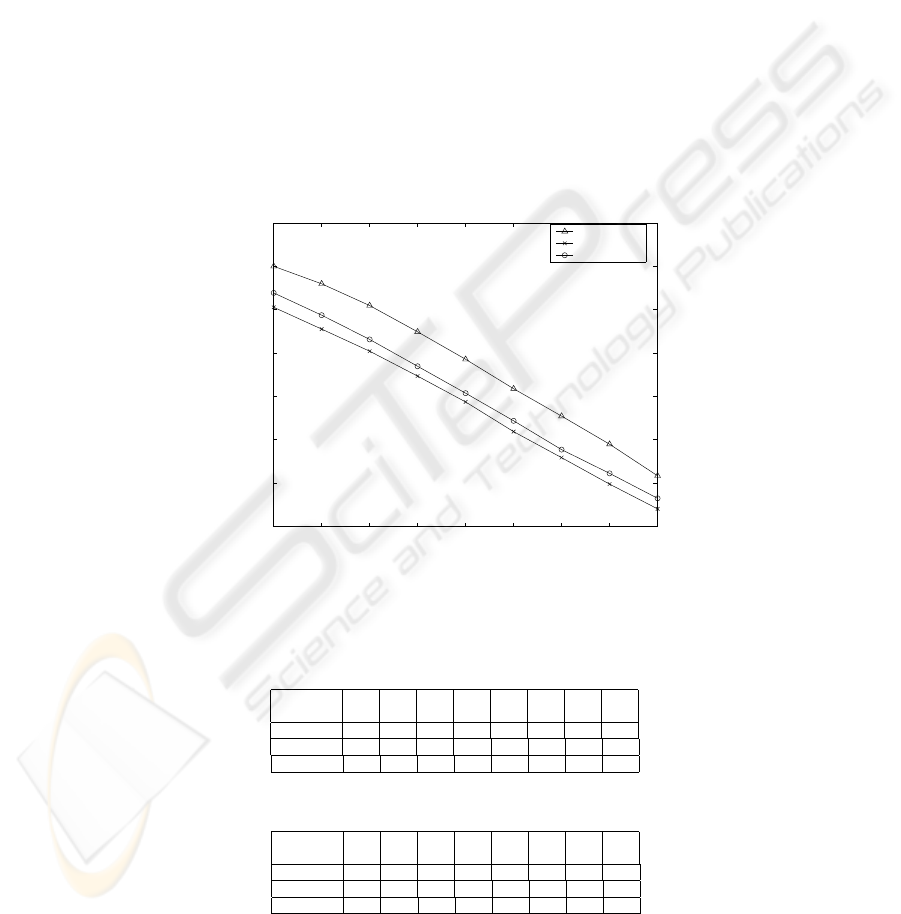
Table 1. T
exp−hyb
for different values of θ (in columns) and different algorithms when N = 10
0.50
0.60
0.70
0.80
0.90
1.00
1.10
1.20
1.30
New 40.30
37.78
35.23
32.36
29.38
25.95
22.95
19.90
17.04
[9] 44.54
42.35
40.01
37.31
34.12
29.93
24.38
20.61
17.04
Push 45.03
43.01
40.50
37.47
34.30
30.90
27.75
24.50
20.86
Table 2. T
exp−hyb
for different values of θ (in columns) and different algorithms when N = 20
0.50
0.60
0.70
0.80
0.90
1.00
1.10
1.20
1.30
New 41.96
39.39
36.59
33.49
30.39
27.20
23.88
21.14
18.26
[9] 44.44
42.45
40.10
37.39
33.78
30.69
27.54
23.23
19.49
Push 44.70
42.61
40.30
37.65
34.12
30.78
27.71
23.94
21.07
58
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
30
40
50
60
70
80
90
100
110
120
Cut Off Point with N = 10 and 20
Access Skew Coefficient (θ)
Cut of ponit (K)
New, N=10
[9], N = 10
New, N = 20
[9], N = 20
Fig. 7. Cut-Off Point when N = 10, 20.
4 New Hybrid Scheduling Algorithm
While the performance evaluation of our new basic hybrid scheduling algorithm has
already pointed out its significant gains in both response time and minimizing the
value of the cut-off point when compared to existing algorithms and pure push-based
scheduling, we now proceed to mention the complete version of our new algorithm
with performance guaranteed quality that our new scheduling scheme is capable to of-
fer. Such performance guarantee is required to deliver, for example, the wireless voice
and data packets within a precise time-frame of service, thereby ensuring a certain level
of quality-of-service (QoS).
Essentially for all D possible values of the cut-off point, the server computes the
expected hybrid waiting time E[T
hyb−access
] using the Equation( 9) in Section 3. From
now on, let E[T
hyb−access
(i)] denote such expected hybrid waiting time when i is the
cut-off point value. These D expected waiting times are stored, one-at-a time along
with the index of the cut-off point that generates it, sequentially in a vector V . That
is, for all 1 ≤ i ≤ D, V[i, 1] = [E[T
hyb−access
(i)] and V[i, 2] = i]. Moreover V is
maintained sorted with respect to the first componenet, i.e. the expected hybrid waiting
time. With this structure, the server can extract the first element V[0] of this vector in
a single access, which will indicate in correspondence of which value K
0
of the cut-
off point the minimum expected hybrid waiting time V[0, 1] = E[T
hyb−access
(K
0
)] is
achieved. The server broadcasts V[0] from time to time, thereby informing the clients
of the best performance it can provide. Moreover, the server continuously broadcasts
the basic hybrid scheduling that corresponds to the cut-off point K in use we discussed
in previous section. On the other side, when a client sends a request for any item j, it
also specifies an expectation ∆(j) of its possible waiting time for item j. Indeed, ∆(j)
59

reflects the nature of the application, and the tolerance of the client. For example, a
client requesting for any real-time video application, will expect a time much lower than
any client requesting data service-specific applications. Moreover, an impatient client
could ask that its request is served in a time much lower than its moderate counterparts.
In order to accept a client request for item j with expectation ∆(j), the server es-
timates the expected waiting time for j at this current time instant using the values
stored in vector V and the knowledge of the current cut-off point K in use for the
hybrid scheduling algorithm broadcasted by the server. If the expected hybrid waiting
time provided by the system is smaller or equal to the expectation time of the client’s
request, then the certain level of QoS expected by the client is guaranteed. Otherwise,
the server checks whether the item j belongs to its current push set, that is if j ≤ K.
If this is true, it compares the client request deadline with the expected waiting time
guaranteed by the Packed Fair Scheduling Queueing for the push part of the system,
say E[T
P F S
(j)]. Recall that such a value is known and it is proportional to the space
S
j
between two instances of j in the Packed Fair Queueing Scheduling [10], and it is
different from the overall expected waiting time of the server although it depends on
the cut-off point in use. Now, if the expectation of the client 2E[T
P F S
(j)] is smaller
than or equal to ∆(j), the request can still be accepted and the performance guarantee.
Note that the E[T
P F S
(j)] is doubled to take in the figure the fact that the system pulls
one item between two consecutive puhed items. Otherwise, the request can be accepted
only if the cut-off point is updated. Indeed, the server will perform a binary search on
the vector V to look for a cut-off point value whose corresponding expected hybrid
waiting time is the largest value smaller than or equal to ∆(j). Note that such a value
always exists if V[0, 1] ≤ Delta(j). Then, the cut-off point is updated accordingly and
the scheduling re-initialized. Note that the adjustment in push and pull sets results in
some overheads, and in practice, the server may be forced to reject requests to avoid
to pay such an overhead too frequently. Figure 8 provides a pseudo-code for this entire
procedure of performance guarantee.
5 Conclusion
In this paper we have proposed and analyzed the performance guarantee of a new hy-
brid, scheduling algorithm. In Section 3, we have evaluate a basic hybrid algorithm
which separates the items in two sets, one to be pushed and one to be pulled. The sec-
ond contribution of our approach lies in offering to each client the possibility to specify
a deadline, providing him/her the flexibility to choose his/her best suitable access-time.
To react to a request with expectation time, the system may need to recompute the cut-
off point. The overhead of this operation is kept as low as possible. Future work will
be devoted to study the overhead incurred by the system and how to keep it as low as
possible.
Acknowledgment
The authors are thankful to K. Basu and S.K. Das for their helpful discussions.
60
1. for (i = 1 to D) do
2. compute the average waiting time E[T
hyb−access
(i)];
3. sort all the values of E[T
hyb−access
(1)], . . . , E[T
hyb−access
(D)] and
store them in increasing order in a vector V
4. broadcast to the clients the min{affordable waiting time} V[0];
do
5. accept the client’s request for any item j with expected
waiting-time ∆(j) ≥ E[T
hyp−access
(K)], where K = current cut-off;
6. if (condition at line 5 is not verified and j ≤ K)
accept the client’s request for any item j with expected
waiting-time ∆(j) ≥ 2E[T
P F S
(j)], where E[T
P F S
(j)] is the
expected waiting time guaranteed by Packet Fair Scheduling;
7. if (both conditions at lines 5 and 6 are not verified) and
(∆(j) is larger than expected waiting time stored in V [0, 1])
8. get the largest value of E[T
hyb−access
(j)] ≤ ∆(j) from V
9. adjust the cut-off point and restart new hybrid scheduling;
10.otherwise reject the request.
while (true)
Fig. 8. Performance Guarantee in Hybrid Scheduling
References
1. S. Acharya, R. Alonso, M. Franklin and S. Zdonik. Braodcast Disks: Data Management for
Asymmetric Communication Environments. In In the proceedings of ACM SIGMOD Conf.,
San Jose, May 1995.
2. S. Acharya, M. Franklin and S. Zdonik. Dissemination-Based Data Delivery using Broadcast
Disks. In IEEE Personal Communications, pages 50–60, Dec 1995.
3. S. Acharya, M. Franklin, and S. Zdonik. Balancing push and pull for data broadcast. In
Proceedings of the ACM SIGMOD Conference, Tuscon, Arizona, pages 183–193, May, 1997.
4. D. Aksoy and M. Franklin. RxW: A scheduling approach for large scale on-demand data
broadcast. In IEEE/ACM Transactions on Networking, Vol. 7, No. 6, Dec, 1999.
5. A. Bar-Noy, J. S. Naor and B. Schieber. Pushing Dependent Data in Clients-Providers-
Servers Systems. In Mobile Networks and Applications, Vol. 9, pages 421-430, 2003.
6. J. C. R. Bennett and H. Zhang. Hierarchical packet fair queueing algorithms In Proceedings
of ACM SIGCOMM, pages 43-56, 1996.
7. J. Gecsei, The architecture of videotex systems Englewood Cliffs, NJ, Prentice-Hall, 1983
8. D. Gross and C. M. Harris, Fundamentals of Queuing Theory John Wiley & Sons Inc.
9. Y. Guo, S. K. Das and M. C. Pinotti. A new Hybrid Broadcast scheduling Algorithm for
Asymmetric Communication Systems: Push and Pull Data based on Optimal Cut-Off Point.
In Mobile Computing and Communications Review (MC2R), Vol. 5, No. 4, 2001.
10. S. Hameed and N. H. Vaidya. Efficient algorithms for scheduling data broadcast In Wireless
Networks, Vol. 5, pages 183-193, 1999.
11. S. Hameed and N. H. Vaidya. Scheduling data broadcast in asymmetric communication
environments In Wireless Networks, Vol. 5, pages 171-182, 1999.
61

12. R. Jain and J. Werth. Airdisks and airraid: Modeling and scheduling periodic wireless data
broadcast (extended abstract) In DIMACS Technical Report 95-11, Rutgers University, 1995.
13. M. C. Pinotti and N. Saxena. Push less and pull the current highest demaned data item to
decrease the waiting time in asymmetric communication environments. In 4th International
Workshop on Distributed and Mobile Computing, (IWDC), Calcutta, India pages 203–213.
Springer-Verlag 2002; LNCS 2571, Dec 28-31, 2002.
14. W. C. Peng and M. S. Chen. Dynamic generation of data broadcasting programs for a broad-
cast disk array in a mobile computing environment. In Proceedings of the ACM 9th Confer-
ence on Information and Knowledge Management, pages 38-45, Nov. 2000.
15. W. C. Peng, J. L. Huang and M. S. Chen. Dynamic Levelling: Adaptive Data Broadcasting
in a Mobile Computing Environment. In Mobile Networks and Applications, Vol. 8, pages
355-364, 2003.
16. K. Stathatos and N. Roussopoulos and J. S. Baras. Adaptive data broadcast in hybrid net-
works In Proceedings of 23rd International Conference on Very Large Data Bases, Athens,
Greece, pages 326-335, 1997
62
