
Camera
Control for a Distant Lecture Based on
Estimation of a Teacher’s Behavior
Atsushi Shimada
1
, Akira Suganuma
1
, and Rin-ichiro Taniguchi
1
1
Department of Intelligent Systems, Kyushu University
6-1 Kasuga-koen, Kasuga, 816-8580, Japan
Abstract. The growth of communication network technology enables people to
take part in a distant lecture. We are developing a supporting system for a dis-
tant lecture named ACE (Automatic Camera control system for Education). The
previous version of ACE captures the lecture focusing on the latest object writ-
ten on a blackboard because a teacher frequently explains it. However, a teacher
not always explains the latest object. We have designed, therefore, ACE to take a
suitable shot according to a teacher’s behavior. This paper describes our system,
our camera control strategy, the algorithm to estimate a teacher’s behavior in a
lecture and experiment of our system.
1 Introduction
The growth of communication network technology enables people to take part in distant
lectures. When a lecture scene is captured, a camera-person usually controls a camera
to take suitable shots. (Alternatively, the camera is static and captures the same location
all the time.) However, it is not easy to employ a camera-person for every occasion.
However the scene captured by a x ed camera hardly gives us a feeling of the live lec-
ture. It is necessary to control a camera automatically. We are developing a supporting
system for a distant lecture. We call it “ACE” (Automatic Camera control system for
Education).
There are some methods to support distant lectures. For example, Kameda et al.
[1][2] and Onishi et al. [3][4] have been studying some supporting systems. They use
multiple cameras and switch them according to the situation of the lecture. Their both
systems track a teacher and capture him/her mainly. It is important to capture a teacher,
but it is more important for students to see objects (a character, a sentence, a gure, a
table, or so) explained by him/her.
ACE captures important scenes in a lecture. Both objects written by a teacher on
a blackboard and an area that he/she is explaining are important. The previous version
of ACE[5] [6] mainly captured the objects written on the blackboard because a teacher
frequently explains them. It, however, could not take a suitable shot if a teacher ex-
plained an object written before. Moreover, the video captured by the previous version
of ACE is fatiguing to student’s eyes because the video scene is often changed owing
to zoom in, zoom out, pan-tilt and so on. We have designed, therefore, ACE to take an
Shimada A., Suganuma A. and Taniguchi R. (2004).
Camera Control for a Distant Lecture Based on Estimation of a Teacher’s Behavior.
In Proceedings of the 4th International Workshop on Pattern Recognition in Information Systems, pages 15-24
DOI: 10.5220/0002677600150024
Copyright
c
SciTePress
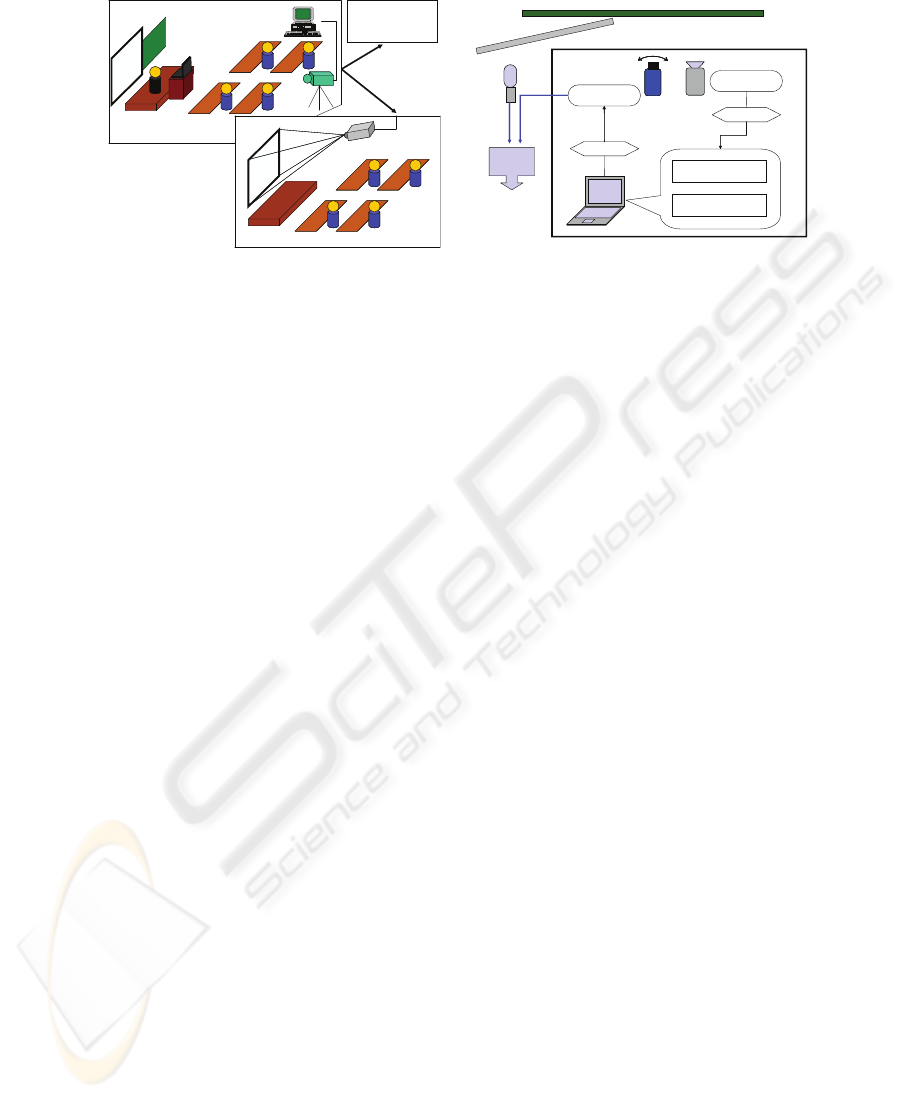
Distant Classroom n
Distant Classroom 1
Local Classroom
Network
Screen
Blackboard
Fig.1. Lecture style assumed in ACE
Active camera
Fixed camera
Image
Video
Lecture
Scenes
Blackboard
Distant
classroom
Pan, tilt and
zoom in
PC
ACE
Screen
Image processing
Camera control
IEEE-1394
RS-232C
Control
Audio
Fig.2. Framework of ACE
area explained by a teacher. ACE need to estimate the teacher’s behavior for this design.
When the teacher is writing an object on a blackboard, ACE captures the teacher and
the object mainly. When he/she is explaining to his/her students, ACE captures the lat-
est object and, if necessary, the objects written on the blackboard before. In this study,
we contrived the estimation method of the teacher’s behavior and made ACE nd the
target area to capture according to his/her behavior.
In this paper, section 2 presents design of ACE and our strategy of camera con-
trol. Section 4 describes the algorithm to estimate a teacher’s behavior in a lecture,
and section 5 describes an experiment that we applied ACE to video lectures. Finally,
concluding remarks are given in section 6.
2 Overview of ACE
2.1 Design
A style of the distant lecture which we envisage is illustrated in Fig.1. A teacher teaches
his/her students in a local classroom, and students in remote classrooms take part in the
lecture by watching the video captured in the local classroom. ACE supports the lecture
in which a teacher teaches his/her students by using both a blackboard and a screen.
2.2 Framework of ACE
Fig.2 shows the framework of ACE. ACE needs two cameras. One is a x ed camera,
which captures whole lecture scene for image processing. The other is an active camera
to capture a suitable shot, and its video is transmitted to remote classrooms. The im-
age captured by the x ed camera is sent to PC (in Fig.2) over an IEEE-1394. The PC
analyzes the image and controls the active camera via an RS-232C. The video and the
audio picked up by a microphone are sent to remote classrooms via the network using
DVTS (Digital Video Transport System)[8].
16

2.3 Camera Control Strategy
What does ACE capture? One solution for this problem is to take the scene that students
want to watch, but many scenes are probably requested by many students at the same
time. Although this solution needs the consensus of all students, it is very dif cult to
make it. We have decided, therefore, that ACE captures the most important thing from
a teacher’s point of view. When we designed the previous version of ACE, we assumed
that the most important thing is the latest object written on the blackboard. The previous
version of ACE took a shot zoomed in on the object after the teacher had written it on
the blackboard. After a-few-second zooming, the previous version of ACE zoomed out
and take a shot containing the latest object and a region near it. However, this strategy
has some problems. The previous version of ACE cannot take a suitable shot when
the teacher explains object written before. The lecture scene captured by the previous
version of ACE changes at short intervals because the latest object is often found when
he/she goes on writing objects on the blackboard for a long periods of time. Such a
video is not appropriate for students who take part in the distant lecture.
We have adopted, therefore, the strategy that ACE captures an object explained by
a teacher. When the teacher is writing object on a blackboard, ACE captures the teacher
and the object. When he/she is explaining to his/her students, ACE captures the latest
object. If he/she is explaining the objects written on the blackboard before, ACE also
captures them. On the other hand, the image processing component on the PC checks
whether the next target which ACE should capture is included in the current capturing
area or not. If the next target is included, ACE need not move the active camera. This
solves the problem that the lecture scene changes at short intervals. When he/she is
explaining the objects on the screen, ACE captures whole of the screen even if the
objects are anywhere on the screen.
3 Teacher’s Behavior Model
3.1 Teacher’s Behavior in a Lecture
We observed some lecture videos (Table 1) to nd out what behavior a teacher is doing
in his/her lecture. We found out that the behavior of the teacher could be categorized
into three kinds: “Writing”, “Explaining” and “Moving”. When the teacher was writing
some objects on the blackboard, we categorized his/her behavior as “Writing”. When
the teacher was explaining objects on the blackboard or on the screen, we categorized
his/her behavior as “Explaining”. We categorized the other kind of behavior as “Mov-
ing”. Table 1 shows the ratio of each behavior in the lectures.
3.2 Creating Teacher’s Behavior Model
We got the position of the teacher’s centroid g(t) = (g
x
(t), g
y
(t)), face f (t) = (f
x
(t), f
y
(t))
and hand h(t) = (h
x
(t), h
y
(t)) from the Video A in Table 1 by the hand work in 2 fps.
The positions may be represented as a time series I(0), I(1), · · · , I(T ), where I(t)
denotes the position of the teacher’s centroid, face, and hand at time t.
I(t) = (g
x
(t), g
y
(t), f
x
(t), f
y
(t), h
x
(t), h
y
(t)) (1)
17
Table 1. The lecture videos we observed and the ratio of each behavior
Teacher
Length (min)
Lecture Style
Writing
Explaining
Moving
Video A
A
40
Use Only Blackboard
47.9%
44.6%
7.5%
Video B
B
60
Use Only Blackboard
36.8%
54.3%
8.9%
Video C
C
25
Use Blackboard and Screen
10.8%
85.9%
3.3%
Video D
D
60
Use Blackboard and Screen
13.2%
81.7%
5.1%
We got 1,463 data for the behavior “Writing”, 1,248 data for “Explaining” and 857 data
for “Moving”. We made 5-dimensional feature vector v = (v
1
(t), v
2
(t), v
3
(t), v
4
(t), v
5
(t))
T
by using I(t) and I(t − 1). The feature vector has following ve elements.
v
1
(t) = |f
x
(t) − f
x
(t − 1)| (2)
v
2
(t) = |f
y
(t) − h
y
(t)| (3)
v
3
(t) =
q
(f
x
(t) − h
x
(t))
2
+ (f
y
(t) − h
y
(t))
2
(4)
v
4
(t) = |g
x
(t) − h
x
(t)| (5)
v
5
(t) = |g
y
(t) − h
y
(t)| (6)
The v
1
is the horizontal movement of the teacher’s face. The v
2
is the vertical differ-
ence between his/her face and hand. When a teacher writes an object on the blackboard,
the position of his/her face changes a little. In addition, his/her hand is close to his/her
face. According to above features, we chose v
1
and v
2
as the elements of the feature
vector. When a teacher explains to his/her students, he/she use his/her body to physi-
cally express words. Therefore, the positional relationship among his/her centroid, face
and hands are very important. The distance between his/her face and hand (v
3
), the lat-
eral difference (v
4
) and the vertical difference (v
5
) between the centroid of his/her body
and hand are picked out for such occasions.
Fig. 3 shows a scatter plot of 300 samples projected onto the (v
1
, v
2
) subspace. The
circles in Fig. 3 show “Writing”, the squares show “Explaining”, and the triangles show
“Moving”. We can regard the feature vectors as the distribution of the points over the
vector space. We use the Gaussian mixture model in order to approximate the distribu-
tion. The Gaussian mixture modeling approximates a probability density function by a
weighted sum of multivariate Gaussian densities[7]. We applied EM-algorithm to esti-
mate the parameter set of the Gaussian mixture model. We got three stochastic models
(“Writing”, “Explaining” and “Moving”) in 5-dimensional vector space.
4 Processing of ACE
In this section, we describe the processing of ACE. ACE’s process consists of three
steps: estimating of the teacher’s behavior, looking for the area explained by him/her,
and nding a target area to take a suitable shot.
18

The Movement of the Face to the Lateral Direction
The Veretical Difference between
the Face and the Hand
Writing Explaining Moving
Fig.3. The plot of samples projected onto (v
1
, v
2
) subspace
4.1 Estimation Teacher’s Behavior
ACE analyzes the image captured by the x ed camera to estimate the teacher’s behavior.
ACE detects the teacher’s region at the rst step. Next, it extracts features to estimate
his/her behavior. Finally, it estimates his/her behavior.
Detecting Teacher’s Region
ACE has to segment a teacher. We use a background subtraction technique to detect
objects in the image. The background image is captured before opening the lecture. The
image contains the screen and the blackboard on which no object was written. After sub-
tracting the background from the image captured by the x ed camera during the lecture,
ACE can get a foreground image. It consists of objects written on the blackboard, the
teacher and so on. We would like to detect only the teacher. We apply, therefore, the ero-
sion to the foreground image. We use a 5 × 5 mask because the objects or the noise in
the image are thinner and smaller than the teacher’s body. After the erosion, our system
makes the histogram of all highlight pixels in the ltered image because some noises
are still remained in the image. ACE extracts the teacher’s region from the histogram
by setting an appropriate threshold. A sample of the teacher’s region is shown in Fig. 4.
Extraction of Features
After detection of the teacher’s region, ACE extracts feature points I(t). ACE acquires
the centroid of the teacher as the center of the highlight pixels in the teacher’s region.
The teacher’s face and hands are detected by extracting skin color pixels in the teacher’s
region. We used HSV color space to extract skin color pixels. However, the teacher’s
hand is often hidden by his/her own body, so our system sometimes detects his/her
both hands and sometimes detects only one hand or no hand. Our system categorizes,
therefore, the skin color area into at most three clusters, because the skin color area
consists of three parts, by applying the k-means clustering method.
19
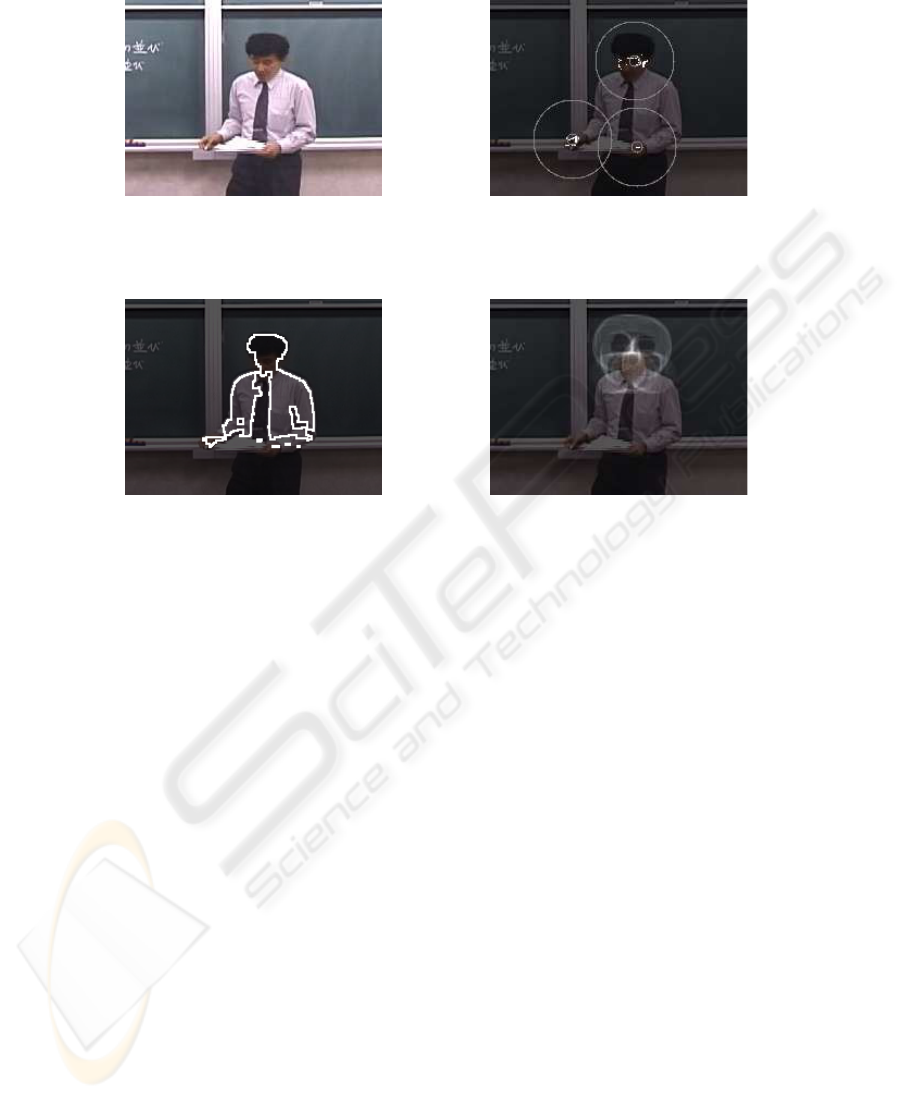
Fig.4. The teacher’s region Fig.5. The result of clustering
Fig.6. The edge pixels in the teacher’s region Fig.7. The Hough transform
Fig. 5 is the result of clustering. The white colored circles show the clusters. ACE
needs to categorize the clusters into his/her face and hands. We use the Hough transform
to detect a face because the shape of the face can be approximated as a circle. Fig. 6
shows the edge pixels in the teacher’s region. ACE votes the central point of circle,
which has an edge pixel on the circumference in upper half of the teacher’s region. Fig.
7 shows the result of voting. The white dots in the gure are the pixels which were voted
as the central point of circle. Generally, the Hough transform takes much time. However,
ACE can the image processing in 2 fps because it applies the Hough transform in the
very narrow range. ACE extracts the pixel which was voted at the greatest numbers
as the center of the teacher’s face. The face position, which was detected by the Hough
transform, is compared with each cluster. ACE categorizes the nearest cluster as a facial
area. The other clusters are regarded as teacher’s hands.
Estimation
ACE calculate the feature vectors by using the feature points which were gotten in
subsection 4.1. ACE puts the feature vector into the Gaussian mixtures which indicate
each behavior model, and acquire probability of each behavior. The behavior whose
probability is highest is regarded as the teacher’s behavior.
20

4.2 Looking for Explained Area
A teacher explains to his/her students the latest object written on the blackboard or the
object written before. ACE acquires the position of the object written on the blackboard
by applying the background subtraction and noise reduction to the image sequence
except for teacher’s region. A teacher generally tends to explain newer object then older
one. ACE labels the objects to record the latest object. ACE refers to labels and decides
the area explained by him/her.
When a teacher explains to his/her students the object written before, he/she moves
near the object, or points his/her nger at the object. In the former case, the explained
area is near the teacher’s region. In the latter case, ACE calculate the vector from the
centroid of the teacher to his/her hand. If the magnitude of the vector is larger than the
threshold which we set, ACE assumes he/she is pointing /his/her nger at the object. If
there is an object written on the blackboard on the straight line which is stretched from
the vector, the object and a region near it are explained area.
4.3 Finding Target
ACE nds a target area according to a parameter set θ = {p
1
, p
2
, p
3
, p
4
, p
5
} described
in Table 2.
Table 2. The parameter for the camera control
p
1
the teacher’s behavior
p
2
the position of the objects written on the blackboard
p
3
the positon of the teacher
p
4
the area explained by the teacher
p
5
the time when ACE controled the zoom rate of the active camera at last@
ACE changes the zoom rate of the active camera according to the teacher’s behavior
(p
1
). If the interval between the times when ACE changed the zoom rate is short, it
doesn’t change the zoom rate. In the case of changing the zoom rate, ACE records the
time (p
5
).
When the teacher’s behavior is “Writing”, ACE zoom in and takes a shot with a
focus on the latest object and the teacher. ACE calculates the target area by using p
2
and p
3
. When it is “Explaining”, ACE zooms out a little and takes a shot with a focus
on the objects explained by him/her. p
4
is used to decide the target area.
5 Experiment
5.1 Preparation
We evaluated our image processing by using lecture videos which had been captured
previously. We prepared the following lecture videos in Table 3.
21
Table 3. The detail of the lecture video
Teacher
Lecture Style
Length (min)
Video 1
A
Use Blackboard Only
20
Video 2
C
Use Blackboard Only
19
Video 3
C
Use Blackboard and Screen
25
The Video 1 is the lecture video which the same teacher appears on the Video A (in
Table 1). The teacher on the Video 2, 3 is another one. We apply the image processing
of ACE to the Video 1, 2, 3. First, we investigated whether the position of the teacher’s
face and hands extracted by ACE is correct or not. Next, we evaluated the estimation
result of teacher’s behavior. Finally, we veri ed how accurately the ACE nd the target
to capture the lecture scene. ACE calculates the target area from the parameters in Table
2, and display the rectangle on the video window as the target area.
5.2 Result of Experiment
How accurately did ACE extracted the feature points?
Table 4 shows the precision ratio and the recall ratio. Precision ratio means how much
correct the positions which ACE extracted are, is de ned by formula (7). ACE some-
times extracts two hands although only one hand is visible and vice versa. In such a
case, we regarded ACE could not extract the positions correctly. The position of the
teacher’s face was detected correctly in over 90% of frames, and the position of the
hand was detected correctly in nearly 90% of frames.
Recall ratio means how much ACE extracted the position when we wanted ACE to
extract it in the teacher’s region, is de ned by formula (8). The position of the teacher’s
face and hand were caught in over 90% of frames. The experimental results show that
the position of the teacher’s face and hand are probably detected correctly.
P recision =
number of correct positions
total number of positions extracted by ACE
(7)
Recall =
number of correct positions
total number of positions we wanted ACE to extract
(8)
Result of estimation of teacher’s behavior
Table 5 shows the result of estimation of teacher’s behavior. The behaviors of both
“Writing” and “Explaining” are estimated in over 70%. However, ACE could not esti-
mate the behavior of “Moving” at a high ratio. This is because the behaviors of “Mov-
ing” and “Explaining” are similar in the image sequence, we couldn’t distinguish two
behaviors without the sounds.
The ratio of estimation for the Video 1 is higher than the other videos. This is be-
cause the teacher in the Video 1 is same in the Video A which was used to generate each
model of behavior. Despite of different teacher, the results for the Video 2 and Video 3
are not very low compared to the result of the Video 1.
22
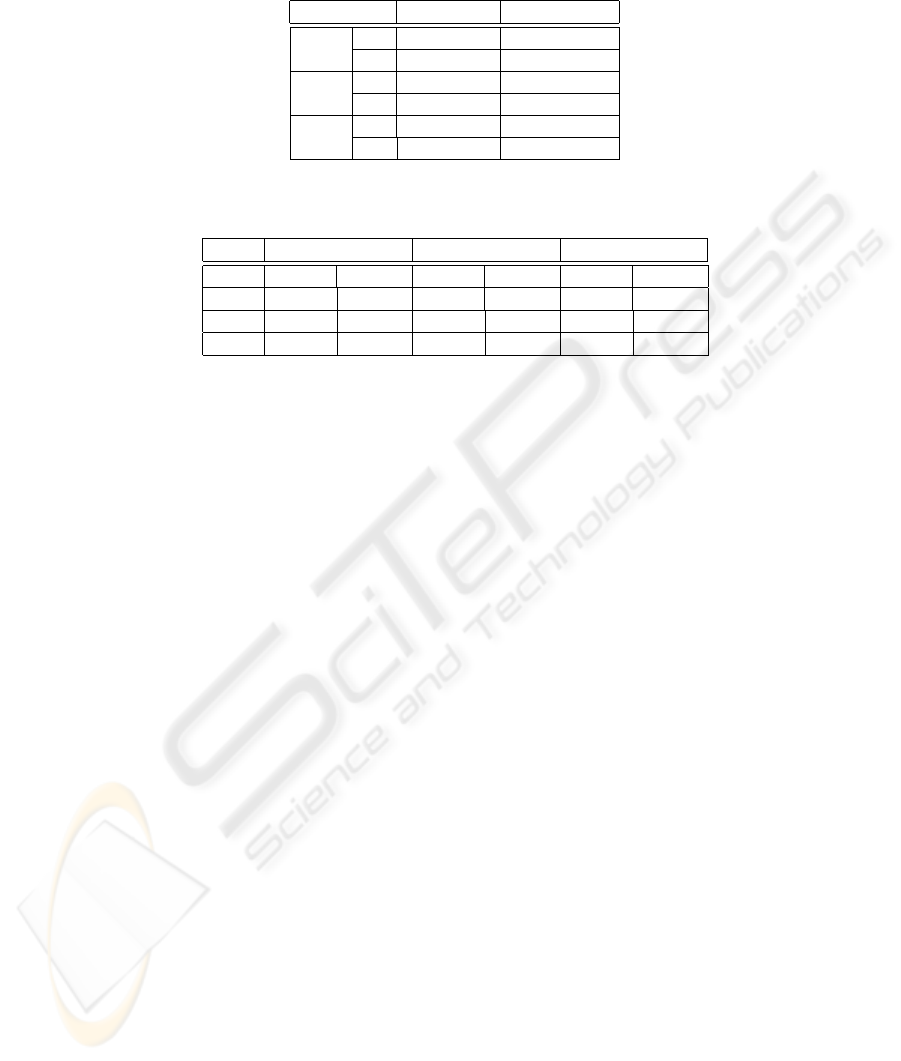
Table 4. The Accuracy of the Position of the Teacher’s Face and Hands Estimated by Our System
Precision (%)
Recall (%)
Video 1
Face
94.3
96.0
Hand
86.2
90.6
Video 2
Face
92.5
98.2
Hand
89.7
93.1
Video 3
Face
93.9
97.5
Hand
87.1
90.5
Table 5. The Result of estimation of teacher’s behavior for each video
Writing
Explaining
Moving
Precision
Recall
Precision
Recall
Precision
Recall
Video 1
81.5
79.2
78.3
76.8
20.5
30.1
Video 2
76.8
79.9
75.7
77.8
17.9
11.6
Video 3
77.9
72.4
80.4
81.7
16.5
13.2
How correctly the ACE find the target to capture the lecture scene?
We show how correctly the ACE find the target to capture the lecture scene in Table 6.
If the area which ACE should focus on at the frame is included in the target area which
ACE found at each frame, we regard the target as appropriate area.
ACE could find the appropriate target at each lecture video even though ACE couldn’t
estimate teacher’s behavior of “Moving” at a high ratio (Table 5). We guess that the be-
havior of “Moving” is less important than that of “Writing” and “Explaining”. The ratio
of the behavior “Moving” is also very low campared with the others “Writing”, “Ex-
plaining” (Table 1). We have designed ACE’s camera work strategy with a focus on the
area explained by the teacher. The area is closely related to the teacher’s behavior of
“Writing” and “Explaining”.
We think that the area which ACE should focus on is consequently included in
the area which ACE found since ACE could find the target area by using the other
parameters p
2
∼ p
5
even if the result of estimation of the teacher’s behavior is wrong at
a frame. In addition, because ACE didn’t change the target area if the estimation result
changes extemporaneously, it could find the target area successfully.
6 Conclusion
We have designed and developed ACE which is a supporting system for a distant lecture.
ACE estimates teacher’s behavior and controls the active camera to take a suitable shot.
We have evaluated ACE with applying it to video lectures. We consequently make sure
that ACE can take a suitable shot for the most part even in a real lecture.
ACE estimate teacher’s behavior (“Writing”, “Explaining” or “Moving”), and find
the target to capture. It cannot distinguish, however, between “Explaining” and “Mov-
ing” proficiently because it is difficult to distinguish even if we see the video without
23

Table 6. How correctly the ACE nd the target to capture the lecture scene?
Success ratio (%)
Video 1
90.7
Video 2
94.3
Video 3
92.1
sounds. Using the sound information of the teacher, ACE could distinguish their two
behaviors and capture more suitable scene. We will make ACE interpret the teacher’s
voice.
References
1.
H.Miyazaki, Y.Kameda, M.Minoh: A Real-time Method of Generating Lecture Video for Mul-
tiple Users Using Multiple Cameras. IEICE, J82-D-II, No.10, pp.1684–1692, 1999
2.
Y.Kameda, K.Ishizuka, and M.Minoh: A Real-time Image Method for Distant Learning Based
on Dynamic Situation Understanding. CVIM, Vol.2000, No.121-11, pp.81–88, 2000
3.
M.Onishi, M.Izumi, and K.Fukunaga: Automatic Production of Video Images for Distance
Learning System Based on Distributed Information. IEICE, J82-D-II, No.10, pp.1590–1597,
1999
4.
M.Onishi, M.Murakami, and K.Fukunaga: Computer-Controlled Camera Work at Lecture
Scene Considering Situation Understanding and Evaluation of Video Imaages. CVIM,
Vol.2001, No.125-5, pp39–46, 2001
5.
A.Suganuma, S.Kuranari, N.Tsuruta, and R.Taniguchi: An Automatic Camera System for Dis-
tant Lecturing System. Conference on Image Processing and Its Applications, Vol.2, pp.566–
570, 1997.
6.
A.Suganuma and S.Nishigori: Automatic Camera Control System for a Distant Lecture with
Videoing a Normal Classroom. World Conference on Educational Multimedia, Hypermedia
& Telecommunications, pp.1892–1897, 2002.
7.
N.Johnson and D.Hogg: Representation and synthesis of behavior using Gaussian mixtures.
Image and Vision Computing 20, pp.889–894, (2002)
8. http://www.sfc.wide.ad.jp/DVTS/index.html
24
