
ADAPTIVE FUZZY SLIDING MODE CONTROLLER FOR THE
SNORKEL UNDERWATER VEHICLE
Eduardo Sebastián
Lab. de Robótica y Exploración Planetaria, Centro de Astrobiología, Ctra. Ajalvir Km.4, Torrejón de Ardoz, Spain
Miguel A. Sotelo
Universidad de Alcalá. Departamento de Electrónica. Ctra. N-II Km. 33. Alcalá de Henares. Madrid, Spain
Keywords: Sliding mode control, fuzzy models, nonlinear control, robots dynamics, marine systems.
Abstract: This paper describes a control system for the kinematic variables of an underwater vehicle. Control of
underwater vehicles is not simple, mainlys due to the nonlinear, coupled and unknown character of system
equations and dynamics. The proposed methodology makes use of a pioneering algorithm implemented for
the first time in an underwater vehicle, and it is based on the fusion of a sliding mode controller and an
adaptive fuzzy system, including advantages of both systems and relaxing the required knowledge of
vehicle model.
1 INTRODUCTION
The adaptive control of nonlinear systems, with
model and parameter uncertainty, has been a focus
of research, in which important progress has been
obtained in the last years (Gee, et al., 1999; Wang,
et al., 2000). Several kinds of control systems for
underwater vehicles have been proposed in the
literature. From sliding controllers (Yoerger and
Slotine, 1991), adaptive nonlinear MIMO controllers
in (Antonelli, et al., 2003; Choi and Yuh, 1996), to
those based on intelligent control (Yuh, 1994;
DeBitetto, 1994). In (Fossen, 1994), the reader can
find a review of some of these methods. In spite of
that, the design of a unique controller for all the
DOF of an underwater vehicle is an area of research
still open (Yuh, 2000).
The controller proposed in this paper is based on
the work and results developed in (Wang, et al.,
2000), about adaptive fuzzy sliding mode control,
spreading the results to a MIMO controller. The
controller performance is analyzed in a practical
application where 4 DOF must be controlled, in the
underactuated UUV, called Snorkel.
The controller is part of a control architecture,
which is based on three chained controllers
(propulsion, kinematic variables and vehicle
guidance), whose goal is to generalize the system
dynamics for their use by the controllers at a higher
hierarchical level (Espinosa, et al., 1999). So the
guidance system, using local environment
information, provides the input references to the
kinematic variables controller, in order to navigate
in a horizontal plane (surge and yaw velocities).
Figure 1: Snorkel robot image
The paper is organized as follows; section 2
introduces the dynamic equations of the Snorkel
underwater vehicle. In section 3 the adaptive fuzzy
sliding mode controller is presented. In section 4 real
test results are presented, and the controller
255
Sebastián E. and A. Sotelo M. (2005).
ADAPTIVE FUZZY SLIDING MODE CONTROLLER FOR THE SNORKEL UNDERWATER VEHICLE.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics, pages 255-259
Copyright
c
SciTePress

performance is described. Finally, section 5
summarizes the results.
2 VEHICLE DYNAMICS
In this work, a Newton-Euler formulation and a non-
inertial reference frame have been selected, as the
method to represent vehicle dynamics (Fossen,
1994). Specifying dynamic equations for the Snorkel
vehicle (1) and its four controllable DOF (surge,
heave, pitch and yaw), and using a change of
variable for the driver vector, allows the designer to
decouple the input control of each thrusters
()
SSSSS
τHτgηgvvDvvCvM =−+++
⋅
)()()(
, (1)
where
M
is the diagonal matrix of inertia (4x4);
)(νD
is a diagonal matrix (4x4) that contains
damping coefficients;
()
S
τg
represents the thrust
perturbation vector of coupled terms(4x1);
)(ηg
is a
vector (4x1) that includes buoyancy and weight
forces;
)(νC
is the Coriolis and centripetal matrix
(4x4);
H
is a diagonal driver matrix (4x4);
ν
is the
velocity vector and
S
ν
is the velocity vector in its
controllable DOF, both relative to fluid and in a
body-fixed frame and
S
τ
is the thrust vector.
2.1 Affine System in Controllability
Canonical Form
In order to develop the controller proposed, the
equations of the vehicle must be expressed in
controllability canonical form. Assuming high
stability in pitch and roll movements, this
representation is possible.
If the change of nomenclature
S
⋅⋅⋅
= vx
and
S
τu =
is done, where x
is the new state vector and
it represents the angular and linear position of the
vehicle in a body-fixed reference frame, the value of
⋅⋅
x
extracted, and system (1) can be represented in
the controllability canonical form.
)2()1(
xx =
⋅
,
() ()
uξgξfx +=
)2(
, (2)
3 ADAPTIVE FUZZY SLIDING
MODE CONTROL
This section studies the properties of the sliding
controller and fuzzy estimators.
3.1 Sliding Mode Controller
Considering the control problem of a system like (2),
and the definition of the sliding surface (3)
xΛxs
~~
+=
⋅
, (3)
where
d
xxx −=
~
,
d
x
is the input reference vector
and
Λ
is a positive definite matrix. The sliding
control theory (Slotine and Li, 1991) proposed the
control law (4), and ensures that after reaching the
surface
0
=s
the system follows the input references
in presence of uncertainties, if
0≥−≤
⋅
ηsηss
TT
.
() () () ( )
⎥
⎦
⎤
⎢
⎣
⎡
−+−−=
⋅⋅⋅
−
s/bηxxΛξfξgu
∆
sat
~
ˆ
ˆ
t
d
1
. (4)
where
[]
T
14
1 ηη
∆
≥
×
,
()
ξg
ˆ
and
()
ξf
ˆ
are a set of
fuzzy estimators of the partially unknown and
nonlinear functions
()
ξf
and
()
ξg
, and
()
s/bsat
is a saturation function that uses a boundary layer
b
,
close to the sliding surface, to eliminate the
chattering effect (Slotine and Li, 1991).
3.2 Fuzzy Adaptive Systems
A fuzzy system may be used like a nonlinear
universal approximator (Wang, et al., 2000), due to
its ability to introduce verbal information, and its
capacity to uniformly approximate any real and
continuous function with different degrees of
precision. So functions
()
ξ
i
f and
()
ξ
i
g , of the i
th
controllable DOF, are parameterized by fuzzy
systems as
()
)(|
ˆ
ξζθθξ
T
fifii
f = , (5a)
()
)(|
ˆ
ξζθθξ
T
gigii
g = , (5b)
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
256
where
() () ()
()
T
m
ζζ ξξξζ ,,
1
K=
is supposed to be
fixed with
()
()
()
∑
∏
∏
=
=
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
m
j
n
i
i
A
n
i
i
A
j
ξµ
ξµ
ζ
j
i
j
i
1
1
1
ξ
,
()
i
A
ξµ
j
i
are
the membership functions of the fuzzy variable
i
ξ ,
and the vectors
T
fi
θ
,
T
gi
θ
are adaptatively tuned
till they reach their optimal value
∗
fi
θ
,
∗
gi
θ
.
3.2.1 Adaptation Law
The adaptive functions will be tuned by the next
parameter adaptation algorithm (Wang, et al., 2000)
() ()
()
⎩
⎨
⎧
≤
>
=∑
=∈
⋅
00
0
|:
2
1
iji
ijiijii
gij
usif
usifusr
gij
ξζ
ξζξζ
θ
θ
, (6a)
()
()
(){}
()
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
>
=
≤
=
<
=∑
>∈
⋅
)0
(
)0
(
)(
|:
2
2
2
i
T
gii
gigi
iii
i
T
gii
gigi
gigi
iii
gi
us
andM
ifusrP
us
andM
orM
ifusr
gij
ξζθ
θ
ξζ
ξζθ
θ
θ
ξζ
θ
θ
, (6b)
()
()
(){}
()
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
>
=
≤
=
<
=∑
⋅
)0
(
)0
(
)(
:
1
1
3
ξζθ
θ
ξζ
ξζθ
θ
θ
ξζ
θ
T
fii
fifi
ii
T
fii
fifi
fifi
ii
fi
s
andM
ifsrP
s
andM
orM
ifsr
, (6c)
where
i
r
1
,
i
r
2
,
fi
M
,
gi
M
are positive constants
specified by the designer,
()
ξζ
j
is the j
th
element of
()
ξζ ,
gij
θ
is the j
th
element of
gi
θ
,
i
s and
i
u are
the values of the sliding surface and the control
action of the
i
th
DOF respectively, and the projection
operators
{}
∗P
are defined as
(){}()
()
2
111
fi
T
fifi
iiiiii
srsrsrP
θ
ξζθθ
ξζξζ −=
and
(){}()
()
2
222
gi
i
T
gigi
iiiiiiii
u
srusrusrP
θ
ξζθθ
ξζξζ −=
.
Theorem (Wang,
et al., 2000) For a nonlinear
system (2), consider the controller (4). If the
parameter adaptation algorithm (6) is applied, then
the system can guarantee that: (a) the parameters are
bounded, and (b) closed loop signals are bounded
and tracking error converges asymptotically to zero
under the assumption of a fuzzy integrable
approximation error.
The proof of s ,
fi
θ
and
gi
θ
boundedness for a
SISO system is shown in (Wang,
et al., 2000), and
similar results could be obtain for the case of MIMO
systems, like those presented in (4).
4 TEST RESULTS
In this section, the results of a real test are presented
in order to show the controller ability to adapt the
unknown vehicle dynamic parameters. The test has
been carried out in a small tank of 1.8m of diameter
and 2m of depth, by using the Snorkel vehicle with
its sensorial an electronic architecture (Sebastian,
2005). Therefore vehicle movements have been
limited to yaw rotation, making surge and heave
velocities equal to zero. Based on these limits, the
test only studies the controller behaviour in yaw
movement (
r velocity); however the results can be
extended to any other DOF. Finally, it is necessary
to point out that the controller equations have been
implemented in the vehicle’s main CPU, so a digital
version of them with an Euler integration algorithm
and a sample period of 100msec has been used.
Prior to developing the test, it is necessary to
establish the controller constants based on the
theoretical vehicle model (Fossen, 1994) and the
boundaries in the parameters uncertainties
(Sebastian, 2005). This is the case of the sliding
control parameters and the thickness of the boundary
layer
b
r
(yaw movement), that have been
experimentally fixed.
Table 1: Sliding control parameters
PARAMETER VALUE
Λ
diag[0.3 0.15 0.3 0.3]
∆
η
diag[0.38 0.13 0.19 0.55]
b
r
1.75
Likewise, the gaussian membership functions
associated with each fuzzy estimator have to be
defined. Thus, for yaw DOF dependencies have been
established.
()
)u(),r(ff
ˆ
AAr
1
µµ=
,
(
)
)r(fg
ˆ
2
Ar
µ=
(7)
ADAPTIVE FUZZY SLIDING MODE CONTROLLER FOR THE SNORKEL UNDERWATER VEHICLE
257
In table 2, the value of the membership functions
parameters can be seen. These functions have to
cover all the dynamic range of the kinematic
variable, with a certain degree of intersection.
Table 2: Description of membership functions
VARIABLE
MEMBERSHIP
FUNCTION CENTERS
TYPICAL
DEVIATION
)r(
1
A
µ
[-.7 –.35 0 .35 .7]rad/sec 0.17rad/sec
)r(
2
A
µ
[-.7 0 .7]rad/sec 0.35rad/sec
)u(
A
µ
[-.5 0 .5]m/sec 0.25m/sec
Additionally, the initial values of functions
r
f
ˆ
and
r
g
ˆ
have to be fixed. The initial values of the
fi
θ
parameters have been initialized to zero, in
order to check adaptation capabilities, while
gi
θ
parameters are set to values that have been obtained
based on the vehicle theoretical model (Sebastian,
2005). Finally, some additional constants that
determine adaptation behaviour have to be set up,
table 3. These constants define functions
r
f
ˆ
and
r
g
ˆ
boundaries, determining the system capability to
absorb model perturbations and parameters
uncertainties.
Table 3: Adaptive fuzzy control parameters
PARAMETER M
fr
M
gr
ε
r
r
1r
r
2r
VALUE
2·
max
r
f
ˆ
=1.066
2·
r
g
ˆ
=0.035
r
g
ˆ
/2
=0.0088
10 0.005
To carry out the test a square wave input
reference of 10º/sec of amplitude and 40sec of
period has been used. This input is modified by a
first order linear model of reference with a time
constant of 1.6sec. The estimation process is kept
active thanks to this reference.
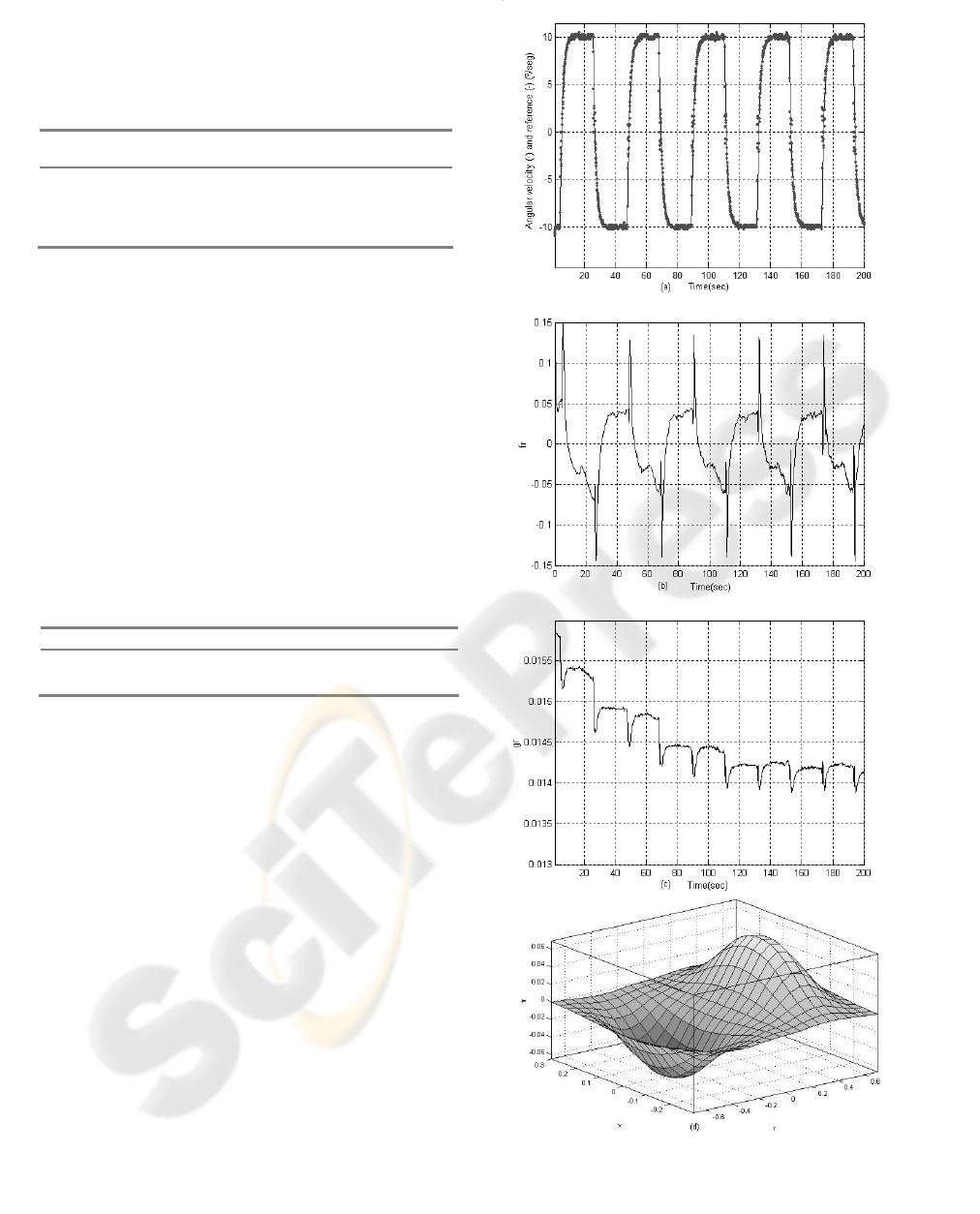
After an analysis of the figures, it could be said
that the tracking of input reference is almost perfect,
in spite of the oscillatory behaviour caused by
sensors noise. The estimation of the
r
f
ˆ
function is
stable during the test, but some peaks can be
observed, whose origin is the oscillatory output
around null values of yaw velocity. This effect can
be caused by the on line offset adjust algorithm of
gyroscopes signals, or by the external system that
ensures the correct position of the robot in the
middle of the tank. In the same way the estimation
of the
r
g
ˆ
function reaches a stable value over the
minimum established. The response shows a certain
degree of oscillation, which tries to make the value
of the sliding surface equal to zero.
Figure 2: Yaw velocity control test. (a)Yaw velocity (·)
and reference (-), (b)
r
f
ˆ
evolution, (c)
r
g
ˆ
evolution and
(d)3D representation of
r
f
ˆ
.
ICINCO 2005 - INTELLIGENT CONTROL SYSTEMS AND OPTIMIZATION
258

Finally, the 3D representation of
r
f
ˆ
shows the
capability of the system to estimate vehicle
dynamics, and at the same time, the lack of
adaptation for big values of
r and non null values of
u, because the controller has not been tested for
them.
5 CONCLUSIONS
The adaptive fuzzy sliding mode controller is a valid
method to control underwater vehicles, being
capable of incorporating the dynamic problems of
this type of system, generating designs easily
implementable and interpretable, at a reasonable
control effort. The theoretical and practical stability
of the controller has been demonstrated, ensuring
system convergence through reference. Additionally
it takes into consideration the nonlinearity of the
system and it is capable of adapting to parameters
and model uncertainty.
The control proposed can be considered as a
combination of an adaptive and robust system. Thus,
it has the advantages of both systems. Robust
behaviour against fast parameter variation, against
perturbations and against noise in the state
measurement, are characteristics of the sliding part.
On the other hand, no requirement of prior and
precise knowledge of uncertainty or its boundaries,
and the capability of improving output performance
after adaptation, are characteristics of the adaptive
part.
The control proposed allows the designer to
relax the design conditions of the sliding part, due to
the capabilities of the adaptive one to estimate and
absorb uncertainties and perturbations. This fact
makes possible a reduction in discontinuous control
gain, decreasing the chattering the effect.
As a future work, several tests with combined
input references and comparisons between the
proposed method and existing methods must be
carried out. Additionally, tests using the guidance
controller have to be developed in order to shown
the architecture performance (Sebastian, 2005).
REFERENCES
Antonelli G., Caccavale F., Chiaverini S. and Fusco G.
2003. A Novel Adaptive Control Law for Underwater
Vehicles.
IEEE Transactions on Control Systems
Technology,
11(2), 109-120.
Choi, S.K. and Yuh, J., 1996. Experimental study on a
learning control system with bound estimation for
underwater vehicles,
International Journal of
Autonomous Robots, 3
(2/3), 187-194.
DeBitetto, P.A., 1994. Fuzzy logic for depth control for
unmanned undersea vehicles,
Symposium of
Autonomous Underwater Vehicle Technology.
Cambridge, MA, 233-241.
Espinosa F., López E., Mateos R., Mazo M. and García R.
1999. Application of advanced digital control
techniques to the drive and trajectory tracking systems
of a wheelchair for the disabled.
Emerging
Technologies and Factory Automation,
Barcelona,
521-528.
Fossen, T. I., 1994
Underwater vehicle dynamics. Baffins
Lane, Chichester, John Wiley & Sons Ltd.
Gee S.S., Hang C.C. and Zhang T. 1999. A direct method
for robust adaptive nonlinear with guaranteed transient
performance.
Systems and Control Letters, 37, 275-
284.
Sebastián, E. 2005.
Control y navegación semi-autónoma
de un robot subacuático para la inspección de
entornos desconocidos
. Doctoral diss., Universidad de
Alcalá, Madrid.
Slotine, J.J. and Li W., 1991.
Applied nonlinear control.
Englewood Cliffs. Prentice Hall.
Wang, J. , Get S.S. and Lee T. H., 2000. Adaptive Fuzzy
Sliding Mode Control of a Class of Nonlinear
Systems.
3
rd
Asian Control Conference, Shanghai.
599-604.
Yoerger, D.R. and Slotine J.E., 1991. Adaptive sliding
control of an experimental underwater vehicle.
IEEE
International conference on Robotics and Automation,
Sacramento. CA. 2746-2751.
Yuh, J., 1994. Learning control for Underwater Robotics
Vehicles.
IEEE Control System Magazine.14(2) 39-46.
Yuh J. 2000. Design and Control of Autonomous
Underwater Robots: A Survey.
Autonomous Robots, 8,
7-24.
ADAPTIVE FUZZY SLIDING MODE CONTROLLER FOR THE SNORKEL UNDERWATER VEHICLE
259
