
PREVISE
A Human-Scale Virtual Environment with Haptic Feedback
Françoix-Xavier Inglese
1
, Philippe Lucidarme
2
, Paul Richard
1
, Jean-Louis Ferrier
1
1
Laboratoire d’Ingéniérie des Systèmes Automatisés FRE 2656 CNRS, AngersUniversity,
62 Avenue Notre-Dam. du Lac, Angers, France
2
IUT d’Angers, 4, Bd Lavoisier, BP 42018, 49016, Angers Cedex
Keywords: Virtual reality, virtual environment, human-scale, haptic, application.
Abstract: This paper presents a human-scale multi-modal virtual environment. User interacts with virtual worlds using
a large-scale bimanual haptic interface called the SPIDAR-H. This interface is used to track user’s hands
movements and to display various aspects of force feedback associated mainly with contact, weight, and
inertia. In order to increase the accuracy of the system, a calibration method is proposed. A large-scale
virtual reality application was developed to evaluate the effect of haptic sensation in human performance in
tasks involving manual interaction with dynamic virtual objects. The user reaches for and grasps a flying
ball. Stereoscopic viewing and auditory feedback are provided to improve user’s immersion
1 INTRODUCTION
Virtual Reality (VR) is a computer-generated
immersive environment with which users have real-
time interactions that may involve visual feedback,
3D sound, haptic feedback, and even smell and taste
(Burdea, 1996 ; Richard, 1999 ; Bohm, 1992 ;
Chapin, 1992 ; Burdea, 1993 ; Sundgren, 1992 ;
Papin, 2003). By providing both multi-modal
interaction techniques and multi-sensorial
immersion, VR presents an exciting medium for the
study of human behavior and performance.
However, large-scale multi-modal Virtual
Environments (including haptic feedback) are few
(Richard, 1996 ; Bouguila, 2000).
Among the many interaction techniques developed
so far, the virtual hand metaphor is the most suited
for interaction with moving virtual objects
(Bowman, 2004). In this context tactual feedback is
an important source of information.
Therefore, we developed a human-scale Virtual
Environment (VE) based on the SPIDAR-H haptic
interface. In order to increase the accuracy of the
system, a calibration method is proposed. A large-
scale virtual reality application was developed to
evaluate the effect of haptic feedback on human
performance in tasks involving manual interaction
with dynamic virtual objects. In the next section, we
describe the multi-modal human-scale virtual
environment. Then we describe the proposed
calibration method. Finally, the virtual ball catching
application is described.
2 HUMAN-SCALE VE
2.1 Description
Our multi-modal VE is based on the SPIDAR
interface (Figure 1). In this system, a total of 8
motors for both hands are placed as surrounding the
user (Sato, 2001). Motors set up near the screen and
behind the user; drive the strings (strings between
hands and motors) attachments. One end of string
attachment is wrapped around a pulley driven by a
DC motor and the other is connected to the user’s
hand.
By controlling the tension and length of each
string attachment, the SPIDAR-H generates an
appropriate force using four string attachments
connected to a hand attachment. Because it is a
string-based system, it has a transparent property so
that the user can easily see the virtual world. It also
provides a space where the user can freely move
around. The string attachments are soft, so there is
no risk of the user hurting himself if he would get
entangled in the strings. This human-scale haptic
140
Inglese F., Lucidarme P., Richard P. and Ferrier J. (2005).
PREVISE - A Human-Scale Virtual Environment with Haptic Feedback.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 140-145
DOI: 10.5220/0001167401400145
Copyright
c
SciTePress

device allows the user to manipulate virtual objects
and to naturally convey object physical properties to
the user’s body. Stereoscopic images are displayed
on a retro-projected large screen (2m x 2,5m) and
viewed using polarized glasses. A 5.1 immersive
sound system is used for simulation realism,
auditory feedback and sensorial immersion.
Olfactory information can be provided using a
battery of olfactory displays.
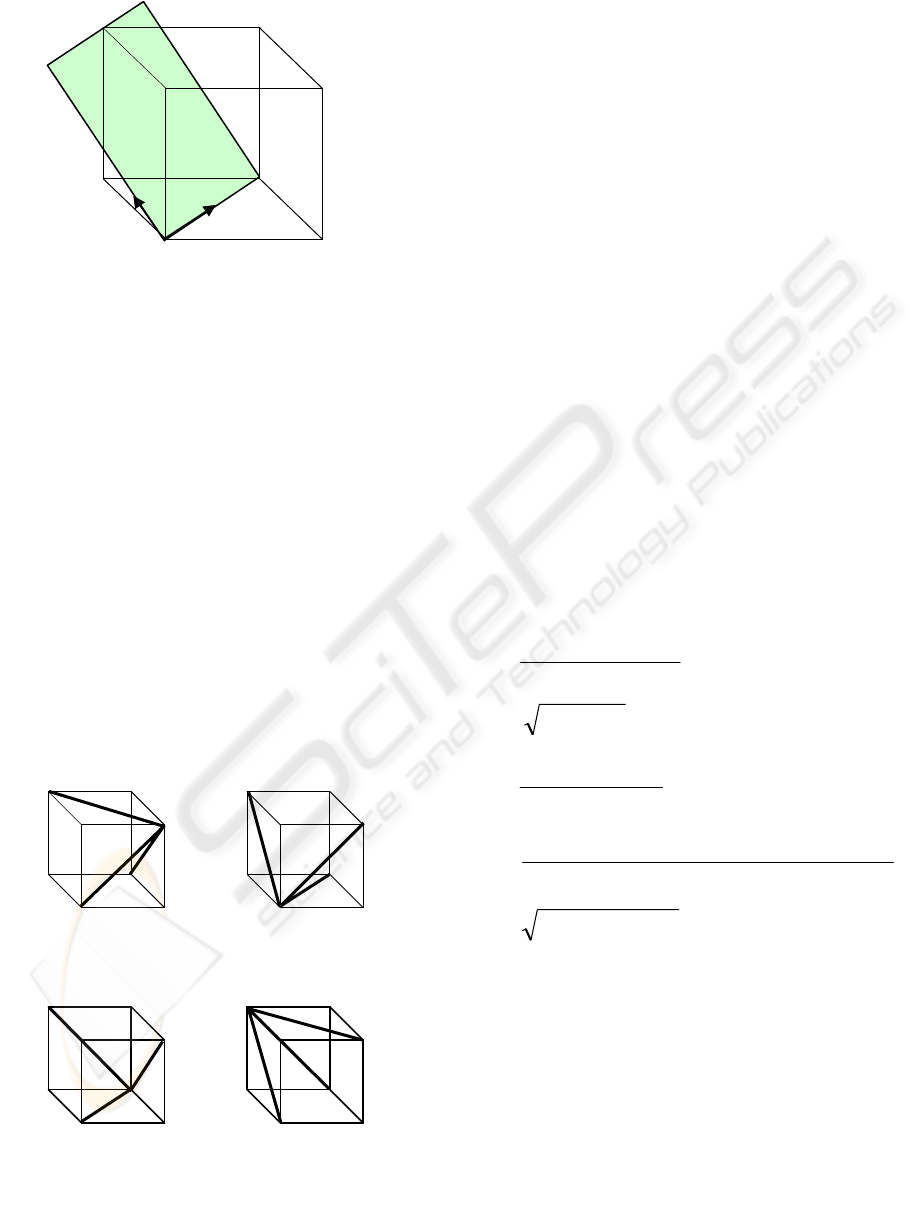
2.2 VE Workspace
Workspace is a well-know concept in robotics. The
workspace of a robot is the minimum space that
contains all the reachable positions of the end-
effector. In the case of the SPIDAR-H, the
workspace is also an important concept. This
workspace is divided in two spaces:
Reachable space : as defined by Tarrin and al. in
(Tarin, 2003) “The reachable space gather every
points users can reach with hands”
Haptic space: gather every point where the
system can produce a force in any direction.
The global workspace is defined by the
intersection of these two spaces. The figures 2.a and
2.b show the workspace of the reachable space; the
volume is mixed up with the frame of the SPIDAR.
The figures 2.c and d. show the haptic space. In
(Tarin, 2003), the authors consider that the
manipulation space is defined by the intersection of
right and left hand workspace, i.e. the intersection of
the four spaces described on figure 2. This
hypothesis is only true when the two hand
attachments are linked together (for position and
orientation for example as in SPIDAR-G (Kim,
2002)). In the following, hands are not linked; we
differentiate the spaces for right and left hand.
Note that the haptic space is described by a
tetrahedron. This shape is a theoretical workspace, in
practice; the real workspace is smaller than this
shape. Besides, the faces of the tetrahedron are not
included in the workspace. It seems natural that
when the hand attachment is located on the face, a
force can not be produced in any direction outside of
the space. To generalize, when the hand attachment
is close to the centre of the tetrahedron, the
SPIDAR-H is more efficient (it can produce an
important force in any direction).
In the following, we consider that the workspace is
approximately defined by the space described by
figures 2.c. and 2.d.
Encode
r
Pulley
Strin
g
s
Figure 1: Framework of the SPIDAR-H
DC Moto
r
(c) (d)
1
23
4
5
67
8
1
2 3
4
5
6 7
8
1
23
4
5
67
8
1
2 3
4
5
6 7
8
(a) (b)
Figure 2: reachable and haptic space of the SPIDAR-H.
(a. right hand reachable space, b. left hand reachable
space, c. right hand haptic space and d. left hand haptic
space)
PREVISE - A Human-Scale Virtual Environment with Haptic Feedback
141
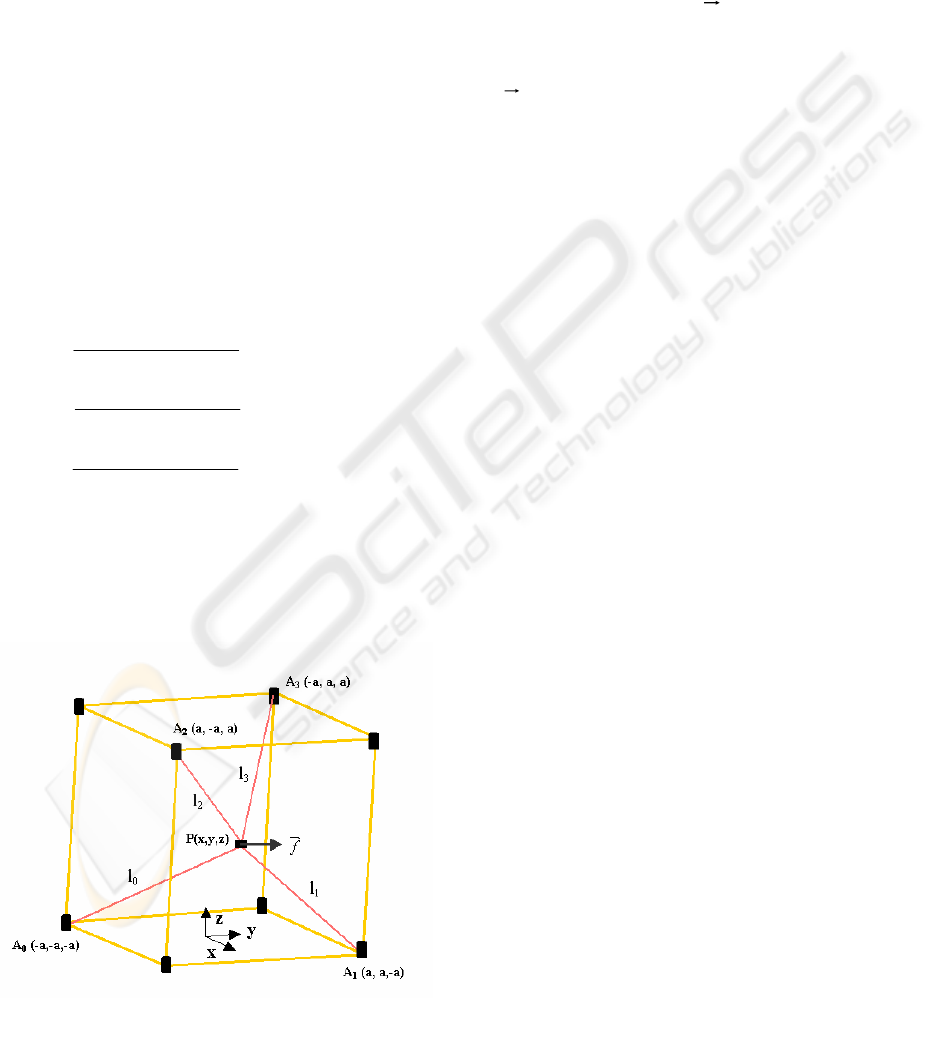
2.3 Position measurement
Let the coordinates of the hand attachment position
be P(x,y,z), which represent in the same time the
hand position, and the length of the i
th
string be li
(i=0, ..., 3). To simplify the problem, let the four
actuators (motor, pulley, encoder) Ai be on four not
adjacent vertexes of the cubic frame, as shown on
figure 3. Then P(x,y,z) must satisfy the following
equations (1-4).
After substracting the respective adjacent equations
among equation (1)-(4) and solve the simultaneous
equations, we can obtain the position of a hand
attachment (hand) as the following equation (5):
The coordinates origin is set to the centre of the
framework. The position measurement range of all
x, y, and z in [-1.25m, +1.25m]. The absolute static
position measurement error is less than 1.5cm inside
the position measurement range.
2.4 Force control
SPIDAR-H uses the resultant force of tension from
strings to provide force display. As the hand
attachment is suspended by four strings, giving
certain tensions to each of them by the mean of
motors, the resultant force occurs at the position of
the hand attachment, where transmitted to and felt
by the operator’s hand.
Let the resultant force be f and unit vector of the
tension be
i
u
G
(i=0,1,2,3), the resultant force is :
Where a
i represents the tension value of each
string attachment. By controlling all of the a
i ,a
resultant force in any direction can be composed.
2.5 Calibration method
As the workspace, calibration is also a well-known
concept in robotics. Calibration is a technique that
computes all the parameters of a robot, for example
the length of the links between two axes. On real
robots, this technique generally requires an external
measurement device that provide the absolute
position of the end-effector (coordinate
measurement machinery, theodolites). Unlike robots,
the SPIDAR-H can be calibrated without external
system according to the following hypothesis:
• The parameters to calibrate are the position
of each motor.
• The exact length of each string is known at
any time.
• The strings are long enough to reach any
motor.
• The junction of the string is considered as a
point.
In order to complete the calibration, it is
necessary to set the position and orientation of the
original frame. We have no warranty that the motors
are placed exactly on the corner of the cube, so,
taking the cube as original frame may be a wrong
hypothesis. Let’s define a new frame independent
from the cube. The origin of the frame is located on
motor 4. Concerning the orientation of the frame, we
arbitrary fixed the following relationship:
• the v axis is given by the vector [motor4 –
motor2],
• the plan v-w passes though motor 7.
Figure 3: Position measurement and resultant force
)4()²()²()²(²
)3()²()²()²(²
)2()²()²()²(²
)1()²()²()²(²
3
2
1
0
azayaxl
azayaxl
azayaxl
azayaxl
−+−++=
−+++−=
++−+−=
+
+
+++=
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
−−+
=
−+−
=
+−−
=
a
llll
z
a
llll
y
a
llll
x
8
²)²²²(
)5(
8
²)²²²(
8
²)²²²(
3210
3210
3210
)0(
3
0
〉=
∑
=
ii
i
i
auaf
G
ICINCO 2005 - ROBOTICS AND AUTOMATION
142
The figure 4 illustrates the position and orientation
of the frame. According to the previous
relationships, the position of each motor can be
defined by:
The first phase of calibration consists in positioning
the end-effector of the SPIDAR-H at some positions
called “exciting positions”. Figure 5 shows the 4
exciting positions.
Each position produces 3 data: the length of the
three strings:
• Position A
2
(a) gives l
45
, l
25
and l
57
,
• Position A
0
(b) gives l
42
, l
47
and l
45
,
• Position A
1
(c) gives l
42
, l
25
and l
27
,
• Position A
3
(d) gives l
47
, l
27
and l
57
.
Where l
ij
is the distance between motor i and
motor j. These lengths provide the six equations of
the following system where v
2
, v
7
, w
7
, u
5
, v
5
and w
5
are the six parameters to calibrate.
The system is solvable and provides the following
parameters:
Theses results prove that the SPIDAR-H can be
calibrated without external system. The correctness
of this demonstration was confirmed by simulations.
Note 1: if the position and orientation of any motor
is known in an external frame, it becomes easy to
transfer the position of each motor in this new
external frame.
Note 2: if a high accuracy is needed, last square
methods can be used (each length is measured at
least two times: l
45
is given by positions a. and b.).
2
5
7
4
v
w
Figure 4: position and orientation of the original
frame
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
0
0
0
:4Motor
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
0
0
:2
2
vMotor
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
7
7
0
:7
w
vMotor
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
5
5
5
:5
w
v
u
Motor
2
4
5
7
2
4
5
7
2
4
5
7
2
4
5
7
(a) (b)
(c) (d)
Figure 5: exciting positions
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
−+−+=
+−+=
+−=
++=
+=
=
)²()²(²²
²)²(²²
²)²(²
²²²²
²²²
²²
5757575
525525
72727
55545
7747
242
wwvvul
wvvul
wvyl
wvul
wvl
vl
²²
7177
vlw −=
2
21727
7
2
²²²
v
vll
v
+
+
−
=
422
lv
=
2
22545
5
2
²²²
v
vll
v
+
−
=
7
725577525
5
2
²)²()²(²²
w
wvvvvll
w
+
−−
−
+
−
=
²²²
55157
wvlu −−=
PREVISE - A Human-Scale Virtual Environment with Haptic Feedback
143
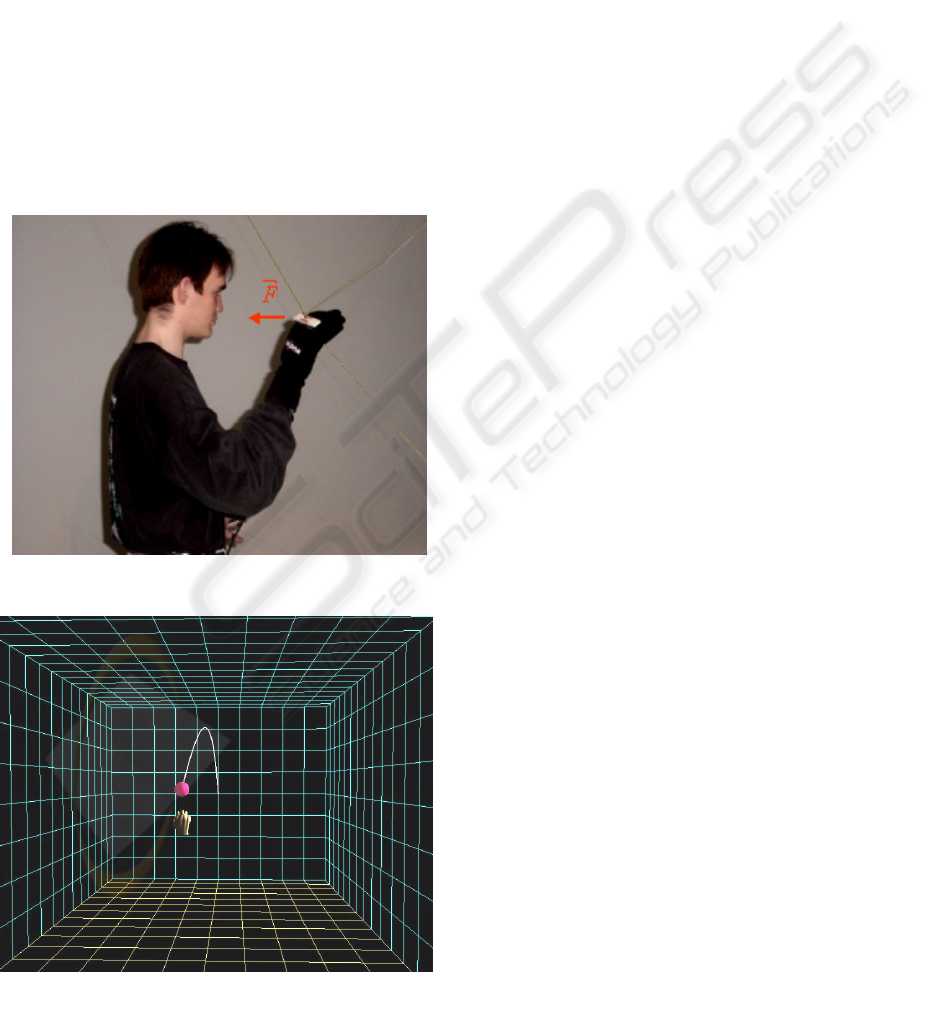
3 VIRTUAL CATCH BALL
The virtual catch ball application was developed for
human performance evaluation in tasks involving
reaching and grasping movements towards flying
virtual objects. Such experimental paradigm has
been used in many studies (Bideau, 2003 ; Zaal,
2003 ; Richard, 1994). However, a few of these
involve haptic feedback (Richard, 1998 ; Jeong,
2004). In our application, the user catches a flying
ball using a data glove (NoDNA) integrated in the
SPIDAR interface. The user could therefore feel the
ball hitting his/her virtual hand. A user catching a
virtual ball is shown on Figure 6. A snapshot of the
ball catching environment is illustrated in Figure 7.
The catch ball simulation was developed in C/C++.
OpenGL Graphics Library (Woo, 1999) was used as
well as some video games tools and tutorials (Astle,
2001).
4 CONCLUSION AND FUTURE
WORK
We present a human-scale multi-modal virtual
environment with haptic feedback. The user interacts
with virtual worlds using a large-scale bimanual
haptic interface called the SPIDAR-H. This interface
is used to track user’s hands movements and to
display various aspects of force feedback associated
mainly with contact, weight, and inertia. In order to
increase the accuracy of the system, a calibration
method is proposed. A virtual reality application was
developed. The user reaches for and grasps a flying
ball. Stereoscopic viewing and auditory feedback are
provided to improve user’s immersion.
In the near future, human performance evaluation
involving ball catching tasks will be carried out.
Moreover, the developed VE will serve as an
experimental test-bed for the evaluation of different
interaction techniques.
REFERENCES
G. Burdea, Ph. Coiffet., and P. Richard, ”Integration of
multi-modal I/Os for Virtual Environments”,
International Journal of Human-Computer Interaction
(IJHCI), Special Issue on Human-Virtual Environment
Interaction, March, (1), pp. 5-24, 1996.
P. Richard, and Ph. Coiffet, ”Dextrous haptic interaction
in Virtual Environments: human performance
evaluation”, Proceedings of the 8th IEEE International
Workshop on Robot and Human Interaction, October
27-29, Pisa, Italy, pp. 315-320, 1999.
K. Bohm, K. Hubner, and W. Vaanaen, ”GIVEN: Gesture
driven Interactions in Virtual Environments. A Toolkit
Approach to 3D Interactions”, Proceedings Interfaces
to Real and Virtual Worlds, Montpellier, France,
March, pp. 243-254, 1992.
W. Chapin, and S. Foster, “Virtual Environment Display
for a 3D Audio Room Simulation”, Proceedings of
SPIE Stereoscopic Display and Applications, Vol.12,
1992.
G. Burdea, D. Gomez, and N. Langrana, , ”Distributed
Virtual Force Feedback”, IEEE Workshop on Force
Display in Virtual Environments and its Application to
Robotic Teleoperation, Atlanta, May 2, 1993.
H. Sundgren, F. Winquist, and I. Lundstrom, “Artificial
Olfactory System Based on Field Effect Devices”,
Proceedings of Interfaces to Real and Virtual Worlds,
Montpellier, France, pp. 463-472, March. 1992.
J-P. Papin, M. Bouallagui, A. Ouali, P. Richard, A. Tijou,
P. Poisson, W. Bartoli, ”DIODE: Smell-diffusion in
real and virtual environments”, 5th International
Fi
g
ure 6: A user catchin
g
a virtual fl
y
in
g
ball
Fi
g
ure 7: Sna
p
shot of the ball catchin
g
worl
d
ICINCO 2005 - ROBOTICS AND AUTOMATION
144

Conference on Virtual Reality (VRIC 03), Laval,
France, pp.113-117, May 14-17, 2003.
Bowman, D.A., Kruijff, E., LaViola, J.J., and Poupyrev, I.,
3D User Interfaces: Theory and Practice, Addison
Wesley / Pearson Education, Summer 2004.
Richard P., Birebent G., Burdea G., Gomez D., Langrana
N., and Coiffet Ph., (1996) "Effect of frame rate and
force feedback on virtual objects manipulation",
Presence - Teleoperators and Virtual Environments,
MIT Press, 15, pp. 95-108.
L. Bouguila, M. Ishii, M. Sato, “A Large Workspace
Haptic Device For Human-Scale Virtual
Environments”, Workshop on Haptic Human-
Computer Interaction, Scotland, 2000
Sato, M. “Evolution of SPIDAR”, 3
rd
International Virtual
Reality Conference (VRIC 2001), Laval, May, France.
N. Tarrin, S. Coquillart, S. Hasegawa, L. Bouguila, M.
Sato, “The sthand attachmented haptic workbench: a
new haptic workbench solution” Eurographics 2003, P.
Brunet and D. Fellner, vol. 22, Number 3.
S. Kim, S. Hasegawa, Y. Koike, M. Sato, “Tension based
7-DOF force feedback device: SPIDAR-G”, Proc. of
the IEEE Virtual Reality 2002.
B. Bideau, R. Kulpa, S. Ménardais, L. Fradet, F. Multon,
P. Delamarche, B. Arnaldi, “Real handball goalkeeper
vs. virtual handball thrower”, Presence: Teleoperators
and Virtual Environment, 12:4 (August 2003), Fourth
international workshop on presence, pp. 411 - 421
F. T. J. M. Zaal, & C. F. Michales, “The Information for
Catching Fly Balls: Judging and Intercepting Virtual
Balls in a CAVE”, Journal of Experimental
Psychology: Human Perception and Performance,
2003, 29:3, pp. 537-555
Richard P., Burdea G., and Coiffet Ph., (1994) "Effect of
graphics update rate on human performance in a
dynamic Virtual World", Proceedings of the Third
International Conference on Automation Technology
(Automation' 94), July, Taipei, Taiwan, Vol. 6. pp.1-5.
Richard P., Hareux Ph., Burdea G., and Coiffet Ph.,
(1998) "Effect of stereoscopic viewing on human
tracking performance in dynamic virtual
environments", Proceedings of the First International
Conference on Virtual Worlds (Virtual
Worlds'98), International Institute of Multimedia, July
1-3, Paris, France, LNAI 1434, pp. 97-106
Jeong S., Naoki H., Sato M., “A Novel Interaction System
with Force Feedback between Real and Virtual
Human”, ACM SIGCHI International Conference on
Advances in Computer Entertainment Technology ACE
2004, Singapore, June 2004
NoDNA, http://www.nodna.com
M. Woo, J. Neider, T. Davis, D. Shreiner., ”OpenGL(R)
Programming Guide : The Official Guide to Learning
OpenGL”, Version 1.2 (3rd Edition), OpenGL
Architecture Review Board, Addison-Wesley Pub Co;
3rd edition ; ISBN: 0201604582, 1999.
Astle, K. Hawkins A. LaMothe, ”OpenGL Game
Programming” Game Development Series, Premier
Press, ISBN: 0761533303, 2001.
PREVISE - A Human-Scale Virtual Environment with Haptic Feedback
145
