
Sub Auditory Communication and Facial EMG
Sanjay Kumar, Dinesh Kant Kumar and Melaku Alemu
School of Electrical and computer Engineering RMIT university Melbourne
Abstract. Availability of speech related information in the facial EMG is
discussed. The primary objective of this preliminary work is to investigate the
use of facial EMG as a voiceless communication medium. Subjects were asked
to utter the five English vowels with no acoustic output (sub-auditory). Three
independent EMG signals were acquired from three facial muscles as sub-
auditory EMG activations. In order to classify and recognize each vowel based
on EMG, RMS of the recorded signals were estimated and used as parametric
inputs to a neural network.
1 Introduction
Electromyography (EMG) is the recording of the electrical activity of muscles. The
electrical signal is a result of the combination of action potentials during contracting
muscle fibers. EMG can be performed using invasive or non-invasive electrodes.
Surface Electromyogram (SEMG), the electrical potential recorded non-invasively
from the surface of the skin, can be used to identify the overall strength of contraction
of muscles. Root mean square (RMS) of SEMG is a good indicator of that strength.
Besides clinical applications, SEMG has been used as a control signal in prosthetic
devices dating back in the 1970 [1].
Speech has been modelled by the source and filter. The filter of sound is a result of
the mouth cavity and lips and results in giving the spectral content to the sound.
Vowels are sounds that are relatively stationary while consonants are produced by
dynamic variation of the filter characteristics. The shape of the lips and mouth cavity
is controlled by the contraction of the corresponding muscles.
Based on the above, it is stated that speech produced by any person is dependent on
the activity of the facial muscles controlling the shape of the mouth and lips.
Extracting speech related information from facial muscle activities has a number of
applications. People with speech related disabilities such as vocal cord damage can be
offered the possibility of communicating with others via machines with facial EMG
being used as a control signal. EMG, since it is immune from ambient noise, can also
provide an alternative communication system in a noisy environment. Even so the
application of EMG in speech research is not new, few work is reported in the
literature where the above-mentioned applications are effectively realised.
Morse et al [1] have reported the use of EMG recorded from the neck and temple
to analyse feasibility of using neural networks to recognize speech. Their parametric
input to the neural network was the power spectral density of the EMG activated and
Kumar S., Kant Kumar D. and Alemu M. (2005).
Sub Auditory Communication and Facial EMG.
In Proceedings of the 1st International Workshop on Biosignal Processing and Classification, pages 142-149
DOI: 10.5220/0001193301420149
Copyright
c
SciTePress

recorded while subjects quasi-randomly spoke words. They report a very low overall
accuracy of approximately 60% for the recognition of the signal [1]. A.D.C. Chan et
al, report the use of facial EMG with linear discriminate analysis to recognize 10
separate numbers with a recognition accuracy of over 90% [2]. However H. Manabe
et al [3], have observed language dependent nature of the Chan et al’s work as a
drawback and suggested the use of phonemes based recognition method [3]. Sugie et
al [4] report the use of EMG for identifying the phonemes during the subject speaking
five Japanese vowels but report a low accuracy of 60%. Other researchers such as C
Jorgensen et al [5] have demonstrated possible application of EMG signal recorded
from the Larynx and sublingual areas from below the jaw in speech recognition
particularly for silent or sub-auditory speech. Using neural networks with a
combination of feature sets, they have shown the potential of sub-acoustic speech
recognition based on EMG with up to 92% accuracy.
From the literature reported, there appears to be a discrepancy of the reliability of
EMG of the facial muscles to identify speech. Thus, there is a need to determine if the
use of EMG to identify muscle activity to produce simple sub-auditory sounds is
reliable and reproducible which would then be the basis for a more complex study.
With that aim, this paper reports our work conducted to identify certain common
sounds using surface EMG under controlled conditions.
2 Background
2.1 English Vowels
English vowels are speech gestures that represent stationary filter characteristics with
no nasal involvement [11]. Based on this, it is argued that the mouth and lips shape
would remain stationary during the pronunciation of the vowels and hence the muscle
contraction during the utterance of the vowels would remain stationary. Utterance of
consonants would result in temporal variation of shape and thus changing muscle
contraction for the duration of the utterance. For this reason, this research has
considered five English vowels. This is also important since English vowels are
building blocks in modern speech. By including temporal variation, this can then be
extended to consonants.
2.2 Speech Production and Facial EMG
The process of human speech is complex with the involvement of number of muscles.
All facial muscles that are involved in pursing the lips, lifting the corners of the
mouth and opening the jaw are activated during speech. A number of these muscles
are not close to the surface making non-invasive EMG recording impossible. Further,
to record EMG from each of these muscles would be extremely clumsy making it
extremely uncomfortable for the human participants. Thus it is necessary to identify
the most suitable muscles that can be used to identify the different vowels. Three
facial muscles were identified that are more active when subjects attempt to
pronounce the five vowels. For this aim, three facial muscles were selected. These
143

include Mentalis, Depressor Anguli Oris and Massetter. The Mentalis originates from
the mandible and inserts into the skin of the chin to elevate and protrude lower lip,
pull chin skin into a pout. The Depressor anguli oris originates from the mandible and
inserts skin at angle of mouth pulls corner of mouth downward. Masseter originates
from maxilla and zygomatic arch and inserts to ramus of mandible to elevate and
protrude, assists in side-to-side movements of mandible.
2.3 EMG Feature Extraction and Classification
Muscle contraction is a result of electrical stimulation received from the nerves to
individual muscle fibers. This results in electrical activity that can be recorded by
electrodes kept in the close proximity of the muscles. This recording is called EMG.
The signal is a summation of number of motor unit action potentials that are spatially
and temporally separated. The signal is complex and non-stationary, it is bi-phasic
and cannot be represented by a simple mathematical function.
The force produced by contraction of muscles depends on the number of active
muscle fibers and the rate of activation of these fibers. Zero- crossing and spectral
analysis provide an indication of the rate of activation of the muscle fibers and the
density of muscle fibers that are being activated. The amplitude of EMG is an
indicator for the size of active motor units and the integrated EMG and the RMS–
EMG are indicators of rate (density) of activation as well as the number of active
motor units and the size of these motor units. RMS of EMG highlights the ‘strength of
the signal’ and thus the strength of contraction of the muscle.
For applications where the machine can identify the function generated by the
muscle based on SEMG, require automated analysis and classification of SEMG. For
automated classification of SEMG related to movement, it is essential to develop the
system that can extract appropriate features of SEMG with respect to the movement
and have a mechanism for relating these features to the movement generating the
signal. Numbers of researchers have used different techniques for the purpose
including statistical analysis of the signal properties and auto-regression analysis
Graupe et al. [13] with 85% success rate. But this system was highly dependent on the
subject and recording and required high degree of manual intervention.
Hudgins et al [10] reported the first major work of SEMG classification using
Artificial Neural Networks (ANN). The ANN was used to introduce the flexibility
and self-learning ability to the classification technique. The accuracy of the
classification technique was ranging from 80% to 90%. The authors have also used
the magnitude of SEMG and neural network based classification to classify pre-
defined hand movements using three channels of SEMG [12].
Based on the above, this paper reports the use of multiple channels SEMG of the
facial muscles. RMS of the signal is computed and backpropagation neural network
has been used to classify SEMG with the shape of the mouth and lips so formed with
the aim to identify the vowel in the sub-auditory speech.
144

3 Methodology
3.1 EMG Recording and Processing
Three male subjects participated in the investigation. The AMLAB workstation was
used for EMG recording. The experiment used a 3-channel EMG configuration
according to recommended recording guidelines [7]. Ag/AgCl electrodes (AMBU
blue sensors from MEDICOTEST Denmark) were mounted on three selected facial
muscles (Mentalis, Depressor Anguli Oris and Massetter) on the right side of the
face. Inter electrode distance was arranged to be 1cm. Before the recording
commences, EMG target sites were cleaned with alcohol wet swabs. Inter-electrode
impendence was checked using a multimeter.
A pre-amplifier (with a Gain of 1000) was placed for each EMG channels. To
minimise movement artifacts and aliasing, a band-pass filter (with low corner (-3dB)
8Hz and with high corner (-3dB) frequency of 79Hz) was implemented. A notch
filter, to remove a 50Hz line noise, was also included. The EMG signal was amplified
and sampled with a rate of 250Hz.
Three facial EMG simultaneously were recorded and observed while subjects utter the
five English vowels (/a/, /e/, /i/, /o/, /u/) for three times with no acoustic out put (sub-
auditory). Enough resting time was given in between the three activations. Overall
fifteen data sessions were performed for each subject. To observe any changes in
muscle activity, the recorded raw EMG signal was further processed.
3.2 EMG Recording and Processing
After the recording process was completed, the raw EMG was transferred to Matlab
for further analysis.
The RMS (Root Mean Square) value of each signal was estimated by
applying equation (1):
RMS=
2/1
2
)(
1
⎥
⎦
⎤
⎢
⎣
⎡
∑
s
s
sf
s
Where ‘s’ is the window length and
f (s) is data within the window.
4 Recognition
Recognition of EMG based speech features may be achieved by applying a supervised
artificial neural network. The artificial neural network is efficient regardless of data
quality. Neural networks can learn from examples and once trained, are extremely fast
making them suitable for real time applications [8-9]. The classification by ANN does
not require any statistical assumptions of the data. ANNs learns to recognize the
characteristic features of the data to classify the data efficiently and accurately.
145
Back Propagation (BPN) type artificial neural network (ANN) was used for the
purpose. The advantage of choosing feed forward (FF) and BPN learning algorithm
architecture is to overcome the drawback of the standard ANN architecture.
Augmenting the input by hidden context units, which give feedback to the hidden
layer, thus giving the network an ability of extracting features of the data from the
training events is one advantage. The size of the hidden layer and other parameters of
the network were chosen iteratively after experimentation with the back-propagation
algorithm. There is an inherent trade off to be made. More hidden units results in
more time required for each iteration of training; fewer hidden units results in faster
update rate. For this study, two hidden layer structure was found sufficiently suitable
for good performance but not prohibitive in terms of training time. Sigmoid has been
used as the threshold function and gradient desent and adaptive learning with
momentum as training algorithm. A learning rate of 0.02 and the default momentum
rate was found to be suitable for training the network. The training stopped when the
network converged and with error less than the target error. The weights and biases of
the network were saved and used for testing the network. The data was divided into
subsets of training, validation, and test subsets data. One fourth of the data was used
for the validation set, one-fourth for the test set, and one half for the training set.
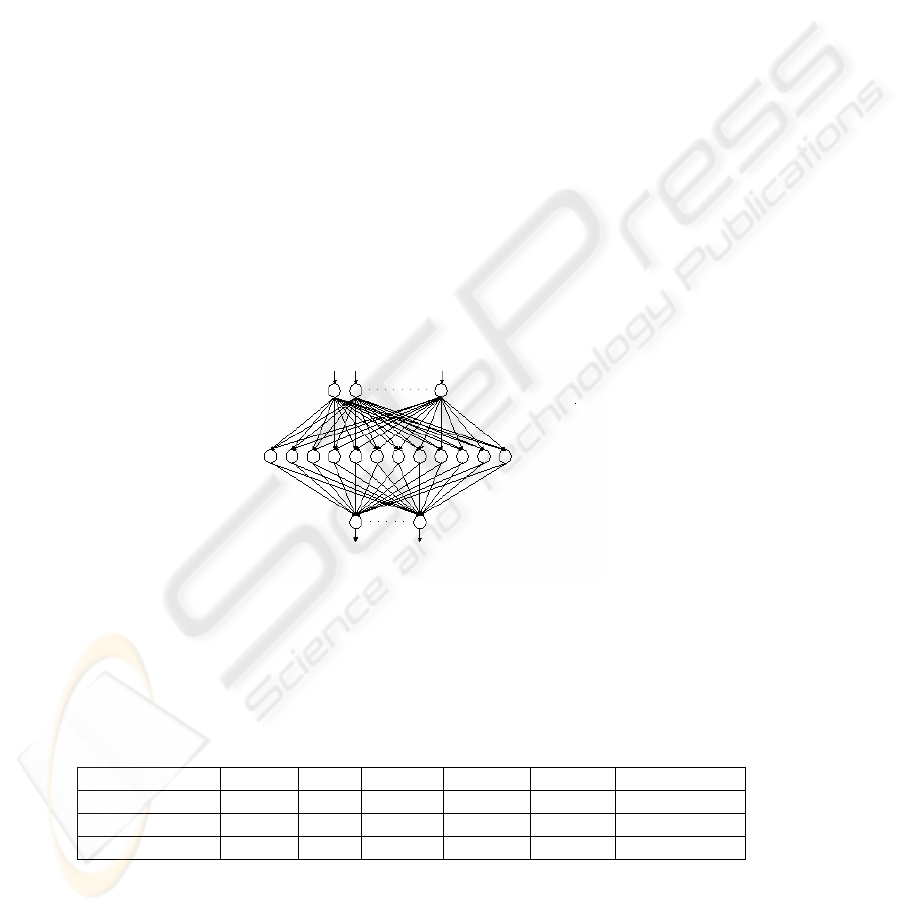
The RMS values of the three channels of EMG captured during the subject
pronunciation of the vowels were the inputs to the ANN. The target of the ANN was
the corresponding vowels. Fig. 1 depicts the ANN architecture. After training, the
system was tested and the accuracy of correct identification by the network was
tabulated (Table 1).
Fig. 1. Neural Network Architecture
5 Results and Discussion
Table 1. Recognition Accuracy (%)
/a/ /e/ /i/ /o/ /u/ Average
Subject 1 97 94 98 93 85 93.4
Subject 2 91 86 90 85 93 89
Subject 3 88 89 86 97 95 91
146

Table 1 shows the experimental results. The results of the testing show that with the
system described can classify the five vowels with an accuracy of up to 91%. The
higher classification accuracy is due to better discriminating ability of neural network
architecture and RMS of EMG as the features. At the present stage, the method has
been tested successfully with only three subjects. In order to evaluate the intra and
inter variability of the method, a study on a larger experimental population is
required. Fig.3-4 depicts the statistical bar diagrams of the three sub-auditory RMS of
EMG data. However, due to the small data bank, it is difficult to determine and
conclude the significance of the same.
6 Conclusion
This paper describes a study to recognise human sub-auditory speech signal based on
the EMG data extracted from the three articulatory facial muscles coupled with neural
networks. Test results show recognition accuracy of 91 %. The system is accurate
when compared to other attempts for EMG based sub-auditory speech recognition.
These preliminary results suggest that the study is suitable to develop a real-time
EMG based voiceless communication system.
7 Further Work
Authors are working with statistically larger population of experimental subjects.
References
1. M.S. Morse, Y.N. Gopalan, M. Wright: Speech recognition using myoelectric signals with
neural network, Annual International Conference of the IEEE Engineering in Medicine and
Biology Society, Vol.13, No.4, pp.1977-1878, 1991.
2. A.D.C. Chan, K.E., B. Hudgins, D.F. Lovely, Myo-electric signals to augment speech
recognition. Medical & Biological Engineering & Computing, 2001. 39: p. 500-504.
3. Hiroyuki Manabe, “Unvoiced Speech Recognition using EMG - Mime Speech Recognition
–“ Short Talks: Specialized Section CHI 2003: NEW HORIZONS Short Talk: Brains, Eyes
and Ears CHI 2003: NEW HORIZONS NTT DoCoMo
MultimediaLaboratories†manabe@mml.yrp.nttdocomo.co.jp
4. N. Sugie, K. Tsunoda,: A speech prosthesis employing a speech synthesizer. IEEE
Transaction on Biomedical Engineering, Vol.BME-32, No.7, pp.485- 490, 1985.
5. Chuck Jorgensen, Diana D Lee & Shane “Sub Auditory Speech Recognition Based on
EMG Signals” Agabon. , Proc. of the IEEE conference, 2003
6. Akira Hiraiwa NTT DoCoMo Multimedia Laboratories hiraiwa@mml.yrp.nttdocomo.co.jp
Toshiaki Sugimura NTT DoCoMo Multimedia Laboratories
sugi@mml.yrp.nttdocomo.co.jp
7. A J Fridlund, J.T.C., Guidelines for human electrographic research. Psycholphysiology,
1986. 23: p. 567-589.
8. A. Freeman and M. Skapura, Neural Networks: Algorithms, Applications, and
Programming Techniques, Addison-Wesley, Mass., 1991.
147
9. Haung, K.-Y., "Neural networks for robust recognition of seismic patterns,". IEEE
Transactions on Geoscience and Remote sensing 2001
10. Hudgins B, Parker PA, Scott RN, A new strategy for multifunction myoelectric control.
IEEE Trans Biomedical Engineering;40(1):82–94, 1993.
11. Paul A Lynn, Signal Processing of Speech Macmillan New Electronics S Publisher:
Palgrave Macmillan 1993, ISBN: 0333519213
12. Nigma M, Kumar D,Nemuel Pah,,Proc of the Seventh Australian and New Zealand
Intelligent Information System Conference Perth,West Australia,2001
13. Graupe D, Salahi J, Kohn K H Multifunction prosthesis and orthosis control via
microcomputer identification of temporal patter differences in single- site myoelectric
signals. J Biomed Eng 1982; 4:17–22.
0 1 2 3 4 5 6 7 8
-0.02
-0.01
0
0. 01
0. 02
EMG - Muscle: Depressor Angul i Oris - "unvoiced" letter "u"
Amplitude (mv)
0 1 2 3 4 5 6 7 8
-0.02
-0.01
0
0. 01
0. 02
EMG - Muscle: Massetter - "unvoiced" letter "u"
Amplitude (mv)
0 1 2 3 4 5 6 7 8
-0.02
-0.01
0
0. 01
0. 02
EMG - Muscle: Mentalis - " unvoiced" letter "u"
Amplitude (mv)
Time ( sec )
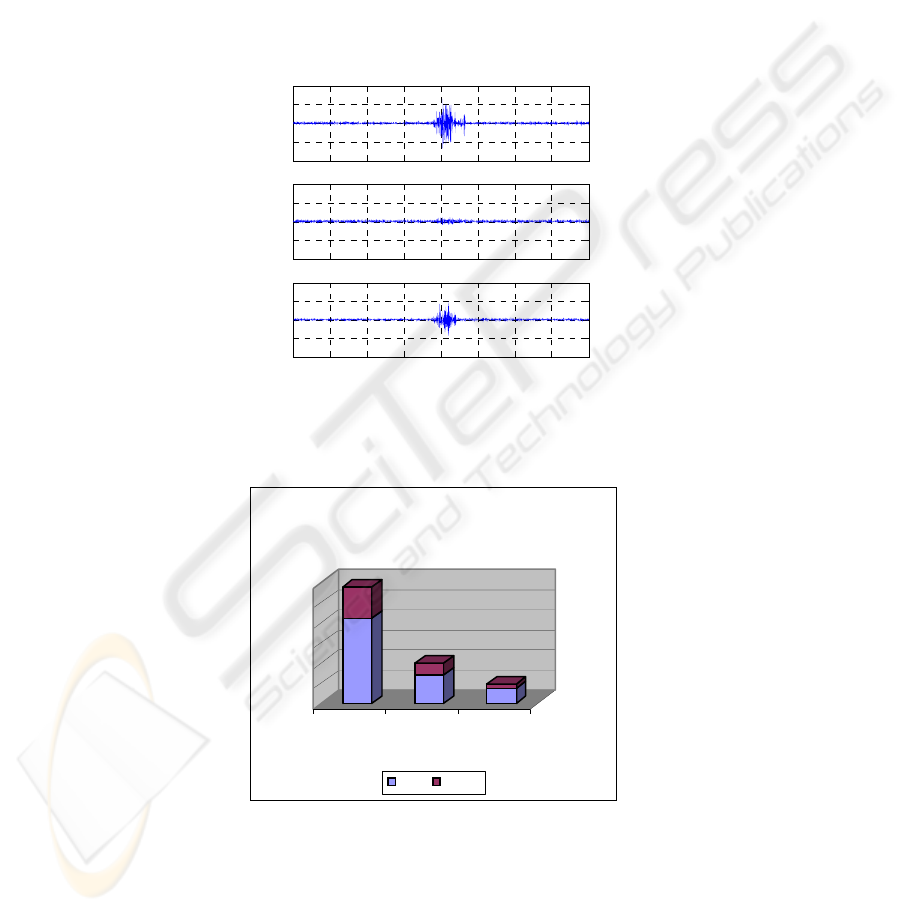
Fig. 2. EMG from three muscles of unvoiced data from subject for vowel “U”
Mentalis Depressor
Anguli Oris
Massetter
Bar Diagram of 3 Channel EMG
Unvoiced Data With "Vowel e"
Mean STDev
Fig. 3. Bar Diagram of 3 channels EMG data for Mean and Standard Deviation for “Vowel e”
Unvoiced data
148

0
0.002
0.004
0.006
0.008
0.01
M entalis M assett er
Bar Diagram of 3 Channel EMG
Unvoiced Data With "Vowel
/a/,/e/,/i/,/o/,/u/"
M ean STDev
Fig. 4. Bar Diagram of 3 channel EMG data for Mean and Standard Deviation for “Vowel
/a/,/e/,/i/,/o/,/u/” unvoiced data
149
