
SITUATION ASSESSMENT WITH OBJECT ORIENTED
PROBABILISTIC RELATIONAL MODELS
Catherine Howard*, Markus Stumptner**
*Electronic Warfare and Radar Division, Defence Science and Technology Organisation
PO Box 1500, Edinburgh, South Australia, 5111
**Advanced Computing and Research Centre, University of South Australia, Adelaide, South Australia, 5095
Keywords: Bayesian Networks, Decision Support Systems, Industrial Applications of Artificial Intelligence
Abstract: This paper presents a new Object Oriented Probabilistic Relational language whi
ch is built upon the Bangsø
Object Oriented Bayesian Network framework. We are currently studying the application of this language
for situation assessment in complex military and business domains.
1 INTRODUCTION
Decision making in time-critical, high stress,
information overloaded environments, such as the
tactical military domain, is a complex research
problem that can benefit from the application of
information fusion techniques. Information fusion is
the process of acquiring, aligning, correlating,
associating and combining relevant information
from various sources into one or more
representational formats appropriate for interpreting
the information. The Lambert revision (Lambert
2003) (λJDL) of the widely accepted Joint Directors
of Laboratories, or JDL, model (Steinberg, Bowman
et al. 1998) provides a functional model of the
information fusion process. λJDL divides the
information fusion into three sub-processes: object,
situation and impact fusion. This paper focuses on
Situation Fusion.
Within the λJDL
model, Situation Fusion is
defined as the process of utilizing one or more data
sources over time to assemble a representation of the
relationships of interest between objects of interest
in the area of interest in the battlespace.
Relationships of interest can include physical,
temporal, spatial, organizational, perceptual and
functional relationships. The relationships
meaningful to a user will be highly dependent on the
domain and the user’s intentions. A Situation
Assessment is defined as a persistent representation
of the relationships of interest.
While significant progress has been made in
Obj
ect Fusion, substantial challenges remain in
Situation and Impact Fusion (Llinas 2001; Sycara
and Lewis 2002; Lambert 2003; Salerno, Hinman et
al. 2003). One such challenge is the formalization of
the computational processes at these levels.
Formulating Situation Assessments from sensor
d
ata requires the ability to represent:
• Objects a
nd their attributes
• Relatio
nships and their attributes
and the ability to:
• Fu
se information at various levels of
abstraction
• Perform
temporal reasoning
• H
andle the uncertainty about:
o Th
e identity, number, location and attributes
of objects
o Th
e existence and attributes of relationships
1.1 Example Scenario
A classic situation assessment example is a tactical
military scenario where a helicopter is flying along a
planned route. The intent of the pilots is to arrive
safely at the target without being seen, acquired or
targeted by an adversary’s radar installations or shot
down by any weapon systems known to be co-
located with the radar installations. There are an
unknown number of land based friendly and
adversary radar and weapon installations in the area.
Onboard the helicopter is a suite of sensing systems
which collect and analyze emissions from the radars
during the flight, but provide only a partial picture of
the battle space. The data may be incomplete,
incorrect, contradictory or uncertain. It may have
various degrees of latency and may be affected by
the environment or by enemy deception or
412
Howard C. and Stumptner M. (2005).
SITUATION ASSESSMENT WITH OBJECT ORIENTED PROBABILISTIC RELATIONAL MODELS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 412-418
DOI: 10.5220/0002538904120418
Copyright
c
SciTePress

confusion, which creates false or misleading data.
The most important relationships of interest, given
the pilot’s intent, include the helicopter approaching,
receding from or traversing the detection range of a
radar or the lethality envelope of a weapon system.
In order to successfully complete the mission, the
pilot must develop an understanding of which, if
any, of these relationships exist at any given time
and the impact the existing relationships will have
on the mission objectives.
Counterparts to this competitive scenario in the
business domain are numerous, although spatial
relationships play little or no role; the threats are
competitor’s actions in the business environment
and the strategic choices correspond to business
decisions
.
1.2 The Road to OOPRMs
Bayesian Networks (BN) have been used in many
existing decision support systems, e.g., to reason
about causal and perceptual relationships between
objects in the battlespace in tactical military
reasoning (Laskey and Mahoney 1997; Mulgund,
Rinkus et al. 1997; Gonsalves and Rinkus 1998;
Jones, Hayes et al. 1998; Gonsalves, Rinkus et al.
1999; Das, Grey et al. 2002; Wright, Mahoney et al.
2002). However, BN have been shown to be
inadequate for reasoning about large, complex
domains (Pfeffer 1999) because of their lack of
flexibility, the fact that they are static models and
their inability to take full advantage of domain
structure or reuse. The lack of flexibility is of
particular importance to situation assessment domain
because the variables relevant to reasoning about a
situation will be dependent on the domain and the
user intentions.
We aim to use automated reasoning to derive
Situation Assessments from signal data to provide
dynamic decision support to decisionmakers such as
managers or tactical military commanders. In order
to do this, we need to represent and reason about the
location, status and the relationships which exist
between objects in the domain of interest (e.g., the
battlespace or market) given the input data (e.g.,
sensors or market reports). From the preceding
discussion of the limitations of BN in the domain, it
is clear that a technique is required which can allow
the random variables in the model, their state spaces
and their probabilistic relationships to vary over time
and from instance to instance. First Order
Probabilistic Languages (FOPLs) are languages
which combine probability theory with the
expressive power of first order logic. Recently,
FOPLs have been used in a number of domains such
as military situation awareness (Pfeffer 1999),
hypertext classification (Getoor 2002) and traffic
surveillance (Pasula 2003). Probabilistic Relational
Models (PRM) are a family of FOPL. The thesis
behind this work is that FOPL in the form of OPRM
will provide a flexible and practical approach to
reasoning in complex domains such as military
Situation Assessment. And that using such a
language will formalize the computational processes
at this stage of the information fusion process
.
2 PROBABILISTIC RELATIONAL
MODELS
Probabilistic Relational Models (PRM) (Koller and
Pfeffer 1998; Getoor 2002) extend traditional
attribute based Bayesian Networks with the concepts
of objects, their attributes and relationships between
them. The most important difference between BN
and PRM is that PRM define the dependency model
at the class level. The class dependency model is
then instantiated for any instance of the class.
PRM annotate frames with a probability model
representing the uncertainty over the properties of an
instance, capturing both its probabilistic dependence
on its own attributes and the attributes of related
instances. PRM specify a template for the
probability distribution over a knowledge base
(Getoor 2002). This template consists of two parts:
a relational component and a probabilistic
component. The relational component describes
how the classes in the domain are related. The
probabilistic component details the probabilistic
dependencies between attributes in the domain. A
PRM can also represent uncertainty over the
structure of the model.
PRM were created by integrating a frame-based
representation with the only OOBN framework
known at the time; Koller and Pfeffers OOBN
framework (hereafter referred to as KPOOBN).
However, recent work by Bangsø (Bangso and
Wuillemin 2000; Bangso 2004) has proposed a new
framework for OOBN (hereafter referred to as
BOOBN) which has several advantages over Koller
and Pfeffer’s OOBN framework.
Both KPOOBN and BOOBN frameworks define
an OOBN class as a BN fragment containing output,
input, and protected (or encapsulated) nodes. The
input and output variables form the interface of the
class. The interface encapsulates the internal
variables of the class, d-separating them from the
rest of the network. All communication with other
instances is formulated in terms of probability
statements over the instance’s interface.
The main difference between the two
frameworks is that BOOBN introduce the use of
SITUATION ASSESSMENT WITH OBJECT ORIENTED PROBABILISTIC RELATIONAL MODELS
413

reference nodes and reference links to overcome the
problem that no node inside a class can have parents
outside the class. A reference node is a special type
of node pointing to a node in another scope (called
the referenced node). A reference node is bound to
its referenced node by a reference link. BOOBN
define all input nodes to be reference nodes.
While these reference nodes create an additional
computational cost, they provide several important
benefits. For example, the reference nodes enable
BOOBN framework to have a more intuitive
definition of inheritance in the modeling domain.
KPOOBN inheritance definition corresponds to
contravariance while Bangsø’s definition
corresponds to covariance. The reference nodes also
allow the BOOBN framework to compactly
represent dynamic situations, whereas KPOOBN, as
it stands, does not have the expressive power to deal
with situations that evolve over time (Koller and
Pfeffer 1997). These reference nodes also provide
an advantage during inference, as outlined in Section
6.
3 OBJECT ORIENTED PRM
Following the example set by Koller and Pfeffer’s
PRM, we have integrated a frame based
representation system with the BOOBN framework.
Throughout the remainder of the paper, the
University example shown in Figure 1 will be used
to illustrate the discussion. We decided to use this
relatively “unthreatening” business domain to
simplify the exposition and avoid the complexities
of identity uncertainty (discussed in Section 7). The
following definitions expand (Getoor 2002).
Definition 3.1: OPRM (like PRM) consist of a
relational component and a probabilistic component.
The relational component consists of:
• A set of classes, C ={C
1
, C
2
,…, C
n
}, and possibly
a partial ordering over C which defines the class
hierarchy. The set of classes in the University
example is C = {Lecturer, Paper, Conference,
Promotion Evaluation}.
• A set of descriptive attributes for each class C in
C. C
1
.A is an attribute A of class C
1
. Each s
descriptive attribute A has a domain type
Dom[A]∈C and a range type Range[A]=Val[A]
where Val[A] is a predefined finite enumerated set
of values. The set of descriptive attributes of class
C is denoted A(X). In the University example,
A(Lecturer)={Tired, Productivity, Teaching
Skills, Brilliance, Quantifier(Papers) and
WillGetPromoted}. The Productivity attribute of
the Lecturer class has Val[Productivity] = {low,
medium, high}.
• A set of reference attributes ρ for each class C in
C. C
1
.ρ is a reference attribute ρ of class C
1
.
Reference attributes represent functional
relationships between instances in the knowledge
base (i.e. they are attributes which reference other
frame instances). Each reference attribute ρ has a
domain type Dom[ρ]∈C and a range type
Range[ρ]∈C for some class C in C. Each
reference attribute (except uncertain reference
attributes) have an inverse, which is interpreted as
the inverse function of ρ. In our University
example, the Paper class has a single valued
reference attribute Conference whose value is an
instance corresponding to an instance of the
Conference class. The set of reference attributes
of class C is denoted R(X). In the University
example, R(Paper)={Conference, Promotion
Evaluations}.
• A set of named instances, I, which represent
instantiations of the classes. As multiple
inheritance is not accommodated in this
framework, each instance is an instance of only
one class.
The probabilistic component consists of:
• A set of conditional probability models P(A|Pa[A])
for the descriptive attributes, where Pa[A] is the
set of parents of A. These probability models may
be attached to particular instances or inherited
from classes because like PRM, OPRM define the
dependency model at the class level, allowing it to
be instantiated for any instance of that class.
The classes of the OPRM are organized into a
hierarchy. A frame’s slots and facets, including
their probability models, are inherited from the
frame’s superclass in the hierarchy. If required,
subclasses can redefine any inherited information of
any attribute including the probability model.
3.1 Inference in OPRM
Inference is performed on an instantiated OPRM by
constructing the ‘equivalent’ BOOBN for each class
by instantiating a node for each uncertain descriptive
attribute in the class. The protected nodes in these
equivalent BOOBN are encapsulated from the rest of
the model via the instances interface and the
inference algorithms take advantage of this fact.
3.2 Multi-Valued Reference
Attributes
Reference attributes do not necessarily represent
one-to-one relationships. These attributes can be
multi-valued, representing one-to-many and many-
to-many relationships. For example, the Paper
attribute in the Promotion Evaluations class is a
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
414
multi-valued reference attribute. Each value the
attribute can take on is an instance of the Paper
class. But the parents of a descriptive attribute such
as Lecturer.WillGetPromoted must be descriptive
attributes. In order to allow descriptive attributes
such as Lecturer.WillGetPromoted to depend on
attributes of related instances where the relations is
multi-valued, an aggregate attribute is introduced
into the frame containing the multi-valued attribute.
Aggregate attributes allow descriptive attributes
such as Lecturer.WillGetPromoted to depend on
the set of instances via an aggregate property of the
set, rather than each individually related instance.
Definition: An aggregate attribute γ(ρ) is a
descriptive attribute which summarizes a property of
a set of related instances. Attributes other than
aggregate attribute cannot depend directly in a multi-
valued reference attributes.
An aggregate attribute is represented in the
equivalent BOOBN by a simple node. As a
descriptive attribute, an aggregate attribute has a set
of parents, which includes each related instance, and
a distribution that specifies the conditional
probability over its values, given the values of its
parents
In our university example, the aggregate attribute
QuantifierPapers is true if and only if more than 5
papers have a high impact, i.e. true if ≥
5(Papers.Impact:high). In this case the value of
the aggregate attribute is {true, false}. Because an
aggregate attribute is a descriptive attribute, it can be
a parent of another attribute. For example,
Lecturer.Quantifier(Papers) is a parent of
Lecturer.WillGetPromoted
.
4 THE UNIVERSITY EXAMPLE
The University example model is the simplest form
of OPRM, where the complete relational structure
(i.e. the set of objects and relationships between
them) is known. Given the relational structure, the
OPRM specifies a probability distribution over the
attributes of the instances in the model. We are
employing the unique names assumption in this
example, which means that each object in the
knowledge base is assumed to have a unique
identifier (i.e. identity uncertainty is not present).
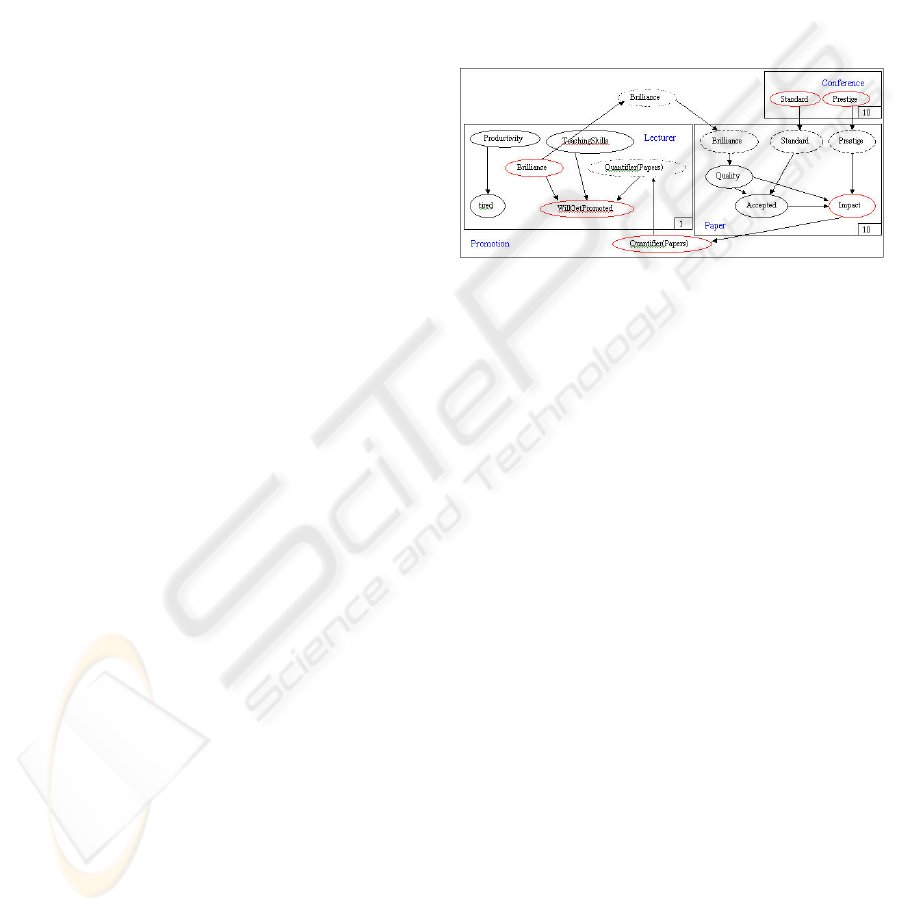
The OPRM shown in Figure 1 evaluates the
promotion prospects of university academics based
upon their teaching skills, brilliance and productivity
and the impact of their publications. The impact of
their publications are effected by the standard and
prestige of the conferences to which they were
submitted and is summarized by the aggregate node
Quantifier(Papers).
In the diagram, the red nodes indicate output
nodes while the dashed nodes represent input nodes.
Together input and output nodes define the
interfaces, Int, of the various classes. For example,
the interface for the
Lecturer class Int(Lecturer) =
{Quantifier(Papers), Brilliance, Will-GetPromoted}.
The interface for the Paper class is Int(Paper) =
{Brilliance, Standard, Prestige,Impact}. The interface
for the Conference class is Int(Conference) =
{Standard, Prestige} while the interface for the
Promotion Evaluations class is Int(Promotion
Evaluations) = {Quantifier(Papers), Brilliance}.
Figure 1: The university OPRM. The model contains one
instance of the Lecturer class, ten instances of the Papers
class and ten instances of the Conferences class
5 TECHNIQUES FOR
REPRESENTING
UNCERTAINTY
The OPRM framework (like PRM) can be extended
to accommodate uncertainty about the relational
structure of the model. In these cases, the
uncertainty in the relational structure needs to be
explicitly modeled in the OPRM. The following
techniques (adapted from (Koller and Pfeffer 1998;
Pfeffer, Koller et al. 1999; Getoor 2002)) are useful
when the knowledge about the relational structure is
not complete
.
5.1 Structural Uncertainty
There are three types of structural uncertainty;
number, reference and identity uncertainty. The
techniques used to extend OPRM to accommodate
the first two types will be discussed in this section.
As we do not yet have techniques to accommodate
identity uncertainty into OPRM, it is discussed
further in Section 7
.
SITUATION ASSESSMENT WITH OBJECT ORIENTED PROBABILISTIC RELATIONAL MODELS
415

5.2 Number Uncertainty
Number uncertainty is present when it is unclear
how many values a multi-valued reference attribute
can take. For example, it may be uncertain how
many papers the lecturer Dr Smith has written.
Number uncertainty allows the set of instances in the
model to be varied.
Number uncertainty is integrated into the
probabilistic model of a class by introducing a
number attribute.
Definition: A number attribute num(ρ) is a
descriptive attribute with the range equal to the set
of integers {0…n} where n is the upper bound.
Num(ρ) denotes the number of values of ρ.
A number attribute is represented in the
equivalent BOOBN by a simple node. As a
descriptive attribute, a number attribute has a set of
parents (e.g., num(Paper) could be dependant on
Lecturer.Productivity) and a distribution that
specifies the conditional probability over its values,
given the values of its parents.
Recall from Section 3.2 that multi-values
reference attributes require an aggregate node to be
introduced into the network. Under number
uncertainty, the value of the aggregate attribute will
depend on the number attribute as well as the value
of related instances. For example, the value of
DrSmith.Quantifier(Papers) will depend on the
number attribute DrSmith.num(Papers) and the
impact attribute of the set of related instances
Paper[1] through to Paper[10]
.
5.3 Reference Uncertainty
Reference uncertainty is uncertainty over the value
of a single-valued reference attribute. For example:
it may be uncertain which conference Paper[1] was
submitted to. That is, there is uncertainty over
which Conference frame instance the
Paper[1].Conference reference attribute refers to.
In this case, which value of conference Prestige and
Standard should be used to determine the impact of
the paper? Reference uncertainty allows the
relationships between instances to be varied.
If C1.ρ (Paper.Conference) is an uncertain
reference attribute with domain C2 (Conference).
In the case of reference uncertainty, we need to
specify a probability model for the value of the
uncertain reference attribute C1.ρ. Instead of having
the OPRM specify a probability distribution directly
over the set of instances of C2 (i.e. Conference1-
Conference10), a technique introduced by (Getoor
2002) partitions the instances of C2 into subsets
using attributes of C2. The probability distribution
can then be specified over these partitions (which
encodes how likely the reference attributes value is
to fall into one partition versus another). Instances
are then selected uniformly from within these
partitions.
Thus reference uncertainty is integrated into the
probabilistic model of a class by associating each
uncertain reference attribute ρ of the class with a
selector attribute sel(ρ).
Definition: A selector attribute sel(ρ) is a
descriptive attribute where the values are a finite
enumerated set of frame instances. The partition
function (Getoor 2002) is defined as
Ψ
ρ
:Y→Dom[Ψ
ρ
]. The values of the partition
function, ϕ, determine the subset of C2 from which
the value of ρ will be selected. The domain of the
selector attribute is Dom[Ψ
ρ
]. Thus the choice of
value for sel(ρ) determines the subset of C2 from
which the value of ρ is chosen. A partition function
has a set of partition attributes P[ρ] for of ρ. The
parents of sel(ρ) are those attributes/attribute chains
which influence the choice of a frame instance as the
value of ρ.
A selector attribute is represented in the
equivalent BOOBN by a simple node. In addition to
the selector attribute node, a multiplexor node is
introduced to the network. The set of parents for the
multiplexor node include the selector attribute and
all instances of the related frame (eg. the
Conference.standard node for each instance of
Conference). The multiplexor node uses the
probability distribution of the selector attribute to
select as its value the value of one of its other
parents.
To continue our University example, uncertainty
over which conference Paper[1] had been submitted
to would result in Paper[1].Accepted being
dependant on all possible combinations of
Conference.Standard values for the uncertain
Conference attribute. The value of
Paper[1].Conference could be one of several
Conference instances depending on the value of the
selector attribute. The set of Conferences could be
partitioned based on the Prestige attribute. In this
case P[Paper.Conference]={Prestige} and
ϕ
Paper.Conference
:
Conference→{low,medium,high}.
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
416
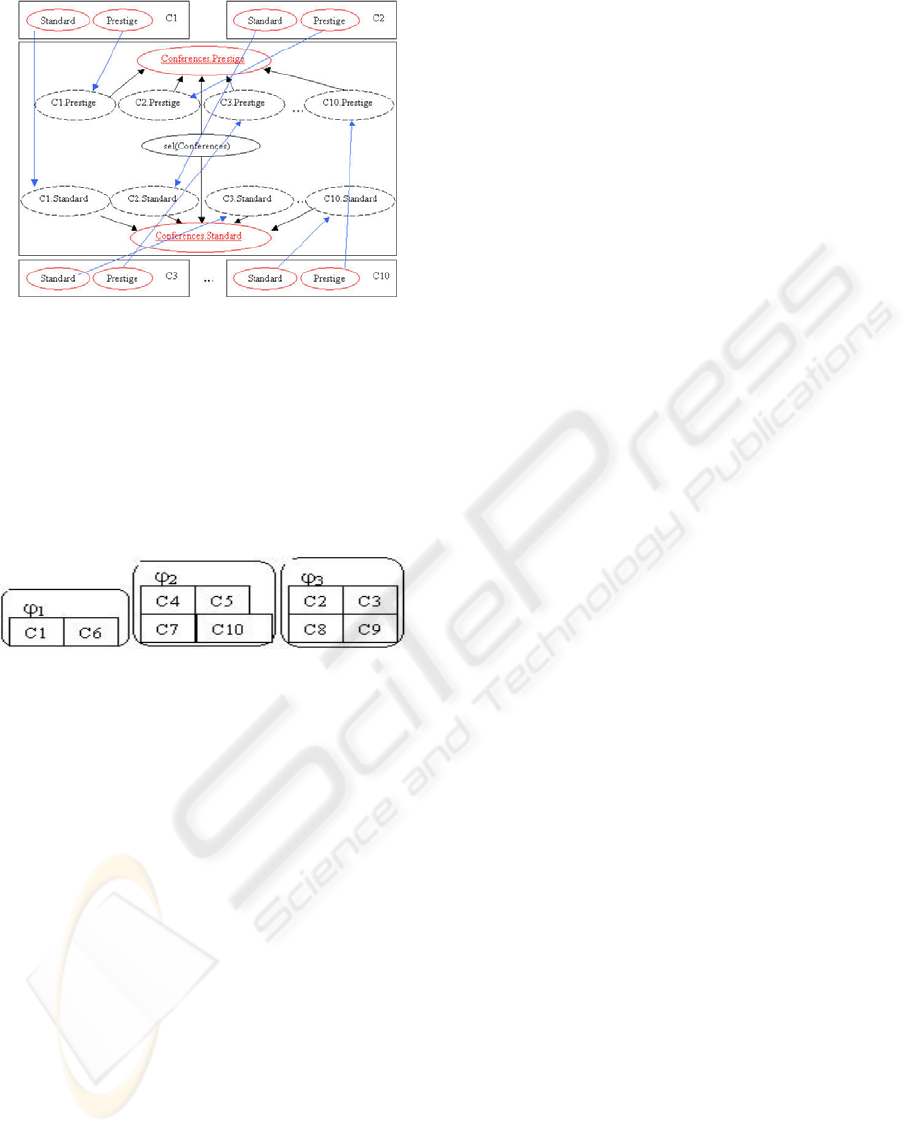
Figure 2: The equivalent BOOBN which would be used to
determine the values of Conference.Prestige and
Conference.Standard under reference uncertainty
The CPD for the selector attribute could be [0.1
0.6 0.3], i.e., it is 30% likely that the paper was
accepted by a prestigious conference, 60% likely the
paper was accepted by a conference with a medium
level prestige and 10% likely the paper was accepted
to a conference with a low prestige
.
Figure 3: An example of how the Conference instances
could be partitioned based on the Prestige of the
Conference where ϕ
1
is the set of conferences with low
prestige, ϕ
2
medium and ϕ
3
high
5.4 Existence Uncertainty
OPRM allow both real world objects and the
relationships between them can be represented by
classes. Existence uncertainty occurs when it is
uncertain whether a relationship exists between
objects. A set of potential relationship classes is
specified, but it is uncertain which relationships
actually exist. Existence uncertainty is required in
the competitive domains because there is often only
partial, indicative (not definitive) evidence of the
presence of a relationship between objects in the
market or battlespace. Existence uncertainty is
integrated into the probabilistic model of a class by
introducing an existence attribute.
Definition: An existence attribute is a
descriptive attribute whose value of {true, false}
depends on the existence attribute of all parents of
the existence attribute.
An existence attribute is represented in the
equivalent BOOBN by a simple node with links to
its parents. A class exhibiting existence uncertainty
is called undetermined and each instance of the class
contains an existence attribute. For classes that are
determined, the value of the existence attribute is
always true
.
6 FUTURE WORK
Like PRM, and indeed most current FOPL
approaches (Pasula 2003), OPRM employ the
unique names assumption. That is, each instance in
the knowledge base is assumed to correspond to a
different object. This assumption may be violated in
the military domain, where there is a distinct
possibility that multiple observations (and therefore
multiple instances in the knowledge base) may
represent the same object. In the military
information fusion domain, identity uncertainty
would have a profound impact on data association
(the tracking of objects from time to time and from
sensor to sensor). A recent thesis by (Pasula 2003)
investigated the incorporation of identity uncertainty
into PRM. Future work will include the
investigation of techniques for incorporating identity
uncertainty into OPRM.
The expressive power of OPRM makes it easy to
construct models whose equivalent OOBN will have
very large cliques. Incorporation of identity
uncertainty into the language would only exacerbate
this problem. We also intend to research and
implement appropriate approximate inference
algorithms
.
7 CONCLUSIONS
We have presented OPRM, a language that extends
the Object Oriented Bayesian Network framework
developed by Bangsø with a frame-based
representation. This language allows domains to be
modelled in a structured manner in terms of objects
and the relationships between them. We postulate
that once identity uncertainty is incorporated into the
language, OPRM will provide a flexible and
practical approach to reasoning in complex domains,
such as military or economic situation assessment,
where the unique names assumption cannot be
employed. We also postulate that the extended
version of OPRM will provide a formalism for the
Situation Assessment computational processes.
As relational databases are a common
mechanism for representing structured data (e.g.
medical records, sales and marketing information,
etc), OPRM are applicable to a wide range of
SITUATION ASSESSMENT WITH OBJECT ORIENTED PROBABILISTIC RELATIONAL MODELS
417

domains and applications for example, disaster
management and computer network security and
stock market modelling.
REFERENCES
Bangso, O. (2004). Object Oriented Bayesian Networks.
PhD Dept. of Computer Science, Aalborg University:
110.
Bangso, O., M. J. Flores, et al. (2004). Plug and Play
Object Oriented Bayesian Networks.
Bangso, O. and P.-H. Wuillemin (2000). Top Down
Construction and Repetitive Structures Representation
in Bayesian Networks. Proc. 13
th
FLAIRS, AAAI
Press.
Das, S., R. Grey, et al. (2002). Situation Assessment via
Bayesian Belief Networks. Proc. 5
th
Int'l Conf on
Information Fusion, Annapolis, MD, USA.
Flores, M. J., J. A. Gamez, et al. (2003). Incremental
Compilation of a Bayesian Network. Proc. 19
th
Conf
on Uncertainty in Artificial Intelligence, Morgan
Kaufmann.
Getoor, L. (2002). Learning Statistical Models From
Relational Data. PhD thesis Department of Computer
Science, Stanford University: 189.
Gonsalves, P., G. Rinkus, et al. (1999). A Hybrid Artificial
Intelligence Architecture for Battlefield Information
Fusion. Proc. 2
nd
Int'l Conf on Information Fusion,
Sunnyvale, CA.
Gonsalves, P. G. and G. J. Rinkus (1998). Intelligent
Fusion and Asset Management Processor. 1998 IEEE
Information Technology Conference, Syracuse, NY.
Jones, P. M., C. C. Hayes, et al. (1998). CoRAVEN:
Modeling and Design of a Multimedia Intelligent
Infrastructure for Collaborative Intelligence Analysis.
Proc. of the IEEE Int'l Conf on Systems, Man, and
Cybernetics (SMC'98), San Diego, California.
Koller, D. and A. Pfeffer (1997). Object-Oriented
Bayesian Networks. Proc. 13
th
Conference on
Uncertainty in Artificial Intelligence, Providence, RI.
Koller, D. and A. Pfeffer (1998). Probabilistic Frame-
Based Systems. Proc. 15
th
National Conference on
Artificial Intelligence (AAAI-98), Madison,
Wisconsin.
Lambert, D. A. (2003). Grand Challenges of Information
Fusion. Proc. 6th Int'l Conf on Information Fusion,
Cairns.
Laskey, K. B. and S. M. Mahoney (1997). Network
Fragments: Representing Knowledge for Constructing
Probabilistic Models. Proc. 13
th
Conf on Uncertainty
in Artifical Intelligence, Providence, RI, Morgan
Kaufmann.
Llinas, J. (2001). Handbook of Multisensor Data Fusion.
Boca Raton, FL, CRC Press.
Mulgund, S., G. Rinkus, et al. (1997). OLIPSA: On-Line
Intelligent Processor for Situation Assessment. Proc.
2
nd
Annual Symp on Situational Awareness in the
Tactical Air Environment, Patuxent River, MD.
Pasula, H. M. (2003). Identity Uncertainty PhD thesis in
Dept of Comp Sci, University of California, Berkeley.
Pfeffer, A., D. Koller, et al. (1999). SPOOK: A System for
Probabilistic Object Oriented Knowledge
Representation. Proc. 15th Conf Uncertainty in AI
(UAI-99).
Pfeffer, A. J. (1999). Probabilistic Reasoning for Complex
Systems.PhD thesis Dept of Comp Sci, Stanford Uni.
Salerno, J., M. Hinman, et al. (2003). Information Fusion
for Situational Awareness. Proc. 6th Int'l Conf on
Information Fusion, Cairns, Queensland.
Steinberg, A. N., C. L. Bowman, et al. (1998). Revisions
to the JDL Data Fusion Model. The Joint NATO/IRIS
Conference, Quebec, Canada.
Sycara, K. and M. Lewis (2002). From Data to Actionable
Knowledge and Decision. Proc. 5th Int'l Conf on
Information Fusion, Annapolis, MD, USA.
Wright, E., S. M. Mahoney, et al. (2002). Multi-Entity
Bayesian Networks for Situation Assessment. Proc.5
th
Int'l Conf on Information Fusion.
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
418
