
ROBOT BEHAVIOR ADAPTATION FOR FORMATION
MAINTENANCE
Maite L
´
opez-S
´
anchez
WAI Volume Visualization and Artificial Intelligence Research Group, MAiA Dep
Universitat de Barcelona. Gran Via de les Corts Catalanes 585, Barcelona, Spain
Keywords:
Autonomous robotics, behavior-based robots, simulation.
Abstract:
The autonomous robot formation maintenance problem can be approached by considering local information
only. This approach is more realistic than using global information, but presents a troop deformation draw-
back. This paper performs a step forward in local information usage for formation maintenance by analyzing a
parameterization of different basic behaviors. Formation maintenance emerges from the combination of these
simple behaviors, and its overall accuracy is empirically optimized by tuning behavior parameters. In particu-
lar, we study and characterize three different formations: queue or column (as for ants), inverted V or wedge
(as for birds or planes) and rectangle (for manipulus an tique roman troop formations). This paper describes
simulated robots that incorporate a unique set of basic behaviors from which formation maintenance emerges.
These simple behaviors provide formation robustness and are parameterized in order to minimize deformation
while following a trajectory.
1 INTRODUCTION
In this paper simulated robots implement a series of
basic behaviors that use local information to allow
the emergence of a global behavior that maintains the
group formation without having the notion of it em-
bedded in the individuals. In particular, we consider
an autonomous maintenance of three different well-
known formations in motion (see figure 1): queue,
also known as line or column, is the simplest; wedge –
or inverted V-formation– has aerodynamic advantages
so it is usually adopted by birds and planes; and rec-
tangle, which is much more condensed, corresponds
to the ‘manipulus’ antique roman troop formation in
military operations.
Most early work in formation control of robots
(Bekey, 2005) has assumed global knowledge. Balch
and Arkin identified tree approaches to formation
control (Balch and Arkin, 1998): unit centre ref-
erenced, leader referenced and neighbor reference.
They differ in the information that each robot requires
to compute its desired position. Every robot in a unit
centre referenced formation uses as reference the cen-
troid position of the whole robot group, so robots re-
quire global information. Similarly, for leader refer-
enced formations, robots always know the position of
the leader regardless its position, thus this formation
also entails a global scope. On the contrary, neighbor
reference is the only that is considered to use local in-
formation since a robot can take as reference a robot
in its vicinity and gather information about it (such as
its position or distance to it) by using its own sensors.
Although simulations usually have access to global
information, it is much more realistic to use local in-
formation when modeling physical formations such
as robotic or biological groups, where the access to
the overall information is hardly possible mainly due
to sensing capabilities and to limitations on commu-
nication.
Therefore, our formation simulations consider lo-
cal information only, assuming a neighbor reference
approach. Furthermore, our pure local information
approach lacks of a “formation notion”. In this man-
ner, a robot only knows about its neighbors and does
not have the concept of group nor the group ability
to keep the formation (since its measurement would
require some sort of global information).
Unfortunately, local information presents the prob-
lem of error propagation among robots in the forma-
tion, whose main consequence is the deformation of
the troop. This is an important issue that we tackle
by parameterising the basic behaviors and perform-
ing experiments to study how these parameter val-
ues influence in the whole performance. In order
to facilitate the set up and comparison of different
settings, experiments have been conducted by sim-
283
López-Sánchez M. (2006).
ROBOT BEHAVIOR ADAPTATION FOR FORMATION MAINTENANCE.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 283-288
DOI: 10.5220/0001211502830288
Copyright
c
SciTePress

Figure 1: Robot’s references (black arrows) in our three dif-
ferent formations.
ulation, based on the open source OpenSteer (Steer,
2004) C++ library.
2 BASIC BEHAVIORS
We consider formations as specific distributions of ro-
bots with regular relative positions. Additionally, if
formations are to be maintained while moving, they
require a robust adaptation in order to keep these local
relations as constant as possible. Simplicity is often
related to robustness, and therefore, we propose that
all robots in the troop do rely on a reduced set of basic
behaviors to maintain formations.
Briefly, these simple behaviors are: “Reaching
a target position”; “Reference neighbor following”;
“Reactivity”; “Waiting for the follower”; and “Pri-
ority respect”. The former is the one that actually
moves the robot towards a target position that is com-
puted by the “Reference neighbor following” behav-
ior based on the reference robot’s position. Neverthe-
less, one robot lacks of reference so that it is given a
trajectory to follow and it is said to be the leader or
conductor. Additionally, “Reactivity” behavior deter-
mines the degree of sensitivity of a robot regarding
its reference. Finally, “Waiting for the follower” and
“Priority respect” behaviors implement what could be
interpreted as social courtesy.
This section describes these simple behaviors in-
dividually, giving a hint of their different complex-
ity degrees and how can they be parameterized. Next
section will afterwards show how three different for-
mations are composed by defining different relative
positions.
We propose the following basic behaviors:
Reference neighbor following: Robots follow the
trajectories of their reference neighbors keeping fixed
angles α and distances d (see Figure 2). Different for-
mations require different angles and reference robots
(see figure 1), so they can be treated as fixed forma-
tion properties. On the contrary, the separation dis-
tance depends on other factors such as robot visibility
range, speed or reaction capabilities, so it has been
used as a parameter to tune the overall performance.
Reactivity: Reference neighbor following im-
plies the propagation and amplification of movements
along the formation. Noisy movements must there-
fore be filtered. This is done by this “Reactivity” ba-
Figure 2: Reference neighbour following behaviour: a
white robot follows the orange one.
Figure 3: Tolerance for reaching a target position.
sic behavior, which establishes a minimum movement
distance the reference robot must move before the fol-
lower reacts and follows it. Small values for this pa-
rameter do not avoid noise and emergence of many
oscillations. On the contrary, large values introduce
delays in the formation.
Reaching a target position: When a robot tries
to reach a position, it must get to the target position
and stop there, and therefore, it must reduce its veloc-
ity when approaching the target position at a certain
braking distance (i.e. a parameter). If this distance is
too large, robot separation distances are never accom-
plished, since the follower robot moves significantly
slower than the reference robot. On the other hand, if
this braking distance is too small, the inertia of a ro-
bot moving at high speed causes the robot to surpass
the target position and to include loops in the trajec-
tory that are afterwards propagated to following ro-
bots. Similarly, reaching an exact position may be too
demanding for robots without much accuracy. This
requires a tolerance parameter (see figure 3) so to en-
large the target position point up to a circle without
loosing much accuracy in maintaining the formation.
Waiting for the follower: This behavior forces the
reference robot to reduce its velocity when its fol-
lower robot exceeds a threshold distance (that is, be-
fore it can be lost). Figure 4 shows this maximum
separation distance as the radius of blue circumfer-
ences centered on each reference robot. Obviously,
this threshold distance should be larger than the sepa-
ration distance parameter.
Priority respect: Leader’s trajectories can have
loops that force following robots to cross their ways.
Robots should thus avoid to collision with crossing
ones. As figure 5 shows, this behavior has two pa-
rameters: a critical stopping distance that makes the
ICINCO 2006 - ROBOTICS AND AUTOMATION
284
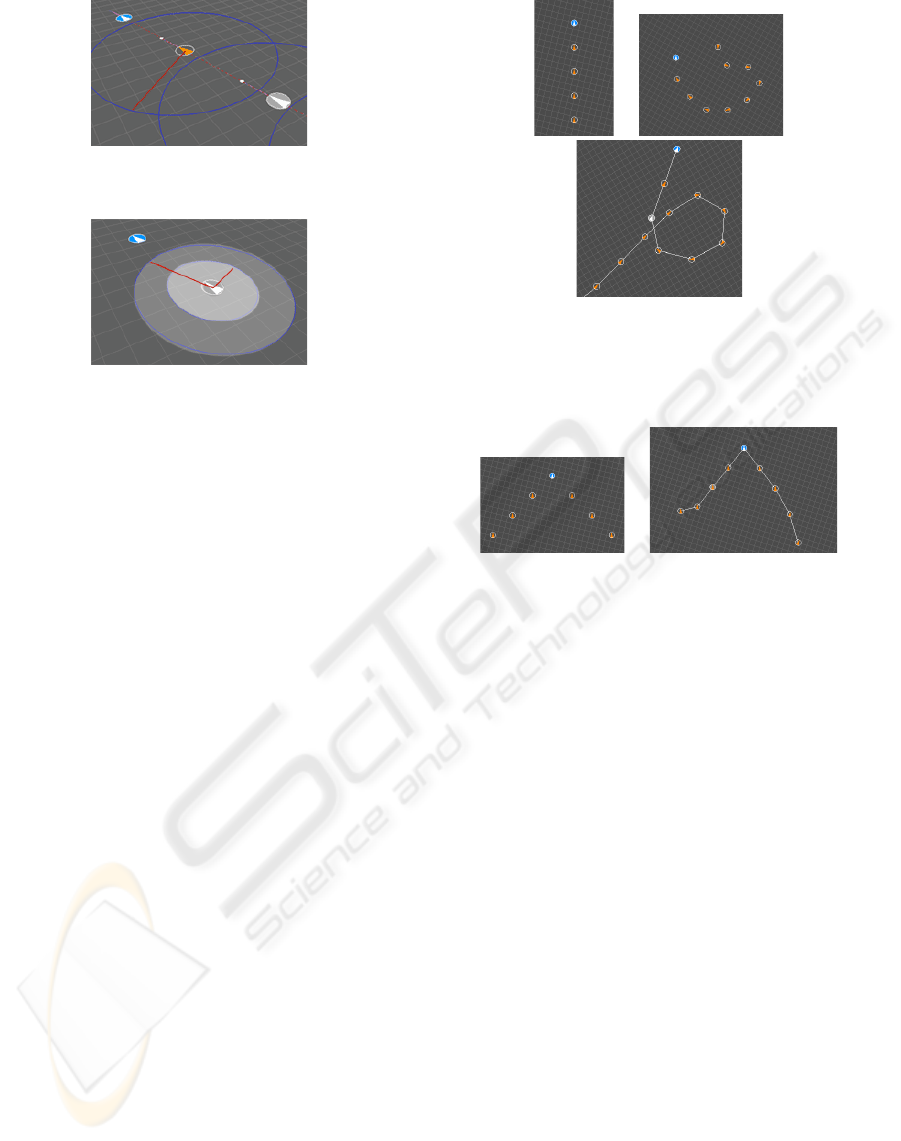
Figure 4: Waiting for the follower behavior.
Figure 5: Priority respect behavior.
robot to stop in order to avoid an imminent collision
and a larger precautionary distance that only requires
a speed reduction (the critical braking distance). Both
distances have an angle of influence and there is a
priority system that establishes a total order relation
among robots, so that when a robot encounters in its
neighborhood area another robot, it detects its order-
ing and, and decides to give it the priority in order to
avoid waiting deadlocks.
3 FORMATION MAINTENANCE
AS EMERGENT BEHAVIOR
From the combination of previous basic behaviors we
can obtain complex behaviors that allow the robots to
maintain different formations. Each type of formation
just emerges by specifying reference robots and the
angle to form with them. Here we study three of them.
Queue: when having a queue of robots, the refer-
ence robot is the foregoer and the angle is zero de-
grees. The only exception is the leader, positioned on
the first place, which follows its own trajectory. As
a consequence of the “Reference neighbor following”
behavior, the formation propagates the movement of
the leader. In this manner, all robots in the queue pass
eventually through the same positions. Figure 6 a)
shows a snapshot of the formation in movement when
the leader follows trajectories that are rectilinear (a),
curved (b) or crossed (c).
Inverted V: birds and planes usually adopt in-
verted V-formations due to its aerodynamic advan-
tages. Leaders are located at the centre of the for-
mation and angles must be +/-45 degrees for those
robots on the left/right side. As before, the reference
a) b)
c)
Figure 6: Queue formation in movement: a) The troop
leader follows a rectilinear trajectory, b) a curved path, and
c) a trajectory with a loop (white lines clarify successor re-
lations).
a) b)
Figure 7: Inverted-V formation in movement. a) The troop
leader follows a rectilinear trajectory, b) leader turns left.
robot is the foregoer. Rectilinear trajectories do not
deform formations (see Figure 7 a)). On the contrary,
deformations appear for turnings. Figure 7 b) shows
the consequences of a left turn (right turns perform
analogously): right-side robots must follow a wider
trajectory so that distances between robots increase
before robots can adapt whilst left-side robots must
move slower because foregoers become closer to fol-
lowers.
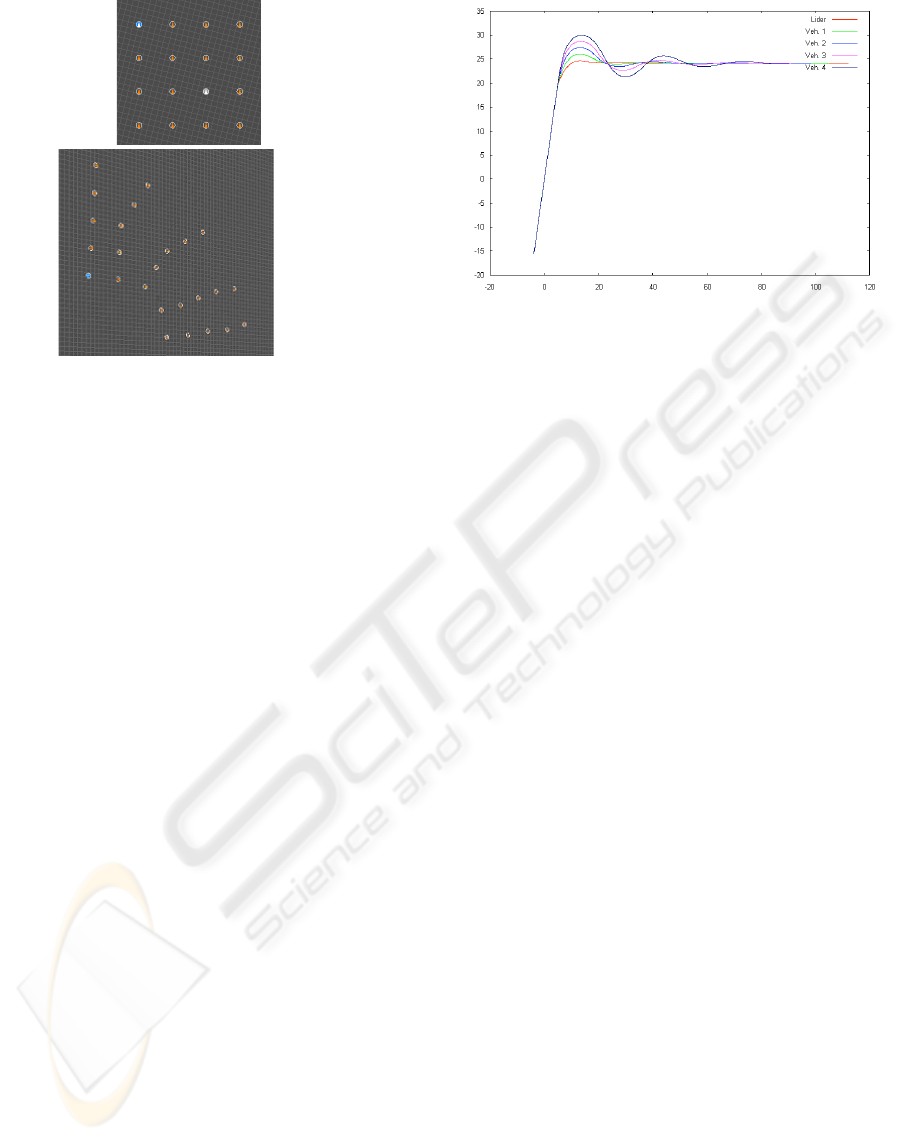
Rectangle: This formation comes from the ‘manip-
ulus’ antique roman troop formation in military oper-
ations and is characterized by its density of individu-
als. Figure 8 a) illustrates a formation with its leader
located on the top left position. This facilitates left
turns such as the one depicted in figure 8 b). Rectan-
gle formations require robots to have two reference
robots: the one in front and the robot on the left hand
side. Therefore, angles are 0 degrees and -90 degrees
respectively. As we can see, the deformation during
turns becomes obvious, since robots on the right side
of the formation must cover much longer distances,
whereas robots behind the leader behave quite simi-
larly to robots in a queue. Finally, just mention that,
for right turns, the robot on the top right position
should become the leader, just as soldier troops do
in real settings.
Although queue formations adapt to trajectory
ROBOT BEHAVIOR ADAPTATION FOR FORMATION MAINTENANCE
285
a)
b)
Figure 8: Rectangle formations a) 16 robots at its initial
positions b) 25 robots when the leader has turned left.
changes faster than inverted-V and these faster than
rectangles (we could say they present an increasing
‘rigidity’), all three formation distributions do recover
from deformations, especially when the leader fol-
lows a rectilinear trajectory for some time. They are
also able to restore their topology once the leader
stops. They do it naturally in an ordered manner:
since changes propagate trough the formation, the
successors of the leader are the first ones in reach-
ing their target position, which, corresponds to their
target position in the static formation. And this same
process propagates until the last robot in the forma-
tion reaches its target position, so that the whole for-
mation topology is recovered.
Nevertheless, formations are not kept exactly.
Some delays are introduced due to the propagation of
the movement and robots’ errors do propagate with an
accumulative effect. Next section presents some ex-
periments we have performed with the aim of study-
ing how basic behavior parameters can be set so that
the error keeps as small as possible.
4 PERFORMANCE EVALUATION
In order to evaluate the formation maintenance per-
formance of our different formations, we have consid-
ered an error measure that provides the maximum dis-
tance between robot actual trajectories and the ones
that should have followed instead.
More concretely, for the queue case, every robot
should follow the leader trajectory, and thus we mea-
sure, for each robot, the maximum distance between
its trajectory and the leader’s trajectory. Furthermore,
robots can return to previously visited positions so
Figure 9: Trace of the trajectories of 5 robots in a queue
formation. Leader’s red trajectory is the reference one. Last
robot (veh. 4) has the larger deviation.
that distance measures among trajectories are per-
formed taking time into account. Therefore, we mea-
sure the distance between a robot’s position and the
equivalent position in the leader’s trajectory for this
specific instant.
5 RESULTS
Considering error measurements and behavior para-
meters described in previous sections, we have per-
formed a series of tests about the formation mainte-
nance performance in terms of the resulting error. We
have done it by changing a single parameter for each
test so that we can isolate its influence in the overall
performance.
Figure 9 plots an example of how does perform a
queue formation of 5 robots. In this case, the leader
follows a trajectory that starts with a rectilinear move-
ment, performs a right turning, and ends with a new
straightforward movement. Consecutive robots (veh.
1 to veh. 4) do deviate along the turning and recover
during the second rectilinear movement. For this spe-
cific example, the maximum error is performed by
robot 4 at position (14.6, 29.9) where there is a dis-
tance of 5.37 to the reference leader position (14.03,
24.6). The average error for each of the 4 robots is
0.19, 0.50, 0.85, and 1.5 respectively.
By tuning some parameters, it is possible to re-
duce these performance errors empirically. Due to
the lack of space we cannot present all conducted
studies. Nevertheless, we exemplify error reduction
by presenting the case shown in figure 10. We con-
sider a queue formation composed by 5 robots where
leader performs two consecutive turnings (right turn
first, and left turn afterwards). Accuracy in following
the trajectory (and thus, in maintaining the formation)
ICINCO 2006 - ROBOTICS AND AUTOMATION
286
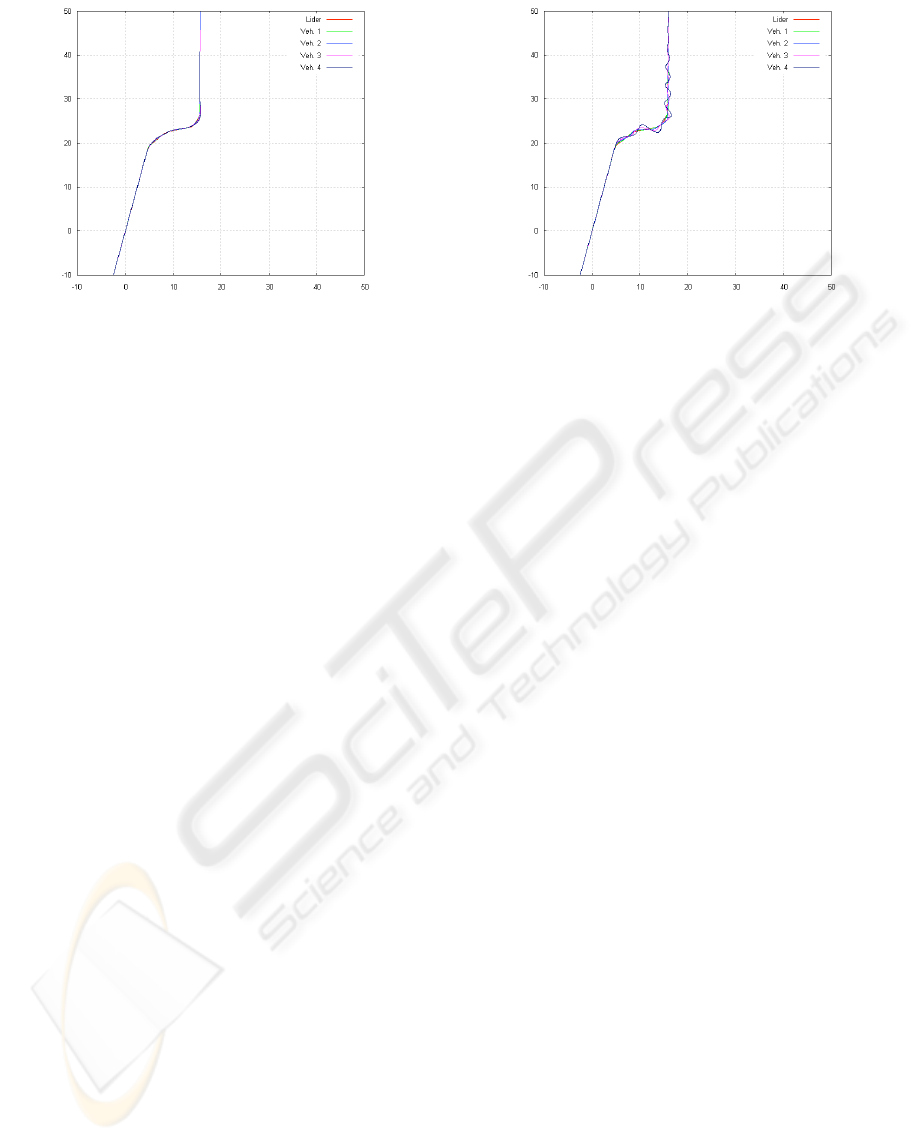
a)
Figure 10: Trajectory traces in a 5- robot queue formation
with braking distance parameter = 2.0.
has visibly increased. In fact, the average error for
each of the 4 robots is 0.03, 0.04, 0.05, and 0.07 re-
spectively. These values can be considered especially
accurate considering that a robot is simulated as a cir-
cle of diameter 1 in OpenSteer environment units.
Getting into more detail, this error reduction has
been accomplished by setting the separation distance
to 4.0 for the “Reference neighbor following” behav-
ior. Although this distance could be thought as a for-
mation parameter rather than a behavior parameter,
our tests have proven that the performance drops con-
siderably when this distance is smaller than 4 times
the size of the robot. This is mainly due to the fact
that, if robots do not have enough maneuverability,
their turns generate oscillations that propagate errors.
Nevertheless, in order to avoid robot losses, sepa-
ration distance values should be proportional to the
maximum separation distance parameter in the “Wait-
ing for the follower” behavior. In our case, this last
parameter has been set to 4.5 so that robots do not
move at high speeds when its successors cannot fol-
low them.
On the other hand, minimum movement distance
parameter has been set to 2.0 for the “Reactivity”
behavior. In general, being this value twice the ro-
bot’s size is enough to prevent for small local oscilla-
tions that do propagate along the formation. Values
higher than that do introduce undesired delays that
result in the deformation of the formation (usually,
elongation). Another parameter that helps in reduc-
ing local oscillations is tolerance. Similarly, it should
be kept small (it has been set to 0.1 in the example) to
avoid global deformation. “Priority respect” behav-
ior does also have parameters that help in the avoid-
ance of undesired situations such as robot losses or
collisions. These parameters are critical stopping and
critical braking distances, which have been set to 2.0
and 3.5 respectively. These values, which must be
b)
Figure 11: Trajectory traces in a 5- robot queue formation
with braking distance parameter = 1.0.
correlated, are applied within an influence angle that
has been set to 90 degrees in order to implement the
right side priority traffic norm.
Finally, braking distance from “Reaching a target
position” behavior has been set to 2.0 in the case
shown in figure 10. This is a key parameter that af-
fects three significant factors. Firstly, braking dis-
tance values do have an overall effect in the forma-
tion that is inversely proportional to the formation ve-
locity: large braking distance values slow down the
whole formation advance (robots start reducing its ve-
locity unnecessary early) whilst small values allow
the formation to advance faster. Secondly, its val-
ues introduce a divergence between the separation
distance that should be kept between robots during
formation displacements and the one that is actually
kept. And thirdly, and most important, braking dis-
tance values do also affect into the accuracy in fol-
lowing the trajectory. On one hand, small values po-
sition robots so near to their target position that they
are not able to react smoothly to turnings, and there-
fore, local oscillations are propagated and amplified
among robots in the formation. On the other hand,
large braking distance values enlarge target positions
distances to an extent that causes robots to perform
rectilinear shortcuts in tunings, and therefore, the ac-
curacy in following the trajectory (and thus, maintain-
ing the formation) is reduced.
Additional experiments have been performed for
this braking distance parameter. In this manner, fig-
ure 11 shows the trace for a formation of 5 robots hav-
ing value equal to 1.0 for this parameter and keeping
those values mentioned before for the remaining para-
meters. In this case, the average error has increased up
to 0.04, 0.07, 0.11, 0.18 for each of the four follower
robots. As mentioned before, if we increase braking
distance values up to 2.0, then errors decrease (fig-
ure 10: 0.03, 0.04, 0.05, 0.07), but it is a minimum,
ROBOT BEHAVIOR ADAPTATION FOR FORMATION MAINTENANCE
287

because if we keep increasing it, accuracy decreases
again. In this case, for example, a breaking distance
value of 3.0 involves average errors of 0.04, 0.5, 0.9,
0.1.
6 RELATED WORK
Multi-agent robotic systems have been intensively
studied by the scientific community over the past
decade ((Brooks et al., 1990) (Johnson and Bay,
1995)). The main reason for this is that, despite the
limitations of single robots for accomplishing general
tasks such as foraging, transportation, construction or
surveillance, these tasks can be successfully achieved
by coordinated groups of robots. Furthermore, some
of these tasks can be outperformed when the group of
robots form specific spatial distributions (Fredslung
and Mataric, 2002a), what it is usually known as ro-
bot formations.
This paper presents a parameterization of basic be-
haviors whose combination yields to the emergence
of a more complex global behavior that consists on
formation maintenance while following a trajectory.
In particular, robots have proven to be able to main-
tain three different formations just by using local in-
formation and without having the concept of forma-
tion explicitly. Local information refers to reference
robots in the neighborhood, similarly to friend ro-
bots in (Fredslung and Mataric, 2002b). Our “Pri-
ority respect” behavior is also analogous to its robot
ID ordering. Nevertheless, following its ‘friendship’
nomenclature, the “Waiting for the follower” behav-
ior results in a more tight double-linked chain (i.e.,
reciprocal-friendship) than the single-linked chain of
friendships of Fredslund and Mataric.
On the other hand, this “Waiting for the follower”
behavior is related to the unsupervised formation
maintenance work by Yamaguchi et al. (Yamaguchi
et al., 2001), where attractions between robots are
symmetrical. As in our case, the validity of their re-
sults was supported by computer simulations, but they
study mathematically the stabilization of the forma-
tion by means of formation vectors that do apply in
the formation creation rather than in the formation
maintenance in movement. These formation vectors
are also related to the attractive and repulsive gradi-
ent forces implemented by Feddema et al. (Feddema
et al., 2004). Their work has a system control per-
spective that focuses on stability rather than, as in our
case, in following accurately a trajectory while main-
taining the formation.
7 CONCLUSIONS AND FUTURE
WORK
Our work is based on the parameterization of basic
behaviors to optimize the performance of robot for-
mations empirically. Despite the potential loss of gen-
erality, this tuning strategy applies for different queue,
inverted V and rectangle formations, and tries to pose
a step forward in the solution of the formation main-
tenance problem when using local information. Fu-
ture work will focus on the way adaptation can be
achieved automatically: since we work on simula-
tions, we envision genetic algorithms as an alterna-
tive, were the set of parameters codify the population
and the error measure can be used as objective func-
tion to be optimized.
ACKNOWLEDGEMENTS
Bernat Grau’s implementation has been key for this
work.
REFERENCES
Balch, T. and Arkin, R. C. (1998). Behaviour based forma-
tion control for multi-agent robot teams. IEEE Rans-
actions on Robotics and Automation, 14(6):926–993.
Bekey, G. A. (2005). Autonomous Robots: From biologi-
cal Inspiration to Implementation and Control. MIT
Press.
Brooks, R. A., Maes, P., Mataric, M. J., and More, G.
(1990). Lunar base construction robots. In Proceed-
ings of IEEE/RSJ International Workshop on Intelli-
gent Robots and Systems (IROS), pages 389–392.
Feddema, J. T., Schoenwald, D., Parker, E., and Wagner,
J. S. (2004). Analysis and Control of Distributed Co-
operative Systems. Sandia Report SAND2004-4763.
Fredslung, J. and Mataric, M. (2002a). A general algorithm
for robot formations using local sensing and minimal
communication. IEEE Transactions On Robotics And
Automation, 18(5).
Fredslung, J. and Mataric, M. (2002b). Robots in forma-
tion using local information. In Seventh International
Conference on Intelligent Autonomous Systems (AIS-
7), pages 100–107.
Johnson, P. J. and Bay, J. (1995). Distributed control of sim-
ulated autonomous mobile robot collectives in pay-
load transportation. Autonomous Robots, 2(1):43–63.
Steer, O. (2004). Steering behaviours for Autonomous
Characters. http://opensteer.sourceforge.net/.
Yamaguchi, H., Arai, T., and Beni, G. (2001). A distributed
control scheme for multiple robotic vehicles to make
group formation. Robotics and Autonomous Systems,
36:125–147.
ICINCO 2006 - ROBOTICS AND AUTOMATION
288
