
HIERARCHICAL MULTI-ROBOT COORDINATION
Aggregation Strategies Using Hybrid Communication
Yan Meng, Jeffrey V. Nickerson, Jing Gan
Stevens Institute of Technology, Castle Point on Hudson, Hoboken, NJ 07030, USA
Keywords: Multi-robot coordination; hybrid communications; aggregation strategy.
Abstract: Multi-robot coordination is important for searching tasks. Usually discussions of this coordination
presuppose a reliable explicit communication infrastructure. However, limited power, low radio range, and
an ever changing environment all hinder communication. Maintaining weakened connections will cause
robots to cluster during searching, which may be suboptimal with respect to the searching time. In this
paper, hierarchical-based aggregation strategies are proposed to coordinate a team of robots with limited
communication. To speed up the reconnection procedure for the proposed aggregate strategies, a hybrid
communication approach is proposed in this paper to establish a movement plan to recover the explicit
communication through vision sensors. Simulation results are presented and discussed. Experiments with 3
Pioneer robots have been conducted, and the experimental results show that our proposed strategies using a
hybrid communication mechanism are feasible and efficient in a searching task. The proposed strategies can
be extended to a large-scale searching environment as well as to a combination of humans and robots.
1 INTRODUCTION
As a community, we would like to be able to deploy
a team of robots to explore the environment in order
to assist in tasks such as searching. Most multi-robot
searching approaches assume that robots will
maintain radio (explicit) communication with each
other during the searching. However, since the on-
board wireless device of each robot has limited
power and a low radio range, producing a well
connected network with these small wireless devices
while maximizing the searching efficiency is a
challenging task, especially in a changing
environment. Mobile ad hoc networks must
continuously deal with the connectivity topology
changing. Robots may fail, robots or other elements
of the environment move around, and weather can
change which nodes are within radio range of each
other.
In an adversary environment, such as combat
environment, continuous radio communication is
easily to be attacked or hacked by the adversary. Or
in a hazardous environment, radio communication
may be very difficult, if not impossible, to perform
well due to the spectrum or signal constraints. Under
these situations, visual communication mode would
be a more appropriate and convenient way for multi
robots.
In the searching task, we eventually want the
robots to integrate information on the success of their
search. If we relax the requirement of constant
connection, the searching task can be conducted in
parallel and has the potential to cover more areas in a
given timeframe. Without planning, however, the
robots might have to search for each other after they
have completed their search and their reconnection
can not be guaranteed.
In human survival manuals, there is a simple
method recommended for coordinating after a
communication loss. Members of a team agree ahead
of time on a place to meet, called a rally point (DOD,
1992). This technique has been studied in relation to
robotic communication in emergencies (Nickerson,
2005). In the area of robotic search, the use of a
rendezvous between two searching robots at a pre-
arranged spot has been studied (Roy, 2001), drawing
from work in the theory of search games (Alpern &
Gal, 2003).
As we know, the longest searching time of a
mobile robot is totally depends on the on-board
battery. To extend the searching time of the overall
multi robot system, a power-efficient hierarchical
architecture is proposed in this paper. Based on this
architecture, several heuristic aggregation strategies
are proposed to manage the coordination between a
team of searching robots which had difficulty to
communicate. To speed up the integration procedure
289
Meng Y., V. Nickerson J. and Gan J. (2006).
HIERARCHICAL MULTI-ROBOT COORDINATION - Aggregation Strategies Using Hybrid Communication.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 289-295
DOI: 10.5220/0001212802890295
Copyright
c
SciTePress

when robots have lost radio communication, a hybrid
communication approach combining implicit
communication via vision with explicit
communication via radio is proposed. When radio
communication is broken, vision is applied to
establish a movement plan to get back into radio
connection.
2 RELATED WORK
Extensive research has been carried out on the topics
of multi-robot coordination, where communication is
critical for the success of coordination. In general,
the communication mechanism can be classified into
two categories: implicit communication and explicit
communication.
Implicit communication transmits information
through the environment or through the observation
of behaviors of other robots. Some research has been
conducted on the implicit communications (Arkin,
1992; Balch, 1994; Kuniyoshi, 1994) in multi-robot
system. Arkin (1992) indicated that explicit
communication is not always required to achieve an
increase in utility. In a follow-up study (Balch, 1994),
he concludes that "(Explicit) communication is not
essential in tasks which include implicit
communication" but that "(Explicit) communication
improves performance significantly in tasks with
little environmental communication."
(Roy and Dudek, 2001) addressed the rendezvous
problem of two heterogeneous robots with limited
communication range exploring unknown
environments. The basic idea of their approach is
that the robots have an agreed-on notion of what
constitutes a good rendezvous point. At a pre-
arranged time, the robots go to the best rendezvous
point, and wait for the other robots to arrive. They
can then fuse their map and suitably partition any
remaining exploration to be done.
Most previous work in multi-robot coordinate
relies on explicit communication to keep robots in
communication with each other (e.g. (Hu, 1998;
Pimentel, 2003)). However, in related empirical
work, it is known that the CRASAR teams at the
World Trade Center had a difficult time
communicating with their robot since at the World
Trade Center, 25% of communication between
wireless robot and control unit was extremely noisy
and therefore useless. Bandwidth problems, loss of
communication resulted in the loss of one robot
(Murphy, 2004).
One way to enhance the communication reliability
is to proactively adjust a robot’s behaviors to try to
avoid communication failure before it occurs (Arkin,
2002; Sweeney, 2002; Anderson, 2003). This method
relies on maintaining a clear line of sight between the
communicating robots. Another way is to design a
reactive approach to deal with the network failure
when it occurs so that the network can be recovered
(Ulam, 2004; Dias, 2004).
Some research has focused on architectures for
multi-robot cooperation. Grabowski et al.
(Grabowshi, 2000) consider teams of miniature
robots that overcome the limitations imposed by their
small scale by exchanging mapping and sensor
information gathered by the other robots. In this
architecture, a team leader integrates the information
gathered by the other robots. Furthermore, the leader
directs the other robots to move around obstacles or
sends them to unknown areas. Stroupe et al. (Stroupe,
2004) recently presented the MVERT-approach.
Their system uses a greedy approach that elects
robot-target pairs based on proximity. The goal of
the action selection is to maximize cooperative
progress toward mission goals.
3 AGGREGATION STRATEGIES
We assume a team of heterogeneous mobile robots
working cooperatively to explore an environment
with a preliminary map, seeking for randomly
scattered targets, where the number of the targets is
given in advance. Due to the large scale of robot
systems and large scale of the searching area, a team
of robots are divided into several sub-teams, where
each sub-team has one host and several searching
robots locally connected with short-range mobile ad
hoc network. The global communication between
the sub-team can be conducted via long-range mobile
ad hoc network between the hosts, which is shown in
Fig.1. The host robot integrates the information from
its local searching robots, and sends this collected
information to other hosts. This hierarchical
communication mechanism is power-efficient since
only low-power communication is needed for each
sub-team.
Host
3
Host
2
Host
1
Figure 1: A hierarchical structure of multi-robot system in
a searching task.
ICINCO 2006 - ROBOTICS AND AUTOMATION
290

The host robots make high-level decisions, such as
task assignments, global map building, global target
information, whereas the searching robot only holds
local perceptual data and the hosts’ status. The
robots will be dispersed to different searching areas
looking for the randomly scattered targets. The
objective is to minimize the searching time, which is
defined as the time from the starting point to the time
when the host robot receives all of the information of
the expected targets.
3.1 Static Rally Point (SRP)
Approach
Without any plan, disconnected robots might search
at random for targets, and then search at random to
find each other and compare results. Such a
technique is obviously inefficient, and so we look for
a simple organizing principle.
In the first strategy, for each sub-team, all
searching robots which have lost communication
move to a rally point when they have finished their
own searching area. At the rally point, all the
information will be exchanged and collected by the
host robot. Assuming an ad-hoc network, the robots
do not have to physically meet the host or each other,
but might stop moving at the point at which they
connect to the rally point. We call this strategy the
static rally point (SRP).
The location of the rally point for each sub-team
depends on the environment and the rally points of
other sub-teams. Usually these rally points should
be set up within the long-range communication area
between the hosts. The host assigns different
searching areas to each robot, and each robot uses its
path planner to cover their assigned area, and moves
to the rally point as soon as it finishes its searching
area or finds a target, whichever comes first. In this
approach, the host robot for each sub-team is located
on the rally point for information integration, and
does not move after stationing itself.
3.2 Mobile Rally Point (MRP)
Approach
The SRP strategy is simple to implement, but it lacks
flexibility for different target distribution
environments, especially for large scale searching
areas. Therefore, we consider a mobile rally point
(MRP) strategy. In this technique a mobile host robot
for each subteam fulfills the function of a rally point.
All of the other robots periodically reconvene at the
host robot at pre-assigned times in order to integrate
the searching information. Effectively, the robots
perform a series of synchronizations. The searching
task will be finished when the host robot has the
information of all the expected targets after a
reconvening session, which may happen before the
entire field has been explored.
To synchronize with other hosts, the navigation
path for each mobile host needs to be developed so
that the distances between the hosts are within the
long range of communication during the reconvening
session.
The overall sense of search progress of MRP will
be achieved at defined times and the hosts only need
to communicate with each other during the
reconvening session. However, robots may need to
move back and forth to the rally point more often,
which may be wasteful of energy, leading us to
consider a third strategy.
3.3 Mobile Integrator (MI)
Approach
The third strategy, which we call the mobile
integrator (MI), is designed to minimize unnecessary
movement. Only the robot who detects a target or
multiple targets will move toward and inform the
moving host robot, otherwise it will continue its own
searching task. The destination of the mobile
integrators are setup at the some preset points of the
searching area, and the host robots move
continuously and slowly throughout the search effort,
attempting to stay in the middle of the searching
crowd within each sub-team. The stop searching
command will be sent out by the host when the
searching task is over if the robots are within the
communication range, otherwise, the searching
robots will eventually stop at the preset points.
Notice that this strategy involves a tradeoff; there
will be less movement than in the previous strategy,
but at any particular time there may be less certainty
about the progress of a search and the location of the
robots as compared to the second strategy, in which
the robots synchronize periodically.
Compared with MRP method, communication cost
of MI method is higher, and the travel cost is lower.
Since movements usually consume much power than
communication, the overall power consumption of
MI should be less than MRP.
3.4 Mobile Integrator with Time-Out
(MITO) Approach
In MI approach, in the case when a searching robot
detects a target at a very early stage and then informs
the host, if the explicit communication between the
HIERARCHICAL MULTI-ROBOT COORDINATION - Aggregation Strategies Using Hybrid Communication
291
robot and the host is not available when the host
sends out the “game over” command, the robot may
search around for a long time before it finally
approaches the exit point. In order to save the energy
of the searching robot, we propose a fourth strategy,
which we call Mobile Integrator with Time-Out
(MITO), to minimize unnecessary movement after
the task is over.
The strategy is similar to the MI approach, except
that the searching robot moves toward the host for
more target information after a predefined time-out.
This time-out period may be set up according to the
size of the environment or the number of the targets.
With this time-out feature, the searching robot may
lessen the amount of unnecessary searching.
4 HOST POSITION ESTIMATION
It would be good if the searching robots could
estimate the position of the host of each sub-team
upon aggregation time. It is possible for the
searching robot to predict the host position at any
given time based on the initial planed path
information broadcasted by the hosts before
searching, with the assumption that the host robot
always moves at the same given speed.
To function effectively with an underlying
obstacle avoidance algorithm, the wavefront path
planner only transmits waypoints, not the entire path.
The wavefront planner finds the longest straight-line
distances that don't cross obstacles between cells that
are on the path. The endpoints of these straight lines
become sequential goal locations for the underlying
device driving the robot.
SP (Xs, Ys)
WP1
(X
1
, Y
1
)
WP2
(X
2
, Y
2
)
WP3
(X
3
, Y
3
)
GP (Xg, Yg)
1
θ
2
θ
3
θ
4
θ
x
y
o
global coordinate
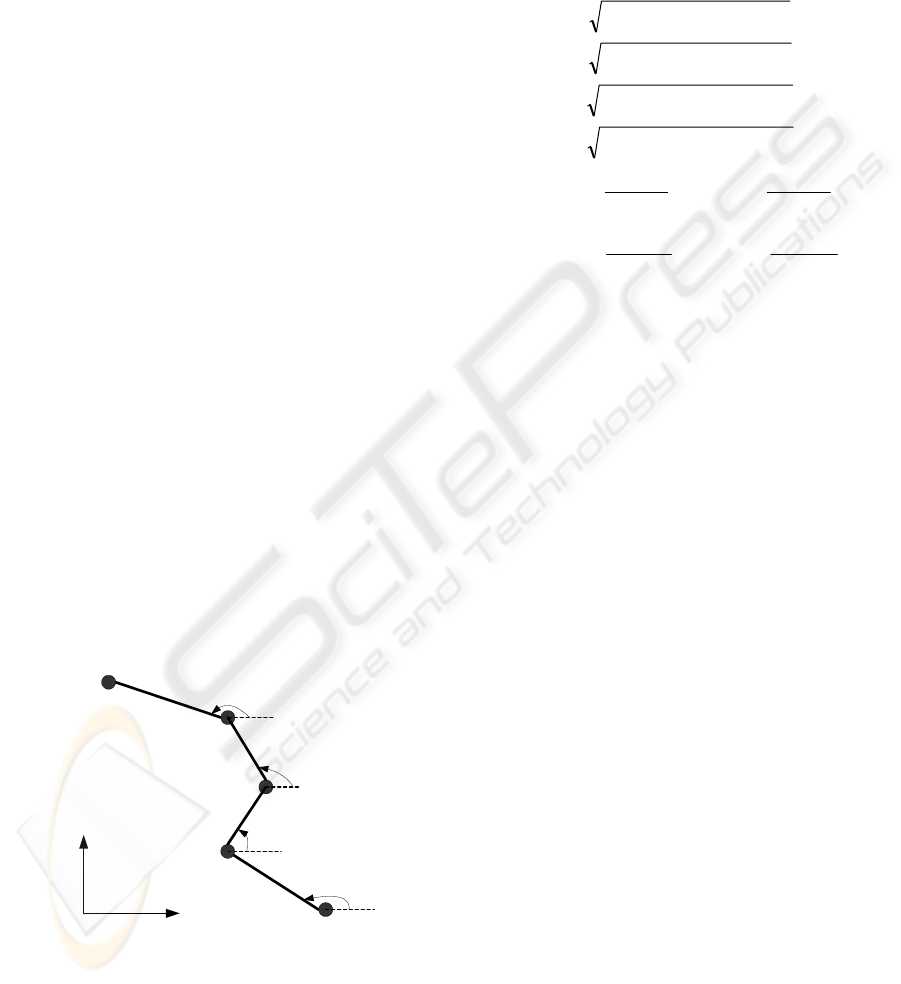
Figure 2: Initial planned path with three waypoints for host
robot at the entrance, where WP stands for waypoint, SP
stands for starting point, and GP stands for goal.
Assume that there are three waypoints in the initial
planed path for host robot, as shown in Fig. 2. The
time intervals between starting point to waypoint,
waypoint to waypoint, and waypoint to goal point
can be obtained by Equation (1) and the angles
between the x-axis of the global coordinate and
different waypoint phase can be obtained by
Equation (2).
vyyxxt
ss
/)()(
2
1
2
11
−+−=Δ
vyyxxt /)()(
2
12
2
122
−+−=Δ
vyyxxt /)()(
2
23
2
233
−+−=Δ
vyyxxt /)()(
2
34
2
344
−+−=Δ (1)
,,
12
12
2
1
1
1
xx
yy
arctg
xx
yy
arctg
s
s
−
−
=
−
−
=
θθ
.,
3
3
4
23
23
3
xx
yy
arctg
xx
yy
arctg
g
g
−
−
=
−
−
=
θθ
(2)
Then the estimated position of the host robot at time t
can be obtained by the following equation.
11
1
sin)(,cos)(
when
θθ
vtytyvtxtx
tt
ss
+=+=
Δ≤
2121
21
sin)(,cos)(
twhen
θθ
vtytyvtxtx
tt
+=+=
Δ≤≤Δ
3232
32
sin)(,cos)(
twhen
θθ
vtytyvtxtx
tt
+=+=
Δ≤≤Δ
4343
43
sin)(,cos)(
twhen
θθ
vtytyvtxtx
tt
+=+=
Δ≤≤Δ
(3)
Since it takes time for the searching robot to
catch up with the mobile host, it would not be
appropriate for the searching robot to set the host’s
current estimated location as the destination. Instead,
the searching robot has to predict the travel time to
the current host position from its current position,
and predict the host’s future location with this travel
time interval, and set up this host’s future location as
its new path destination.
The prediction of the time interval from the
searching robot to current location of the host, and
the estimation of future location of host can be
computed in a way similar to what is shown in Fig. 3.
If the environment dynamically changes, then the
above approach may not be able to obtain the
expected results. To minimize the accumulated
estimation error, the host would always inform all the
searching robots its current waypoint plan during
every aggregation time.
ICINCO 2006 - ROBOTICS AND AUTOMATION
292
5 A HYBRID COMMUNICATION
APPROACH
The above approach may not be able to obtain the
expected results since the initial path may be
modified due to the dynamic environmental changes,
such as some unexpected obstacles or mobile robots
on its way. A hybrid communication is proposed in
this section, where communication via vision is
applied to help in detecting and locating the host in
order to accelerate the reconnection of the radio
communication.
If the radio channel of a searching robot is broken
due to the weak radio signals or traffic jams, and the
host is still within the visual range of the searching
robot, the visual channel can detect and track the host
and guide the searching robot toward the host until
radio communication is reestablished. Sometimes,
even if the radio communication cannot be
reestablished at a very short distance, the visual
channel at least can prevent the searching robot
moving further from its teammates, so that once the
communication is available again, the robot can
exchange information immediately.
However, the vision system does not always help
in some environment, such as a highly object density
environment. Sometimes, for a very large scale
multi-robot system, the robot vision system might
often be blocked by other mobile robots if they are
not distributed far way. Under these situations, the
hybrid approach would not be faster (but would also
not be slower) than a pure radio communication
approach.
6 SIMULATION AND
EXPERIMENTAL RESULTS
6.1 Simulation Results of Hybrid
Communications
To evaluate the hybrid communication approach, a
simple proof-of-concept simulator was written using
C/C++ under Windows environment, where only two
robots are simulated: one is a lost robot and the other
is a networked robot. A city grid simulation
environment is setup, where the area is 16m by 16m
square with nine 4m by 4m square block evenly
distributed and 1m width streets in between. The lost
robot and the networked robot are distributed
randomly on the grid at their starting points. Then
both move at a speed of 1m/step to a preset
rendezvous point while searching for each other on
their way.
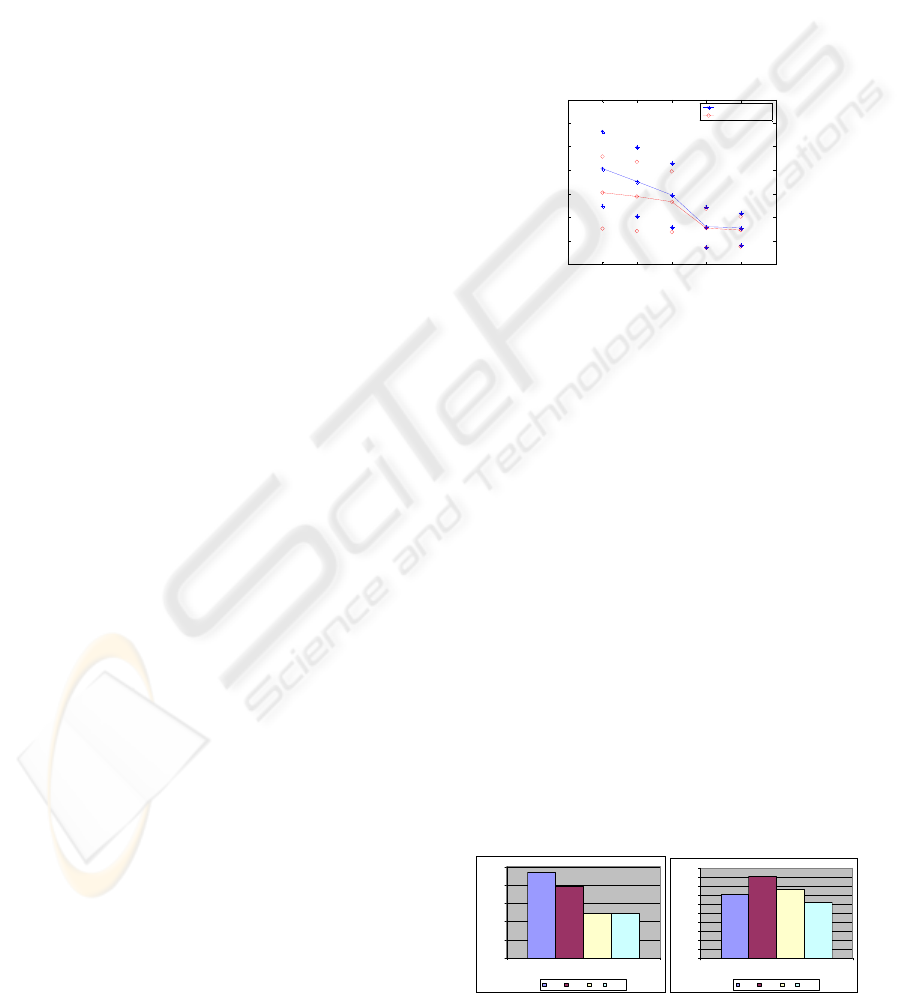
The simulation results with different radio ranges
are depicted in Fig. 3(b), using 100 runs for each
radio range. It can be seen that the recovery times
tends to decrease with increasing radio ranges. There
are diminishing returns once the radio coverage has
increased beyond a size where participants are likely
to connect to each other quickly.
It is noted that the scalability of the proposed
hybrid communication is limited because the chance
the robot field of view is being blocked by other
mobile robots increase dramatically with a very large
scale multi robot system.
0 1 2 3 4 5 6
-5
0
5
10
15
20
25
30
Radio radius (m)
Recovery Time (steps)
mean(radio-only)
mean(radio-vision)
Figure 3: Means (joined by lines) and standard deviation
values (unjoined points) of recovery times with different
radio radius when the vision radius is 15m.
6.2 Simulation Results of Aggregate
Strategies
To apply the proposed aggregate strategies to a large
scale multi-robot system, searching simulations using
10 robots are carried out. These 10 robots are
divided into two sub-teams, each sub-team has one
host and four searching robots. The searching area is
set up as an office building with 20 office rooms and
three targets are randomly distributed within these
office rooms. 100 target configurations are randomly
generated, and for each configuration, four
approaches, SRP, MRP, MI, and MITO, are
conducted. The power consumption for each robot is
calculated as
)(*)(*)(
21
tcktdktP
+
=
(4)
where d(t) denotes the travel distance, c(t) denotes
communication power consumption.
1
k and
2
k are
coefficients. The simulation results are shown in Fig
4.
0
5
10
15
20
25
Aggregate Strategies
Average Searching Time (seconds)
SRP MRP MI MITO
0
5
10
15
20
25
30
35
40
45
50
Aggregate Strategies
Power Consumption
SRP MRP MI MITO
Figure 4: (a) average searching time comparison; (b)
average power consumption comparison.
HIERARCHICAL MULTI-ROBOT COORDINATION - Aggregation Strategies Using Hybrid Communication
293
The MITO approach outperforms other three
approaches in both average searching time and power
consumption. These simulation results demonstrate
that the proposed aggregate strategies are efficient
and scalable to a large scale multi-robot system.
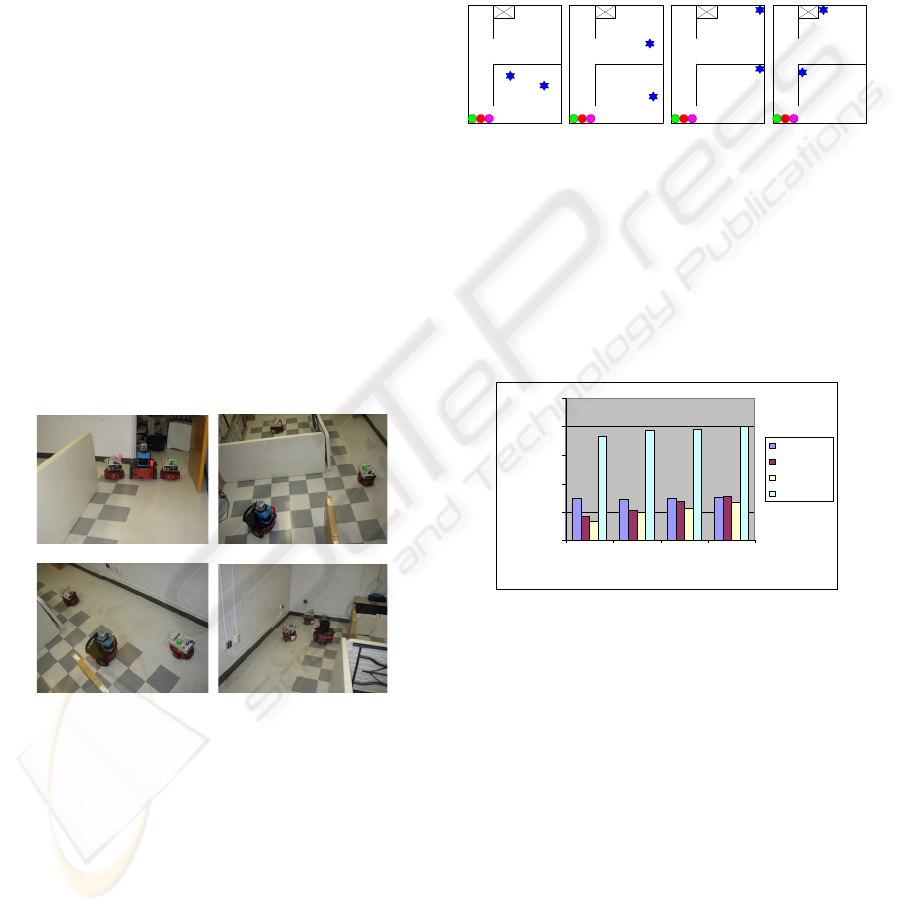
6.3 Experimental Results of
Aggregate Strategies
The experiments are conducted in a small lab area
(6m x 8m). Three mobile robots are used: one
Pioneer 3DX equipped with a pan-tilt-zoom camera,
laser range finder, and 16 sonars, and two Centirbots
where each is equipped with a camera and 8 sonars.
The communication between the robots is wireless.
The radio range is setup as 1m, which can be easily
configured by exchanging the current location
information between the robots. When the distance
between each other is greater than 1m, the robots
assume that the communication failure happens;
otherwise, they are connected. Different color
cylinders are installed on top of each robot for robot
recognition using vision. The vision system can
detect the color cylinders anywhere inside the lab.
The moving speed is setup at 0.1m/sec for Pioneer
3DX and 0.05m/second for Centribots. Fig. 5
shows some snapshots of experiment using MI
strategy.
(a) Start from entrance (b) Dispersed searching
(c) Finish searching (d) Aggregation
Figure 5: Snapshot of experiment using MI strategy.
The pioneer 3dx is first running around to build
the environment map and send this map to other
robots. Each robot can localize itself (Fox 1999) at
any time based on this map. And each robot also has
the navigation algorithm (Ulrich, 1998) installed to
move from one point to the destination point.
We assume that all of the robots are initially
connected through an ad hoc network and located at
the entrance, which is on left-bottom corner, and
eventually they reconvene at the left-top corner. The
period of reconvening of MRP is set at 2 minutes. A
random search approach is also conducted in the
experiment for performance comparison. Since the
MITO approach would have the same searching time
with MI approach, only MI approach is conducted on
the experiment.
As the searching performance of the MRP and the
MI strategies depends on the target distribution, four
different target distributions are manually designed in
Fig. 6, where blue stars are targets and color circles
are robots.
case 2 case 3 case 4case 1
Figure 6: Different target distributions.
15 runs for each strategy were carried out on each
configuration. To speed up the experiments, 20
minutes is set as the maximum searching time. Any
experiments which exceed 20 minutes are treated as
20 minutes long. The experimental results are
depicted in Fig. 7. The x-axis shows the 4 different
configurations of target distribution, whereas the y-
axis depicts the average searching time.
0
5
10
15
20
25
1234
Configurations
Average Searching Time
(Minutes)
SRP
MRP
MI
RANDOM
Figure 7: Experimental results of three integration
strategies working on different target distributions.
From Fig. 7, it can be seen that, generally, the
searching times with proposed strategies have been
significantly reduced compared to those without any
strategy. The performance of MI overcomes the
other two strategies for all four target distributions.
When the targets can be detected on the early stage
of the searching, such as in case 1, the MI and MRP
have much better performance than the SRP due to
the mobility of their host, while the robots have to
wait until the rendezvous at a fixed point to learn of
the detection in SRP.
It is worth noting that although MRP may have
worse performance than SRP under some conditions
in the searching environment as in Fig. 6, the
mobility attributes of the MRP and the MI strategies
ICINCO 2006 - ROBOTICS AND AUTOMATION
294

would provide significant performance advantages
over SRP if the searching environment increases to a
large scale space. In a large scale space, the latency
caused by the SRP might create too much anxiety
back at the base. However, if a robot is abducted or
malfunctions, it is easier to detect with SRP and MRP,
while it would be difficult for the MI strategy since
there is no mandatory checkpoint, and the MITO
approach accommodates this drawback.
7 CONCLUSIONS
In this paper, four aggregation strategies are
presented for coordinating a team of robots with
limited communication power in a searching task. To
improve the efficiency of the searching procedure,
we distribute the robots in the environment as far as
possible to cover the whole area, aware we are
breaking the communication link, and let them
reconvene at some point to exchange information.
Our integration strategies have been implemented
and tested in experimental runs under different target
distribution environments using three real-world
mobile robots. Experimental results presented in this
paper suggest that our techniques can significantly
reduce the searching time with different degrees of
efficiency comparing to the randomly searching
approach. Our experiments suggest that MI has the
best search time performance compared to MRP and
SRP.
The future research topic will extend the searching
task in an unknown environment, where machine
learning techniques will be applied to learn the
environment and adaptively response to the
environment changes.
REFERENCES
Alpern, Steven; Gal, S. (2003) The Theory of Search
Games and Rendezvous. International Series in
Operations Research and Management Science, Vol.
55. Kluwer Academic Publishers,
Anderson, S., Simmons, R., & Goldberg, D. (2003).
Maintaining line of sight communications networks
between planetary rovers. Proceedings of the
Conference on Intelligent Robots and Systems (IROS).
Arkin, R.C. (1992). Cooperation without communication:
multiagent scheme-based robot navigation. J. Robotic
Systems, 9(3):351-364.
Arkin, R.C. & Diaz, J. (2002). Line-of-Sight constrained
exploration for reactive multiagent robot teams. in
AMC 7
th
International Workshop on Advanced Motion
Control.
Balch, T, & Arkin, R.C. (1994). Communication in
reactive multiagent robotic systems. Autonomous
Robots, 1(1), pp. 27-52.
Dias, M., Zinck, M., Zlot, R., and Stentz, A. (2004).
Robust Multirobot Coordinate in Dynamic
Environments., in Proceedings of IEEE International
Conference on Robotics and Automation, pp.3435 –
3442.
DOD (1992). US Army Survival Manual: FM 21-76. US
Department of Defense.
Grabowski, R., Navarro-Serment, L.E., Paredis, C., and
Khosla, P.K. (2000). Heterogeneous teams of modular
robots for mapping and exploration. J. Autonomous
Robot., vol. 8, no. 3, pp. 293-308.
Fox, D, Burgard, W, Dellaert, F, & Thrun, S. (1999).
Monte Carlo Localization: Efficient Position
Estimation for Mobile Robots. AAAI.
Hu, H, Kelly, I, Keating, D., & Vinagre, D. (1998).
Coordination of multiple mobile robots via
communication. Proceedings of SPIE’98 Mobile
Robots XIII Conference, pp. 94-103.
Kuniyoshi, Y, Rougeaux, S., Ishii, M., Kita, N., Sakane, S.
& Kakikura, M.. (1994). Cooperation by observation –
the framework and basic task patterns-. In Proc. IEEE
Int. Conf. Robotics and Automation, pp. 767-774.
Murphy, R. (2004). Human-Robot Interaction in Rescue
Robotics. IEEE Systems, Man and Cybernetics Part C:
Applications and Reviews, special issue on Human-
Robot Interaction, Vol. 34, No. 2.
Nickerson, J. V. (2005). A Concept of Communication
Distance and its Application to Six Situations in
Mobile Environments. IEEE Transactions on Mobile
Computing, Vo. 4, No.5, Sept./Oct. 2005, pp. 409-419.
Pimentel, B.S. & Campos, M. (2003). Cooperative
Communication in Ad Hoc Networked Mobile Robots.
Proceedings of 2003 IEEE/RSJ Intl. Conference on
Intelligent Robots and Systems, pp. 2876-2881.
Roy, N; Dudek, G. (2001). Collaborative robot exploration
and rendezvous: algorithm, performance bounds and
observations. J. Autonomous Robot., vol. 11, no. 2, pp.
117-136.
Stroupe, A.W., Ravichandran, R., & Balch, T. (2004).
Valued-based action selection for exploration and
mapping with robot teams., in Proc. IEEE Int. Conf.
Robot. Autom. (ICRA), 2004, PP. 4190-4197.
Sweeney, J., Brunette, T., Yang, Y., and Grupen, R. (2002).
Coordinated teams of reactive mobile platforms. in
Proc. of IEEE Int. Conf. on Robotics and Automation,
2002, pp. 299-304.
Ulam, P., & Arkin, R.C. (2004). When good comms go bad:
communication recovery form multi-robot teams. Proc.
2004 IEEE Int. Conf. on Robotics and Automation,
New Orleans, LA, May. 2004.
Ulrich, I & Borenstein J. (1998). VFH+: Reliable Obstacle
Avoidance for Fast Mobile Robots. in Proceedings of
the International Conference on Robotics and
Automation (ICRA’98), Belgium.
HIERARCHICAL MULTI-ROBOT COORDINATION - Aggregation Strategies Using Hybrid Communication
295
