
ROBUST MULTI-ROBOT COOPERATION THROUGH DYNAMIC
TASK ALLOCATION AND PRECAUTION ROUTINES
Sanem Sariel
Istanbul Technical University, Computer Engineering Department, Maslak, Istanbul, Turkey
Tucker Balch
Georgia Institute of Technology, College of Computing, Atlanta, GA, USA
Nadia Erdogan
Istanbul Technical University, Computer Engineering Department, Maslak, Istanbul, Turkey
Keywords:
Distributed AI, robotics, multi-agent systems.
Abstract:
In this paper, we present the design and implementation of a multi-robot cooperation framework to collectively
execute inter-dependent tasks of an overall complex mission requiring diverse capabilities. Given a heteroge-
neous team of robots and task dependencies, the proposed framework provides a distributed mechanism for
assigning tasks to robots in an order that efficiently completes the mission. The approach is robust to unreli-
able communication and robot failures. It is a distributed auction-based approach, and therefore scalable. In
order to obtain optimal allocations, effective bid evaluations are needed. Additionally to maintain optimality
in noisy environments, dynamic re-allocations of tasks are needed as implemented in dynamic task selection
and coalition maintenance scheme that we propose. Real-time contingencies are handled by recovery routines,
called Plan B precautions in our framework. Here, in this paper, we present performance results of our frame-
work for robustness in simulations that include variable message loss rates and robot failures. Experiments
illustrate robustness of our approach against several contingencies.
1 INTRODUCTION
We propose Distributed and Efficient Multi Robot
- Cooperation Framework (DEMiR-CF) for multi-
robot teams that must cooperate/coordinate to achieve
complex missions including tightly coupled tasks that
require diverse capabilities and collective work. It
combines auctions, coalition maintenance scheme
and recovery routines called Plan B precaution rou-
tines to provide an overall system that finds (near-)
optimal solutions in the face of noisy communication
and robot failures. The efficiency of our framework
was tested for the multi-robot multi-target explo-
ration problem in an earlier work (Sariel and Balch,
2006). In this paper, we evaluate the performance
of the framework for robustness on complex missions
against several noisy or faulty situations. The Plan B
precaution routines embedded in the framework en-
able the system to dynamically respond to the contin-
gencies and still complete the mission. The proposed
framework strives to provide (near-) optimal task al-
locations with effective bid evaluations while simul-
taneously and effectively responding to contingencies
and maintaining the solution quality.
Multi-robot coordination problem has been an ac-
tive area of research where both centralized and dis-
tributed approaches are considered. In most cases, the
selected domain missions include independent sub-
tasks which can be executed by a single robot. Due
to the real world requirements and issues of robust-
ness, the centralized approach has usually not been
successful in these implementations. The distributed
approach and, specifically when complemented with
the auction based methods based on Contract Net Pro-
tocol (Smith, 1980), shows great promise for multi-
robot task allocation because of its scalability. The
task allocation problem in the face of environmen-
tal changes and the optimality analysis are investi-
gated separately on earlier distributed systems. Ac-
cording to (Dias et al., 2005), existing market mech-
anisms/auction based approaches are not fully capa-
ble of re-planning task distributions, changing the de-
composition of tasks continually, rescheduling com-
mitments, and re-planning coordination during exe-
cution. Our research aims at addressing these short-
comings.
Even though task allocation issues have been stud-
ied extensively, there is not yet a complete frame-
196
Sariel S., Balch T. and Erdogan N. (2006).
ROBUST MULTI-ROBOT COOPERATION THROUGH DYNAMIC TASK ALLOCATION AND PRECAUTION ROUTINES.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 196-201
DOI: 10.5220/0001212901960201
Copyright
c
SciTePress

work which is fully capable of integrating task allo-
cation into real time execution for complex missions.
A classification for multi-robot task allocation prob-
lem and a review of the existing approaches are given
in (Gerkey and Mataric, 2004). According to this
classification, our framework lies in the single-task
robots, instantaneous assignment with time-extended
view of the problem and multi-robot tasks horizon.
Contingency handling is not directly integrated into
task allocation and execution in earlier frameworks.
Our work differs at this point, as it integrates con-
tingency handling into task allocation and achieves a
dynamic allocation scheme through the task execu-
tion. The framework maintains allocation (near-) op-
timality during task execution, even in the presence of
noisy and/or faulty conditions.
2 FRAMEWORK OVERVIEW
DEMiR-CF is designed to address complex missions
of tightly coupled tasks requiring diverse capabili-
ties and simultaneous and synchronous task execu-
tion. Optimal solutions are sought using effective
bid evaluation strategies. The framework also effec-
tively responds to limited or noisy communications
and robot failures during execution. These failures are
recognized by Plan B precaution routines and corre-
sponding actions are taken. Dynamic task selection
and Coalition maintenance scheme provide task (re-
)allocations to maintain the solution quality. Each
robot equipped with DEMiR-CF software executes a
part of the domain mission, achieving allocation, exe-
cution and system consistency maintenance in a fully
distributed fashion without a central coordinator. Our
system relies on a set of task dependencies that are
compiled a priori by a mission commander, or gen-
erated by a planner. The task dependencies, a speci-
fication of the mission, and a specification of the ro-
bot teams’ capabilities are distributed (reliably) to the
robots before the mission execution begins. At that
point, each robot autonomously decides which task to
execute and negotiations are implemented in a fully
distributed fashion.
2.1 Task Representation
One of the important mechanisms of the framework is
the guaranteed validity of the generated plans for exe-
cuting tasks by robots. Although there is not a central
planner, the robots execute tasks by considering de-
pendencies among them. We use a simple represen-
tation for tasks with ordering and dependency con-
straints, similar to but simpler than some representa-
tions in TAEMS (Decker, 1996). We consider hard
(h − dep) and soft dependencies (s − dep). If task T
2
is hard dependent on the task T
1
, it cannot be executed
before the task T
1
is completed. In this case, there is
a strict ordering between tasks. If the task T
2
is soft
dependent on the task T
1
, it can be executed while the
task T
1
is being executed or before its execution be-
gins. However the task T
2
cannot be completed until
the task T
1
is completed. Therefore some portions of
the two tasks can be executed simultaneously. The re-
quired capabilities and the number of robots required
to execute the task are also encoded into the represen-
tation. Robots, which lack the necessary capabilities
for a task, are not eligible for executing and do not
consider such tasks for execution. A task can only
be executed when the required number of robots are
assigned to execute.
2.2 Roles
Some tasks may require simultaneous performance by
a group of robots. We have chosen the coalition or-
ganizational paradigm to organize the task execution.
(Horling and Lesser, 2005). These coalitions can con-
tain one or more robots according to the number of
robots required to execute tasks. Members of coali-
tions are selected by auctions. The auctioneers are
also active robots in the system. The overall objec-
tive is completing a mission (M) consisting of tasks
T
i
(0 < i ≤ ||M||) with a multi-robot team (r
j
∈ R,
0 < j ≤ ||R||) in a cost optimal manner. Each coali-
tion (C
i
) is formed to execute a task T
i
of the over-
all mission M . Sizes of coalitions vary according to
the required number of robots (reqno
i
) to execute the
task. The capabilities (cap
j
) of each robot r
j
in a
coalition should be a superset of the required capabil-
ity set for the task T
i
(reqcap
i
) to be eligible. A ro-
bot (r
j
) may take different roles for the task T
i
, such
as auctioneer, bidder (B
ij
), coalition leader (CL
i
) or
coalition member (CM
i
) during runtime.
• An Auctioneer robot is responsible for managing
auction negotiation steps and selecting reqno
i
suit-
able members of a coalition.
• A Bidder robot is a candidate to become a member
of a coalition to execute a task.
• A Coalition Leader is the robot responsible for
maintaining the coalition and providing synchro-
nization while performing the coalition task.
• A Coalition Member is one of the members of the
coalition, and it executes a portion of the task.
A robot r
j
may be in more than one B
ij
roles for dif-
ferent tasks, but may not be in more than one role of
auctioneer, CM
i
or CL
i
at the same time. The auc-
tioneer is responsible to select the required number of
robots (the coalition leader and members) for task ex-
ecution. The auctioneer may or may not take place in
ROBUST MULTI-ROBOT COOPERATION THROUGH DYNAMIC TASK ALLOCATION AND PRECAUTION
ROUTINES
197

the coalition for which it offers an auction. The coali-
tion leader maintains the coalition and keeps track of
the members’ conditions and their updated informa-
tion. After the execution of the task is completed, the
coalition ends. Each robot is allowed to take part in
only one coalition until it leaves the coalition. Coor-
dination between coalition members is implemented
through synchronization messages. We assume that
robots are not able to infer the state of others by obser-
vation; although such capabilities would only provide
more reliability (e.g. (Balch and Arkin, 1994)).
2.3 Precautions
To deal with the uncertainties that may arise due to
message losses, each robot keeps track of the models
of the known tasks and the other robots in its world
knowledge. The current statuses of the known tasks
are represented in finite state machines (FSM). The
state transitions are initiated either by own motiva-
tions or incoming information from the other robots.
There are eight task states in each FSM. Initially all
tasks are in free state, meaning that none of the ro-
bots is executing/auctioning and they are not achieved
yet. Then, according to the status of the task, the state
can be specified as: auctioned, selected, ready for ex-
ecution, awarded, being executed by own/others, or
achieved. When messages are received from the other
robots, the task and robot models are updated accord-
ingly. In some cases a new message may imply a con-
flict with the robot’s current model of the task state.
In this case, the appropriate precaution routines are
activated to either correct the model, or initiate a re-
covery. Recovery operations may include warning the
other robots or changing the task states and dynami-
cally switching among tasks if profitable. Such incon-
sistencies usually arise when robots are not accurately
informed about the tasks that are completed, under ex-
ecution, or under auction. It is assumed that robots are
trusted and benevolent.
To keep consistency, each robot executing a task
is responsible for broadcasting an execution message,
informing others that the task is under execution and
the robot is alive. Thus, robots are informed about
the task and they assume that the task is under exe-
cution for a period of time. If a robot does not re-
ceive any messages related to a task for a certain pe-
riod of time, the task is assumed to be free. Robot
failures are detected by checking the latest commu-
nication information with the robot. When parallel
auctions for the same task are detected, the robot with
the minimum cost value continues the auction negoti-
ation processes. After receiving an auction message,
a robot checks the validity of the auction by consider-
ing the task information before sending its bid value.
If the robots get an auction offer for a task that has
hard dependencies, then it assumes that these depen-
dent tasks are also achieved and the own world knowl-
edge is updated respectively. Similar update actions
are carried out when execution, cancellation messages
are received.
For synchronized coordination, the coalition leader
sends synchronization messages to all coalition mem-
bers. These messages are also used for recognizing
failures. The leader also receives the updated cost in-
formation in execution messages from the members.
If the messages cannot be received during a prede-
fined time period, the existence of a problem is as-
sumed and the coalition execution is ended.
2.4 Dynamic Task Allocation
Each robot updates its world knowledge according to
the incoming messages. Before selection of an ac-
tion, each robot should perform some routine tasks
for different roles. Auctioneers perform the negotia-
tion processes. Leaders and members of the coalitions
carry out synchronization actions that ensure the si-
multaneous execution of tasks synchronously. Next,
considering the updated world knowledge and the sit-
uations of the processes for different roles, each robot
determines a rough schedule where tasks for which it
meets the capability requirements are considered and
several constraints are taken into consideration. Then,
it generates a prioritized list of tasks, from which it
selects the most suitable and precedence feasible one
and takes an action accordingly. This approach is
known as List Scheduling (Graham, 1966) and shown
to be 2−(1/m) OP T for makespan minimization ob-
jective on tasks with precedence constraints (m is the
number of machines/robots). Different priority rules
may be used. Here in this work, we use Least Flexible
Job First (LFJ) rule in a precendence feasible manner.
The selected action may be participation to a coali-
tion or becoming an auctioneer auctioning for a free
task. The dynamic action selection algorithm (Al-
gorithm 1) is performed if the robot is free or re-
leased. The releasing mechanism provides a way to
switch tasks effectively if another advantageous situa-
tion arises. Decision on releasing a robot from a coali-
tion can only be made by the coalition leader. This
restriction prevents the system from frequent switch-
ing and contributes to the achievement of tasks which
require simultaneous execution.
2.5 Cost/Bid Evaluation
The main objective to achieve a global goal (e.g. min-
imization of total energy consumed or goal achieve-
ment time) determines how robots should perform
cost evaluation. Unless effective bid evaluation strate-
gies are designed, it is not possible to observe globally
optimal solutions for NP-Hard problems, and addi-
tional adjustments are required to change allocations
ICINCO 2006 - ROBOTICS AND AUTOMATION
198

Algorithm 1 Action Selection Algorithm for r
j
.
for each known task T
i
do
if the reqcap
i
⊆ cap
j
∧ h − dep
i
are completed then
if the task is in one following states: under execution and cost
profitable to join k awarded k free then
add the task in a priority queue ordered by LFJ
end if
end if
end for
T
s
= queue.top()
if r
j
is in a coalition of T
k
(should be released) then
cancel executing the task, send a “leaving” message to the CL
k
end if
if state(T
s
) == free then
begin auction negotiation process
else
the current task = T
s
if T
s
is an awarded task then
send “accept” message to the auctioneer
end if
end if
with an additional cost of communication as in com-
binatorial auctions. Difficulty of the problem arises
when communication is limited and robots should au-
tonomously perform task allocation at the same time
with execution. Simultaneous execution requirements
make the problem more challenging because each ro-
bot should be in its most suitable coalition in a future
formation and estimate it correctly before making a
decision in a distributed fashion and with as mini-
mum communication as possible. In our earlier work
(Sariel and Balch, 2006), we have shown that by ef-
fective bid evaluation approaches, globally near op-
timal solutions can be observed in an auction based
system. The incremental assignment approach and
dynamic task selection scheme eliminate redundant
considerations for environments in which the best so-
lution is highly probable to change, and effective bid-
ding strategies ensure the high solution quality with a
time-extended view of the problem.
2.6 Coalition Maintenance Scheme
To ensure maintaining optimality against environ-
mental changes, we propose a dynamic reconfigura-
tion approach. Coalition members can leave a coali-
tion when there is sufficient number of members to
execute the task. The coalition leader is responsible
to broadcast the maximum cost of execution for the
task by one of the coalition members in each execu-
tion step. In the decision stage, each robot receiving
these messages evaluates the maximum cost value of
each coalition. If a robot detects that its cost is lower
than the maximum cost of the coalition and it is re-
leased from its current coalition, it sends a join re-
quest message to the coalition leader. The leader, get-
1
2
3
4
auction
5
auction
auction
bid
auction
bid
bid
1
2
3
4
max cost1
5
max cost1
max cost1
max cost 1
Join request & bid
1
2
3
4
max cost 2
5
max cost 2
released
max cost 2
Robot with the maximum cost value
(max cost1) in the coalition
a b
c
Figure 1: Dynamic Coalition Reconfiguration.
ting a join request message, directly adds the robot to
the coalition. If the coalition leader detects that the
size of the coalition is larger than required, it can re-
lease coalition members with the maximum cost value
for the current task. Getting a released message, a ro-
bot can proceed to select another suitable task. When
the coalition leader considers the size of the current
coalition, it also checks the failures. Since each robot
in the coalition broadcasts ”under execution” and up-
dated ”cost” messages, their failure can be detected
by the coalition leader. The failed robots are also
released from the coalition. If the number of mem-
bers to execute the task is below the required for a pe-
riod of time, the coalition leader cancels the coalition.
An illustrative example of coalition reconfiguration is
given in Fig. 1. Such a situation may occur if a robot
is not reachable when the auction announcement is
made {a}. When the situation changes {b}, the robot
may take over the role of the member with the max-
imum cost value in this coalition {c}. The released
member can select another task to execute.
3 EXPERIMENTAL RESULTS
We have conducted experiments to test the perfor-
mance of the framework in terms of the total time
to complete the overall mission for collective con-
struction domain. In the first stage of the experi-
ments, the performance is evaluated against message
losses for a complex mission that consists of tasks
with hard and soft dependencies among each other.
In the second stage of the experiments, the effective-
ness of the framework and the recovery solutions is
analyzed when the robot failures are injected into the
system. The experiments are conducted on an ab-
stract simulator simulating robots’ updated locations,
the message exchange and execution of the missions.
The results are from 100 independent runs with ran-
dom seeds. The maximum simulation step number is
ROBUST MULTI-ROBOT COOPERATION THROUGH DYNAMIC TASK ALLOCATION AND PRECAUTION
ROUTINES
199
B
B
A
C
B
B
B
A
C
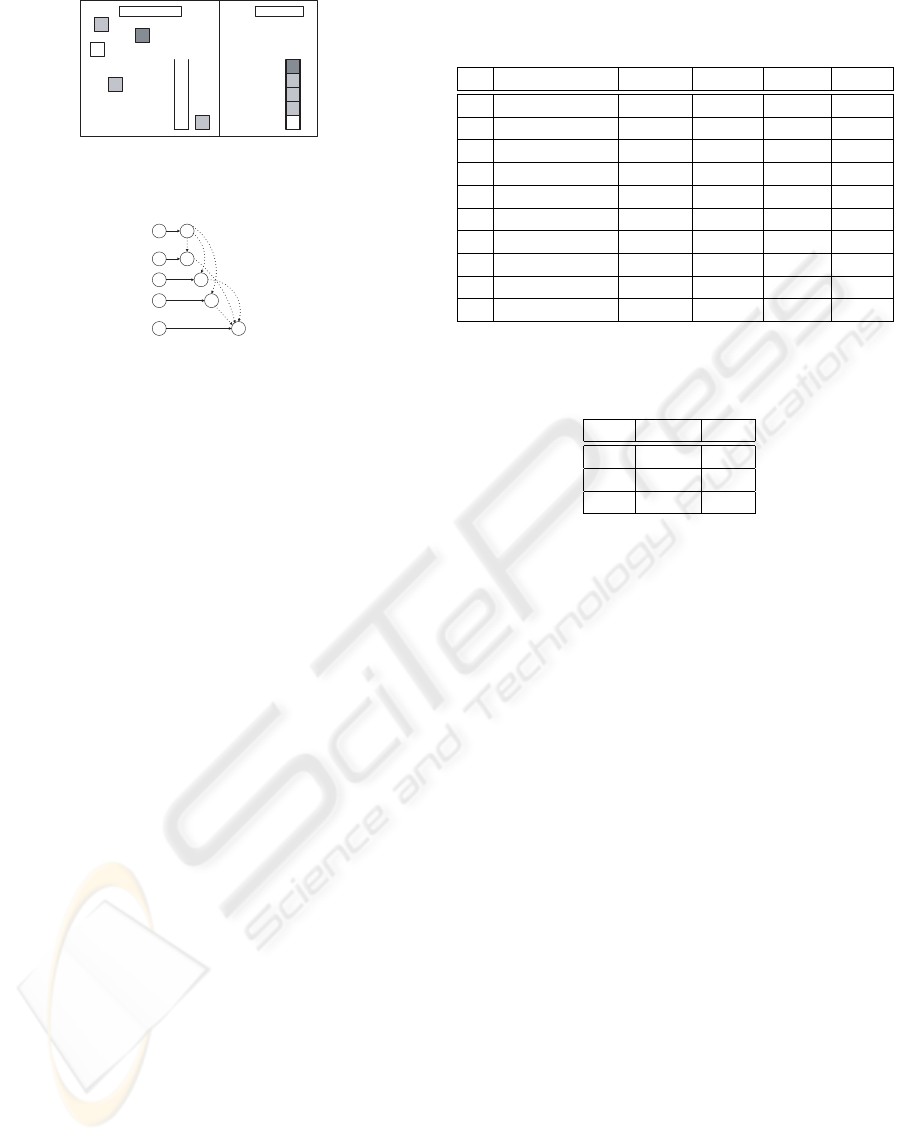
B
INITIAL STATE FINAL STATE
Figure 2: Initial and Final States of the Test Domain.
0
1
2
3
4
5
6
7
8
9
Figure 3: Task dependency graph of the mission.
selected as 200. In the designed experiment, there are
three types of objects: A, B and C. The mission con-
tains tasks for locating these objects and building up
the construction while obeying the specified ordering
restrictions. In the construction, the objects should be
moved into the destination in the predetermined or-
der: A, B and C. The initial and final stages can be
seen in Fig. 2. The requirements for the tasks and
their precedence constraints are given in Table 1. The
third and fourth columns represent the hard and soft
dependencies respectively. The required capabilities
for the task and the required number of robots to ex-
ecute are specified in the last two columns. The ca-
pabilities of having blob finder, sonar sensor, prods
for objects A and C and prods for object B are listed
as 0, 1, 2 and 3 respectively. Based on the specifi-
cations of the overall mission, the task dependencies
can be represented graphically as in Fig. 3, in which
the solid and dashed lines represent the hard and soft
dependencies, respectively.
The capabilities of the robots are given in Table 2.
There is one redundant robot in each set to analyze ro-
bustness of the framework against failures. It should
be noted that, if the requirements are not met, there is
no way to execute the corresponding task.
Instead of selecting the failure step randomly,
we’ve selected the step number in which the failure
occurs as the most important time step to complete
the mission, to fairly analyze the robustness. Based
on the results of no failure case, we’ve observed that,
for most of the runs, the 25th time step is a critical
time step when the robots have already finished exe-
cuting tasks that do not require coordination, and try
to coordinate for other tasks. The failed robot is se-
lected randomly. The mission completion ratios over
all runs are illustrated in Table 3. In this table, the
main columns present results of experiments with no
Table 1: Task Specifications.
ID Description h − dep s − dep reqcap reqno
0 Locate-Obj-A - - 0, 1 1
1 Locate-Obj-B - - 0, 1 1
2 Locate-Obj-B - - 0, 1 1
3 Locate-Obj-B - - 0, 1 1
4 Locate-Obj-C - - 0, 1 1
5 Move-Obj-A-to-Dest 0 - 0, 1, 2 1
6 Move-Obj-B-to-Dest 1 5 0, 1, 3 2
7 Move-Obj-B-to-Dest 2 5 0, 1, 3 2
8 Move-Obj-B-to-Dest 3 5 0, 1, 3 2
9 Move-Obj-C-to-Dest 4 6, 7, 8 0, 1, 2 3
Table 2: Robot Set.
SetID RobotID cap
1 0, 8 0, 1
2 1, 2, 3, 4 0, 1, 2
3 5, 6, 7 0, 1, 3
failure, 1 and 2 robots failures, respectively. An addi-
tional column is added for each experiment with fail-
ures to report the number of runs in which one or two
of randomly failed robot is a coalition leader. One can
infer from these results that the completion of the mis-
sion is not guaranteed when the message loss rate is
over 50%. Since synchronization is highly required
for multi-robot coordination of tasks 6-9, message
losses cause synchronization to be lost and also the
auction negotiation steps are not completed reliably.
However it should be noted that the framework can
easily handle message loss rates smaller than 50% (a
very high message loss rate for real life experiments).
In those cases, in spite of robot failures, even if the
failed robots are coalition leaders, the mission is com-
pleted successfully as if there were no robot failures.
In the 2 failures case, the mission is not completed
in some runs, because the randomly selected robots
belong to the same set and when they fail, mission
completion is not possible. For the message loss rate
100%, the number of runs in which the failed robot
is a coalition leader is 100. This is because, in this
case, each robot is the coalition leader of its own task
with reqno = 1, and since the robots cannot com-
municate, the execution of the tasks with reqno = 1
(0-4) are completed in later steps and all robots try
to execute all these tasks by themselves. The mis-
sion completion time results can be seen in Fig. 4.
The mission completion time increases for increasing
message loss rates logarithmically. However, even
when message loss rate is 70%, the mission can be
ICINCO 2006 - ROBOTICS AND AUTOMATION
200
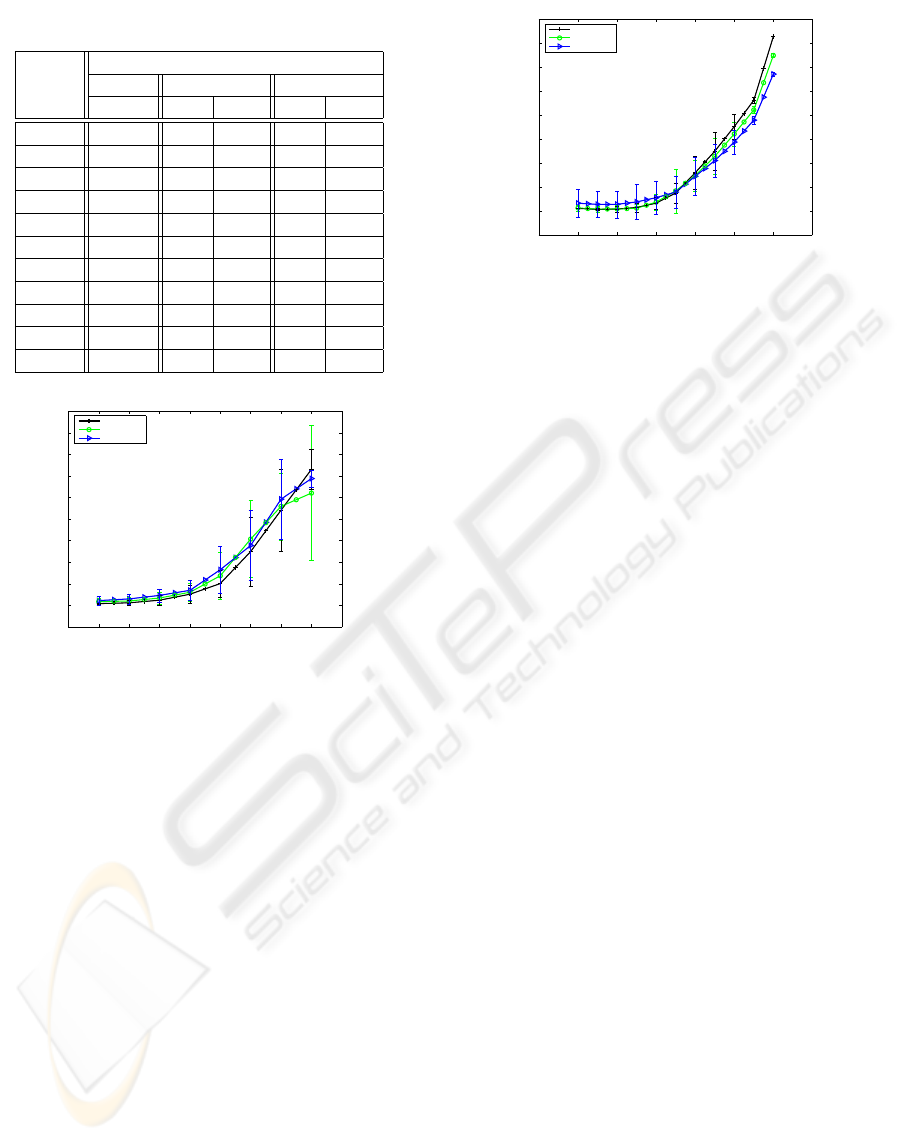
Table 3: Mission Completion Ratios.
Message #of runs in which the mission is completed
Loss no failure 1 robot failure 2 robots failure
Rate (% ) #runs #runs #CL
i
#runs #CL
i
0 100 100 22 83 39
10 100 100 22 79 45
20 100 100 27 81 33
30 100 100 27 78 42
40 100 100 20 77 31
50 98 95 19 72 27
60 59 48 15 30 27
70 4 3 13 2 18
80 0 0 5 0 19
90 0 0 4 0 25
100 0 0 100 0 100
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
20
40
60
80
100
120
140
160
180
200
220
Message loss rate
#Steps to complete the mission
No Failure
1 robot failure
2 robot failure
Figure 4: Mission Completion Time for different message
loss rates, averaged over 100 runs.
completed in some runs. As expected, no failure case
has a better success rate. However, even if there are
failures, results are still very close to the no failure
case. Therefore, we conclude that the framework can
easily handle robot failures.
The total number of messages also increases log-
arithmically for the changing message loss rates as
illustrated in Fig. 5. The robots continuously query
the free tasks and try to coordinate the simultaneous
task execution. The number of messages for no fail-
ure case is also greater when the message loss rate
increases, due to the number of robots and their ef-
forts to coordinate. When the results are evaluated, it
can be concluded that the framework handles message
losses as well as possible.
4 CONCLUSION
We evaluate our multi-robot cooperation framework
on complex missions with inter-related tasks requir-
ing heterogeneity and coordination. The recovery so-
lutions provided by precaution routines for different
−0.2 0 0.2 0.4 0.6 0.8 1 1.2
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
x 10
4
Message loss rate
Number of Messages
No Failure
1 robot failure
2 robot failure
Figure 5: Total Number of System Messages for different
message loss rates, averaged over 100 runs.
kinds of failures ensure the completeness of the ap-
proach. Experiments to validate the robustness of the
approach are conducted in the simulated object con-
struction domain with message losses and robot fail-
ures. Even for very high message loss rates, the ro-
bot team can still complete the mission using the pro-
posed framework. Our next step in this research is
the real field experiments on real robots and extensive
cost/bid designs and analyses for different domains.
REFERENCES
Balch, T. and Arkin, R. C. (1994). Communication in reac-
tive multiagent systems. Autonomous Robots, 1(1):1–
25.
Decker, K. (1996). Foundations of Distributed Artificial
Intelligence, chapter TAEMS: A Framework for En-
vironment Centered Analysis and Design of Coordi-
nation Mechanisms, pages 429–448. John Wiley and
Sons.
Dias, M. B., Zlot, R. M., Kalra, N., and Stentz, A.
(2005). Market-based multirobot coordination: A sur-
vey and analysis. Technical Report CMU-RI-TR-05-
13, Carnegie Mellon University, Robotics Institute.
Gerkey, B. and Mataric, M. J. (2004). A formal analysis
and taxonomy of task allocation. Intl. J. of Robotics
Research, 23(9):939–954.
Graham, R. L. (1966). Bounds for certain multiprocessing
anomalies. Bell System Technical Journal, 45:1563–
1581.
Horling, B. and Lesser, V. (2005). A survey of multi-agent
organizational paradigms. The Knowledge Engineer-
ing Review, 19(4):281–316.
Sariel, S. and Balch, T. (2006). Efficient bids on task allo-
cation for multi-robot exploration. In The 19th Inter-
national FLAIRS Conference.
Smith, R. G. (1980). The contract net protocol: High
level communication and control in a distributed prob-
lem solver. IEEE Transaction on Computers C-,
29(12):1104–1113.
ROBUST MULTI-ROBOT COOPERATION THROUGH DYNAMIC TASK ALLOCATION AND PRECAUTION
ROUTINES
201
