
SEMG for Identifying Hand Gestures using ICA
Ganesh R. Naik
1
, Dinesh K. Kumar
1
, Vijay Pal Singh
1
and M. Palaniswami
2
1
School of Electrical and Computer Engineering, RMIT University,
GPO Box 2476V. Melbourne, Victoria-3001, Australia.
2
Department of Electrical and Electronic Engineering, The University of Melbourne,
Parkville, Victoria-3010, Australia.
Abstract. There is an urgent need for establishing a simple yet robust system that
can be used to identify hand actions and gestures for machine and computer con-
trol. Researchers have reported the use of multi-channel electromyogram (EMG)
to determine the hand actions and gestures. The limitation of the earlier works is
that the systems are suitable for gross actions, and when there is one prime-mover
muscle involved. This paper reports overcoming the difficulty by using indepen-
dent component analysis to separate muscle activity from different muscles and
classified using backpropogation neural networks. The system is tested and found
to be effective in classifying EMG.
1 Introduction
Identification of hand gesture has numerous applications, primarily related to control-
ling machines and computers. Some of the commonly employed modalities include
vision based systems [1,2], mechanical sensors [3], and the use of electromyogram, an
indicator of muscle activity [4,5]. Electromyogram has an advantage of being easy to
record, and is non-invasive. Electromyography (SEMG) is a result of the spatial and
temporal integration of the motor unit action potential (MUAP) originating from differ-
ent motor units. It can be recorded non-invasively and used for dynamic measurement
of muscular function. It is typically the only in vivo functional examination of muscle
activity used in the clinical environment. The analysis of EMG can be broadly cate-
gorised into two; (i) gross and global parameters and (ii) decomposition of EMG into
MUAP. Hand movement is a result of complex combination of multiple muscles. While
Dinesh et al. [6] have reported success in the use of multiple channels SEMG record-
ing for the purpose, the precise location of the electrodes and multi-channel recordings
make the system complex. A single channel system where the location of electrodes is
not critical to the results is highly desirable. But the difficulty in the use of single chan-
nel when there is a complex group of muscles that control the movement is the very
large variation in the magnitude and frequency content of the signal when the distance
between the recording electrodes and the muscle fibres is changed. To determine the
hand action based on the muscle activity, it is important to identify the muscle activity
of the different muscles responsible for the action. When attempting to identify small
level of muscle activity such as required for hand gestures, and with simultaneous acti-
vation of number of closely spaced muscles, there is considerable cross talk. Similarity
R. Naik G., K. Kumar D., Pal Singh V. and Palaniswami M. (2006).
SEMG for Identifying Hand Gestures using ICA.
In Proceedings of the 2nd International Workshop on Biosignal Processing and Classification, pages 61-67
DOI: 10.5220/0001223500610067
Copyright
c
SciTePress

in the spectrum and other properties of the activity from the different muscles makes
the separation of these difficult. There is a need to separate the muscle activity origi-
nating from different muscles. With little or no prior information of the muscle activity
from the different muscles, this is a blind source separation (BSS) task. Blind separation
of independent sources is an important research area. Independent component analysis
(ICA) is an iterative BSS technique which has been found to be very successful and
has found applications in audio and biosignal applications. ICA has been proposed for
unsupervised cross talk removal from SEMG recordings of the muscles of the hand [7].
Research that isolates MUAP originating from different muscles and motor units has
been reported in 2004 [8]. A denoising method using ICA and high pass filter banks has
been used to suppress the interference of electrocardiogram (ECG) in EMG recorded
from trunk muscles [9]. Muscle activity originating from different muscles can be con-
sidered to be independent, and this gives an argument to the use of ICA for separation
of muscle activity originating from the different muscles. This paper proposes the use of
ICA for separation of muscle activity from the different muscles in the forearm to iden-
tify the hand action. ICA is an iterative technique where the only model of the signals
is the independence, and the distribution. The natural outcome of this is that the signals
are separated without there being any information of the order of the sources. While
this difficulty is generally not consequential for audio signals, this would be of concern
when working with muscle activity. The spatial location of the active muscle activity
is the determining factor of the hand action and gesture. To overcome this difficulty,
one approach that has been reported is the use of prior knowledge of the anatomy. The
advantage of this approach is the model based approach that provides a well defined
muscle activity pattern. The difficulty with that approach is the need for well defined
location of the electrodes.
2 Basic Principles of Independent Component Analysis (ICA)
ICA separates signals from different sources into distinct components. The fundamen-
tals of ICA rest on information theory. The technique is based unsupervised learning
rules where reduction of mutual information and increase in Gaussianity can be consid-
ered to be the cost function. Given a set of multidimensional observations, which are
a result of linear mixing of unknown independent sources through an unknown mixing
source, ICA can be employed to separate the signals from the different sources. The
independent sources may be sources for audio signals such as speech, voice, music, or
signals such as bioelectric signals. If the mixing process is assumed to be linear, it can
be expressed as
x = As (1)
where x = (x
1
, x
2
, ..., x
n
) is the recordings, s = (s
1
, s
2
, ..., s
n
) the original signals and
A is the n x n mixing matrix of real numbers. This mixing matrix and each of the
original signals are unknown. To separate the recordings to the original signals, an ICA
algorithm performs a search of the de mixing matrix W by which observations can be
linearly translated to form Independent output components so that
s = Wx (2)
62

For this purpose, ICA relies strongly on the statistical independence of the sources s.
This technique iteratively estimates the un-mixing matrix using the maximisation of
independence of the sources as the cost function [10].
2.1 ICA for SEMG Applications
Signals from different sources can get mixed during recording. Often it is required to
separate the original signals, and there is little information available of the original sig-
nals. An example is the cocktail party problem. Even if there is no (limited) information
available of the original signals or the mixing matrix, it is possible to separate the origi-
nal signals using independent component analysis (ICA) under certain conditions. ICA
is an iterative technique that estimates the statistically independent source signals from
a given set of their linear combinations. The process involves determining the mixing
matrix. The independent sources could be audio signals such as speech, voice, music,
or signals such as bioelectric signals.
A number of researchers have reported the use of ICA for separating the desired
SEMG from the artefacts and from SEMG from other muscles. While details differ,
the basic technique is that different channels of SEMG recordings are the input of ICA
algorithm.
The fundamental principle of ICA is to determine the un-mixing matrix and use that
to separate the mixture into the independent components. The independent components
are computed from the linear combination of the recorded data. The success of ICA to
separate the independent components from the mixture depends on the properties of the
recordings.
2.2 Statistical Properties of SEMG Recordings
Signals from Gaussian sources cannot be separated from their mixtures using ICA
[10], making such signals unsuitable for ICA applications. Mathematical manipulation
demonstrates that all matrices will transform this kind of mixtures to another Gaussian
data. However, a small deviation of density function from Gaussian may make it suit-
able as it will provide some possible maximization points on the ICA optimization
landscape, making Gaussianity based cost function suitable for iteration. If one of the
sources has density far from Gaussian, ICA will easily detect this source because it will
have a higher measure of non Gaussianity and the maxima point on the optimization
landscape will be higher. If more than one of the independent sources has non Gaussian
distribution, those with higher magnitude will have the highest maxima point in the op-
timization landscape. Given a few signals with distinctive density and significant mag-
nitude difference, the densities of their linear combinations will tend to follow the ones
with higher amplitude. Since ICA uses density estimation of a signal, the Components
with dominant density will be found easier. Signals such as SEMG have probability
densities that are close to Gaussian while artefacts such as ECG and motion artefacts
have non Gaussian distributions. From the above, it can be suggested that ICA may suit-
ably isolate some of the above signals, while its efficacy for separating the others maybe
63
questionable. It is difficult to identify the quality of separation of EMG from one mus-
cle and the neighbouring muscles, or that of EEG from one channel to the neighbouring
recording sites, making it difficult to confirm or negate the above.
3 Methodology
3.1 Experimental Procedure
Ethics approval by the RMIT university committee of ethics of experiment on human
subject was granted to conduct the experiment. One healthy male subject was recruited
for the experiment. A written consent was signed by the subject for the above exper-
iment. A proprietary SEMG acquisition system by Delsys (USA) was used for data
collection. Four differential electrodes with inter-electrode distance of 10mm and gain
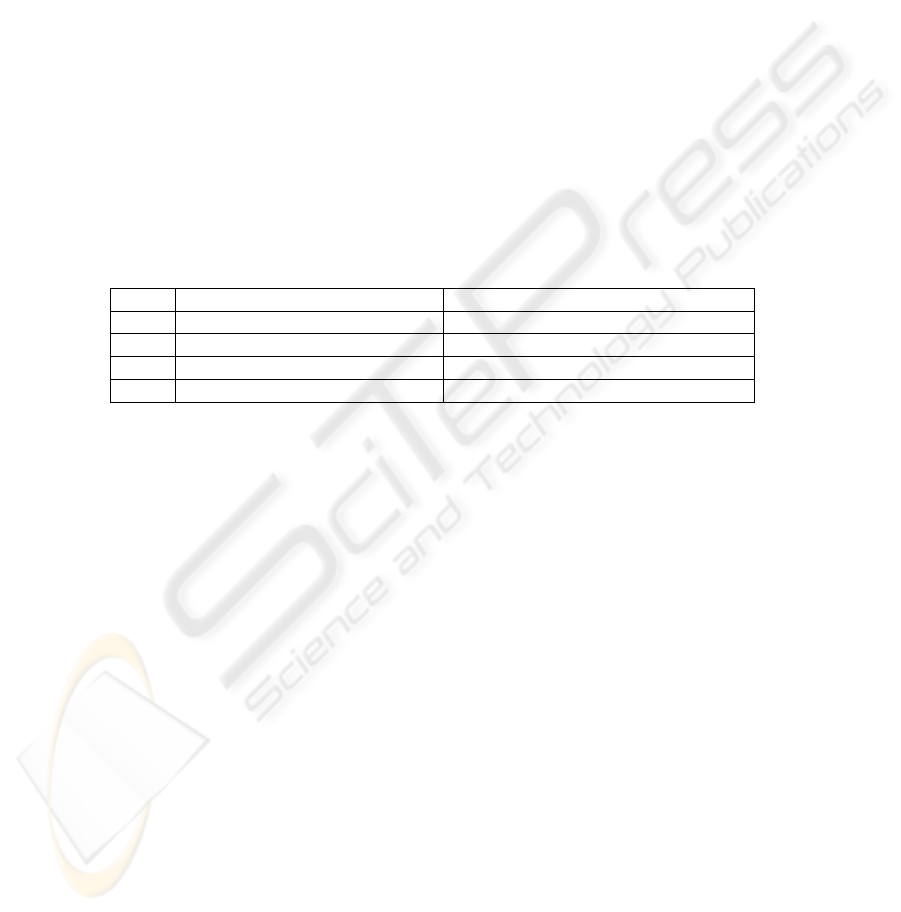
of 1000 were placed on the four muscles of the subject’s forearm as outlined in the table
(1) as shown below.
Table 1. Placement of the Elctrodes over the skin of the forearm.
Channel Muscle Function
1 Brachioradialis Flexion of forearm
2 Flexor Carpi Ulnaris (FCU) Adduction and flexion of wrist
3 Flexor Carpi radialis (FCR) Abduction and flexion of wrist
4 Flexor digitorum superficialis (FDS) Finger flexion while avoiding wrist flexion
Subjects were asked to keep the forearm resting on the table with elbow at an angle
of 90 degree in a comfortable position. Three hand actions were performed and repeated
15 times. There was no external load. The actions are listed below.
(1) Wrist flexion (without flexing the fingers).
(2) Finger flexion (ring finger and the middle finger together without
any wrist flexion).
(3) Finger and wrist flexion together but normal along centre line.
While Brachioradialis is an elbow flexor, a very little activity may be recorded in
this muscle while finger and/or wrist flexion. FCU and FCR the two wrist flexors that
are responsible for adduction and abduction of the wrist respectively and they perform
the flexion in the normal direction along the centre line together. FDS performs the
flexion of the middle finger and the ring finger.
The hand actions and gestures represented low level of muscle activity. The hand
actions were selected based on small variations between the muscle activities of the
different digitas muscles situated in the forearm. The recordings were separated using
ICA to separate activity originating from different muscles and used to classify against
the hand actions.
64
3.2 Analysis
The aim of this experiment was to test the use of ICA for separation of the EMG signals
for the purpose of identifying hand gestures and actions. For the first set of experiments
recorded signals x were analysed using matlab software package. There were approx-
imately 30000 samples of the data which was the result of 15 times wrist movements.
Since there were four Chanel (x) electrodes it formed 4 x 4 mixing matrix. For each set
of experiments the EMG data from 15 repetitions were analysed using fast ICA matlab
package. The mixing matrix A was computed for the first set of data. The computed
mixing matrix had been kept constant (Same mixing matrix had been used through out
the one main experiment) for the remaining set of experiments and in each case the
sources had been computed using the following formula
x = As (3)
Where x is the recorded data, A mixing matrix and s is the sources. The sources are
recovered using the following formula
s = Bx (4)
Where B is the inverse of mixing matrix A. This process was repeated for each of
the three experiments.Each experiment resulted in four sources. Root Mean Squares of
each experiment were computed using the following formula
s
RMS
=
s
1
N
N
∑
i=1
s
2
i
(5)
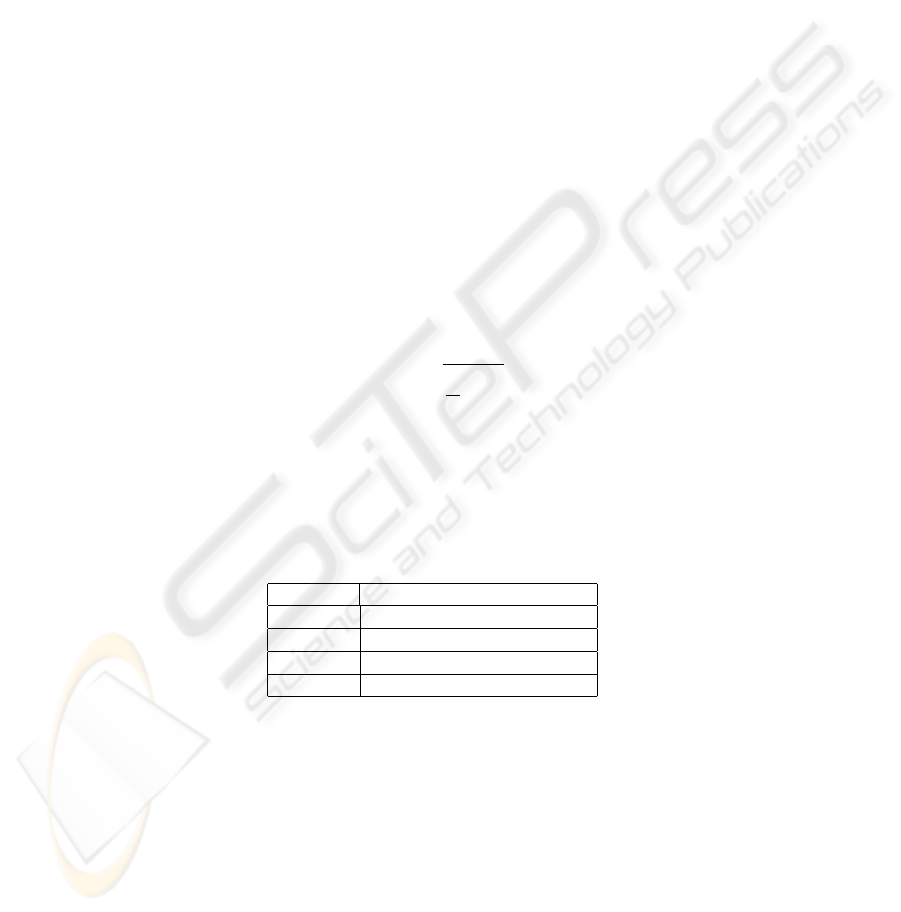
Where s is the source and N is the number of samples.The examples of one set of
results and RMS values were shown in the table (2) below.
Table 2. Example of one set of sub experiment results showing the RMS (Root Mean Square)
values.
Source RMS (Root Mean Square) value
Source1(s1) 0.0461
Source2(s2) 0.0366
Source3(s3) 0.0311
Source4(s4) 0.0209
The above set of process had been repeated for the three actions. The outcome of
this was a set of 12 set of examples, each example pertaining to three actions. These
12 sets of examples were used to train a backpropogation neural network with 3 inputs
and 4 outputs. After training, the network conditions were saved and used to test the
network data from experiments not used to train the network. The ability of the network
to correctly classify the inputs against known hand actions were used to determine the
efficacy of the technique.
65
4 Results and Observations
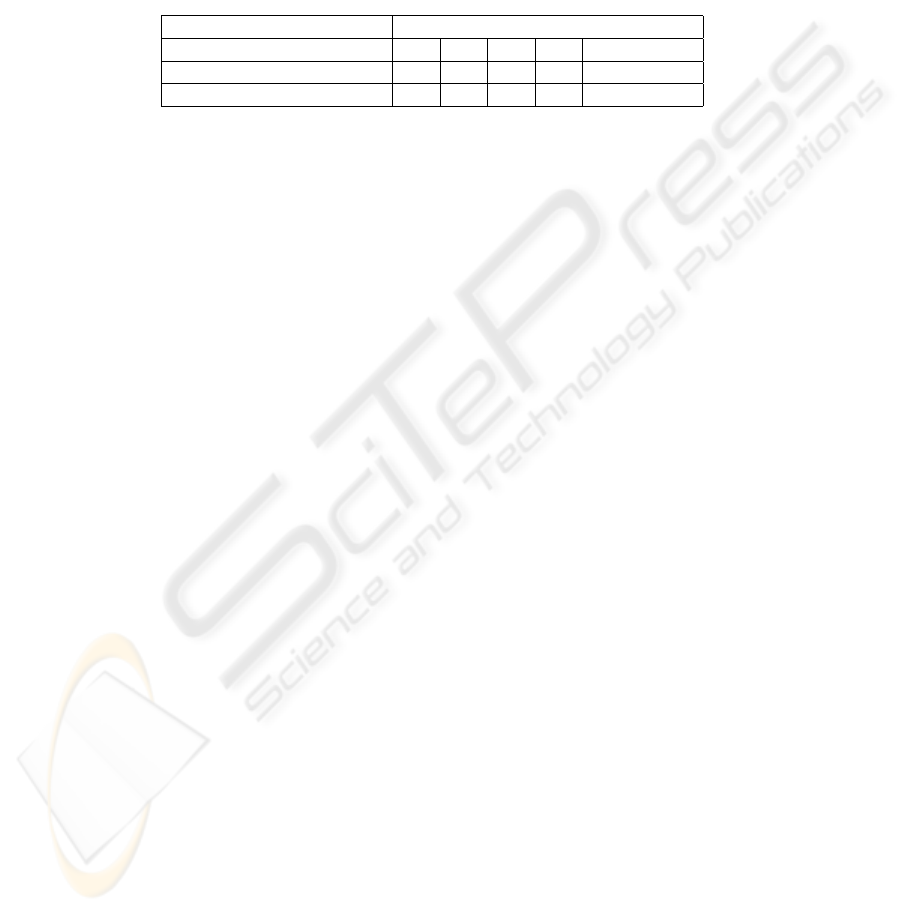
A result of testing the network using five set of experiments are tabulated below. The
classification accuracy was 100% for all the experiments. The results are outlined in
table (3).
Table 3. Neural network testing results.
Action Performed Action identified for each sub experiments
Wrist flexion 100% 100% 100% 100% 100%
Finger Flexion 100% 100% 100% 100% 100%
Finger flexion and wrist flexion 100% 100% 100% 100% 100%
5 Discussions and Conclusion
A new approach that combines semi-blind ICA along with neural networks was used
to separate and identify hand gestures. The results demonstrate that the technique can
be effectively used to identify hand gestures based on surface EMG when the level of
activity is very small. The authors would like to mention that this is early stage of the
work, and work needs to be done to identify inter-day variations. It is also important to
test the technique for different actions, and for a large group of people. Further, there is
need to automate the semi-blind operation.
References
1. Schlenzig, J., Hunter, E., Jain, R. : Vision based hand gesture interpretation using recursive
estimation, Vol. 2. Twenty-Eighth Asilomar Conference on Signals, Systems and Computers,
(1994) 1267 - 1271
2. Rehg, J. M., Kanade, T. : Vision-based hand tracking for human-computer interaction, IEEE
Workshop on Motion of Non-Rigid and Articulated Objects, (1994) 16 - 22
3. Pavlovic, V. I., Sharma, R., Huang, T. S. : Visual interpretation of hand gestures for human-
computer interaction, Vol. 19. IEEE Transactions on Pattern Analysis and Machine Intelli-
gence, (1997) 677 - 695
4. Cheron, G., Draye, J., Bourgeios, M., Libert, G. : A Dynamic Neural Network Identification
of Electromyography and Arm Trajectory Relationship During Complex Movements, Vol.
43. IEEE Trans. Biomed. Eng, (1996) 552 - 558
5. Koike, Y., Kawato, M. : Human Interface Using Surface Electromyography Signals, Vol. 79.
Electronics and Communications, Japan, (1996) 15 - 22
6. Djuwari, D., Kumar, D. K., Polus, B., Raghupathy, S. : Multi-step independent component
analysis for removing cardiac artefacts from back semg signals, 8th Australian and New
Zealand Intelligent Information Systems Conference, Australia, (2003)
7. Greco, A., Costantino, D., Morabito, F. C., Versaci, M. A. : A Morlet wavelet classification
technique for ICA filtered SEMG experimental data, Vol. 1. Neural Networks Proceedings
of the International Joint Conference, (2003) 66 - 71
66

8. Hideo, Nakamura., Masaki, Yoshida., Manabu, Kotani., Kenzo, Akazawa., Toshio, Mori-
tani. : The application of independent component analysis to the multi-channel surface elec-
tromyographic signals for separation of motor unit action potential trains, Vol. 14. Journal of
Electromyography and Kinesiology, (2004) 423 - 432
9. Yong, Hu., Li, X. H., Xie, X. B., Pang, L. Y., Yuzhen, Cao., Luk, K. D. K. : Applying Inde-
pendent Component Analysis on ECG Cancellation Technique for the Surface Recording of
Trunk Electromyography, IEEE Engineering in Medicine and Biology 27th Annual Confer-
ence, Shanghai (2005)
10. Hyvarinen, A.,Karhunen, J., Oja, E. :Independent Component Analysis, John Wiley, New
York (2001)
67
