
A SYSTEMATIC APPROACH TO MULTIPLE DATASETS
VISUALIZATION OF SCALAR VOLUME DATA
Gaurav Khanduja and Bijaya B. Karki
Department of Computer Science, Louisiana State University, Baton Rouge, Louisiana, USA
Keywords: Multiple datasets visualization, Visualization application, Scalar data visualization, Isosurface, 3D textures,
Clipping.
Abstract: Many applications require simultaneous display of m
ultiple datasets, representing multiple samples, or
multiple conditions, or multiple simulation times, in the same visualization. Such multiple dataset
visualization (MDV) has to handle and render massive amounts of data concurrently. We analyze the
performance of two widely used techniques, namely, isosurface extraction and texture-based rendering for
visualization of multiple sets of the scalar volume data. Preliminary tests performed using up to 25 sets of
moderate-size (256
3
) data show that the calculated times for the generation and rendering of polygons
representing isosurface, and for the mapping of a series of textured slices increase non-uniformly with
increasing the number of individual datasets. Both techniques are found to no longer be interactive with the
frame-rates dropping below one for six or more datasets. To improve the MDV frame-rate, we propose a
scheme based on the combination of hardware-assisted texture mapping and general clipping. In essence, it
exploits the 3D surface texture mapping by rendering only the externally visible surfaces of all volume
datasets at a given instant, with dynamic clipping enabled to explore the interior of the data. The calculated
frame-rates remain above one and are substantially higher than those with the other two techniques.
1 INTRODUCTION
Visualization of three-dimensional scalar data has
been studied extensively over last two decades.
Tremendous challenge is often imposed by the size
of the volume data: Either the dataset is too massive
to exhaustively visualize or there are multiple
datasets to be visualized simultaneously. In this
paper, we have focused on the latter case, that is,
multiple datasets visualization (MDV) by which we
mean that more than one datasets of a given type are
concurrently rendered in the same visualization.
Although multiple datasets have previously been
visualized/analyzed in many occasions (Schulze and
Forberg, 2004; Crutcher et al., 1996; Abrams and
Shaffer, 1996), there exists a little work, if not at all,
towards addressing MDV in a systematic way.
We believe that there is no need to over
em
phasize on the importance of MDV. It is not
always possible to make an inference based on
single dataset so one needs to compare several
datasets in some effective way. So visualization
should be able to handle, multiple datasets at the
same time, representing multiple cases of interest so
that important relationships and differences among
these cases can be better understood.
Examples of multiple datasets, which require
sim
ultaneous visual analysis, are abundant. Here,
we consider 3D charge density distributions in real
material systems, which are investigated on routine
basis by parallel quantum mechanical simulations
(Codes, 2005). The resulting multiple charge density
datasets of interest may represent different samples,
or different temperatures or different pressures or
different simulation times. One might be interested
in comparing the charge distribution for different
(say four) types of vacancy defects in a given
crystal, say, Mg-, Si-, O1- and O2-defects in an
important Earth forming mineral MgSiO
3
perovskite.
Or the interest might be in investigating the effect of
pressure by displaying multiple datasets
corresponding to different pressure conditions (say
Mg-defect at eight different pressures) at the same
time. Or one might need to visualize together ten
different datasets as a function of temperature. Or, if
one is interested to look at outputs taken at different
times of simulation together, the number of datasets
can be arbitrarily large.
59
Khanduja G. and B. Karki B. (2006).
A SYSTEMATIC APPROACH TO MULTIPLE DATASETS VISUALIZATION OF SCALAR VOLUME DATA.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 59-66
DOI: 10.5220/0001353200590066
Copyright
c
SciTePress

Two natural approaches to the multiple dataset
visualization appear to be a) an extension of the
standard visualization methods to handle multiple
datasets and b) a parallel processing (using multiple
CPUs and/or multiple display screens) of
visualization to permit real-time navigation through
multiple datasets. In this paper, we adopt the first
approach because it enables one to perform MDV
with easily available resources such as PC desktops.
A large number of 3D scalar visualization
techniques currently exist, and their performance is
often justified for single dataset visualization (SDV)
(Meibner et al. 2000). Common examples include
the isosurface extraction (Lorenson and Cline,
1987), raycasting (Levoy 1990), splatting
(Westover, 1990), shear-warp (Lacroute and Levoy,
1994) and texture mapping (Cabral et al, 1994).
Some of these approaches are considered here in the
context of the simultaneous visualization of multiple
datasets.
It is natural for one to expect that all standard
volume visualization techniques are equally
applicable to the case of visualization of multiple
datasets. However, this expectation is true to a great
extent but not entirely. MDV involves simultaneous
processing of more than one datasets. This means
that the visualization process should become slower
by a factor of N or higher for N number of datasets
in comparison with single dataset, due mainly to the
increased amount of data. The need for larger
memory space (which may eventually result in a
substantial swapping) and bigger display area
(which involves the processing of more pixels) can
further slow down the process. One other major
issue is that MDV is no longer guaranteed to be
interactive. Our preliminary performance tests show
that the SDV techniques studied here become
increasingly slow as the number of datasets
increases. Even for the data size of 256
3
, the frame-
rate is less than 1 for six or higher sets thereby
indicating the loss of interactivity in MDV.
Interactivity plays a crucial role in any volume
visualization and even more so in MDV because it
gives the user with immediate visual feedback. The
user often needs to repeat visualization process
several times, in part or full, to explore a given
dataset from various prospects. For instance, the user
might need to extract a series of isosurfaces
corresponding to different reference (or threshold)
scalar values. In the case of clipping, one might need
to examine many clipped views at different
locations, orientations and sizes. Even the direct
volume rendering, although no information is
thrown away, posses the difficulty of interpreting the
cloudy representation of the volume data. So the
extraction of a more complete information requires
several of interaction modes like navigation, changes
of transfer functions, region of interest mode,
rotation, scaling, and some more sophisticated
classification modes be supported in a given
visualization.
In this paper, we analyze the performance of two
standard volume visualization techniques, namely,
isosurface extraction and texture-based volume
rendering in the case of multiple datasets. Doing so
requires handling of massive amounts of data, which
introduces several issues related to memory,
resolution and interactivity. Our current focus is to
deal with the interactivity issue (by calculating the
frame-rate), which arises even in the case of multiple
datasets of moderate sizes, e.g., 256
3
. This size of
data is very common for today’s many scientific and
engineering applications. Also, this size can be
handled by the texture mapping support of the
today’s general-purpose graphics hardware. As an
effective solution to improving the interactivity, we
have adopted a MDV scheme based on 3D surface
texture mapping and general clipping. We limit the
maximum number of individual datasets to be
visualized together to 25 in this study.
2 RELATED WORK
Several visualization methods are available for
volumetric scalar datasets. Indirect methods extract
an intermediate geometric representation of the
surfaces from the volume data and render those
surfaces via conventional surface rendering
methods, e.g., isosurfaces (Lorenson and Cline,
1987). On the other hand, direct methods render the
data without generating an intermediate
representation and as such, they are more general
and flexible, e.g., texture-based rendering (Cabral et
al. 1994, Wilson et al. 1994). In addition to
supporting direct volume rendering, texture mapping
has also been used in conjunction with clipping
(Weiskopf et al. 2003). Both the strengths and
weaknesses of all these techniques have been
assessed in a wide variety of single dataset (Meibner
et al. 2000).
To the best of our knowledge, no systematic
analysis and practical evaluation of the current
volume visualization methods have yet been
reported in the case of multiple datasets. We choose
to examine the isosurface- and texture-based
visualization methods for MDV for several reasons:
First, the former is an indirect method whereas the
latter is a direct method. Second, the former is
software-based approach whereas the latter is the
hardware-assisted approach. Third, isosurface is so
widely used whereas texture mapping is faster than
the most volume visualization techniques.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
60
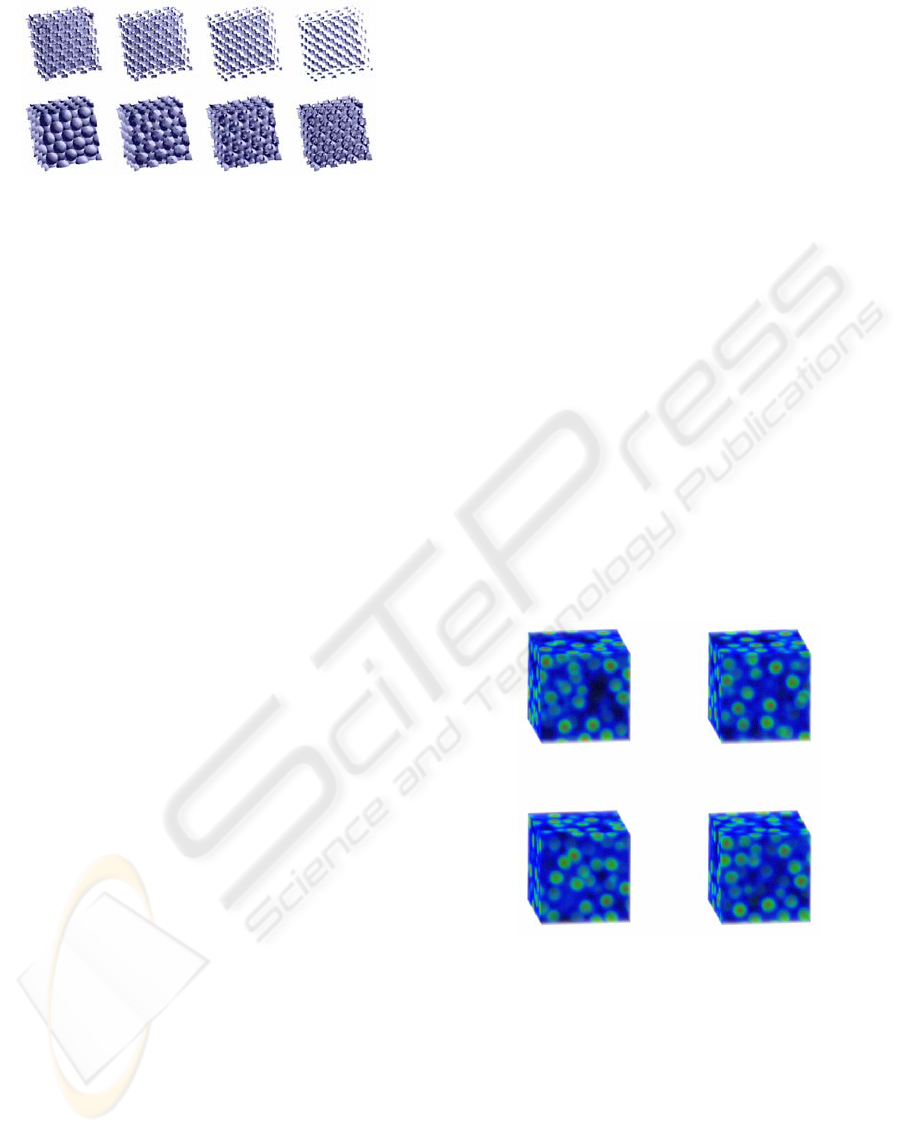
Figure 1: Isosurfaces for eight sets of the electronic charge
density data for MgO at different compressions
(compression increasing from the lower left to the upper
right). The structures represent the charge distribution
around O ion sites.
Due to recent advances of commodity graphics
hardware, texture-based rendering is able to achieve
acceptable frame-rates with high image quality
(Wilson et al. 1994; 2002; Weiler et al.2000; Cullip
and Newman, 2003). Clipping combined with
texture-based rendering can exploit advanced
fragment operations supported by graphics
hardware. For example, Van Gelder and Kim (1996)
have used clip planes. Techniques for volume
clipping with complex geometries, which are based
on the depth structure and voxelization of the clip
geometry and also involve subsequent shading of the
clipped surfaces, have been proposed (Weiskopf et
al. 2002; 2003). In the volume clipping based on
stencil tests, stencil buffer entries are set at only
those positions where the clip plane is covered by an
inside part of the clip geometry (Westermann and
Ertl, 1998). There are also techniques, which have
exploited isosurface clipping (Forguson, 1992) and
interactive clipping combined with dual-resolution
texture-based volume rendering (Khanduja and
Karki, 2005).
3 MDV WITH ISOSURFACE
An isosurface is the 3D surface representing the
locations of a constant scalar value within a volume.
Common approaches for generating isosurfaces
include the Marching Cubes algorithm for
generating isosurface polygons on a voxel-by-voxel
basis (Lorenson and Cline, 1987), the Dividing
Cubes approach of subdividing threshold voxels into
smaller cubes at the resolution of pixels (Cline et al,
1988), and raytracing with an analytic isosurface
intersection computation (Parker et al. 1998). We
use the Marching Cubes algorithm to extract
isosurfaces corresponding to a given threshold value
from multiple sets of data at the same time. The
essence of the algorithm remains the same for MDV:
It examines all voxels of each volume data (one by
one), and determines, from the arrangement of
vertex values above or below a threshold value, if
and how an isosurface would pass through these
elements. The algorithm thus processes one voxel at
a time, and generates its isosurface geometry
immediately before moving to the next voxel. Once
all the voxels of one volume data are processed and
the corresponding isosurface is extracted, the same
algorithm is repeated for each other volume data in a
given multiple set. We have visualized up to twenty-
five sets of 256
3
data using Marching Cubes
algorithm. Figure 1 shows MDV for the eight sets of
the simulated charge density of MgO as a function
of pressure.
4 MDV WITH 3D TEXTURE
RENDERING
The texture mapping approach uses 2D or 3D
textured data slices, combined with an appropriate
blending factor (Cabral et al. 1994; Wilson et al,
1994). In the case of 2D textures, three stacks of
slices, one for each major viewing axis, are stored
and one most parallel to the current viewing
direction is chosen. Hardware does bilinear
interpolation in a 2D texture only and opacity
changes with rotation. As such, image quality is best
Figure 2: Texture-based MDV of four sets of electronic
charge density distributions of MgO. The color and
opacity values for each pixel are based on the density
value associated with that pixel: A multiscale RGB color
mapping is used: B represents values from 0 to 0.05, G is
added to represent values up to 0.4 and then R is increased
and both B and G are decreased for higher values.
only when the slices are parallel to the view plane.
On the other hand, the 3D texture approach can
sample the data in all directions freely so the slices
can always be oriented perpendicular to the viewer's
line of sight. Image quality is independent of the
viewing direction. The intrinsic trilinear hardware
A SYSTEMATIC APPROACH TO MULTIPLE DATASETS VISUALIZATION OF SCALAR VOLUME DATA
61
interpolation allows us to perform supersampling,
i.e., to use an arbitrary number of slices with an
appropriate resampling on the slices. Only one
single 3D texture needs to be loaded thus requiring
one third of the memory, compared to the case of 2D
textures.
We apply the 3D texture-mapping hardware to
support MDV. The first step is to load the volume
data into a 3D texture; it involves simply reading a
set of images or shading data points. All datasets are
loaded one by one to generate multiple 3D textures.
The second step involves choosing the number of
slices perpendicular to the viewing direction for each
texture. The number of slices is often chosen to be
equal to the volume’s dimensions, measured in
texels. For instance, each dataset of 256
3
needs 256
slices. The third step is to use texture coordinate
generation to texture the slice properly with respect
to each 3D texture data. Finally, the textured slices
are rendered from back to front, towards the viewing
position, with appropriate blending performed at
each slice. In this study, OpenGL supported “over”
blending function is used. As the viewpoint and
direction of view change, one needs to recompute
the data slice positions and update the texture
transformation matrix as necessary.
5 INTERACTIVE MDV
APPROACH
We now adopt an approach by exploiting the
texture-mapping hardware and general clipping to
support a fast visualization of multiple sets of
volumetric scalar data. Similar approaches were
previously used to visualize a single dataset with
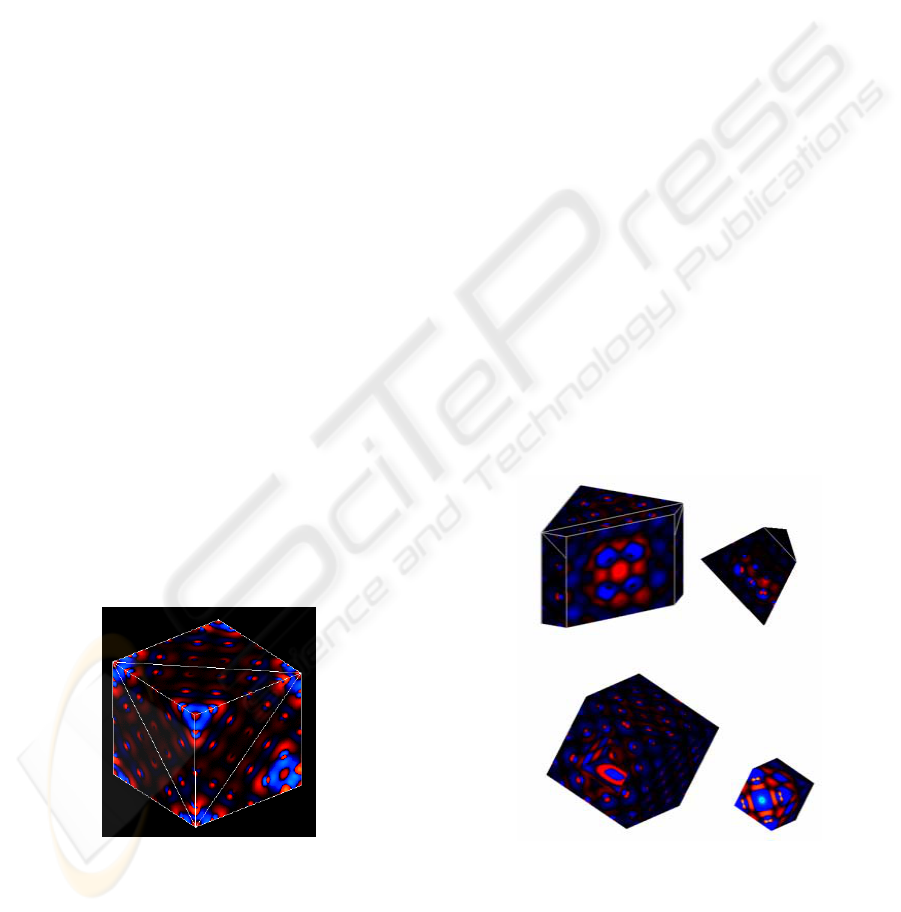
Figure 3: A 256
3
charge density data with the external
surfaces of the volume rendered using texture mapping.
Electrons are depleted from the bluish regions and
deposited in the reddish regions due to a vacancy defect in
MgO crystal.
interactive planar clipping and volume clipping via
per-fragment operations supported by graphics
hardware (van Gelder and Kim, 1996; Weiskopf et
al. 2003, 2003; Khanduja and Karki, 2005). They
involve rendering of all texels of the 3D textures
passing a given clip test, for instance, on average the
half of the total number of 256
3
texels are rendered.
Thus, the texture-based volume rendering with/out
clipping uses a large number of textured slices,
which becomes critical as the number of datasets to
be rendered concurrently increases.
5.1 External 3D Surface Rendering
Our texture-based MDV approach improves
interactivity by reducing the amount of texture
mapping. The basic idea is to restrict the rendering
of data to the external (visible) surfaces of the
volume instead of performing complete or nearly
complete 3D volume texture mapping. One place
where such surface rendering makes sense is the
visualization of the volume data by clipping. In the
case of clipping whether it uses a simple clip plane
or a more complex 3D clip geometry, one is always
interested to view the new surfaces that are exposed
(and hence are visible) to the user. For instance, one
can view scalar data on a cross-section of the
volume with a cutting plane. One defines a regular
grid on the clip plane and calculates data values on
this grid by interpolation of the original data and
Figure 4: Planar (upper two) and box (bottom two)
clipping. In the later case, inner (left) and outer (right)
portions of the volume are removed.
uses an appropriate color-map to make the data
visible. If this is the case and we are using 3D
texture-based rendering, then there is no need to
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
62
have texture mapped on all slices to cover the
complete volume.
Texture mapping is thus performed on only
external surfaces of the volume at a given instant
thereby restricting the rendering of the data only to
those visible surfaces. For instance, the simulated
charge density that considered here is confined to a
cubic volume. The 3D surface rendering of the
original volume can be done by simply extracting
and mapping textures on the six surfaces of the cube
front and back, left and right, and top and bottom
square faces), as shown in Figure 3. In effect, the
problem of 3D volume texture mapping is reduced
to the problem of 3D surface texture mapping, which
renders textured data on only those six surfaces.
Each square surface can be represented by two edge-
sharing triangles so that a total of 12 triangles thus
needed are used to implement the clipping operation,
which is described in the next Section. The 3D
surface rendering approach works only with the 3D
texture because it allows us to extract an arbitrary
textured-slice without requiring re-sampling of the
volume data. The polygon on which we want to map
a texture can intersect the volume at any location
and orientation. Texture mapping only requires the
vertices of this polygon, which are passed as texture
coordinates.
5.2 Clipping
Here we describe how clipping is combined with 3D
surface texture mapping. The purpose of clipping is
to find single or multiples surfaces cutting the
volume and then bound the intersecting surfaces in
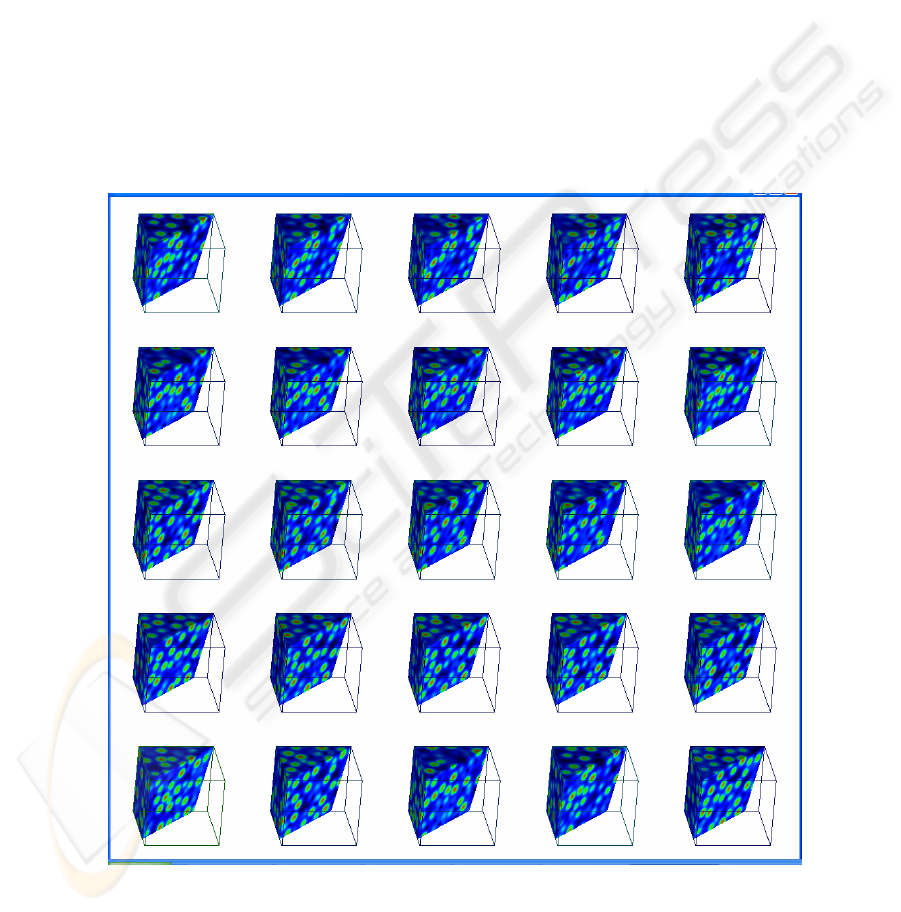
Figure 5: MDV of 25 sets of electronic charge density of liquid MgO (at different simulation times) using 3D surface
texture mapping combined with a planar clipping. One can see, for instance, how the positions of high density regions
(shown by green + red colors) change with time. A multiscale color map described in Figure 2 caption is used.
A SYSTEMATIC APPROACH TO MULTIPLE DATASETS VISUALIZATION OF SCALAR VOLUME DATA
63
the form of simple polygons. These polygons
determine the new set of externally visible surfaces
of the volume and the textured data is mapped only
on these polygons. Thus, only the surfaces defined
by a set of visible clipping polygons (single or
multiple) are rendered. Each clipping polygon is
tessellated in terms of triangles. During initial
rendering, the six planar surfaces of simulation box,
each represented in terms of two adjacent triangles
are rendered. During subsequent clipping process,
intersections of these 12 triangles with a given
object are calculated. If a triangle is intersected, it is
divided into two polygons that lie on either side of
the clip plane; and one of them is discarded.
Intersection points are used to define new polygons
to map textures. Every time the clip plane is
adjusted in 3D space, intersections of the original 12
triangles are determined to define polygons
(Stephenson and Christiansen, 1995), which bound
new visible surfaces
A planner clipping is demonstrated in Figure 4.
Every time a clip plane changes (rotates or translates
in space), new surfaces for texture mapping are
generated. We have also implemented a box-
clipping object, which is represented as a set of six
clipping planes. Visible surfaces are obtained by
repeating the same process, which is used in the case
of a single plane. The clip box can be rotated,
translated and resized. Figure 4 also shows the outer
and inner box clipping. Outer box clipping means
removing portion of 3D object that lie outside the
clipping box while the inner box clipping is just the
reverse of outer box clipping where the portion
outside the box is retained and portion inside the box
is removed.Figure 5 illustrates the simultaneous
visualization of 25 datasets.
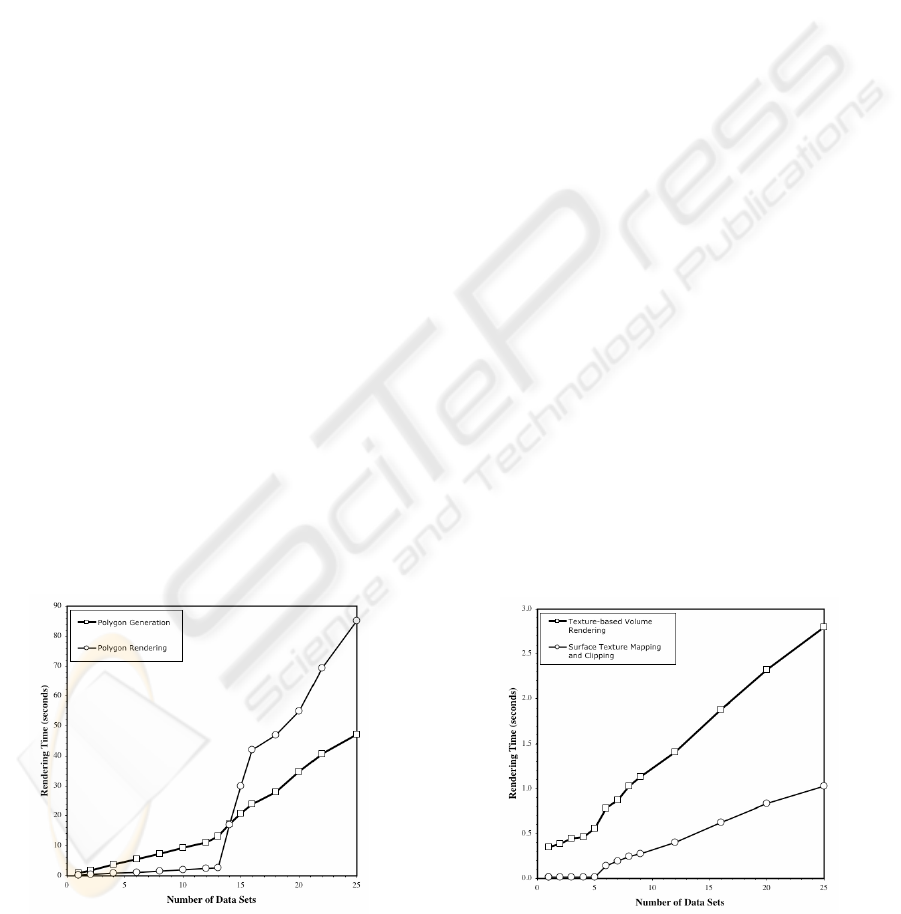
Figure 6: The calculated time as a function of the number
of datasets used in MDV. Squares represent the time for
generation of multiple lists for polygons representing
isosurfaces and circles represent the time for subsequent
rendering of polygons.
6 RESULTS AND DISCUSSION
We now present the performance measurements of
three MDV techniques described in the Sections 3, 4
and 5. The results are based on the 3D charge
density dataset, which was produced by parallel
quantum mechanical simulations for different
samples, conditions and time points. The size of
each dataset used is 256
3
, which represents today’s
common moderate-sized scalar volume data. The
rendering timings are calculated for single dataset
visualization (SDV) using the viewport of size 512
2
and for multiple dataset visualization (MDV) using
the viewport of size 1024
2
. A bigger viewport in
MDV provides bigger space for simultaneous
display of multiple datasets. Thus, the differences in
rendering speeds between SDV and MDV should
reflect the differences in the amounts of data to be
processed as well as the number of the pixels to be
displayed. The performance measurements have
been conducted on a Windows XP PC with 3.2 GHz
Pentium IV processor and 1 GB RAM. It uses an
NVidia GeForce FX 5200 graphics board with 128
MB graphics memory and 110 MB texture memory.
The implementation is based on C/C++, OpenGL
and GLUT.
Our analysis in the case of isosurface extraction
involves the calculation of the time for conversion of
the data into a set of polygons representing
isosurface and the time for subsequent rendering
with polygon rendering hardware (Figure 6). For
operations like rotation, translation and scaling, only
the rendering time is relevant. The calculated
rendering time is 0.16 seconds for SDV, and remains
below 3 seconds for MDV with up to 13 datasets. A
rapid increase starts when the number of datasets
increases reaches 14. This can be associated with the
Figure 7: The calculated rendering time as a function of
the number of datasets used in MDV. Squares represent
the time for the texture-based volume rendering and
circles represent the time for 3D surface texture mapping
combined with clipping.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
64

limited memory so that more than 14 sets of
polygons representing isosurfaces cannot be stored
in the memory concurrently thereby involving
substantial memory swapping. The time for
multiple execution of Marching Cubes’ algorithm to
produce multiple sets of polygons increases more
rapidly with the increasing number of independent
datasets after 14 (Figure 6).
For the texture-based MDV, the calculated time
represents the time to map the textured data on a
series of slices (polygons) with an appropriate
blending enabled, i.e., to perform texture-based 3D
rendering (Figure 7). All 3D textures are assumed to
be already loaded/generated. The SDV rendering
time is 0.013 seconds whereas the MDV time is 1.12
and 2.81 seconds, respectively, for 9 and 25 datasets.
Note that the total number of slices to be rendered is
6400 for 25 datasets, compared to 256 slices for
single dataset. The number of independent texture
mappings becomes critical for texture-based MDV
as the number of datasets increases. Moreover, when
multiple sets of data are loaded as multiple textures,
all or most of the textures needed for generating
current view cannot be resident in the texture
memory at same time due to its limited size. So
swapping of the texture objects takes place between
the main memory and texture memory and the bus
bandwidth becomes a bottleneck. In our study, we
notice that up to five 3D textures can be concurrent
resident of the texture memory. This explains the
presence of a small abrupt increase in the calculated
time when the number of 3D textures (or
equivalently, 3D datasets) increases from 5 to 6.
Based on our preliminary tests discussed above,
the texture-based MDV shows a better performance
than the isosurface-based MDV (Table I).
However, the frame-rates are low for the both
approaches in the context of interactivity. Even for
the moderate datasize of 256
3
considered here, the
frame-rate drops below 1 for six or higher number of
datasets. In the case of isosurface, if one is interested
to change the threshold isovalue to get a new set of
isosurfaces during MDV process, the processing
time becomes much longer.
We have also calculated the rendering time for
the proposed MDV approach, which uses 3D surface
texture mapping combined with a planar or box
clipping. The MDV time is very small for datasets
up to 5 and then it increases suddenly for 6 sets and
thereafter increases gradually as the number of
datasets increases (Figure 7). The rapid increase can
again be associated with the limited memory as
discussed earlier. The results show that the proposed
MDV improves the frame-rate substantially (Table
I). First of all, the frame-rate remains above one.
Second, it is larger by a factor of 3 than that of the
3D volume texture rendering for MDV with 6 to 25
sets of data. This is consistent with the fact that the
number of the slices or polygons rendered is
dramatically reduced in the texture-based surface
rendering, compared to that in the corresponding
volume rendering. For simultaneous visualization of
25 datasets, each of size 256
3
, the 3D surface texture
mapping needs a couple of hundreds of polygons,
compared to 6,000 slices (or more polygons)
required by the 3D volume texture mapping. Third,
the differences with respect to the isosurface-based
MDV are even bigger (Table I).
7 CONCLUSIONS
In this paper, we have presented a systematic
analysis of the multiple dataset visualization (MDV).
Many applications require datasets to be grouped
and analyzed together based on certain criteria such
as samples, conditions, and time-points. In
particular, we have performed MDV using two well-
known techniques, which are based on isosurface-
extraction and hardware-assisted texture mapping.
Our results have shown that the both techniques
yield low frame-rates when six or more sets of
moderate-sized (256
3
) data are visualized
concurrently. Besides the issues related to the larger
memory requirements and limited display sizes, one
important challenge is to make MDV interactive.
We have proposed an interactive MDV approach in
which the 3D surface texture mapping and clipping
are exploited. The basic idea is to avoid the
rendering of all the textured slices to cover complete
or nearly complete volume data by restricting texture
mapping onto the only externally visible surfaces of
each volume data. The interior of the volume is then
explored by exposing (and subsequently rendering)
new surfaces with dynamic manipulation of some
form of clipping such as a planar or box clipping
enabled. For as many as 25 sets of 256
3
data
visualized concurrently, our approach yields more
than one frame per second, compared to much less
than one frame per second with isosurfacing and 3D
volume texture mapping. Our scheme is expected to
be an effective MDV tool since it exploits the
essence of general clipping to uncover important,
otherwise hidden details of volume data sets to the
extent which is often not feasible with other
techniques. At the same time, it also benefits from
the increasing processing power and flexibility of
graphics processing unit.
A SYSTEMATIC APPROACH TO MULTIPLE DATASETS VISUALIZATION OF SCALAR VOLUME DATA
65
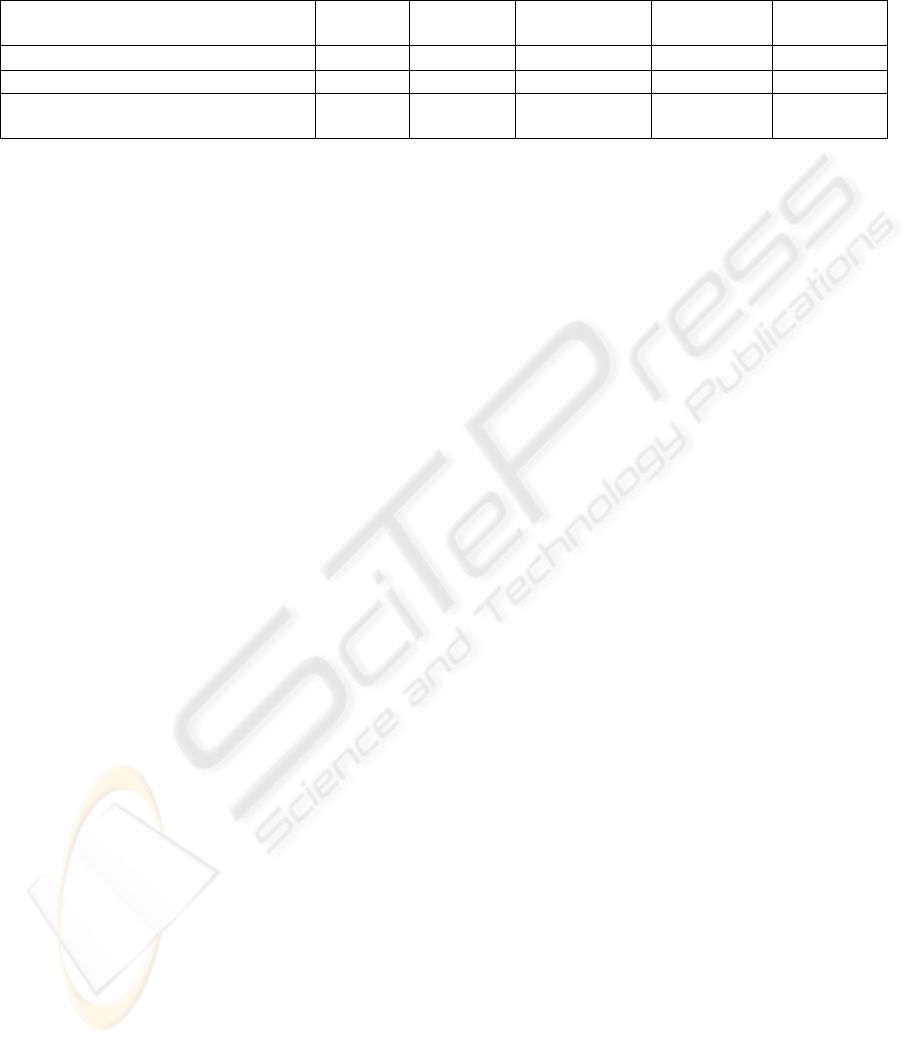
Table 1: Comparison of the calculated frame-rates (number of frames per second, fps) between three different methods for
single dataset visualization (SDV), and multiple dataset visualization (MDV) with different number of datasets.
We plan to implement more complex clip
geometries and extend the performance analyses to
multiple sets of 512
3
or larger data.
ACKNOWLEDGMENTS
This work was supported by NSF Career (EAR 0347204)
and ITR (ATM 0426601) grants.
REFERENCES
Abrams, M. and Shaffer, C., 1996. www.sv.vt.edu/future
/ari/white/abrams_shaffer.html
Cabral, B., Cam, N. and Foran, J, 1994. Accelerated
volume rendering and tomographic reconstruction
using texture-mapping hardware. Proc. 1994 Symp.
Volume Visualization. 91-98.
Cline, H., Lorensen, W., Ludke S., Crawford, C., and
Teter, B., 1988. Two algorithms for three dimensional
reconstruction of tomographs, Medical Physics. Vol.
15.
Codes, 2005. Electronic calculation packages: PWScf
(www.pwscf.org) and VASP (cms.mpi.univie.ac.at
/vasp).
Crutcher, R.M., Baker, M.P., Baxter, H., Pixton, J. and
Ravlin, H., 1996. Astronomical Data Analysis
Software and Systems V, ASP Conference Series, Vol.
101.
Cullip, T.J. and Newman, U., 1993. Accelerating volume
reconstruction with 3d texture hardware. Technical
Report TR93-027, University of North Carolina,
Chapel Hill, N. C.
Van Gelder, A., and Kim, K., 1996, Direct volume
rendering with shading via three-dimensional textures.
Proc. 1996 Symp. Vol. Visualization, 23-30.
Khanduja, G. and Karki, B. B. 2005. Visualization of 3D
scientific datasets based on interactive clipping.
WSCG Int. Conf. Computer Graphics, Visualization
and Computer Vision, SBN 80-903100-9-5, 33-36.
Lacroute, P. and Levoy, M., 1994. Fast volume rendering
using a shear-warp factorization of the viewing
transformation. Proc. SIGGRAPH’94, 451-458.
Levoy, M., 1990. Efficient ray tracing of volume data,
ACM Trans. Comp. Graphics., 8, 245-261.
Lorensen, W.E. and Cline H.E., 1987. Marching Cubes: a
high-resolution 3D surface reconstruction algorithm.
Computer Graphics Proc. SIGGRAPH, 21, 163-169.
Meibner, M., Huang, J., Bartz, D., Mueller, K. and
Crawfis, R., 2000. A practical evaluation of popular
volume rendering algorithms, Proc. of the 2000 IEEE
Symps. Volume Visualization, 81-90.
Parker S., Shirley, P., Livnat, Y. Hansen, C., and Sloan,
P., 1998, Interactive ray tracing for isosurface
rendering, Proc. Visualization ‘98, 233-238.
Stephenson, M. B. and Christiansen, H. N., 1975. A
polyhedron clipping and capping algorithm and a
display system for three dimensional finite element
models. ACM SIGGRAPH.
Schulze, J.P., and Forsberg, A.S., 2004. User-friendly
volume data set exploration in the Cave,
www.cs.brown.edu/people/schulze/vis04-contest.
Weiler, M., Westermann, R., Hansen, C., Zimmerman, K.,
and Ertl, T., 2000.. Level-of-detail volume rendering
via 3D textures. In Proceedings of IEEE Volume
Visualization 2000.
Weiskopf D., Engel, K., and Ertl, T., 2003. Interactive
Clipping Techniques for Texture-Based Volume
Visualization and Volume Shading. IEEE
Transactions on Visualization and Computer Graphic,
9, 298-312.
Weiskopf, D., Engle, K. and Ertl, T., 2002. Volume
clipping via per-fragment operations in texture-based
volume visualization, IEEE Visualization Proc. 2002,
93-100.
Westermann, R. and Ertl, T., 1998, Efficiently using
graphics hardware in Volume Rendering Applications.
SIGGRAPH 1998 Proc., 169-179.
Westover, L., 1990. Footprint evaluation for volume
rendering. SIGGRAPH’90, 367-376.
Wilson B., Ma, K. and McCormick, P.S., 2002. A
hardware-assisted hybrid rendering technique for
interactive volume visualization. Proc Vol.
Visualization and Graphics Symp. 2002.
Forguson, 1992. Visual Kinematics, Inc. (Mountain View,
CA USA), FOCUS User Manual, Release 1.2.
Wilson, O., van Gelder, A. and Wilhems, J., 1994. Direct
volume rendering via 3d textures. Technical Report
UCSC-CRL-94-19, Jack Baskin School of Eng., Univ
of California at Santa Cruz.
Methods SDV
MDV
4 datasets
MDV
9 datasets
MDV
16 datasets
MDV
25 datasets
Isosurface: Polygon rendering 5.02 1.221 0.556 0.024 0.012
Texture-based volume rendering 7.61 2.153 0.878 0.532 0.357
Clipping with surface texture
mapping
>75 ~75 3.597 1.611 1.002
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
66
