
FACE TRACKING ALGORITHM ROBUST TO POSE,
ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D
PARAMETRIC MODEL APPROACH
Marco Anisetti, Valerio Bellandi
University of Milan - Department of Information Technology
via Bramante 65 - 26013, Crema (CR), Italy
Luigi Arnone, Fabrizio Beverina
STMicroelectronics - Advanced System Technology Group
via Olivetti 5 - 20041, Agrate Brianza, Italy
Keywords:
Face tracking, expression changes, FACS, illumination changes.
Abstract:
Considering the face as an object that moves through a scene, the posture related to the camera’s point of view
and the texture both may change the aspect of the object considerably. These changes are tightly coupled with
the alterations in illumination conditions when the subject moves or even when some modifications happen
in illumination conditions (light switched on or off etc.). This paper presents a method for tracking a face
on a video sequence by recovering the full-motion and the expression deformations of the head using 3D
expressive head model. Taking advantage from a 3D triangle based face model, we are able to deal with any
kind of illumination changes and face expression movements. In this parametric model, any changes can be
defined as a linear combination of a set of weighted basis that could easily be included in a minimization
algorithm using a classical Newton optimization approach. The 3D model of the face is created using some
characteristical face points given on the first frame. Using a gradient descent approach, the algorithm is
able to extract simultaneously the parameters related to the face expression, the 3D posture and the virtual
illumination conditions. The algorithm has been tested on Kanade-Cohn database (Kanade et al., 2000) for
expression estimation and its precision has been compared with a standard multi-camera system for the 3D
tracking (Elite2002 System) (Ferrigno and Pedotti, 1985). Regarding illumination tests, we use synthetic
movie created using standard 3D-mesh animation tools and real experimental videos created in very extreme
illumination condition. The results in all the cases are promising even with great head movements and changes
in the expression and the illumination conditions. The proposed approach has a twofold application as a
part of a facial expression analysis system and preprocessing for identification systems (expression, pose and
illumination normalization).
1 INTRODUCTION
Three dimensional face tracking is an emerging and
a crucial component of many systems in emotional
expression analysis, lip reading, identity recognition,
surveillance etc. However, this is still a challenging
task because of the variability of the faces. This vari-
ability arises from the changes in the pose and fa-
cial expression deformations and from illumination
modifications. Generally speaking, regarding light
compensation, most of the methods proposed are es-
tablished on a set of images in order to compensate
the light effects. Some techniques can build geo-
metrically the set of images (basis) (Ishiyama and
Sakamoto, 2004), and others can derive them from
a collection of pictures taken in different kind of il-
lumination and then use an eigenfaces technique to
create the basis (Dornaika and Ahlberg, 2003) ,(Cas-
cia et al., 2000). Otherwise, in our proposed methods,
the illuminance basis are created directly during the
tracking by optimizing the parameters that control the
effects of a light on a 3D face model. We developed
an algorithm that can express all the effects due to
both expression and illumination, on a 3D face model
as a linear composition of a set of basis. One set can
describe the changes in the expression (these are in-
tegrated in the 3D face model) and the other can deal
with illumination changes taking advantage of the 3D
face model. An inspiring work concerning illumina-
tion changes using basis approach is the one of Hager
(Hager and Belhumeur, 1998) and (Eisert and Girod,
1997).They put the basis for illumination into an ef-
318
Anisetti M., Bellandi V., Arnone L. and Beverina F. (2006).
FACE TRACKING ALGORITHM ROBUST TO POSE, ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D PARAMETRIC MODEL APPROACH.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 318-325
DOI: 10.5220/0001365103180325
Copyright
c
SciTePress

ficient 2D tracking algorithm using parametric mod-
els. Contrarely to this approach that needs training
for creating a good basis, our methods only use the
information resulting from a 3D model and a fixed
set of illumination sources. Using this illumination
compensation based approach, we improved the qual-
ity of the 3D tracking also in realistic environment.
Concerning 3D tracking in literature, there are sev-
eral methods that like ours use a 3D template. They
can be divided into two categories: one using a geo-
metrical shape (plane or cylinder) and the other using
a 3D head wire-mesh model (Anisetti et al., 2005).
(Xiao et al., 2002) uses a cylinder to estimate the pose,
and an Active Appearance Model (AAM) method is
used to map the appearance head model to the face
region. This method can handle limited head motion,
because after a certain level of rotation the distortion
due to the difference between the head and the cylin-
der are not negligible. The uses of 3D head model
is a solution to improve the tracking, specially if the
model can also morph according to certain expres-
sion parameters. Many recent works choose this solu-
tion (Tao and Huang, 1999), (Matthews et al., 2003)
and (Dornaika and Ahlberg, 2004). (Tao and Huang,
1999) uses explanation-based facial motion tracking
algorithm, based on a Piecewise Bezier Volume De-
formation model (PBVD). In this way, they can (in
two steps) track the posture and the head deforma-
tion. (Matthews et al., 2003), (Dornaika and Ahlberg,
2004), use another method that differs from our warp-
ing technique, because theirs is an affine piecewise in-
stead of being based on expression shape basis. These
control the position changes of every pixel of the im-
ages (not only the vertices) according to the expres-
sion parameters. This means that instead of the usual
sequence of operations for every pixel (which is find-
ing out which triangle it belongs to and performing
for it the affine warp for that triangle) we do an all
in one operation. This simplification is made thanks
to the 3D face model definition for the face expres-
sion for every triangle, which simplifies the operation.
Another difference, is that our methods do not need a
training set (Matthews et al., 2003), (Dornaika and
Ahlberg, 2004), to learn the parameters that control
the shape modes of the face. Similarly to the (Cootes
et al., 2000) approach, we use an optimization algo-
rithm that matches shape and texture simultaneously.
The difference is that we perform it inside the warp-
ing algorithm, considering at the same time the face
movement parameters and the roto-translation ones.
The novelty of our approach, regarding the expres-
sion inference, consists in the use of a set of basis
that deal with the face deformation directly inside the
warping transformation. Concerning the illumination
compensation, we use a 3D model for a sort of illu-
mination effect prediction. This implies that together
with the warping parameters, we extract the action
unit coding (FACS) and the position of the 3 virtual
light sources, obtaining a greater precision in track-
ing. Many algorithms avoid issues related to the il-
lumination estimation by updating the template frame
after frame. As a result, any error in motion estima-
tion is consequently propagated. Besides that, they
cannot take into account sudden light variations like
a light turning on abruptly. On this robust algorithm,
we developed some interesting applications that use
the normalized face as a final result of pose and ex-
pression inferences. For instance, we propose a sys-
tem for classifying the emotional facial expressions in
(Andreoni et al., 2004) or for identifying certification
of a subject in (Damiani et al., 2005). In the following
sections, we will explain all developed techniques in
details.
2 A PARAMETRIZED 3D FACE
MODEL
In literature there are many facial models both of
2D and 3D. Considering our objectives, we chose a
3D model for precision in the tracking estimation,
for useful in illumination inference and for self oc-
clusion monitoring. Furthermore, we need to adapt
the 3D model to an image by aligning some fiducial
points with the corresponding points on the 3D model.
Therefore the 3D model must be morphable both for
expression and for face adaptation on these fiducial
points. Summarizing, we need a model with these
characteristics:
1. Triangle based. This feature makes the model
suited for the affine transformation, that, by defini-
tion, maps triangles into triangles. It then becomes
useful in expression morphing;
2. Animation and shape parametrization. This makes
it possible to describe shape and face expression
(Animation Unit) by a simple linear formula:
g =
g + Sσ + Aα (1)
where the resulting vector is g,
g is the standard
shape model vertices coordinates, S and A are the
Shape and Animation Unit (AUV, basis for anima-
tion). The Shape Units are controlled by the σ pa-
rameter and they are used to determine the head
specific individual shape. The animation units are
controlled by the α parameter.
Considering these characteristics, a 3D morphable
model like (Blanz and Vetter, 2003) could be a op-
timal choice. Yet our aim is to use a free 3D model
not dependent on training faces, and to demonstrate
that with only few adaptations we can use a general
purpose 3D face model. In our previous works (Bel-
landi et al., 2005) (Damiani et al., 2005) we chose
FACE TRACKING ALGORITHM ROBUST TO POSE, ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D
PARAMETRIC MODEL APPROACH
319
the Candide-3 model for our tests, obtaining good re-
sults. We also used the Candide-3 in this work for cer-
tain tests, but we decided to develop a more realistic
model to deal better with expressions and especially
with illumination changes.
2.1 3D Individual Shape
Parametrization
Following these main characteristics, we can use the
shape parameters of the 3D model σ, for computing
a 3D individual shape model and texture on a sin-
gle frame representing a frontal and neutral view of
the subject. This represents the best fitting 3D model
template on the subject’s face and is tightly coupled
to any different individuals. This fit is performed on
the frontal frame manually, choosing some fiducial
points (they could be selected by any automatic se-
lection process) corresponding to some relevant fea-
tures (eyebrows, eye, nose, mouth). Then, with a
constrained optimization algorithm, we compute the
model’s shape parameters in order to minimize the er-
ror between the correspondent points p on the model
and the manually chosen ones. We define the error as
follows:
(σ, t, R)= w(g(σ, t, R) − p)
2
(2)
We weight the error on the model’s points accord-
ing to the intrinsic insecurity of every point selection.
This method showed a great robustness to the noisy
coordinates of the picked points, managing every time
to reach a 3D template good enough for the tracking.
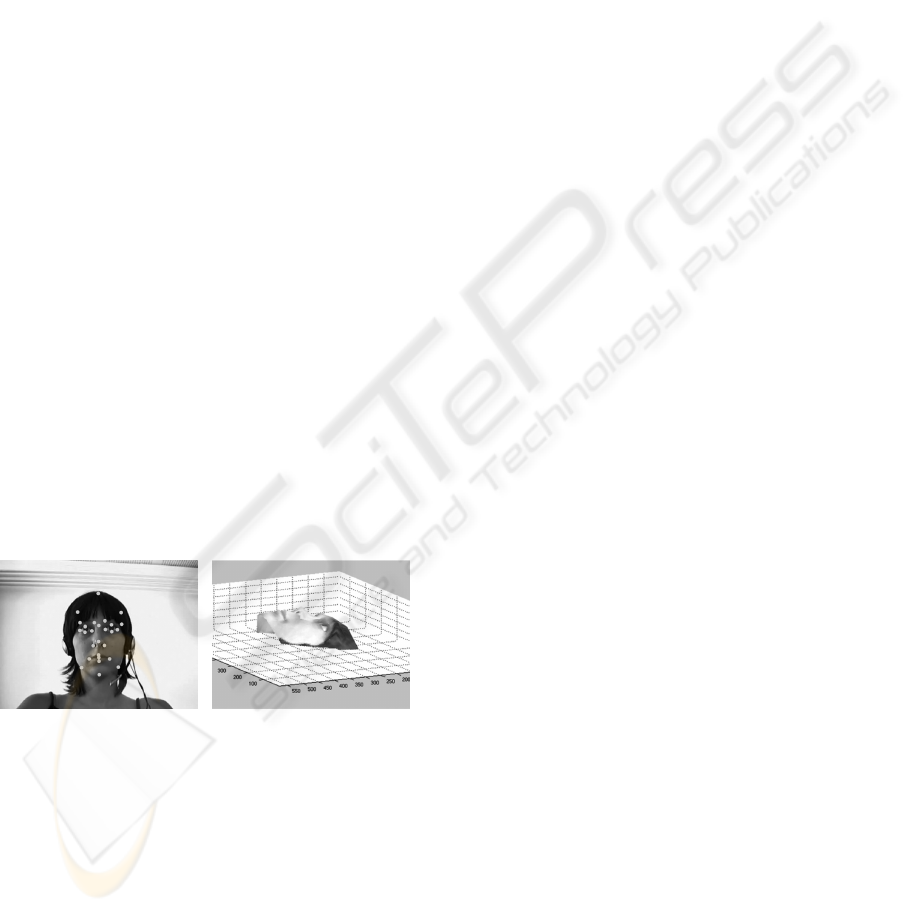
Figure(1) shows an example of the creation of an in-
dividual template.
(a) Feature Point (b) Template 3D
Figure 1: Example of 3D template extraction process.
Obviously, following this shape minimization we
do not deal with the third dimension of the face, but
we only consider the 2D deformations as the best fit
shape. Nevertheless, using this approximate shape
parameterized process, the tracking still produces a
good result thanks to the error correction phase ex-
plained in the following sections. In order to test
the difference between this rough shape model and
a more realistic one, we use a real 3D mesh of a sub-
ject’s face extracted by a stereo camera system.
2.2 3D Model Morphing for
Expression Recognition
Another important feature of the 3D model is its mor-
phability. During the tracking process, for expres-
sion inference, we deduce expression parameters α,
while shape parameters σ remains constant because
they represent an intrinsic property of the subject. In
order to do this, we must find a set of basis B that can
express linearly the changes of the expression shapes
of our 3D template T starting from neutral template
T
0
obtaining one formula such as followed:
T = T
0
+
n
i=1
α
i
B
i
(3)
We know that the vertices final position of every
triangle of 3D model are:
V
f
= V
i
+
N
j=1
α
j
A
j
(4)
where V
f
is the matrix containing the coordinates
of the vertices in the final position, where α
j
are the
parameters that take into account every single move-
ment of the N possible ones, A
j
is the matrix that
contains the components for the j-expression. A is
a sparse matrix where nonzero values on a column j
are the ones related to the vertices interested by that j-
movement. Considering 3 vertices of the k
th
triangle,
we can find the transformation matrix M
k
that brings
a point belonging to the first triangle into a point on
the second in this way:
V
fk1
V
fk1
V
fk1
=
V
ik1
V
ik1
V
ik1
M
k
(5)
From which it follows that the transformation for
each triangle can be written
M
k
=
V
ik1
V
ik1
V
ik1
−1
V
fk1
V
fk1
V
fk1
= I +
V
ik1
V
ik1
V
ik1
−1
(
N
j=1
α
j
A
jk
)
= I +
N
j=1
α
j
˜
B
jk
(6)
Where A
jk
are the matrix of the displacement re-
lated to the j-expression for the k-tern of points, and
˜
B
jk
is the transformation matrix for the j-expression
and k-tern. In this way every i
th
point of the tem-
plate T, according to the triangle it belongs to, can be
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
320

derived from the template T
0
in this way:
T
ik
= T
0k
M
k
(7)
= T
0ik
+
N
j=1
α
j
T
0ik
˜
B
jk
(8)
= T
0ik
+
N
j=1
α
j
B
jk
(9)
In this way we obtain the set of basis of the desired
formula (3). In fact, the points B
jk
are depended only
from the definition of the Animation Units and from
the initial template. Now we can write any expression
deformation as weighed sum of a set of fixed basis.
This characteristic of the model will be exploited in
the tracking phase, making the algorithm able to esti-
mate the set of α directly.
2.3 3D Illumination Basis
We created a set of basis in order to compensate the
effects of the light changes. Since the light sources
are ”distant”, all the points on a face will be at the
same orientation according to the light-source direc-
tion. This means we will have the same light intensity
reflected back to the viewer from all the points of the
face. We can then compute the intensity of that face,
depending on the intensity and direction of the light
source, the intensity of ambient light, and store that
into a matrix. For the Lambertian case, there is no
problem with multiple (distant) light sources it is just
a matter of adding up their individual contributions.
It has been demonstrated that in case of Lambertian
surfaces, in absence of self shadowing, given 3 basis
of 3 linear independent light source direction, one can
reconstruct the image of the surface under a new light
direction, by the linear combination of the 3 basis. In
fact the irradiance at a point x can be given by
I = αnL (10)
where n is the normal vector to the surface,α the
albedo coefficient and L is the power and the direc-
tion of incident light rays. So, firstly we calculate the
direction of the normal vector of the normal direc-
tion of each face. Then we create a matrix in which
we associate at every point of the template its normal
vector. Naming B
x
, B
y
and B
z
the vectors of each
direction component than the new template T can be
written starting from the previous template T
0
as:
T = T
0
+
3
l=1
λ
l
(B
x
cos(θ
l
+ rot
x
)+
+ B
y
cos(φ
l
+ rot
y
)+B
z
cos(ψ
l
+ rot
z
))
(11)
where θ
l
,φ
l
,ψ
l
are the directions of every l
t
h light
and rot
x
,rot
y
,rot
z
are the estimations of the rotation
of the template. The λ
l
parameters are the intensity of
each light, and the parameters that will be estimated
by the algorithm. Furthermore, this set of normal vec-
tor basis are useful in the managing of the hidden tri-
angle in the tracking algorithm. Thanks to that we can
know which is the facets that is not visible anymore
and we do not use it in the tracking algorithm.
3 3D MOTION, EXPRESSION,
AND ILLUMINATION
RECOVERY
Our goal is to obtain posture estimation parameters,
the AUV deformation parameters and illumination
condition parameter in one minimization process be-
tween two frames using morphing and illumination
basis technique explain in previous session. First of
all, for clearness, we describe the steepest descent
algorithm for 3D posture and morphing estimation.
Based on the idea that 2D face template T
i
(x),(ex-
tracted by projecting 3D Template T on image plane)
appears in next frame I(x) albeit warped by W (x; p),
where p =(p
1
,...,p
n
,α
1
,...,α
m
) is vector of pa-
rameters for 3D face model with m Candide-3 anima-
tion units movement parameters and x are pixel coor-
dinate from image plain, we can obtain the movement
and expression parameter p by minimization of the
function (12); in fact if T
i
(x) is the template at time
t with the correct pose and the expression p and I(x)
is the frame at time t +1, assuming that the illumina-
tion condition does not change much, the next correct
pose and expression p at time t +1is obtain by min-
imization of sum of squared error between T (x) and
I(W (x; p)):
x
[I(W (x; p)) − T (x)]
2
(12)
For this minimization we use an approach like (Lu-
cas and Kanade, 1981) with forward additive imple-
mentation that assumes that current estimate of p is
known and iteratively solves for increments to the pa-
rameters ∆p. Equation (12) after some well known
passage becomes:
∆p = H
−1
x
∇I
∂W
∂p
T
[T (x) − W (x; p)]
H =
x
∇I
∂W
∂p
T
∇I
∂W
∂p
(13)
with ∇Iis the image gradient of I evaluated at
W (x; p),
∂W
∂p
is Jacobian of warp and ∆p is the in-
FACE TRACKING ALGORITHM ROBUST TO POSE, ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D
PARAMETRIC MODEL APPROACH
321
cremental warp parameters. Because we need to re-
cover the 3D posture and expression morphing pa-
rameter, we consider that the motion of head point
X =[x, y, z, 1]
T
between time t and t +1is:
X(t +1) = M ·X(t) and expression morphing of the
same point is: X(t +1)=(X(t)+
m
i=1
(α
i
· B
i
)).
Where α
i
and B
i
follows expression based rep-
resentation described in the previous section and
the matrix M follows Bregler (Bregler and Malik,
1998) and the twist representation by (Murray et al.,
1992). With these matrix the motion parameters p be-
comes (ω
x
,ω
y
,ω
z
,t
x
,t
y
,t
z
,α
1
,...,α
m
) presented
in equation , α
i
and B
i
follows expression based rep-
resentation described in the previous section.With this
consideration the warping W (x; p) in (12) becomes:
W (x; p)=M (X +
m
i=1
(α
i
· B
i
)) (14)
In situation of perspective projection, assuming the
camera projection matrix depends only on the focal
length f
L
, the image plane coordinate vector x is ob-
tain with:
x(t + 1)=
x − yω
z
+ zω
y
+ t
x
+ B
x
xω
z
+ y − zω
x
+ t
y
+ B
y
·
f
L
−xω
y
+ yω
x
+ z + t
z
+ B
z
(t) (15)
where:
B
x
=
m
i=1
(α
i
(a
i
− b
i
ω
z
+ c
i
ω
y
))
B
y
=
m
i=1
(α
i
(a
i
ω
z
+ b
i
− c
i
ω
x
))
B
z
=
m
i=1
(α
i
(−a
i
ω
y
+ b
i
ω
x
+ c
i
))
(16)
This function maps the 3D motion and morphing in
image plane. Following the Lucas-Kanade algorithm
the Jacobian matrix
∂
W
∂p
at p =0becomes:
−xy (x
2
+ z
2
) −yz z 0 − x +DB
x
−(y
2
+ z
2
) xy xz 0 z − y +DB
y
·
f
L
z
2
(t)
(17)
where:
DB
x
=(a
1
· z − c
1
· x)+···+(a
m
· z − c
m
· x)
DB
y
=(b
1
· z − c
1
· y)+···+(b
m
· z − c
m
· y)
(18)
Using a forward additive parameter estimate ap-
proach, we are able to obtain the correct 3D motion
posture and morphing parameters of the template be-
tween two frames in one minimization phase. In order
to obtain more robustness for global and local illumi-
nation changes, we also introduce in our minimiza-
tion algorithm another five additional parameters us-
ing linear appearance variations. If we consider the
image template T (x) as:
T (x)+
5
i=1
λ
i
B
i
(x) (19)
where B
i
i =1,...5 is a set of known appearance
variation images and λ
i
,i =1,...5 are the appear-
ance parameters. Global illumination changes can be
modelled as an arbitrary change in gain and bias be-
tween the template and the input image by setting B
1
to be the T template and B
2
to be the unitary ”all in
one” image. For lateral illumination we use the other
illumination basis B
i
i =3,...5 explained in the pre-
vious section. Using the equations 19 instead of the
T (x) in 12 we obtain the following equation that we
should minimize:
min
x
[I(W (x; p)) − T (x) −
5
i=1
λ
i
A
i
(x)]
2
(20)
In accordance to the linear appearance variations
technique, this can be minimized using the steep-
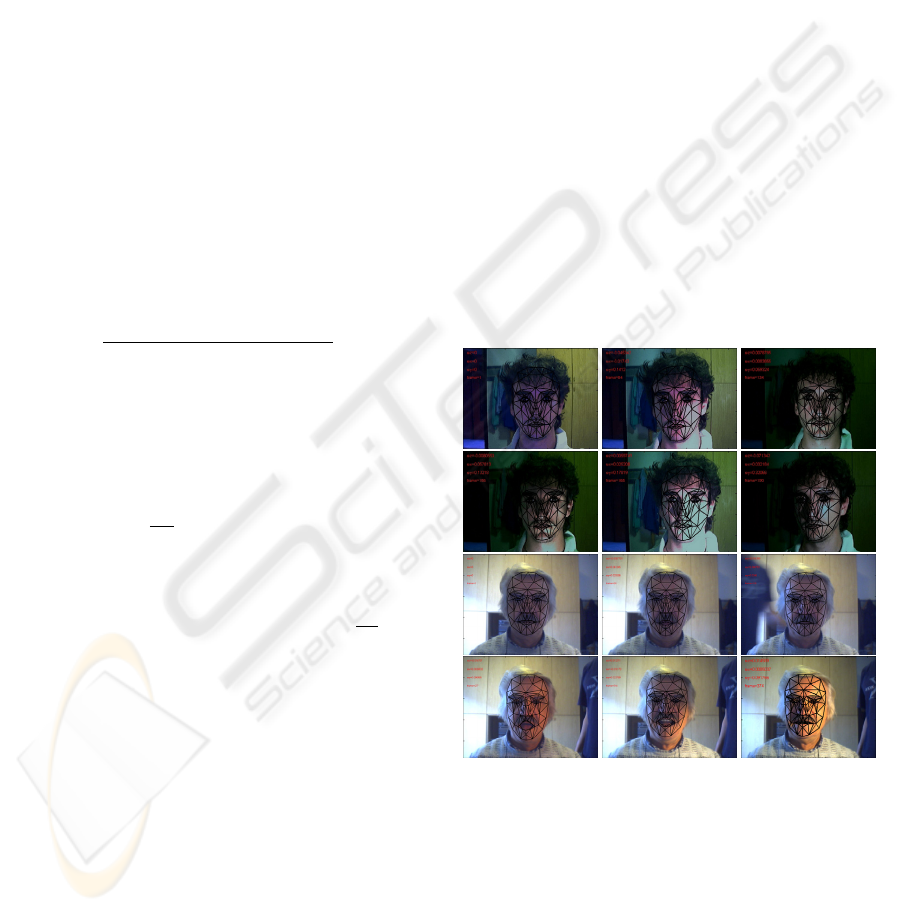
est descent approach. In Figure (2) there are some
examples of tracking experiments with illumination
changes in realistic environment with a standard
lowquality webcam. We demonstrated the improve-
ment in accuracy of posture and expression estimation
with this one step minimization process and the qual-
ity of 3D model AUV tracking in the result section.
Figure 2: Example of tracking during extreme illumination
condition variation and with variation in pose and expres-
sion. In black the tracking mask.
4 TEMPLATE MANAGEMENT
Recovery head position, AUV face morphing with
different illumination environment, as explained be-
fore, is a difficult task for a 3D algorithm because
the face has a complex 3D mesh that produces,
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
322
when moving, frequent illumination changes and self-
occlusions, and because of the difference between the
real face and the adapted 3D model. For that rea-
son, to avoid these problems we have developed some
techniques that we generally call ”Template manage-
ment”. One of these techniques concerns the selec-
tion of the significative part of the 3D Template mask
for performance improvement. In this context, we
perform this optimisation by tresholding the gradi-
ent images in order to reduce the number of points
in the face template. By our experience, the quality of
our tracking does not decrease much by reducing the
number of points and on the other hand the speed of
the algorithm increase of an magnitude order.
4.1 Dissimilarity Analysis
Our principal goal is to estimate posture, expression
and illumination parameters of the subject, in or-
der to reconstruct the normalized neutral frontal view
of the face (reported face). To analyze the quality
of our tracking process, we have developed a tech-
nique called ”dissimilarity analysis” that works on
the retreived face. In fact, if the estimated pos-
ture, illumination and morphing parameters are cor-
rect, the frontal image will be consistent with the face
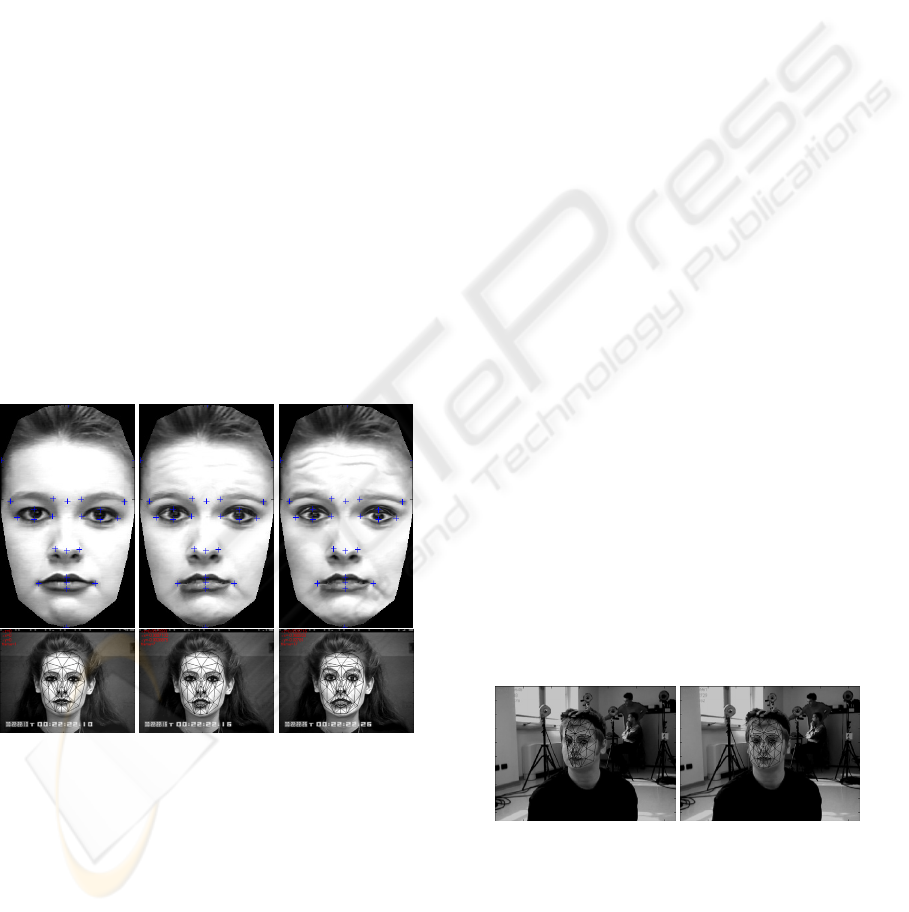
template(Figure(3)). With this approach, good track-
Figure 3: Example of posture, morphing estimation and
frontal view normalization.
ing occurs in good normalization reconstruction. If
there is any approximation error in the posture evalu-
ation, the normalized face suffers of distortion effect
depending on the amount of the error. For this reason,
by analyzing the retrieved images we can estimate the
quality of the tracking that we define the ”dissimilar-
ity level”. This analysis is performed by a 2D tracking
algorithm (with an inverse compositional implemen-
tation) of some fiducial points on the normalized face
(an extended set is represented as ”+” in Figure(3).
If the tracker of this fiducial points shows that there
is a translation bigger than a threshold, we will label
this tracking with low confidential level or with high
dissimilarity. Dissimilarity is useful when we do not
have the correct posture or expression, but we need to
know how accurate our approximations are.
4.2 Dynamic template update and
mosaic technique
After the head pose, the AUV morphing, the illumi-
nation parameter is obtained by the 3D Motion tech-
nique. We update our 3D template with the one re-
covered from the current frame if the confidence level
of dissimilarity is enough. Otherwise, the template is
not modified. With this template updating strategy,
we can track the head and the face movements and
partially deal with drift problems derived from the dy-
namic update. To maintain a good performance, we
continue to update every parameter except the tex-
ture, so that we do not introduce errors in the tem-
plate image that is the main responsible for the drift
effect. Therefore,this solution is not enough for a long
time tracker. For that reason, in the previous work,
we had introduced a technique called ”mosaic tem-
plate” (Anisetti et al., 2005). This technique consists
in creating and dynamically updating a collection of
templates according to the position the subject is in.
Practically speaking, it is the same as storing some
head poses and the relative templates. When the esti-
mated head pose is close to the one of that registered
template, we use it for correcting the drifting prob-
lem by re-alignment. In this way, the drifting effect is
strongly limited without many correction steps. This
also permits to adapt the correction to the dynamic
changes of the environment and of the subject him-
self (Figure(4)). During the posture correction phases
in mosaic techniques, expression parameter are also
re-corrected.
Figure 4: Example of 3D tracking with mosaic correction
(right) during ELITE2002 experiment session.
4.3 Occlusion management
Another important problem about face tracking is the
face occlusion. There are two types of occlusion: self-
FACE TRACKING ALGORITHM ROBUST TO POSE, ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D
PARAMETRIC MODEL APPROACH
323
occlusion (posture occlusion), and occlusion by ob-
ject that do not belong to the face. Because of the
presence of this ”external factors”, some pixels in the
face template should contribute less (or not at all) to
the motion estimation. To perform this, we apply a
well known IRLS technique with a modified compen-
sated approach used by (Xiao et al., 2002). Regard-
ing self-occlusion, our occlusion manager determines
the hidden facets by posture analysis. This techniques
combined with mosaic and dissimilarity analysis, per-
mits to prevent drift error and wrong mosaic tem-
plate registration problems that may occurs with some
other techniques presented in literature.
5 EXPERIMENT RESULTS
We have conducted three type of experiments for eval-
uating the precision of our system. For testing the
tracking quality improvement in cases of morphing
and no morphing 3D tracking. Secondly we tested
our algorithms for extracting the features linked to the
AU (Ekman and Friesen., 1978) on the Cohn-Kanade
Data-Base. Finally we tested our illumination para-
meter estimation with synthetic model videos and in
a realistic environment . For the first experimental
evaluation, we used our data base including 10 dif-
ferent subjects that move, change expression and talk,
registering during ELITE2002 tracking experimental
session. For the real movement evaluation, the data-
base was recorded in the Politecnico laboratory of
Milan with a commercial web-cam at a resolution of
640x480 synchronized with ELITE2002. ELITE2002
system is an optoelectronic device able to track the
three-dimensional coordinates of a number of reflect-
ing markers that we placed on a helmet on the sub-
ject’s head and on the web-cam. This system, thanks
to a set of 6 cameras, can perform a tracking of a point
with a range precision of 0.3 mm. Thanks to this high
posture estimation confidence, we are able to compare
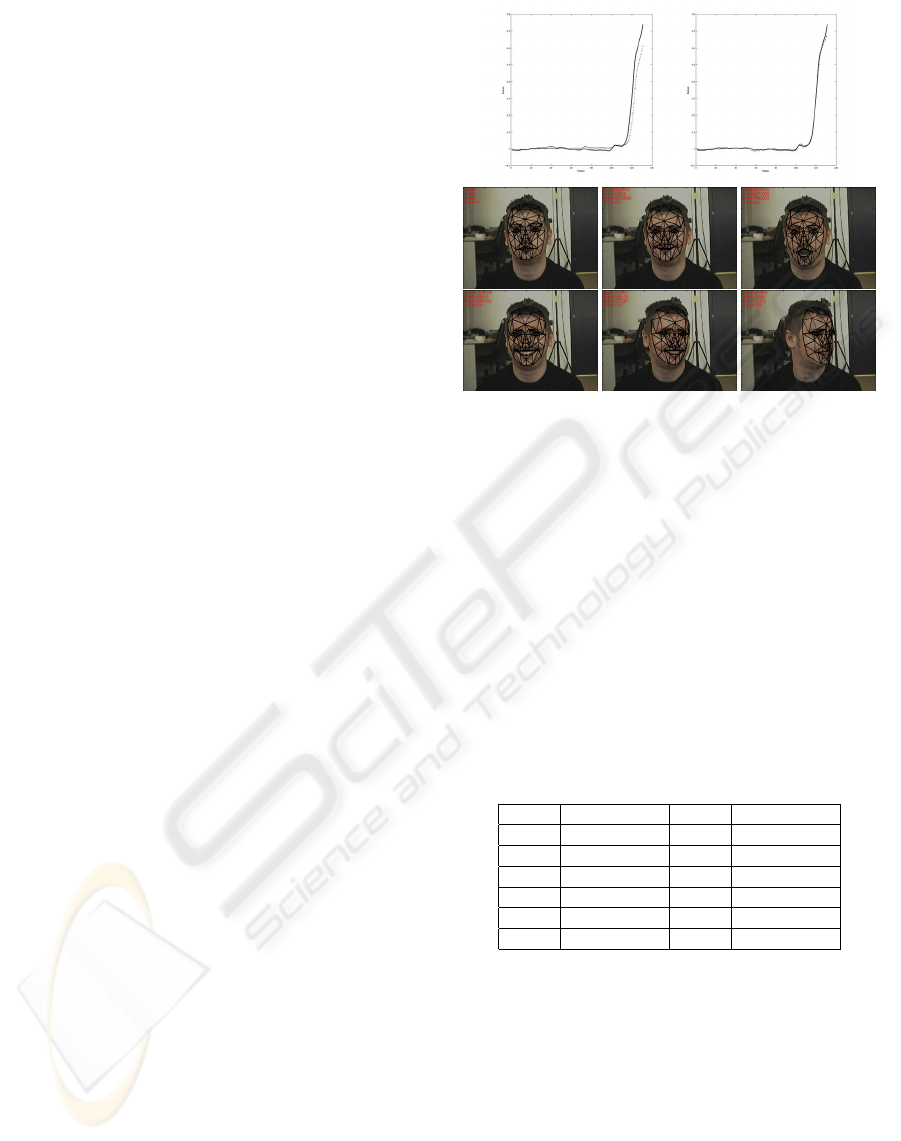
our 3D tracking with real subject movement. Figure
(5) shows an example of estimate tracking values for
yaw rotation (the major rotation in the presented se-
quence) with and without morphing comparing with
ELITE2002. It is clear that if the model could esti-
mate morphing parameters, posture evaluation would
become more precise. By our experiments, the error
of tracking with expression morphing is at maximum
2-3% compared to the ones by no morphing track-
ing. This is an impressive result considering that the
no morphing tracking with some occlusion technique
improvement has good results: a maximum error of 5
grades comparing to ELITE2002. During these ex-
periments, we also monitored the dissimilarity val-
ues that describe the quality of the tracking, obtain-
ing that with morphing the dissimilarity values still
Figure 5: Comparison between ELITE2002 (solid line)
pose estimate and no morphing(left) and morphing (right)
tracking posture estimate. We also present some crop frame.
remain smaller than without the morphing. These re-
sults confirm the strong correlation between the qual-
ity of the tracking and the dissimilarity value and re-
inforce the improvement of the morphing for track-
ing purposes. Regarding the second type of experi-
ments, the table(1) shows the link between the AUV
of Candid-3 model extracted during the tracking and
the AU of FACS codify used for comparing our re-
sults on Cohn-Kanade Data-Base. The same things
could be done with the morphing basis of any 3D mor-
phable face model. Our results using this data base
Table 1: Link between the AUV of Candide-3 model ex-
tracted directly during the tracking and the classical AU
AUV AU AUV AU
1 10 7 42 43 44 45
2 25 26 27 17 8 7
3 20 9 9
4 41 10 23 24 28
5 12 13 15 11 5
6 2
is very promising even using a simply fuzzy classifier.
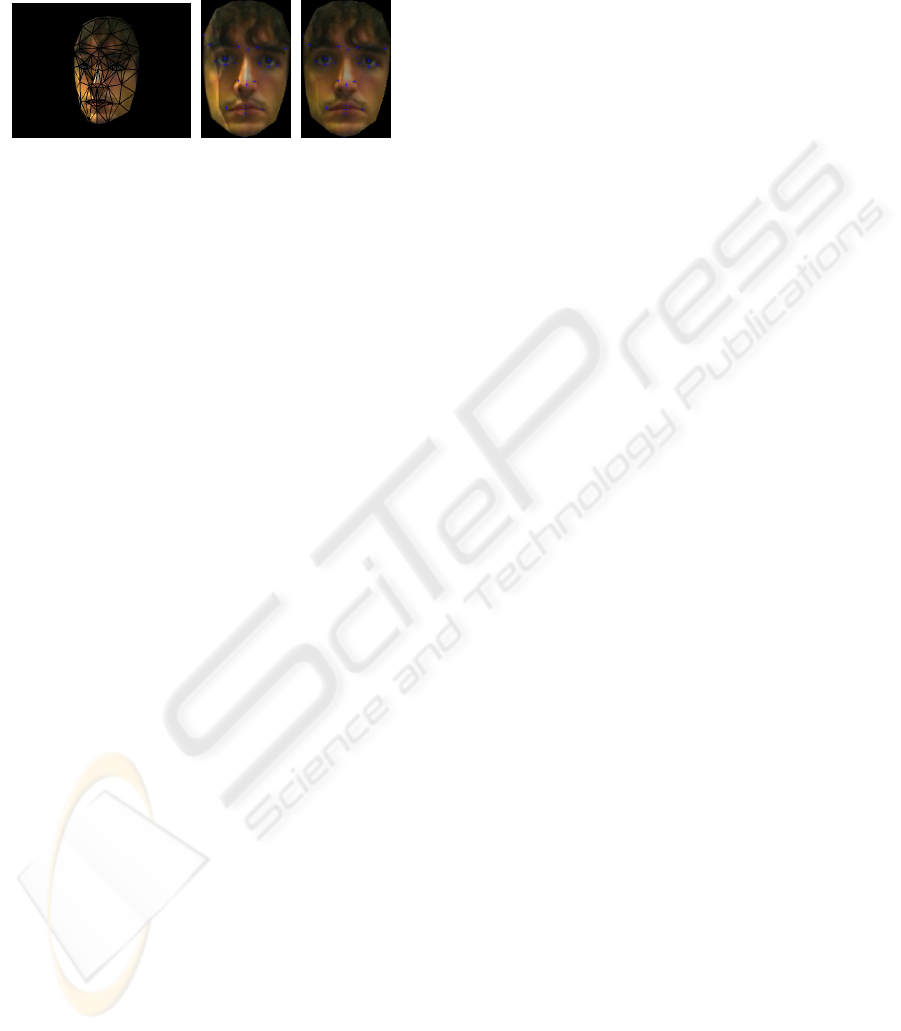
In the last type of experiments, we tested the quality
of the tracking with illumination changes. To do this,
we made synthetic cases where the subject and the
light source rotate in different situations (Figure(6)).
We obtain better quality using illumination techniques
than using IRLS or other weight techniques. Fur-
ther tests were done, performing the tracking in situ-
ations characterized by extreme and localized illumi-
nation conditions (Figure(2)) that thanks to illumina-
tion basis becomes trackable. Experiments were also
made in realistic situations with different light sources
together with expression changes (Figure(2)), and a
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
324
comparison with ELITE2002 system with changes in
illumination. Sumarizing we obtain a better precision
and an extended trackability in all cases of strong il-
lumination changes.
Figure 6: Example of synthetic test for illumination change.
(a) shows the tracked face, (b) and (c) shows face normal-
izate without and with illumination adjusting.
6 CONCLUSION
Concluding, we developed a robust expression analy-
sis oriented face tracker with posture confidence eval-
uations, that makes the tracking good and very close
to ELITE2002 estimation. The algorithm proposed
is robust to face morphing and illumination changes
in spite of the difference between the 3D face model
and the real subject face. Our system performs good
results thanks to the correction techniques like the
mosaic ones and the dissimilarity analysis. We also
showed that this method permits to extracted many
measures linked to the AU that can be used for face
expression detection.
REFERENCES
Andreoni, C., Anisetti, M., Apolloni, B., Bellandi,
V., Balzarotti, S., Beverina, F., Campadelli, P.,
M.R.Ciceri, P.Colombo, F.Fumagalli, G.Palmas, and
L.Piccini (2004). E(motional) learning. In Technol-
ogy Enhanced Learning 2004 (TEL04), Milan Italy.
Anisetti, M., Bellandi, V., and Beverina, F. (Sept. 2005).
Accurate 3d model based face tracking for facial ex-
pression recognition. In Proc. of International Confer-
ence on Visualization, Imaging, and Image Processing
(VIIPO5), pages 93 – 98.
Bellandi, V., Anisetti, M., and Beverina, F. (Sept. 2005).
Upper-face expression features extraction system for
video sequences. In Proc. of International Confer-
ence on Visualization, Imaging, and Image Processing
(VIIP05), pages 83–88.
Blanz, V. and Vetter, T. (2003). Face recognition based
on fitting a 3d morphable model. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
25(9):1063 – 1074.
Bregler, C. and Malik, J. (1998). Tracking people with
twists and exponential maps. In CVPR98, pages 8–
15.
Cascia, M. L., Scarloff, S., and Anthitsos, V. (2000). Fast,
reliable head tracking under varying illumination: An
approach based on registration of texture-mapped 3d
models. IEEE Transaction on Pattern Analysis and
Machine Intelligence, 2000 (22)(4):322–336.
Cootes, T., Edwards, G., and Taylor, C. (Jun. 2000). Ac-
tive appearance mode. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 23(6):681 – 685.
Damiani, E., Anisetti, M., Bellandi, V., and Beverina, F.
(2005). Facial identification problem: A tracking
based approach. In IEEE International Symposium on
Signal-Image Technology and InternetBased Systems
(IEEE SITIS’05).
Dornaika, F. and Ahlberg, J. (2003). Face and facial fea-
ture tracking using deformable models. International
Journal of Image and Graphics.
Dornaika, F. and Ahlberg, J. (Aug. 2004). Fast and reliable
active appearance model search for 3-d face tracking.
IEEE Transactions on Systems, Man and Cybernetics,
34(4):1838 – 1853.
Eisert, P. and Girod, B. (‘July 1997). Model-based 3d-
motion estimation with illumination compensation. In
Conference Publication.
Ekman, P. and Friesen., W. (1978). Facial action coding sys-
tem: A technique for the measurement of facial move-
ment. Consulting Psychologists Press.
Ferrigno, G. and Pedotti, A. (1985). Elite: a digital ded-
icated hardware system for movement analysis via
real-time tv signal processing. IEEE Trans Biomed
Eng., pages 943–950.
Hager, G. D. and Belhumeur, P. N. (1998). Efficient region
tracking with parametric models of geometry and illu-
mination. IEEE Transaction on Pattern Analysis and
Machine Intelligence, 1998 (20)(10):322–336.
Ishiyama, R. and Sakamoto, S. (2004). Fast and accurate
facial pose estimation by aligning a 3d appearance
model. In Proc. of 17th international conference on
pattern recognition (ICPR’04).
Kanade, T., Cohn, J., and Tian, Y. (2000). Comprehen-
sive database for facial expression analysis. Proc.
4th IEEE International Conference on Automatic Face
and Gesture Recognition (FG’00), pages 46–53.
Lucas, B. and Kanade, T. (1981). An iterative image reg-
istration technique with an application to stereo vi-
sion. Proc. Int. Joint Conf. Artificial Intelligence,
pages 674–679.
Matthews, I., Ishikawa, T., and Baker, S. (2003). The tem-
plate update problem. In Proc. of the British Machine
Vision Conference.
Murray, R., Li, Z., and Sastray (1992). A mathematical
introduction to robotic manipulation. CRC press.
Tao, H. and Huang, T. (1999). Explanation-based facial
motion tracking using a piecewise bier volume defor-
mation model. In CVPR99.
Xiao, J., Kanade, T., and Cohn, J. (2002). Robust full-
motion recovery of head by dynamic templates and
re-registration techniques. Proc. of Conference on au-
tomatic face and gesture recognition.
FACE TRACKING ALGORITHM ROBUST TO POSE, ILLUMINATION AND FACE EXPRESSION CHANGES: A 3D
PARAMETRIC MODEL APPROACH
325
