
SURVEILLANCE OF OUTDOOR MOVING TARGETS
Matching Targets using Five Features
Nalin Pradeep S.
Vision Technologies Group,Sarnoff Innovative Technologies Private Ltd,Bangalore,India
Mayur D. Jain
Microsoft(R&D) India Private Ltd,Hyderabad,India
Keywords: Object Segmentation, Tracker, Five Features, Centroid, Shape and Color Histogram.
Abstract: The proposed video surveillance method comprises segmentation of moving targets and tracking the
detected objects through five features of the target object. We introduce motion object segmentation based
on mean and variance background learning model, and subtraction using both color and edge information.
The cognitive fusion of color and edge information helps identifying foreground object. The combination of
the five features spatial positions, LBW, Compactness, Orientation and color histogram through particle
filter approach tracks the segmented objects. These five features help in matching the target tracks during
occlusions, merging of targets, stop and go motion in vary challenging environmental (rainy and snowy)
conditions shown in the results. Our proposed method provides solution to common problems related to
matching of target tracks. We provide encouraging experimental results calculated on synthetic and real
world sequences to demonstrate the algorithm performance.
1 INTRODUCTION
The main purpose of video surveillance is to allow
for a secure monitoring. The primary research issue
of Video Surveillance is automated detection and
tracking objects, events and pattern. Nowadays
video surveillance is a mature discipline aiming to
define techniques and systems for processing videos
from cameras placed in a specific environment to
extract the knowledge of meaningful moving
entities. The high level description of a video stream
relies on the detection and accurate tracking of
moving objects, and on the relationship of their
trajectories to the scene.
Recently, a significant number of trackers have
been proposed. Some deal with low-level feature
tracking while others deal with high-level
description such as event detection, recognition,
classification as human/vehicle and even trajectory
descriptions. For the success of high-level
description it relies very much on accurate detection
and tracking of moving objects in varying
environmental conditions. For a successful tracker to
exist under testing conditions it needs to overcome
situations of merge, occlusions, start-stop motion of
targets. Utsumi and Ohya, 1998 proposed a method
of extracting a moving object region from each
frame in a series of images using statistical
knowledge about the target. Haritaoglu, Harwood
and Davis, 2000 classified the feature trackers into
several categories with their functionality (tracking
single-multiple objects, handling occlusion)
In this paper, we address the problems of
detection, tracking and matching the tracks of
moving objects in the context of video surveillance.
With the help of condensation algorithm through
particle filter (Isard and Blake, 1998) we could
experiment with multiple objects merging, occluding
under varying conditions (like rainy, snowy).
Section 2 describes the algorithm for the moving
object segmentation. The approach used builds a
background model using both color and gradient
information and then performs background
subtraction using these models (Javed, Shafique and
Shah, 2002) The cognitive fusion of color and edge
information gives the accurate object contour and
helps to remove noise and small regions, further
updated with median filter. Section 3 focuses on the
395
Pradeep S. N. and D. Jain M. (2006).
SURVEILLANCE OF OUTDOOR MOVING TARGETS - Matching Targets using Five Features.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 395-401
DOI: 10.5220/0001367003950401
Copyright
c
SciTePress
tracker structure. The five features are extracted and
target tracks matched. The state vector of a target
includes spatial position (centroid), Length by Width
(LBW) ratio, Orientation, compactness, color
histogram. These features are updated through
sample-based representation of recursive Bayesian
filter applied iteratively (Esther, koller-Meier, Frank
Ade, 2000). Factors such as unexpected intruders,
occlusion, merging of targets with noise may affect
the efficiency of tracking. To overcome this, most
reliable cues motion, color and shape features are
combined. Section 4 describes the matching of target
tracks using the five features. The features which
form the state vector of a track are updated with
newly appearing or disappearing targets. In section
5, we demonstrate the result of our system on data
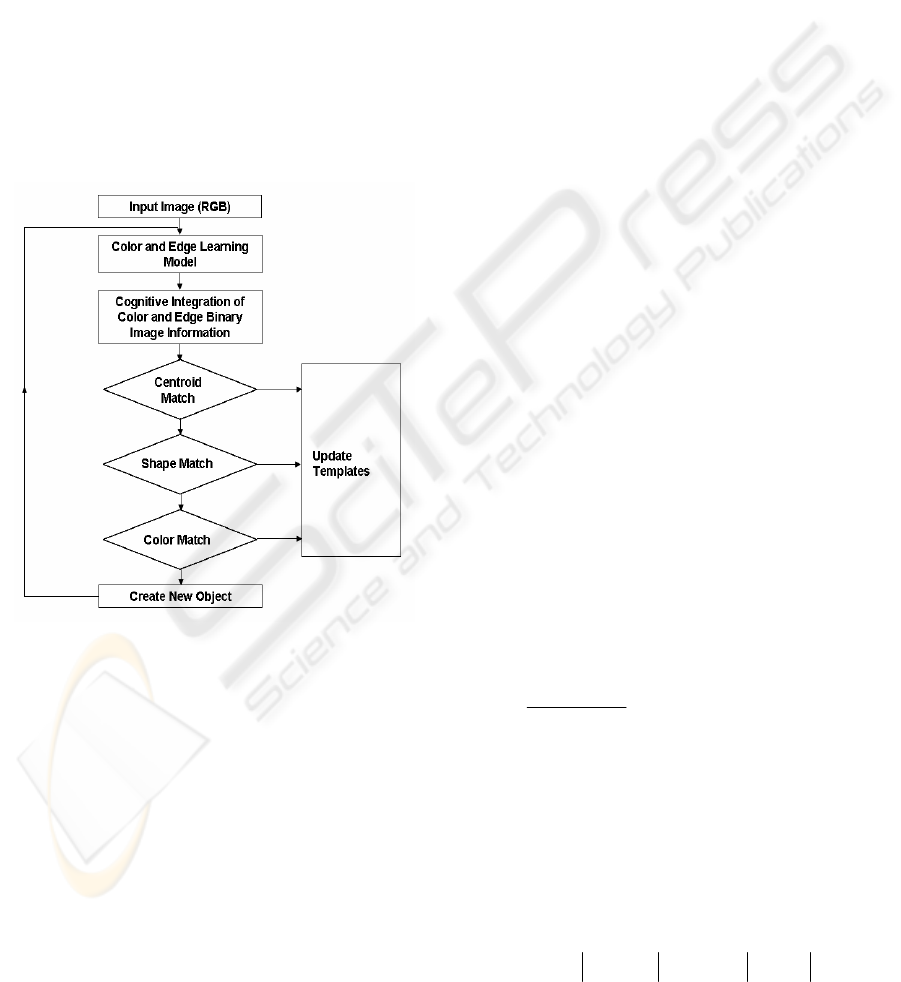
sets. Section 6 concludes the paper. Figure
1 shows
the flowchart of our system.
Figure 1: Flowchart of the System.
2 OBJECT SEGMENTATION
The first step in the surveillance of object is
separating the moving targets from the background
(BGND). We have built the background model in
two parts, color model and gradient model. Color
model is built for each color channel. It consists of
two images representing the mean and standard
deviation for each color channel. For each color
channel the mean image is computed as
(
)
1
1
−
−+=
ttt
uxu
α
α
(1)
where,
t
u is the mean computed up to frame t, α is
the learning rate of model, and
t
x
is the intensity of
the color component in frame t. The standard
deviation image
t
σ
is used to normalize the
confidence map during background subtraction and
is computed using
(
)( )
2
1
2
2
1
−
−+−=
tttt
ux
σαασ
(2)
The edge model is also composed of two mean
images and two standard deviation images. It is
computed by a horizontal and vertical Sobel edge
filter. This results in horizontal (H) and vertical
gradient image (V). The mean images are computed
as
(
)
()
1
1
1
1
−
−
−+=
−
+
=
tt
tt
VVV
HHH
ββ
β
β
(3)
where, β is the learning rate of the model. The
standard deviation images
,
H
t
σ
and
,Vt
σ
are
computed similar to the color model. The edge
model is used to identify changes in the structure of
an image. Mean image is updated continuously
using the learning parameter in the color and edge
model which allows the background model to adjust
to gradual changes in illumination. Background
subtraction is done by performing the color-based
subtraction and the edge-based subtraction
separately and then cognitive integration of the two
results.
Color-based subtraction is performed by
subtracting the current image from the mean image
in each color channel. This results in three difference
images which are used to create three normalized
confidence maps. This is done by comparing the
difference to two thresholds,
c
m
σ
and
c
M
σ
,
derived from the standard deviation images. For
each pixel, the confidence is computed as
⎪
⎪
⎩
⎪
⎪
⎨
⎧
>
≤≤×
−
−
<
=
σ
σσ
σσ
σ
σ
c
cc
cc
c
c
M
MD
MDm
mM
mD
mD
C
100
100
0
(4)
A significant change in any color channel indicates a
foreground region. A single confidence map C
C
can
be created by taking the maximum confidence at
each pixel.
Edge-based subtraction is performed by
subtracting the current horizontal difference image
from the mean image H
t
and vertical difference
image from the mean image V
t
tt
VVVHHH −=∆−=∆ ,
(5)
The edge gradient image is obtained as
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
396

VHG ∆+∆=∆
(6)
The confidence map is computed by multiplying the
∆G by a reliability factor R and comparing the
results to two thresholds
e
m
σ
and
e
M
σ
. Here, σ is
the sum of the horizontal standard deviation and the
vertical standard deviation. For each pixel, let
,
ttt
GHV G H V=+ = +
(7)
{
}
max ,
tt
GGG
∗
=
(8)
and reliability factor R computed as
∗
∆
=
t
G
G
R
(9)
The confidence for each pixel is computed as
⎪
⎪
⎩
⎪
⎪
⎨
⎧
>∆
≤∆≤×
−
−∆
<∆
=
σ
σσ
σσ
σ
σ
e
ee
ee
e
e
E
MGR
MGRm
mM
mGR
mGR
C
100
100
0
(10)
The results from the color subtraction and the
edge subtraction are combined by taking the
maximum between the two confidence maps
obtained in (4) and (10) at each pixel. The binary
image thus obtained by the fusion of color and edge
map is processed with median filter to remove salt
and pepper noise. Figures 3(a), 3(b), 3(c) and 5(a),
5(b), 5(c) shows the moving objects (foreground) in
white and background in black.
3 TRACKER STRUCTURE
We extract five types of feature in each moving
object (target), which are used for tracking. The
moving targets shown in Fig. 3, 5 are tracked. These
five features help in accurate tracking and matching
of objects in various difficult scenarios. The features
LBW, Compactness, Orientation are classified as
shape features of target. The objects have more
complex shapes and are likely to change in time
under the assumption of same segmentation method
.
3.1 Centroid
Centroid (X, Y) of a target tells us the spatial
position of the moving target. Centroid is calculated
1
Xx
A
=
∑
,
1
Yy
A
=
∑
(11)
where
(x,y) R∈
and A is the number of pixels in a
target R.
(X,Y)
are the relative velocity of the
moving target. These relative velocities are updated
at each time instance by propagating the sample set
maintained for each target track.
3.2 LBW (Length by Width)
At any time instance’t’ LBW ratio is calculated for
the moving target in their bounding region R. The
length and width of the bounding box for a target is
calculated. This ratio is maintained for individual
tracks to match them
max ( )-min ( )
max ( )-min ( )
x
txt
LBW
yt yt
⎛⎞
=
⎜⎟
⎝⎠
(12)
3.3 Compactness
Objects being tracked have complex shapes which
are maintained till an object dies.
4
,
Area
Compactness C R
Perimeter
π
×
⎧⎫
=
∈
⎨⎬
⎩⎭
(13)
where Perimeter is the sum of all boundary pixels in
region R.
3.4 Orientation
The Orientation
θ
of moving target is measured
across major axis and horizontal axis. The
θ
is
updated considering all pixel positions in both x and
y coordinates w.r.t to centroid within R
11
20 02
2
1
, = arctan
2
Orientation
µ
θ
µµ
−
⎛⎞
×
⎜⎟
⎝⎠
(14)
where
(
)( )
,
--
pq
xy
pq
x
XyY
µ
=
∑
∑
for p,q =
0,1,2.
3.5 Color
Color histogram is constructed for each moving
target by the distribution of RGB channel values. All
pixel values of an object are collected within the
bounding box R. For each pixel, the RGB values of
the object within this box R is normalized and
distributed as histogram in 4368 bins. The
probability intersection of these bins (histogram
distribution) is used for object matching. For each
pixel in region R, the bin for the distribution of its
color channel is identified using the formula
i=4368
i=0
R B×256 G×256×256
color =( )+( )+( )
16 16×16 16×16×16
(15)
SURVEILLANCE OF OUTDOOR MOVING TARGETS - Matching Targets using Five Features
397
Our tracking process involves the state vector
multi-dimensional and large; we cannot just sample
the probability density at regular intervals. Hence,
we use stochastic sampling method in the art of
condensation algorithm (Esther, koller-Meier, Frank
Ade, 2000). This factored sampling method helps in
finding an approximation to the probability density.
The state vector for any object at time‘t’ is expressed
as
( ) = [ X, Y, X,Y, , , ,Color] xt LBWC
θ
.
4 OBJECT MATCHING
In the tracking process, if a match is found then the
state vector of an object is updated by the system
model
() ( 1) ( 1)xt Axt Bwt=−+− (16)
where, w(t-1) is noise, A,B are constant matrix. The
state vector which denotes the identity of each
individual object is updated based on measurements
only if a match is found. The matching of a target at
time ‘t-1’ with a target at time ‘t’ needs to be
accurate and have to overcome situations of merge,
occlusions, failure of detection etc. So matching is
carried out at three levels using the five features of
state vector. Let the observation from a detected
target at time‘t’ be denoted as
'''' ''' '
() = [ X, Y, X,Y, , , ,Color] zt LBW C
θ
4.1 Centroid Matching
An objects position from the observation and its
update state vector position should be within the
gating region for matching to occur. The Euclidean
distance is measured and if it is within the gating
region then matching occurs.
'2 '2 '2 '2
D= (X-X ) +(Y-Y ) +(X-X ) +(Y-Y )∆ (17)
4.2 Shape Matching
We compute the distance from shape feature vector.
The features LBW, C,
θ
form shape vector. The
object (target) is said to have matched if the
difference of sum squares is less than predefined
threshold
.
'2 '2 '2
∆S= (LBW-LBW ) +(C-C ) +( - )
θ
θ
(18)
4.3 Color Matching
We compute the match through minimum
probability intersection of the histogram bins.
i=4368
'
i=1
∆C= max(color,color )
∑
(19)
The sum of minimum intersection on each bin
should be greater than a predefined value.
If an object does not match even after going
through the above matching procedures, a new
dummy target is generated for the object. This
dummy target turns into true target after lasting for
several frames. During this period, the dummy target
is supposed to be in occlusion watch state. If during
this state, the dummy target matches another
measured object then we eliminate the dummy
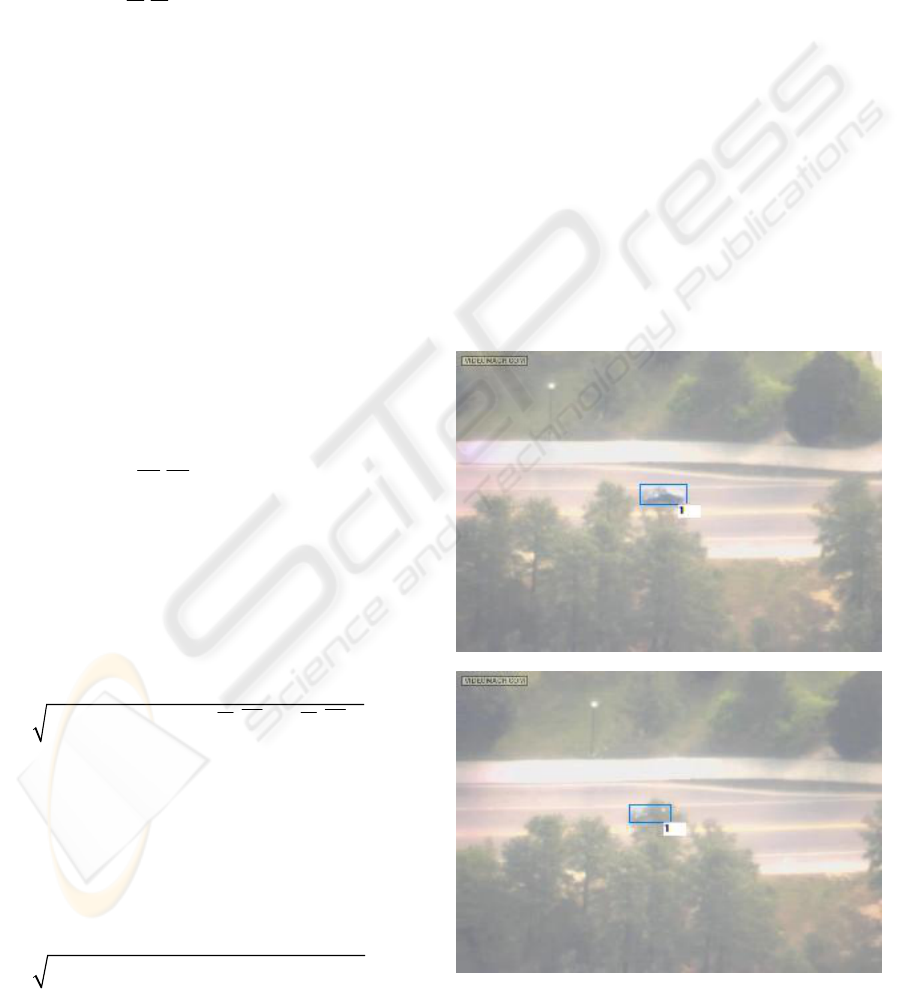
target. In Fig. 2(a) a car being identified as an object
approaches a tree. In Fig. 2(b) only very small part
of the car is visible and very major part of the car is
hidden behind the tree, so matching fails. The object
which is the car goes into occluded watch state and a
dummy target is created for it.
Figure 2(a): Car approaching the tree.
Figure 2(b): Car being occluded by the tree.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
398

Figure 2(c): Car coming from behind the tree.
Fig. 2(c) shows the car emerging from behind the
tree. The dummy target associated with the car
matches the true target. During this interim
occlusion period the dummy target gets updated only
through the centroid component by linear prediction,
using the average velocity from last three frames
.
Based on the object size, camera positions,
surveillance carried out in indoor/outdoor situations
heuristics are used regarding the weight assigned to
the above three matching. For instance if the object
is tracked at an indoor situation then color, shape are
given more weightage as objects are predominantly
humans with complex shapes and color.
5 EXPERIMENTAL RESULTS
The proposed system is used to analyze videos with
promising results. The video provided is taken in an
environment where many detection and tracking
failed because of the extreme rainy condition, low
color illumination, tree shadow effect, and tree
movements, light reflection caused on roads, vehicle
color matching with BGND, and varying object size.
Fig.3 (a), 3(b), 3(c) shows segmented output of
moving target and Fig 4(a), 4(b), 4(c) shows the
moving car tracked and assigned label 1. The car is
tracked at bizarre rainy condition with quite a lot
reflection from the road. These video frames were
taken at 111,123 and 148 respectively from the
video clip. The detection output is not missed even
for a frame under this adverse environment as
explained above. The fusion of color and edge-based
model helps in attaining correct object contour. The
noise due to tree movement is very less and it’s
further removed by using the heuristic that tree
movements are subjected to random motion. The car
is as well tracked without losing the object label in
each frame. It can also be seen that the object is
tracked till the end of the frame with the spatial
information even when the shape information is
insufficient.
In the other snowy video data frame shown, the
merging and split case among the segmented objects
is handled splendidly. Fig.5(a),5(b),5(c) shows the
segmented objects of three humans.
Fig. 6(a), 6(b),
6(c) shows the multiple objects tracked with label
assigned to them. The labels do not get interchanged
even after merge. During the merge sown in
Fig.5(b), the spatial positions of one of the two
objects being merged are not available so matching
is carried out based on shape and color. These video
frames were taken at 450,454 and 458. Track labels
are maintained for multiple objects for object
appearance/disappearance situations and even in
occlusion cases.
Although we find the results of our tracker to be
encouraging, there are still some unresolved
problems. For example incase of an object being in
occluded state for long period of time then the
predicted spatial position can lose its way and thus
enabling the failure of color and shape feature.
SURVEILLANCE OF OUTDOOR MOVING TARGETS - Matching Targets using Five Features
399
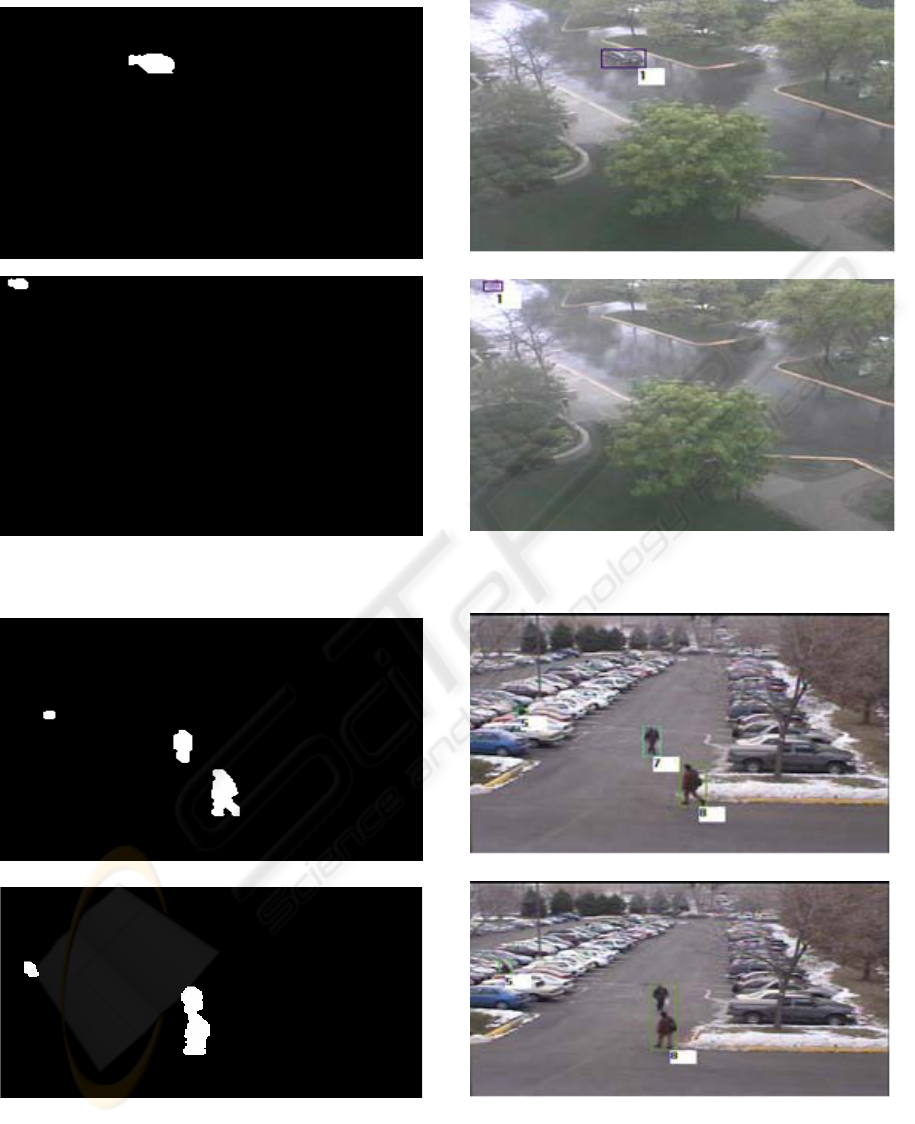
Figure 3(a), 3(b), 3(c) : Moving car target by fusion of
color and edge.
Figure 4(a), 4(b), 4(c): Car target tracked till end of the
image in rainy data.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
400

Figure 5(a), 5(b), 5(c): Multiple moving targets by fusion
of color and edge.
6 CONCLUSION
In this paper, we have presented a system for
detecting, and tracking moving objects in a
surveillance area under varying environmental
conditions. We combine edge-based and color based
background model subtraction to get complete
object contour, which enhances the tracking
performance. Spatial position, shape and color
combined together to increase the performance of
tracking even in any case of split targets or non-
availability of observed samples. Our future work is
to resolve the cases when object is totally occluded
and extreme split/merge cases of an object. Also we
would work on classifying the target as humans,
vehicles or group of people.
REFERENCES
M.Isard and A.Blake., volume29, n01,pp 5-28, 1998.
Condensation –conditional density propagation for
visual tracking, International Journal of Computer
Vision.
A.Utsumi and J.Ohya., pp 911-916, 1998. Image
Segmentation for human tracking using sequential-
image-based hierarchical adaptation, Proceedings of
IEEE computer Society Conf. on CVPR.
Tao Zhao and Ram Nevatia., pp 9–14, 2002. Stochastic
human Segmentation from a Static Camera, Motion
and Video Computing Proceedings.
Esther B. koller-Meier, Frank Ade., pp 93-105,2001.
Tracking Multiple Objects Using condensation
Algorithm, Journal of robotics and Autonomous
systems.
Figure 6(a), 6(b), 6(c) : Humans tracked . Merging of
humans handled.
Q. Zhou and J. Aggarwal., Dec 9, 2001. Tracking and
Classifying Moving Objects from Video, in Proc. 2nd
IEEE Int'l Workshop on Performance Evaluation of
Tracking in Surveillance.
I.Haritaoglu, D.Harwood and L.S Davis., vol. 22, pp 809-
830,2000. W/sup 4/:real time surveillance of people
and their activities, IEEE Trans. PAMI press.
Konstantinova Pavlina, Alexander Udvarev, Tzvetan
Semerdjiev., pp. III7-1 - III7-3, 19-20 June2003. A
Study Of A Target Tracking Algorithm Using Global
Nearest Neighbour Approach, International
Conference on Computer Systems and Technologies -
CompSysTech’2003 , Sofia, Bulgaria,
I. Cohen, G. Medioni., June 1999. Detecting and Tracking
Moving Objects in Video Surveillance,Proc. of the
IEEE CVPR 99, Fort Collins.
O. Javed, K. Shafique, and M. Shah., Dec. 2002. A
Hierarchical Approach to Robust Background
Subtraction using Color and Gradient Information,
IEEE Workshop on Motion and Video Computing,
Orlando, FL.
S. Jabri, Z. Duric, H. Wechsler, and A. Rosenfeld., 2000.
Detection and Location of People using Adaptive
Fusion of Color and Edge Information, In
Proceedings of International Conference on Pattern
Recognition.
Gonzalez and Woods., 2002. Digital Image Processing,
2
nd
edition ,Prentice Hall.
Senior A., pp 48-55,2002. Tracking People with
Probabilistic Appearance Models, PETS.
Carnegie Mellon University, visited on 06/22/2005
http://www.cs.cmu.edu/~vsam/OldVsamWeb/research
.html.
SURVEILLANCE OF OUTDOOR MOVING TARGETS - Matching Targets using Five Features
401
