
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE
FILTERS
Kai Krajsek
J. W. Goethe University, Visual Sensorics and Information Processing Lab
Robert Mayer Str.2-4, D-60054 Frankfurt am Main, Germany
Rudolf Mester
J. W. Goethe University, Visual Sensorics and Information Processing Lab
Robert Mayer Str.2-4, D-60054 Frankfurt am Main, Germany
Keywords:
steerable filter, quadrature filter, Lie group theory.
Abstract:
In this paper, a complete theory of steerable filters is presented which shows that quadrature filters are only
a special case of steerable filters. Although there has been a large number of approaches dealing with the
theory of steerable filters, none of these gives a complete theory with respect to the transformation groups
which deform the filter kernel. Michaelis and Sommer (Michaelis and Sommer, 1995) and Hel-Or and Teo
(Teo and Hel-Or, 1996; Teo and Hel-Or, 1998) were the first ones who gave a theoretical justification for
steerability based on Lie group theory. But the approach of Michaelis and Sommer considers only Abelian Lie
groups. Although the approach of Hel-Or and Teo considers all Lie groups, their method for generating the
basis functions may fail as shown in this paper. We extend these steerable approaches to arbitrary Lie groups,
like the important case of the rotation group SO(3) in three dimensions.
Quadrature filters serve for computing the local energy and local phase of a signal. Whereas for the one
dimensional case quadrature filters are theoretically well founded, this is not the case for higher dimensional
signal spaces. The monogenic signal (Felsberg and Sommer, 2001) based on the Riesz transformation has
been shown to be a rotational invariant generalization of the analytic signal. A further generalization of the
monogenic signal, the 2D rotational invariant quadrature filter (K
¨
othe, 2003), has been shown to capture richer
structures in images as the monogenic signal.
We present a generalization of the rotational invariant quadrature filter based on our steerable theory. Our
approach includes the important case of 3D rotational invariant quadrature filters but it is not limited to any
signal dimension and includes all transformation groups that own an unitary group representation.
1 INTRODUCTION
Steerable filters and quadrature filters are well estab-
lished methods in signal and image processing. Steer-
ability is at least implicitly used when computing di-
rectional derivatives as this is the central operation in
differential motion estimation. Quadrature filters are
the choice for computing the local energy and local
phase of a signal. In this paper we present a complete
theory of steerable filters and derive a group invariant
quadrature filter approach based on our steerable filter
theory.
Although a large number of approaches dealing
with the theory of steerable filters have been pub-
lished (Danielsson, 1980; Freeman and Adelson,
1991; Perona, 1995; Simoncelli et al., 1992; Simon-
celli and Farid, 1996; Michaelis and Sommer, 1995;
Teo and Hel-Or, 1996; Teo and Hel-Or, 1998; Yu
et al., 2001), none of these provides a complete and
closed theory. Such a theory shall describe the gen-
eral requirements which are necessary for a filter ker-
nel to be a steerable filter. The benefit from this work
is a deeper understanding of the concepts of steerable
filters and enables the user to construct steerable fil-
ters for every Lie group transformation. None of the
previously published approaches gives a general so-
lution of the following problem: If one is confronted
with a certain filter kernel and an arbitrary Lie group,
what are the approbate basis functions to steer the fil-
ter kernel and how are the interpolation functions to
be computed.
The steerable approach of Michaelis and Sommer
(Michaelis and Sommer, 1995) give a solution to this
problem in the case of Abelian Lie groups, whereas
the approach of Teo and Hel-Or (Teo and Hel-Or,
1996; Teo and Hel-Or, 1998) handles all Lie group
transformations. But the latter approach may fail as
we show in section 3.4. In contrast these approaches
48
Krajsek K. and Mester R. (2006).
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE FILTERS.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 48-55
DOI: 10.5220/0001377100480055
Copyright
c
SciTePress

(Michaelis and Sommer, 1995; Teo and Hel-Or, 1996;
Teo and Hel-Or, 1998) which either do not cover the
case of non-Abelian groups (Michaelis and Sommer,
1995) or do not work for all filter kernels (Teo and
Hel-Or, 1996; Teo and Hel-Or, 1998), our approach
uses the full power of Lie group theory to gener-
ate the minimum number of basis functions also for
non-Abelian compact Lie groups. It is a direct ex-
tension of the approach of (Michaelis and Sommer,
1995) in which the basis functions are generated by
the eigenfunctions of the generators of the Lie group.
In our approach a Casimir operator is used to gener-
ate the basis functions also for non-Abelian compact
Lie groups. For non-Abelian, non-compact groups,
we show that polynomials serve as appropriate basis
functions.
The quadrature filter is a well established method in
signal processing and low-level image processing for
computing the local energy and local phase of a sig-
nal. Whereas the local signal is an estimate of the lo-
cal intensity structure, the local phase provides infor-
mation about the local shape of the signal. In the 1D
case the quadrature filter is well defined by an even
part, a bandpass filter, and an odd part, the Hilbert
transformation of the bandpass filter. The filter out-
put is the analytic signal, a representation of the sig-
nal from which the local energy and local phase can
easily be computed. Large efforts have been made
to generalize the analytic signal (B
¨
ulow and Som-
mer, 2001; Granlund and Knutsson, 1995) to the 2D
case by projecting the scalar valued Hilbert transfor-
mation in the two dimensional space. The drawback
of all of these methods are that they are not rota-
tional invariant. The Riesz transformation has been
shown to be a rotational invariant generalization of
the Hilbert transformation generalizing the analytic
signal to the monogenic signal (Felsberg and Som-
mer, 2001). A further generalization of the mono-
genic signal is the 2D rotational invariant quadrature
filter (K
¨
othe, 2003), based on rotated steerable filters,
which is able to capture richer structures from an im-
age than the monogenic signal.
Many interesting computer vision and image
processing applications, like motion estimation, are
not restricted to the two dimensional case. We present
a generalization of the rotational invariant quadrature
filter (K
¨
othe, 2003) with respect to the signal dimen-
sion and the transformation group. This includes the
important case of a 3D rotational invariant quadrature
filter, but it is not limited to any signal dimension.
Also other transformations than the rotation is con-
sidered, like shearing, which is the correct transfor-
mation group when describing motion in space time.
2 STEERABLE FILTERS
Let g denote an element of an arbitrary Lie group
G and x ∈ IR
N
the coordinate vector of an N di-
mensional signal space. We define a steerable filter
h
g
(x) as the impulse response whose deformed ver-
sion, with respect to the Lie group, equals the linear
combination of a finite set of basis filters {b
j
(x)},
j =1, 2, ..., M. Furthermore, only the coefficients
{a
j
(g)}, denoted as the interpolation functions, de-
pend on the Lie group element
h
g
(x)=
M
j=1
a
j
(g) b
j
(x) . (1)
Applying the deformed filter to a signal s(x) is equiv-
alent to the linear combination of the individual im-
pulse responses of the basis filters
h
g
(x) ∗ s(x)=
M
j=1
a
j
(g)(b
j
(x) ∗ s(x)) . (2)
Questions arising with steerable functions are:
• Under which conditions can a given function h
g
(x)
be steered?
• How can the basis functions b
j
(x) be determined?
• How many basis functions are needed to steer the
function h
g
(x)?
• How can the interpolation functions a
j
(g) be deter-
mined?
In the last decade, several steerable filter approaches
have been developed trying to answer these ques-
tions, but all of them, except for the approach of Teo
and Hel-Or (Teo and Hel-Or, 1996; Teo and Hel-Or,
1998), tackle only a special case, either for the filter
kernel or for the corresponding transformation group.
3 AN EXTENDED STEERABLE
APPROACH BASED ON LIE
GROUP THEORY
In the following section, we present our steerable fil-
ter approach based on Lie group theory covering all
recent approaches developed so far. It delivers for
Abelian Lie groups and for compact non-Abelian Lie
groups the minimum required number of basis func-
tions and the corresponding interpolation functions.
In order to complete the steerable approach the case of
non-Abelian, non-compact Lie groups has to be con-
sidered separately. After presenting our concept, its
relation to recent approaches is discussed and some
examples are presented.
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE FILTERS
49

3.1 Conditions for Steerability
In the following we show the steerability of all fil-
ter kernels h :IR
N
→ IC which are expand-
able according to a finite number M of basis func-
tion B = {b
j
(x)} of a subspace V :=span{B} ⊂ L
2
of all quadratic integrable functions. Since every el-
ement of L
2
can arbitrary exactly be approximated
by a finite number of basis functions, we consider, at
least approximately, all quadratic integrable filter ker-
nels. The problem of approximating such a function
by a smaller number of basis functions when allowing
a certain error has been examined in (Perona, 1995)
and is not topic of this paper. With the notation of the
inner product ·, · in L
2
and the Fourier coefficients
c
j
= h(x),b
j
(x) the expansion of h(x) reads
h(x)=
M
j=1
c
j
b
j
(x) . (3)
Furthermore, every basis function b
j
(x) ∈ V shall
belong to an invariant subspace U ⊆ V with respect
to a Lie group G transformation.
Then, h(x) is steerable with respect to G.
We have assigned the preconditions such that this
statement can be easily verified. Let D(g) denote the
representation of g ∈Gin the function space V and
D(g) the representation of G in the N-dimensional
signal space. It is easy to verify that the transformed
function D(g)h(x) equals the linear combination of
the transformed basis functions
D(g)h (x)=h
D(g)
−1
x
(4)
=
M
j=1
c
j
b
j
(D(g)
−1
x) (5)
=
M
j=1
c
j
D(g)b
j
(x) . (6)
Since every basis function b
j
(x) is, per definition,
part of an invariant subspace, the transformed version
D(g)b
j
(x) can be expressed by a linear combination
of the subspace basis. Let denote m(j) the mapping
of the index j of the basis function b
j
(x) onto the
lowest index of the basis function belonging to the
same subspace and d(j) the mapping of the index of
the basis function b
j
(x) onto the dimension d
j
of its
invariant subspace. The transformed basis function
D(g)b
j
(x) can be expressed, with the previous def-
inition of m(j) and d(j), and the coefficients of the
linear combination w
jk
(g) as
D(g)b
j
(x)=
m(j)+d(j)−1
k=m(j)
w
jk
(g)b
k
(x) . (7)
Inserting equation (7) into equation (6) yields
D(g)h(x)=
M
i=1
c
i
m(j)+d(j)−1
k=m(j)
w
jk
(g)b
k
(x) . (8)
The double sum can be written such that all co-
efficients belonging to the same basis function are
grouped together, where L denotes the number of in-
variant subspaces in V
D(g)h(x)=
b
k
∈U
1
b
k
(x)
w
jk
∈U
1
c
j
w
jk
(g) (9)
+
b
k
∈U
2
b
k
(x)
w
jk
∈U
2
c
j
w
jk
(g)+...
+
b
k
∈U
L
b
k
(x)
w
jk
∈U
L
c
j
w
jk
(g) .
Thus, in order to steer the function h we have to con-
sider all basis functions spanning the L subspaces.
3.2 The Basis Functions
The next question arising is how to obtain the appro-
priate basis functions. We require the basis functions
to span finite dimensional invariant subspaces. Fur-
thermore, the invariant subspaces are desired to be
as small as possible in order to lower computational
costs. Group theory provides the solution of this prob-
lem and the functions fulfilling these requirements
are, per definition, the basis of an irreducible repre-
sentation of the Lie group. This has already pointed
out by Michaelis and Sommer (Michaelis and Som-
mer, 1995) and a method for generating such a basis
for Abelian Lie groups has been proposed. We ex-
tend this method for the case of non-Abelian, compact
Lie groups. The case of non-Abelian, non-compact
groups is discussed in subsection 3.2.2.
3.2.1 Basis Functions for Compact Lie Groups
The invariant space spanned by an irreducible ba-
sis cannot be decomposed further into invariant sub-
spaces and thus, forming a minimum number of ba-
sis functions for the steerable function. Michaelis
and Sommer showed that such a basis is given by the
eigenfunctions of the generators in case of Abelian
Lie groups. Since the generators of a non-Abelian
groups do not commutate and thus have no simultane-
ous eigenfunctions, the method does not work in this
case any more. But their framework can be extended
with a slight change to compact non-Abelian groups.
Instead of constructing the basis functions from the
simultaneous eigenfunctions of the generators of the
group, the basis function can also be constructed by
the eigenfunctions of a Casimir operator C of the cor-
responding Lie group. In order to define the Casimir
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
50

operator we first have to introduce the Lie bracket, or
commutator, of two operators
[D(a), D(b)] = D(a)D(b) −D(b)D(a) . (10)
Operators commutating with all representations of the
group elements are denoted as Casimir operators
[C, D(g)] = 0 ∀g ∈G . (11)
Let {b
m
(x)},m =1, ..., d
α
denote the set of eigen-
functions of C corresponding to the same eigenvalue
α. Then, every transformed basis function D(g)b
i
(x)
is an eigenfunction with the same eigenvalue α
CD(g)b
i
(x)=D(g)Cb
i
(x) (12)
= D(g)αb
i
(x)
= αD(g)b
i
(x) .
Thus, {b
m
(x)} forms a basis of a d
α
dimensional in-
variant subspace U
α
. Any transformed element of this
subspace can be expressed by a linear combination of
basis functions of this subspace
D(u)b
m
(x)=
d
α
j=1
w
mj
b
j
(x) . (13)
Thus, we have found a method for constructing in-
variant subspaces also for non-Abelian groups. A
Casimir operator is constructed by a linear combina-
tion of products of generators of the corresponding
Lie group where n denotes the number of generators
C =
ij
f
ij
L
i
L
j
,i,j=1, ..., n . (14)
The coefficients f
ij
are solved by the constraints
[C, L
k
]=0,k=1, ..., n . (15)
If the Casimir operator of a compact group is self-
adjoint with a discrete spectrum, the eigenfunctions
constitute a complete orthogonal basis of the corre-
sponding function space. It is a well known fact from
functional analysis that in this case all eigenfunctions
belonging to the same eigenvalue span a finite dimen-
sional subspace. If furthermore the considered group
the Casimir operator has the symmetry of the group G,
i.e. there exists no operation which does not belong
to the group and under which the Casimir operator
is invariant, then the eigenfunctions are basis func-
tions of irreducible representation (Wigner, 1959).
After computing one eigenfunction b
1
(x) correspond-
ing to the eigenvalue α we can construct all other
basis functions of this invariant subspace by apply-
ing all possible combinations of generators of the Lie
group to b
1
(x). The sequence of generators is stopped
when the resulting function is linear dependent from
the ones which have already been constructed. This
equals to the method for constructing the basis func-
tions proposed by Teo and Hel-Or (Teo and Hel-Or,
1998) except for the fact that they propose to apply
this procedure directly to the steerable function h(x).
3.2.2 Basis Function for Non-Compact Lie
Groups
Since only Abelian Lie groups and compact non-
Abelian Lie groups are proofed to own complete irre-
ducible representations, i.e. the representation space
falls into invariant subspaces, we have to treat the
case of non-Abelian, non-compact groups separately.
Since we do only require an invariant subspace and
not an entirely irreducible representation we can eas-
ily construct such a space from a polynomial basis
of the space of square integrable functions. The or-
der of a polynomial term does not change by an arbi-
trary Lie group transformation and thus the basis of a
polynomial term constitute a basis for a steerable fil-
ter. In order to steer an arbitrary polynomial we have
to determine the terms of different order. The sum
of the basis functions of the corresponding invariant
subspaces are a basis for the steerable polynomial.
We can now construct for every Lie group transfor-
mation the corresponding basis for a steerable filter.
For Abelian groups and compact groups we chose the
basis from the eigenfunction of the Casimir operator
whereas for all other groups we choose a polynomial
basis. The next section addresses the question how
to combine these basis functions in order to steer the
resulting filter kernel with respect to any Lie group
transformation.
3.3 The Interpolation Functions
The computation of the interpolation functions
{a
j
(g)} can already be deduced from equ.(9). In or-
der to obtain the interpolation function corresponding
to the basis function b
m
(x) the transformed version
of the original filter kernel h(x) has to be projected
onto b
m
(x)
a
m
(g)=D(g)h(x),b
m
(x) (16)
=
D(g)
M
n=1
c
n
b
n
(x),b
m
(x)
=
M
n=1
c
n
D(g)b
n
(x),b
m
(x) .
The relation between {c
k
}
M
1
and {a
k
}
L
1
is a linear
map P ∈ IR
M×L
with the matrix elements
(P)
ij
= D(g)b
i
(x),b
j
(x) (17)
of the coefficient vector
c := (c
1
,c
2
, ..., c
M
) (18)
onto the interpolation function vector
a(g):=(a
1
(g),a
2
(g), ..., a
N
(g)) . (19)
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE FILTERS
51

As already pointed out by Michaelis and Sommer
(Michaelis and Sommer, 1995), the basis functions
have not to be the transformed versions of the filter
kernel as assumed in other approaches (Freeman and
Adelson, 1991; Simoncelli and Farid, 1996). It is suf-
ficient that the synthesized function is steerable. If it
is nonetheless desired to design basis functions which
are transformed versions h
g
(x):=D(g)h(x) of the
filter kernel h(x) a basis change is sufficient
h(x)=
M
j=1
a
j
(g)b
j
(x)=
M
j=1
˜a
j
h
g
j
(x) . (20)
The relation between {a
j
(g)} and {˜a
j
(g)} can be
found by a projection of both sides of equation (20)
on b
m
(x)
a
m
(g)=
M
j=1
a
j
(g)h
g
j
(x),b
m
(x)
(21)
=
M
j=1
˜a
j
(g)
h
g
j
(x),b
m
(x)
B
jm
.
This can be written as a matrix/vector operation with
˜
a
T
:= (˜a
1
, ˜a
2
,...,˜a
n
) and a
T
:= (a
1
,a
2
,...,a
n
)
a = B
˜
a . (22)
The matrix B describing the basis change is invertible
˜
a = B
−1
a (23)
and the steerable basis can be designed as steered ver-
sions of the original filter kernel.
3.4 Relation to Recent Approaches
We present a steerable filter approach for comput-
ing the basis functions and interpolation functions for
arbitrary Lie groups. Since two steerable filter ap-
proaches based on Lie group theory (Michaelis and
Sommer, 1995; Teo and Hel-Or, 1996; Teo and Hel-
Or, 1998) have already been developed, the purpose
of this section is to examine their relation to our ap-
proach.
Freeman and Adelson (Freeman and Adelson,
1991) consider steerable filters with respect to the
rotation group in 2D and 3D, respectively. For the
2D case they propose a Fourier basis (of the function
space) times a rotational invariant function as well as
a polynomial basis (of the function space) times a ro-
tational invariant function as basis functions of the
steerable filter. They realized that the minimum re-
quired set of basis functions depend on the kind of ba-
sis itself but their approach failed to explain the reason
for it. Michaelis and Sommer (Michaelis and Som-
mer, 1995) answer this question based on Lie group
theory: the basis of an irreducible group represen-
tation span an invariant subspace of minimum size.
Since the Fourier basis is the basis for an irreducible
representation of the rotation group SO(2), the re-
quired number of basis function is less as for the poly-
nomial basis. Our approach can be considered as an
extension of the approach of Michaelis and Sommer
from Abelian Lie groups to arbitrary Lie group trans-
formation. Whereas the approach of Michaelis and
Sommer construct the basis function from the gener-
ators of the group, our approach uses a Casimir op-
erator. Since the generators of an Abelian Lie group
commutate with each other, their linear combination
constitute a Casimir operator and thus both meth-
ods become equal in this case. But our method also
works for the case of general compact groups, since
in this case, a self-adjoint Casimir operator with a
discrete spectrum delivers finite dimensional invari-
ant subspaces. For non-compact, non-Abelian groups
we showed that polynomials serve always as basis for
an invariant subspace. The approach of Teo and Hel-
Or significantly differs from our approach in the way
how the invariant subspaces are generated. The basis
functions of the invariant subspace are constructed by
applying all combinations of Lie group generators to
the function that is to be made steerable. A certain
sequence of generators, denoted as generator chain
in case of Abelian Lie groups and generator trees in
the case of non-Abelian Lie groups, is stopped if the
resulting function is linearly dependent to the basis
functions which have already been constructed. In the
following, we will show that this approach may fail.
Let us consider the function h(x, y) = exp(−x
2
)
and the rotation in 2D as the group transforma-
tion. Applying the generator chain which is sim-
ply the successive application of the group generator
L = x
∂
∂y
− y
∂
∂x
does not converge since h(x, y) is
not expandable by a finite number of basis functions
of a representation of the rotation group. In our ap-
proach, h(x, y) is first approximated by a finite num-
ber of basis functions each belonging to a finite di-
mensional invariant subspace. Such a filter is always
steerable by construction.
4 GROUP INVARIANT
QUADRATURE FILTERS
Quadrature filters have become an appropriate tool for
computing the local phase and local energy of one di-
mensional signals. They are obtained by a bandpass
filter and its Hilbert transformation. The bandpass fil-
ter is applied to reduce the original signal to a signal
with small bandwidth which is necessary to obtain
a reasonable interpretation of the local phase. The
Hilbert transformation is applied to shift the phase
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
52
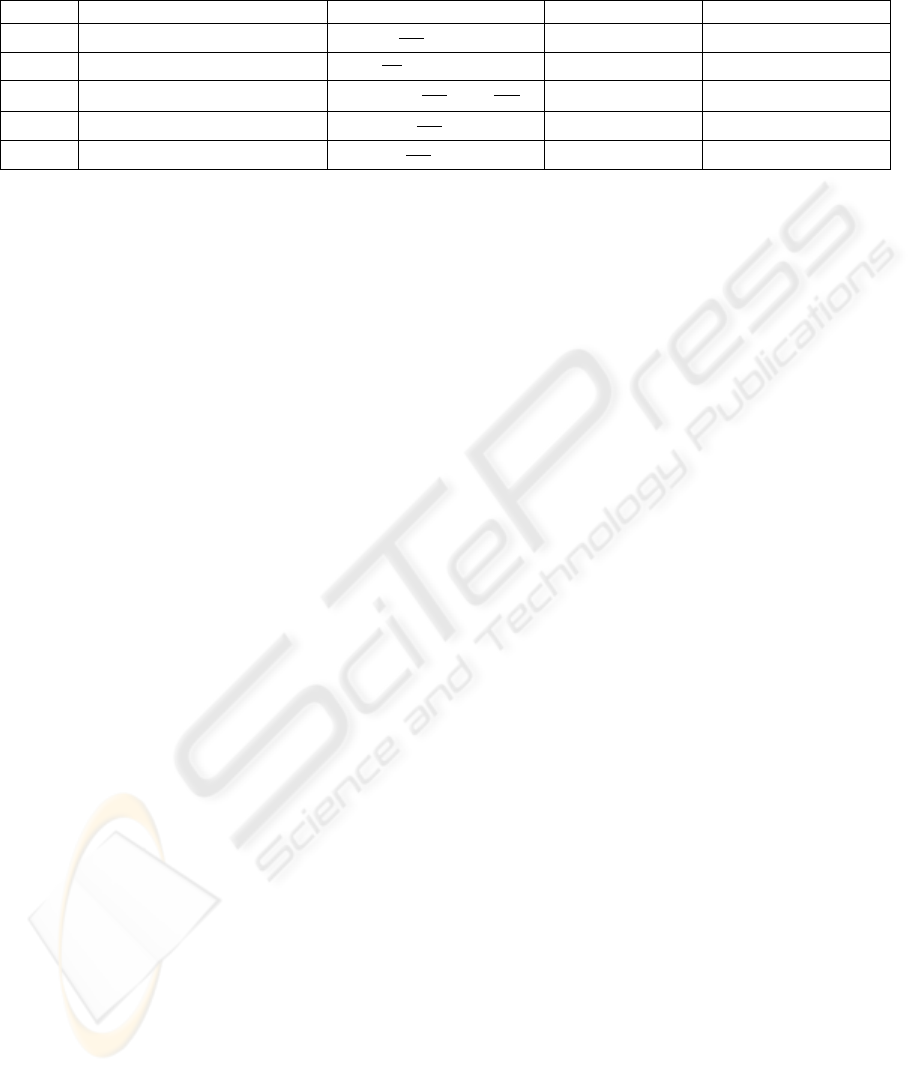
Table3.1: Several examples of Lie groups, the corresponding operator(s), generator(s), Casimir operator(s) and basis func-
tions. Terminology: T
N
: translation group in the N-dimensional Signal space; SO(N): special orthogonal group; U
N
:
uniform scaling group; S
N
: shear group.
Group Operators Generators Casimir operator basis functions
T
N
D(a)h(x)=h(x − a) {L
i
=
∂
∂x
i
} C =
N
i=1
L
2
i
exp
jn
T
x
SO(2) D(α)h(r, ϕ)=h(r, ϕ − α) L =
∂
∂ϕ
C = L
2
{f
k
(r)exp(jkϕ)}
SO(3) Rh(x)=h(R
−1
x) {L
k
= x
j
∂
∂x
i
− x
i
∂
∂x
j
} C =
3
i=1
L
2
i
{f
k
(r)Y
m
(θ, ϕ) }
U
N
D(α)h(x)=h(e
−α
x) {L
i
= x
i
∂
∂x
i
} C =
N
i=1
L
2
i
{r
k
}
S
N
D(u)h(x,t)=h(x − ut, t) {L
i
= t
∂
∂x
i
} C =
N
i=1
L
2
i
{f
k
(t)exp(jkx/t)}
of the original signal by ninety degrees such that the
squared sum of the output of the bandpass and its
Hilbert transformation results in a phase invariant lo-
cal energy. In order to apply this concept to image
processing, large efforts have been made to general-
ize the Hilbert transform to 2D dimensional signals
(B
¨
ulow and Sommer, 2001; Granlund and Knutsson,
1995). All of these approaches fail to be rotational in-
variant, but rotational invariance is an essential prop-
erty of all feature detection methods. An appropri-
ate 2D generalization of the analytic signal is the
monogenic signal which is based on the vector-valued
Riesz transformation (Felsberg and Sommer, 2001).
The Riesz transformation is valid for all dimensions
and reduces to the Hilbert transformation in the one
dimensional case. A further generalization of 2D ro-
tational invariant quadrature filters can be done by
steerable filters which behave under certain condi-
tions like quadrature filter pairs (K
¨
othe, 2003). The
monogenic signal is included in this approach. We
will go a step further, using the theory of Lie groups
and the steerable filter approach presented in the last
section to develop a generalization of the rotational
invariant quadrature filters to quadrature filters which
are invariant to compact or Abelian Lie groups and is
also valid for arbitrary signal dimensions. In particu-
lar, we are able to design rotational invariant quadra-
ture filters in 3D. But also feature detection methods
that are invariant with respect to other transformation
groups are important as in the case of motion estima-
tion. The signal in the space time volume is sheared
and not steered by motion and thus filters for detect-
ing this signal shall be designed invariant with respect
to the shear transformation.
4.1 Properties of a General
Quadrature Filter
We will first recall the main properties of a quadrature
filter. The main idea of a quadrature filter is to apply
two filters to a signal such that the sum of the square
filter responses reflect the local energy of the signal.
Also the local phase of the selected frequency band
shall be determined by the two filter outputs. Further-
more, the local energy shall be group invariant, i.e.
the filter outputs shall be invariant with respect to the
deformation of the signal by the corresponding group.
In order to achieve group invariance, we construct our
quadrature filter from the basis of an unitary group
representation. Groups with an unitary representa-
tion are compact groups and Abelian groups (Wigner,
1959). The even h
e
and odd h
o
components of the
quadrature filter are constructed by a vector valued
impulse response consisting of the basis functions of
an unitary representation of dimension m
e
and m
o
,
respectively.
h
e
=
⎛
⎜
⎜
⎝
h
e1
(x)
h
e2
(x)
.
.
.
h
em
e
(x)
⎞
⎟
⎟
⎠
, h
o
=
⎛
⎜
⎜
⎝
h
o1
(x)
h
o2
(x)
.
.
.
h
om
o
(x)
⎞
⎟
⎟
⎠
. (24)
In the following we show that all basis functions of
an invariant subspace generated by a Casimir opera-
tor which is point symmetric, i.e. commutates with
the mirror group that acts on the coordinate vector
like Px →−x, own the same parity. Since the parity
operator commutates with the Casimir operator, there
exists simultaneous eigenfunctions. Applying P two
times equals the identity operator and thus the eigen-
values of P are λ = ±1. Thus every basis function
has a certain parity, i.e. is either point symmetric or
point anti-symmetric
Pb
j
(x)=±b
j
(x) . (25)
Let us consider one basis function b
1
(x) with positive
parity, i.e. Pb
1
(x)=b
1
(x). All other basis func-
tions of the same subspace can be generated by linear
combinations of generators of G , where k
i
j
denote the
coefficients of the linear combination and n the num-
ber of generators of G
n
j=1
k
i
j
L
j
b
1
(x)=b
i
(x),i=1, 2, ..., m
e
. (26)
Applying the parity operator on both sides of equ.(26)
and considering that P commutates with all genera-
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE FILTERS
53

tors yields
P
n
j=1
k
i
j
L
j
b
1
(x)=Pb
i
(x) (27)
⇔
n
j=1
k
i
j
L
j
b
1
(x)=Pb
i
(x)
⇒ Pb
i
(x)=b
i
(x) ∀i.
If we assume Pb
1
(x)=−b
1
(x) we obtain with the
same deduction Pb
i
(x)=−b
i
(x) for all basis func-
tions of this subspace. Thus, all basis functions be-
longing to the same subspace attain the same par-
ity. The filter responses of h
e
and h
o
are denoted
as the filter channels c
e
= s(x) ∗ h
e
(x) and
c
o
= s(x) ∗ h
o
(x), respectively. The square of
the filter response of each channel are denoted as even
and odd energies. Due to the unitary representation,
both energies are invariant under the corresponding
group action
E
s
=(D(g)c
s
)
T
(D(g)c
s
)=c
T
s
c
s
s ∈{e, o} .
Note that the inner product is taken with respect to
the invariant subspace, not with respect to the func-
tion space. The local energy of the signal is given by
the sum of the even and odd energy. In the follow-
ing we will examine the properties of the filter chan-
nels required to achieve a phase invariant local energy
when applied to bandpass signals. In the ideal case, a
simple
1
bandpass filtered signal consists of only one
wave vector k
0
and its Fourier transform
2
reads with
the Dirac delta distribution δ(k)
S(k)=S
0
δ(k − k
0
)+S
0
δ(k + k
0
) . (28)
We start with examining the Fourier transform of the
even and odd energies
E
s
= c
T
s
c
s
=
m
s
j=1
(s(x) ∗ h
sj
(x))
2
. (29)
Applying the convolution theorem to E
s
reads
F{E
s
}(k)=
m
s
j=1
(S(k)H
sj
(k)) ∗ (S(k)H
sj
(k)) .
Inserting the signal (28) in the equation above, com-
puting the convolution and performing the inverse
1
simple signal: signal with intrinsic dimensionality one.
2
Note that the Fourier transformed entities are labeled
with capital letters.
Fourier transformation reads
E
s
(x)=S
2
0
m
s
i=1
(H
si
(k
0
))
2
e
4πjk
T
0
x
(30)
+ S
2
0
m
s
i=1
(H
si
(−k
0
))
2
e
−4πjk
T
0
x
+ S
2
0
m
s
i=1
H
si
(k
0
)H
si
(−k
0
)
+ S
2
0
m
s
i=1
H
si
(−k
0
)H
si
(k
0
) .
Note that the first two terms are phase variant whereas
the last two ones are not. In order to achieve phase in-
variant local energy, the first two terms have to cancel
when adding the even and odd energy. This is exactly
the case when all basis functions of one invariant sub-
space are either even or odd and the sum of squared
Fourier transformed filter components are equal
m
e
i=1
|H
ei
(k
0
)|
2
=
m
o
k=1
|H
ok
(k
0
)|
2
. (31)
All basis functions of one invariant subspace are ei-
ther even (= their Fourier transforms are real and
even), or odd (= their Fourier transforms are imagi-
nary and odd). Thus, the Fourier transformed filter
components become
m
e
i=1
H
ei
(±k
0
)
2
=
m
e
i=1
|H
ei
(k
0
)|
2
(32)
in the even case and
m
o
i=1
H
oi
(±k
0
)
2
= −
m
o
i=1
|H
oi
(k
0
)|
2
(33)
in the odd case. Since the inner product of the Fourier
transform of both filter channels are equal, the first
two terms cancel out resulting in a phase invariant lo-
cal energy
E =2S
2
0
⎛
⎝
s
j=1
|H
nj
(k
0
)|
2
+
d
k=1
|H
mk
(k
0
)|
2
⎞
⎠
.
The local phase φ of an intrinsic one dimensional sig-
nal is given by
tan(φ)=
m
o
i=1
(h
oi
(x) ∗ s(x))
2
1
2
m
e
i=1
(h
ei
(x) ∗ s(x))
2
1
2
. (34)
In the next section an example of an group invariant
quadrature filter is presented.
VISAPP 2006 - IMAGE FORMATION AND PROCESSING
54

4.2 An Example: 3D Rotational
Invariant Quadrature Filters
We now apply the approach presented in the last sec-
tion to the 3D rotational invariant quadrature filter.
The even h
e
and odd h
o
vector valued impulse re-
sponses have to be the basis functions of an unitary
representation of the rotation group SO(3). A possi-
ble basis of an unitary invariant subspaces are the well
known spherical harmonics times an arbitrary radial
function f
n
(|x|) ∈ L
2
b
nm
(x)=f
n
(|x|)Y
m
(
ˆ
x) . (35)
The spherical harmonics are either even or odd, thus
the even vector valued impulse responses can be con-
structed from all spherical harmonics of even or-
der, the odd vector valued impulse response from
all spherical harmonics of odd order. According to
equ.(31), we have to show that the scalar product
of the Fourier transformed vector valued impulse re-
sponses are equal. It is well known that a radial func-
tions times a spherical harmonic is also spherical sep-
arable in the Fourier domain and vise versa. If we
require, like in the 2D case (K
¨
othe, 2003), the radial
function F
nm
(|k
0
|)=F (|k
0
|) in the Fourier domain
to be the same for all transfer functions, the constraint
equ.(31) becomes
odd
m=−
|Y
m
(
ˆ
k
0
)|
2
=
even
m=−
|Y
m
(
ˆ
k
0
)|
2
. (36)
Since the scalar product of the even as well as the odd
spherical harmonics are rotational invariant the right
and the left hand side of equ.(36) is constant. There-
fore, the constraint equation can be always be fulfilled
by an appropriate scaling of the spherical harmonics.
5 CONCLUSION
We have presented a theory for steerable filters and
quadrature filters based on Lie group theory. Both
approaches are most general with respect to the
signal dimension as well as with respect to the trans-
formation Lie group. For the steerable filter case, we
provide for every quadratic integrable function (at
least approximately) the method for constructing the
basis functions for every Lie group transformation.
For compact and Abelian groups we even showed
that this is the minimum required number of basis
functions. Furthermore, we generalized the 2D
rotational invariant quadrature filter approach with
respect to arbitrary dimension of the signal space and
to Lie group transformation which own an unitary
representation. It turned out that the group invariant
quadrature filter is a special steerable filter. The
future work will be the integration of the general
quadrature filter approach into a tensor representation
and its application to motion and orientation estima-
tion in 3D.
This work was supported by DFG ME 1796/5 - 3
and DAAD 313-PPP-SE/05-lk.
REFERENCES
B
¨
ulow, T. and Sommer, G. (2001). Hypercomplex sig-
nals - a novel extension of the analytic signal to the
multidimensional case. IEEE Transactions on Signal
Processing, 49(11):2844–2852.
Danielsson, P. E. (1980). Rotation-invariant linear operators
with directional response. In Proc. Int. Conf. Pattern
Recognition, Miami, FL.
Felsberg, M. and Sommer, G. (2001). The monogenic
signal. IEEE Transactions on Signal Processing,
49(12):3136–3144.
Freeman, W. and Adelson, E. (1991). The design and use of
steerable filters. IEEE Transactions on Pattern Analy-
sis and Machine Intelligence, 13(9):891–906.
Granlund, G. H. and Knutsson, H. (1995). Signal process-
ing for computer vision. Kluwer.
K
¨
othe, U. (2003). Integrated edge and junction detec-
tion with the boundary tensor. In Proc. of 9th Inter-
national Conference on Computer Vision, volume 1,
pages 424–431, Nice, France.
Michaelis, M. and Sommer, G. (1995). A Lie group ap-
proach to steerable filters. Pattern Recognition Let-
ters, 16:1165–1174.
Perona, P. (1995). Deformable kernels for early vision.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 17(5):488–499.
Simoncelli, E. and Farid, H. (1996). Steerable wedge filters
for local orientation analysis. IEEE Transactions on
Image Processing, 5(9):1377–1382.
Simoncelli, E. P., Freeman, W. T., Adelson, E. H., and
Heeger, D. J. (1992). Shiftable multiscale trans-
forms. IEEE Transactions on Information Theory,
38(2):587–607.
Teo, P. and Hel-Or, Y. (1996). A common framework
for steerability, motion estimation and invariant fea-
ture detection. Technical Report STAN-CS-TN-96-
28, Stanford University.
Teo, P. and Hel-Or, Y. (1998). Lie generators for comput-
ing steerable functions. Pattern Recognition Letters,
19(1):7–17.
Wigner, E. (1959). Group Theory and its Application to
Quantum Mechanics of Atomic Spectra. Academic
Press, New York.
Yu, W., Daniilidis, K., and Sommer, G. (2001). Ap-
proximate orientation steerability based on angular
gaussians. IEEE Transactions on Image Processing,
10(2):193–205.
AN UNIFIED THEORY FOR STEERABLE AND QUADRATURE FILTERS
55
