
EU PROJECT RESOLUTION
Reconfigurable Systems for Mobile Local Communication and Positioning
Frank Ellinger*, Jörg Carls*, Silvan Wehrli, Heinz Jäckel, Christian Kromer
Electronics Laboratory, Swiss Federal Institute of Technology (ETH) Zürich, Switzerland
*Will be with the Chair for Circuit Design and Network Theory, Dresden University of Technology,
Helmholzstrasse 10, Dresden, Germany,
Leif Wiebking, Alexander Dabek, Jörg Hüttner, Richard Roskosch, Roland Gierlich,
Claus Seisenberger
Power & Sensor Systems, Siemens, Munich, Germany
Mario Huemer, Ralf Mosshammer, Thomas Uβmüller, Robert Weigel
Institute of Electronics Engineering, Friedrich Alexander University of Erlangen-Nuremburg, Erlangen, Germany
Viswanathan Subramanian, Marko Krcmar, Georg Böck
Microwave Engineering Group, Technical University of Berlin, Germany
Demosthenes Doumenis, Anastasis Kounoudes
SignalGeneriX Ltd, Limassol, Cyprus
Krzysztof Kurek, Yevhen Yashchyshyn, Rafal Szumny
Warsaw University of Technology, Poland
Antonis Kalis
Research and Education Society in Information Technologies, Athens, Greece
Elena Avatagelou, Anastasia Garbi
Exodus, Athens, Greece
Solon Spiegel
RIO Systems, Tel Aviv, Israel
Keywords: Local positioning, FMCW radar, RF, WLAN, integrated circuits, CMOS, BiCMOS.
Abstract: This conference paper gives a brief overview of the EU project RESOLUTION started in Feb. 2006. The
goal is the development of a wireless three-dimensional (3-D) local positioning system with measurement
accuracy in the centimeter regime. A novel frequency modulated continuous wave (FMCW) radar principle
with active sensors is employed. This advanced local position radar will be co-designed together with
common WLAN systems operating around 5 GHz. Because of the high positioning accuracy, real-time
ability, and robustness against multipath effects and fading, novel applications will be feasible including
smart factories, robotics, interactive guiding, object tracking and augmented reality.
1 INTRODUCTION
Since more than 50 years, radar based on the
transmission and detection of RF waves is employed
to locate plains, ships and submarines (James, 1989).
Today, positioning services have been expanded and
enhanced for guiding of cars and pedestrians,
interactive maps, automated factories, robotics,
augmented reality, etc. The following positioning
methods are commonly used:
362
Ellinger F., Carls J., Wehrli S., Jäckel H., Kromer C., Wiebking L., Dabek A., Hüttner J., Roskosch R., Gierlich R., Seisenberger C., Huemer M.,
Mosshammer R., Ußmüller T., Weigel R., Subramanian V., Krcmar M., Böck G., Doumenis D., Kounoudes A., Kurek K., Yashchyshyn Y., Szumny R.,
Kalis A., Avatagelou E., Garbi A. and Spiegel S. (2006).
EU PROJECT RESOLUTION - Reconfigurable Systems for Mobile Local Communication and Positioning.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 362-367
DOI: 10.5220/0002094203620367
Copyright
c
SciTePress
• GPS (Global Positioning System) based on
trilateralisation methods associated with satellites
acting as reference transmitters.
• Cell-ID (Identification): position is estimated by
means of the closest basestation.
• RSS (Received Signal Strength): distance d
between reference transmitter and object is
determined by the propagation loss being
proportional to
1
n
d
with n as channel-specific
parameter.
• TOA (Time of Arrival): with given signal
velocity c, d is measured with respect to the time
difference
Δ
t between transmitted and reflected
signal:
1
dct
2
Δ
=⋅⋅ . (1)
• AOA (Angle of Arrival) by means of goniometry
considering the angles of the signals.
Detailed information about positioning principles
can be found in [Vos03, Sko90, Ell06].
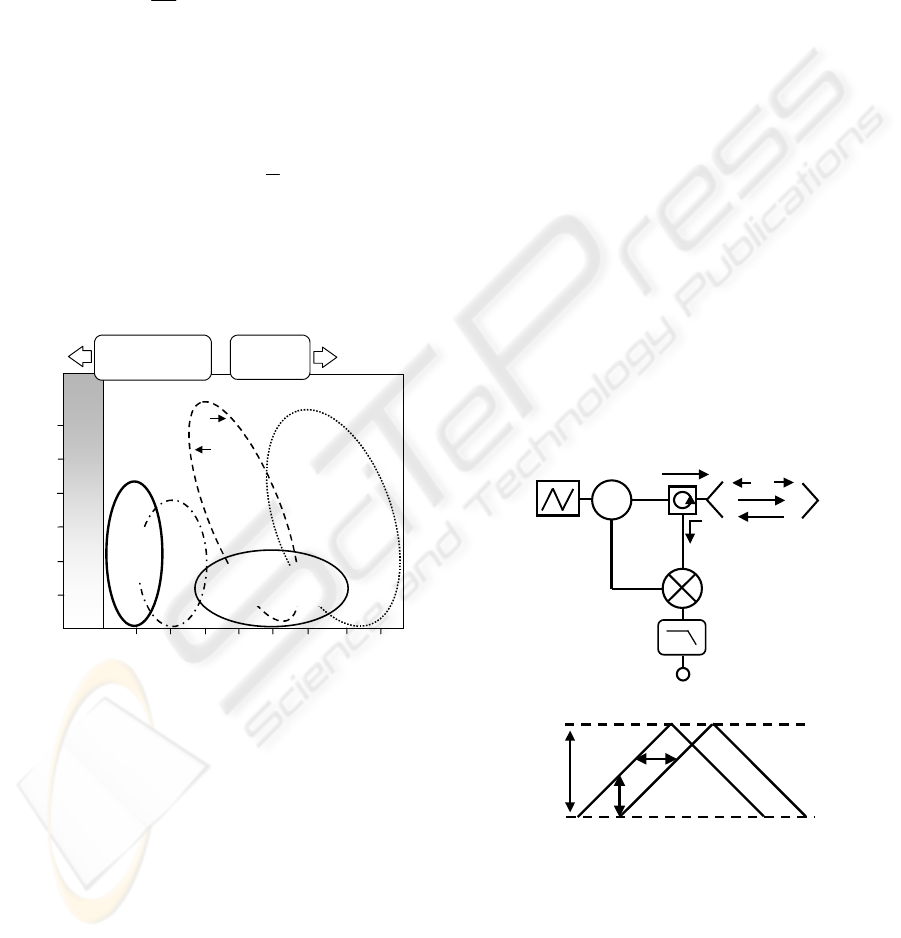
Figure 1: Positioning accuracy and coverage range of
systems merging mobile communication and positioning,
AOA: angle of arrival, HPLS: high precision localization
system based on FMCW.
There is the trend to combine radio-location and
mobile communications yielding enhanced and
novel services. Examples of such systems are:
• GPS and GSM/3G
• Cell-ID and GSM/3G
• RSS and WLAN
• TOA/AOA and UWB
In Figure 1, the positioning accuracies and coverage
ranges of these approaches are illustrated.
A novel positioning system based on FMCW
radar is developed in the framework of
RESOLUTION. First feasibility studies have
indicated 3-D positioning accuracies in the
centimeter regime. This would significantly enhance
the state-of-the-art in terms of local positioning
accuracy. Further advantages are real-time ability
and self-sustaining operation independent on any
external operator.
2 FMCW RADAR
Different FMCW systems will be considered in the
RESOLUTION project. Potential approaches are
discussed in the next paragraphs. The final choice of
the architecture will be chosen with respect to
market specifications.
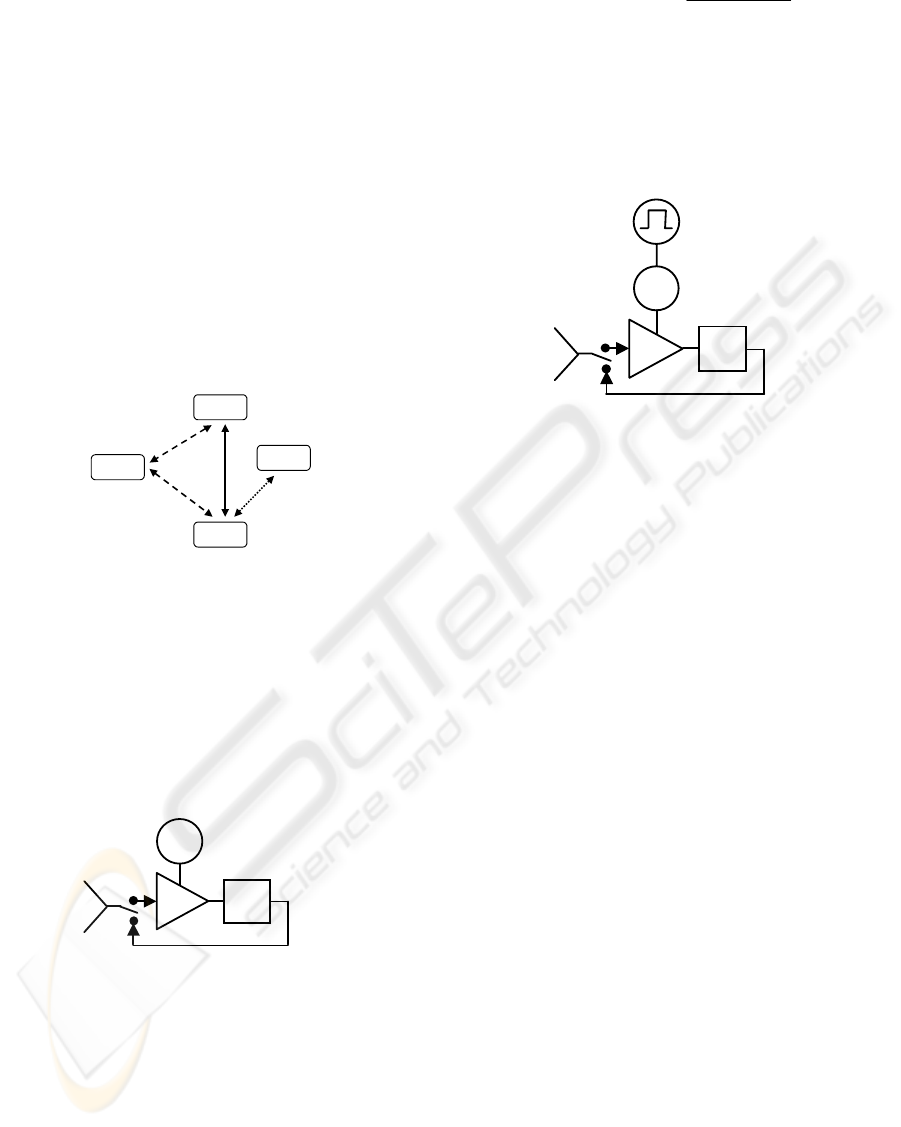
2.1 Functionality
In Figure 2, a basic approach of a FMCW
positioning radar is illustrated. An oscillator is
modulated by a ramp generator yielding a reference
signal, which is transmitted and reflected back. The
transmitted and reflected signals are denoted by LO
and RF, respectively.
Figure 2: Functional principle of FMCW radar for
positioning, TX: transmitter, RX: receiver.
Due to the time delay
Δ
t, the two signals have a
frequency offset f
IF
, which can be extracted by
mixing. Suppose that the mixer acts as frequency
subtractor yielding
IF LO RF
f
ff
=
− . (2)
~
d
VCO
Circ-
ulato
Mixe
r
f
LO
f
RF
Ramp
generator
TX mode
LO
f
IF
RX mode
LP
Filte
r
f
max
f
min
Δ
t
f
IF
LO
RF
BW
Indoor
Outdoor
local
Outdoor
global
RESOLUTION
GPS
Galileo
DGPS +
GSM/3G
Cell-ID +
GSM/3G
Positioning
+
mobile communication
0.1 0.3 1 10 30 100 1k 3k
0.1 1 10 100 1k 10k
Positioning accuracy [m]
Coverage range [m]
Tracking
Routing
Guiding
A
utomation
Enhanced guiding
A
ugmented reality
Field-strength +
WLAN, Bluetooth
TOA/
AOA
+
UWB
HPLS +
802.11
a/n
EU PROJECT RESOLUTION - Reconfigurable Systems for Mobile Local Communication and Positioning
363
Attributed to the linear dependence between d,
Δ
t
and f
IF
, the distance can be determined by
IF
df∼ . (3)
According to Figure 3 we can identify three types of
reflections. First, the desired one carrying the
distance information. Second, unwanted multipath
reflections. In the FMCW based approach, a major
part of the mutipath components can be suppressed
by lowpass filters, since the delayed multipath
components have a higher IF frequency than the
target object. Third, we have to consider reflections
at undesired objects not hitting the target object.
Approaches solving the latter problem are proposed
in the next sections.
Figure 3: Types of reflections.
2.2 Basestations with Active
Reflectors
This system consists of a basesation acting as
transmitter and a compact and low-power
consuming active sensor serving as reflector. In
Figure 4, the schematic of the reflector is illustrated.
Figure 4: Active reflector with modulated signal.
The feedback amplifier acts as oscillator excited
with the frequency of the input signal. By
modulating the reflector, the reflected signal is
associated with a specified modulation frequency
f
mod
. After filtering, the distance can be extracted on
basis of the spacing between the two remaining
frequency components located around f
mod
. The
corresponding relation yields (Wiebking, 2003)
mod
fc
d
f
8BW
⋅
=
⋅
Δ
(4)
with
Δ
f being the frequency offset of the frequency
components located around f
mod
, and the bandwidth
BW. Multiple objects can be detected by choosing
different modulation frequencies.
Figure 5: Active reflector with modulated and pulsed
signal.
Active sensor topologies allow amplitude recovery
of the signal resulting in enhanced coverage range.
However, the measurement accuracy is limited by
the jitter inherent in the reflector. By pulsing the
modulated reflector, this jitter can be reduced. The
corresponding circuit schematic is outlined in
Figure 5. Note that at every switch-on, the oscillator
frequency is coherent with respect to the input
frequency. Consequently, the signal frequency is
recovered at every pulse cycle.
2.3 Synchronized Frequency Ramps
The latter approach applies a compact, light-weight
and low-cost sensor, which is advantageous.
However, this sensor is not capable to act as
transmitter. A solution with equal transceiver
stations allowing for both transmit (master) and
reflect (slave) function may be favourable for many
applications. Efficient signal recovery can be
performed in the reflector station. To enhance the
performance, the incoming and outgoing signals are
synchronized in the reflector. As for the latter
approach, the distinction with respect to other
objects may be performed by signal modulation or
adding of an identification signal.
2.4 Conclusions
We can conclude that FMCW based positioning
approaches with active sensors are capable to
provide the following advantages:
Pulse
Δ
τ
A
mp
Delay
RX
TX
Modulation
~
f
mod
Δ
τ
A
mp
Delay
RX
TX
Modulation
~
f
mod
Target
TX/RX
REF2
REF1
Desired
Undesired
mutipath
Undesired
target
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
364
• High measurement accuracy due to extraction in
the frequency domain.
• We can clearly distinguish between target and
arbitrary objects.
• Detection of multiple objects is possible.
• Efficient rejection of multipath effects by means
of lowpass filtering in the frequency domain.
• Enlargement of coverage range by signal
recovery.
However, we also have to mention the following
disadvantages compared to approaches with passive
reflectors:
• Active sensors consume dc power and require a
battery.
• The complexity and costs are higher.
For many applications such as smart factories and
interactive guiding, the latter properties are not a
problem.
3 PARTNERS AND TASKS
The consortium combines multidisciplinary
competences and resources from academia and
industry including market-oriented service
providers. It consists of 1 large enterprise, 3
small/medium size enterprises, 1 research institute
and 5 universities, from 4 EU countries (2 of them
new EU countries) and one associated EU country.
Details including the key tasks of each partner are
outlined in Table 1.
4 APPLICATIONS
The developed positioning system does not require
any external service provider and can be applied for
various applications. Two examples are smart
factories and interactive guiding.
4.1 Smart Factories
A smart factory is based on knowing the position of
every workpiece, fabrication tool, transport
machinery or maintenance worker at any time and
everywhere. Position tracking performed by a host
enables several exciting new features:
• Complete overview over the location and amount
of all supplies and tools included in the
manufacturing process.
• By virtue of wireless networks, real-time data
access is possible anywhere and anytime.
• Due to information transfer enhanced global
management and product state monitoring is
possible.
• The level of automated fabrication can be
increased.
• Optimization of material flow and resource
delivery.
• Less storage area and material consumption.
• Reduced fabrication time.
• Efficient use of fabrication tools and machines.
• Collision avoidance and increased security.
Table 1: Partners and tasks.
Partner Core Role and Competence
1a. Swiss Federal Institute of Technology
(ETH) Zürich, Switzerland, U
Preparations/proposal writing
CMOS RF reflector design
1b. Dresden University of Technology*
Coordination
CMOS RF transmitter design
2. Siemens AG, Germany, LE Economic exploitation smart factories
Demonstrator design
Associate and market relevant project management
3. Technical University of Berlin, Germany, U CMOS RF receiver design
Experience with reconfigurable systems
4. University of Erlangen-Nuremberg,
Germany, U
System engineering and simulations
CMOS fractional-n synthesizers
5. RIO System, Israel, SME Linearization and smart power control of power amplifiers
6. Signal Generix, Cyprus, SME Signal processing, FPGA and baseband implementations
7. Warsaw University of Technology, Poland,
U
Antennas
Basic channel characterization and modeling
8. EXODUS S.A., Greece, SME Economic exploitation cultural and interactive guiding
9. Research and Educational Society in
Information Technology, RI
Algorithms for adaptive antenna combining including implementations
LE: large enterprise, SME: small and medium size enterprise, U: university, RI: research institute
*Participation is planned in Aug. 2006, meanwhile tasks are performed by ETH Zürich
EU PROJECT RESOLUTION - Reconfigurable Systems for Mobile Local Communication and Positioning
365

4.2 Interactive Guiding
Real-time based active mapping, e.g. for advanced
sightseeing, in museums, shopping malls and
amusement parks are useful for guiding of
pedestrians. The positioning is marked in a PDA
based map and can be transferred to a server.
Location dependent actions can be applied to
increase the amusement and information quality.
The services can be combined with location-aware
billing, which decreases personnel costs and
improves the billing system.
5 FIRST RESULTS
The project has just started. However, first
experiments with the master/slave approach
employing synchronized frequency ramps according
to Section 2.3 have already been performed. A 1-D
positioning accuracy of 20 cm at a coverage range of
up to 20 m is demonstrated.
6 CONCLUSIONS
A brief presentation of the EU project
RESOLUTION has been given, which aims to
develop a localization system with 3D accuracy in
the centimeter range on basis of FMCW radar.
REFERENCES
F. Ellinger, Radio Frequency Integrated Circuits and
Technologies, Springer, to be published 2006.
R. J. James, “A history of radar“, IEE Review, Vol. 35,
No. 9, pp. 343-349, 1989.
M. Skolnik, Radar Handbook, McGraw-Hill, 1990.
M. Vossiek, L. Wiebking, P. Gulden, J. Wieghardt, C.
Hoffmann, P. Heide, “Wireless local positioning”,
IEEE Microwave Magazine, Vol. 4, No. 4, pp. 77-86,
Dec. 2003.
L. Wiebking, Entwicklung eines zentimetergenauen
mehrdimensionalen Nahbereichs-Navigations-
Systems, VDI Verlag, 2003.
WINSYS 2006 - INTERNATIONAL CONFERENCE ON WIRELESS INFORMATION NETWORKS AND SYSTEMS
366
