
CREATING AND MANIPULATING CONTROL FLOW GRAPHS
WITH MULTILEVEL GROUPING AND CODE COVERAGE
Anastasis A. Sofokleous
Brunel University, Uxbridge, UK,
Andreas S. Andreou, Gianna Ioakim
University of Cyprus, Nicosia, Cyprus
Keywords: Control Flow Graph, Node Grouping, Code Coverage.
Abstract: Various researchers and practitioners have proposed the use of control flow graphs for investigating
software engineering aspects, such as testing, slicing, program analysis and debugging. However, the
relevant software applications support only low level languages (e.g. C, C++) and most, if not all, of the
research papers do not provide information or any facts showing the tool implementation for the control
flow graph, leaving it to the reader to imagine either that the author is using third party software for creating
the graph, or that the graph is constructed manually (by hand). In this paper, we extend our previous work
on a dedicated program analysis architecture and we describe a tool for automatic production of the control
flow graph that offers advanced capabilities, such as vertices grouping, code coverage and enhanced user
interaction.
1 INTRODUCTION
In our previous work (Andreou, Sofokleous, 2004),
we presented the design and implementation details
of a new basic program analyzer architecture. The
architecture was designed to provide the capabilities
of a program analyzer to other external applications,
such as slicing tools, test case generators, debuggers
etc. Although the result of the control flow graph
construction was accurate and clear-sighted for
small to medium programs, it became evident that
for large programs its performance and viewing-
ability were degraded. As each screen is limited by
its own resolution, then it is very obvious that the
more components a graph has, the more difficult for
a user to perceive it. In addition, layout algorithms
performance and memory requirements depend on
the number of graph elements, making it harder to
depict a graph as its size grows. The rest of the paper
is organized as follows: section 2 presents the
current research status in this area and discusses the
theoretical background of our proposition. Section 3
provides the design details of the proposed
architecture and describes its basic parts. Finally,
section 4 draws the conclusions and provides some
directions for future work.
2 LITERATURE OVERVIEW
Control Flow Graphs have been widely used in the
static analysis of software. McCabe (McCabe 1976),
was among the first that used the control flow graph
for the study of software. Furthermore, Fenton,
Whitty and Kaposi, (Fenton, Whitty et al. 1985),
studied the structuredness of software, using the
graphic representations of program flow. On the
other hand, the Program Dependence Graph (PDG)
has been proposed by Ottenstein and Ottenstein
1984 (Ottenstein, Ottenstein 1984), (Ferrante,
Ottenstein et al. 1987) addressing the internal
representation for monolithic programs (programs
that contain one unique block) and trying to
implement certain processes of software technology,
like slicing and estimation of metrics. Control flow
information indicates the possible routes of
instructions following the execution of a program
(Damian 2001). The appropriate analysis of a
259
A. Sofokleous A., S. Andreou A. and Ioakim G. (2006).
CREATING AND MANIPULATING CONTROL FLOW GRAPHS WITH MULTILEVEL GROUPING AND CODE COVERAGE.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - DISI, pages 259-262
DOI: 10.5220/0002448802590262
Copyright
c
SciTePress

control flow graph provides information about the
run-time and non-runtime properties of programs
(e.g. determination of what functions may be called
at each application point in a program). In addition,
some other researchers have demonstrates its ability
to serve several application areas such as induction
variable elimination, type recovery etc. (Shivers
1991). Although many authors propose the use of
CFG, its extraction stays usually at a minimum
level, supporting a limited set of commands (Jones,
Mycroft 1986).
Graph visualization, is a kind of process that is
not the same for all graphs. Many characteristics
make this kind of practice different and usually
complicated. For instance, a graph of a large size
(i.e. a graph that has many elements) poses several
difficult obstacles in terms of performance and
memory. Supposing that it is feasible to layout and
display all the elements of the graph, it is still almost
impossible to distinguish the nodes from the edges
and therefore the viewing ability and usability is
dramatically decreased (Herman, Melançon et al.
2000). Therefore, reducing the number of visible
elements being viewed may turn to be very useful,
improving the clarity and the performance of the
layout and the rendering algorithms (Kimelman,
Leban et al. 1994). Such techniques are referred in
the literature as cluster analysis, grouping, clumping,
classification and unsupervised pattern recognition
(Everitt 1974), (Mirkin 1996). Many efforts have
been made thus far to develop software frameworks
intended to be used with mathematics and include
large libraries of algorithms, while others target
more general applications (Berry, Dean et al. 1999,
Cesar 1999.).
Graph architectures, like ProDAG (Richardson,
O'Malley et al. 1992), have been used as dependence
analysis tools for Ada and C++ programs. ProDAG
identifies dependencies based on the program
dependence relationships defined by Podgurski and
Clarke. Dependence analysis is performed by
ProDAG in a two-step process. First, a language-
specific intermediate representation is created, and
then language-independent analysis is performed
over this representation. In (Cooper, Harvey et al.
2002), the authors present an algorithm for building
correct control flow graphs from scheduled
assembly code. However this kind of analysis is
useful if the target code is expressed at the assembly
level.
3 EXTENDING THE BPAS
SYSTEM
The proposed Basic Program Analyzer System
(BPAS) is decomposed into two subsystems
performing two types of analysis, the runtime (or
dynamic analysis) and the non-runtime analysis (or
static analysis) respectively. Both sub-systems can
provide a mixture of information and operations
about the program under study, such as variable and
scope identification, control flow graph creation,
code coverage and running simulation. Thus,
external applications can use their functionality for
obtaining this information. While the non-runtime
analysis is carried out without executing the
program, the runtime analysis evaluates the
behaviour of the program and gathers information
during real or simulated execution. The layered
architecture is built similarly to the traditional OSI
communication standard and therefore it enjoys its
advantages as well. Each module responsible for a
specific process is placed as an intermediary layer to
the system, or as an additional layer that can be
activated at any point of time. The layered design
offers scalability and expandability to the system.
This is also supported by the present work since the
module responsible for the control flow graph
creation has been replaced with a new version
without affecting the other modules.
The most important BPAS modules are the
IOExecutive, the Parser, the Walker, the Static
Analyzer (Non-Runtime Analysis), the Dynamic
Analyzer (Runtime Analysis) and the program code
coverage. Although the BPAS works only with Java
code, its design and layered composition make
possible the use of additional programming
languages with minor adaptations in the Parser layer
and the creation of a new grammar specification.
3.1 Constructing the Control Flow
Graph with Grouping (Detail
Level)
At the stage of non-runtime program analysis, the
analyzer creates the control flow graph without
executing the program. Although the old control
flow graph algorithm proposed in (Andreou,
Sofokleous 2004) was satisfactory for small to
medium programs, it became evident that for large
programs its performance and memory requirements
were significant and its viewing ability was affected.
Having that in mind, we propose here the concept of
multi-grouping, that is, the ability to display the
ICEIS 2006 - DATABASES AND INFORMATION SYSTEMS INTEGRATION
260
same information in fewer vertices and provide the
option for the selection of the level of detail. The
basic idea is that the user defines the number of the
levels of detail before the analysis.
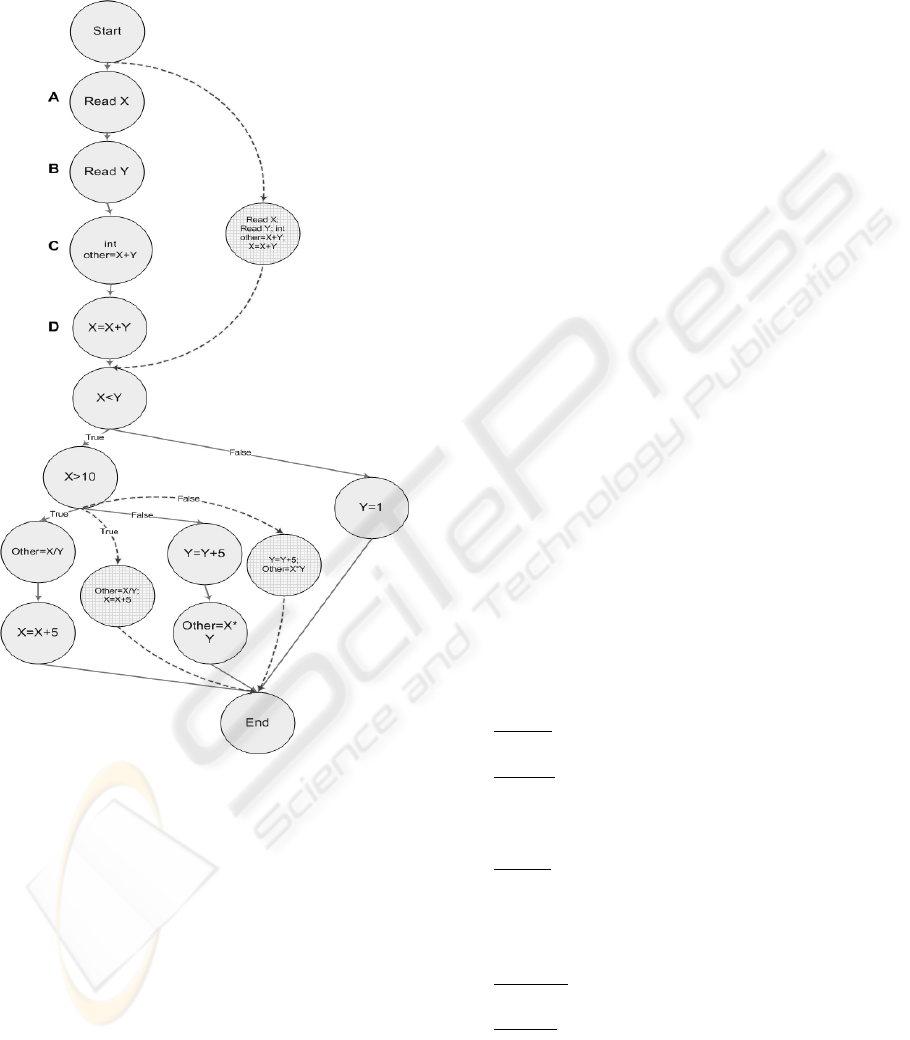
Figure 1: Multilevel Grouping.
For instance, if this level number is set to 2 the
control flow graph will have two levels of details
(figure 1). The lowest level is the default level,
which is displayed initially on screen. The default
level has 8 vertices (including Start, End nodes) and
8 edges; some of its vertices/edges belong also to the
highest level of the control flow graph (common
elements). The highest level control flow graph
having 13 vertices and 14 edges is the “expanded
graph” or the graph without grouping. Each level of
grouping has its own rules (i.e. which
statements/expressions are grouped). In the example,
the levels of detail mean that the first level will have
the grouping of neighbouring vertices that are simple
statements only. Specifically, for vertices A(Read
X), B(Read Y), C(int other=X+Y), D(X=X+Y) a new
vertex is created that has as value the value of the
A,B,C,D vertices joined with semicolons. The new
vertex ABCD is connected with a new outgoing
edge to the descendent of the D vertex and with a
new incoming edge from the precedent of the A
vertex. The new vertices and edges are displayed
with dash lines in the figure. Although the two
graphs have common edges and vertices, only edges
and vertices belonging to the selected graph net are
viewable at any point of time. The set of common
elements in this example include the vertex (X<Y)
and its outgoing edges. Having more levels involves
grouping of nested code blocks. The desired number
of levels depends on the size of the program and the
usage objective.
3.2 The Code Coverage Module
The common Code Coverage (CC) module, which is
part of the runtime analysis system, simulates the
execution of the program and at the same time it is
able to indicate the executed/covered code. Code
coverage may be used by other application systems,
such as testing systems, development tools,
debuggers etc. Such systems need to determine the
covered vertices (or the executed code/statements)
for each pair of input (test case). The particular
module is incorporated in our architecture being able
to extract not only this kind of information but
additional pieces as well, such as the executed path
from start to end, the covered code, how many times
each vertex was executed etc. The code coverage
module simulates the real execution of a program
under study (virtual running) as follows:
Step 1:
A pair of input values is given to the CC
module.
Step 2:
A control flow graph visitor takes the
values and begins the graph walking from the start
node. At each vertex, the visitor executes (simulates
the real execution of) the statements and conditions.
Step 3:
Each variable is stored in a data structure
having an initial value, a current value and a variable
name. The current variable value is updated each
time the visitor evaluates a relevant to this variable
statement.
Step 4:
The visitor marks the visited
vertices/statements.
Step 5:
The user is able to interact with the
program and view the executed vertices/statements.
In addition, information about the program or the
node is provided by the enhanced user interface.
CREATING AND MANIPULATING CONTROL FLOW GRAPHS WITH MULTILEVEL GROUPING AND CODE
COVERAGE
261

4 CONCLUSIONS AND FUTURE
WORK
This paper describes the utilization of grouping
algorithms in cooperation with control flow graphs
for software analysis purposes. While a number of
algorithms for grouping common visual graphs and
their elements have been proposed, control flow
graph clustering algorithms imply a different kind of
processing. In this context we extended our previous
work on program analysis and we replaced the
existing module that creates the control flow graph
with a new, modified algorithm that can manipulate
the control flow graph prior to displaying it so as to
provide optional levels of details. The basic program
analyzer was tested extensively in a number of
programs ranging from 100 to 20,000 lines of code,
and having different types of statements. The results
demonstrate the ability of the proposed grouping
feature of the new control flow algorithm is able to
handle large programs with different types of
statements (or equivalently different complexity). In
addition, this paper introduces a new software
module, which performs code coverage processing,
the latter enhancing and completing the proposed
architecture.
With the above feature the modified Basic
Program Analyzer broadens its scope and allows its
usage by additional types of application tools: The
grouping of vertices in different levels of detail
provides the means to investigate larger programs,
since performance and memory no longer constrain
the process. In addition, the ability to select the level
of display detail aids the easy comprehension of a
large program graph, since the analyzer is able to
depict the same information with less graph
elements.
REFERENCES
Andreou, A. and Sofokleous, A., 2004. Designing and
implementing a layered architecture for dynamic and
interactive program analysis, Proceedings of IADIS
International Conference, Portugal, Spain.
Berry, J., Dean, N., Goldberg, M., Shannon, G. and
Skiena, S., 1999. Graph Drawing and Manipulation
with LINK, Proceedings of the Symposium on Graph
Drawing GD’97, Springer–Verlag pp425-437.
Cesar, C., L., 1999, 1999.-last update, graph foundation
classes for java, IBM2005.
Cooper, K., D., Harvey, T., J. and Waterman, T., 2002.
Building a Control-flow Graph from Scheduled
Assembly Code. TR02-399.
Damian, D., 2001. On Static and Dynamic Control-Flow
Information in Program Analysis and Transformation,
Ph.D. Thesis, BRICS Ph.D. School, University of
Aarhus, Aarhus, Denmark
Everitt, B., 1974. Cluster Analysis. 1st edn. Heinemann
Educational Books.
Fenton, N., E., Whitty, R., W. and Kaposi, A., A., 1985. A
generalised mathematical theory of structured
programming. Theoretical Computer Science, 36, pp.
145-171.
Ferrante, J., Ottenstein, K., J. and Warren, J., D., 1987.
The program dependence graph and its use in
optimization. ACM Transactions on Programming
Languages and Systems, 9(3), pp. 319-349.
Herman, I., Melancon, G. and Marshall, M.S., 2000.
Graph Visualization and Navigation in Information
Visualization: a Survey. IEEE Transactions on
Visualization and Computer Graphics, 6, pp. 1-21.
Jones, N., D. and Mycroft, A., 1986. Data flow analysis of
applicative programs using minimal function graphs,
Proceedings of the 13th ACM SIGACT-SIGPLAN
symposium on Principles of programming languages,
St. Petersburg Beach, Florida, pp296-306.
Kimelman, D., Leban, B., Roth, T. and Zernik, D., 1994.
Reduction of Visual Complexity in Dynamic Graphs,
Proceedings of the Symposium on Graph Drawing GD
’93, Springer–Verlag.
MCcabe, T., 1976. A Complexity Measure. IEEE
Transactions on Software Engineering, SE-2, no.4, pp.
308-320.
Mirkin, B., 1996. Mathematical Classification and
Clustering, Kluwer Academic Publishers.
Ottenstein, K., J. and Ottenstein, L., M., 1984. The
program dependence graph in a software development
environment. Proceedings of the ACM
SIGSOFT/SIGPLAN Software Engineering
Symposium on Practical Software Development
Environments, 19(5), pp. 177-184.
Richardson, D., J., O'Malley, T., O., Moore, C., T. and
AHA, S., L., 1992. Developing and Integrating
ProDAG in the Arcadia Environment, In SIGSOFT
'92: Proceedings of the Fifth Symposium on Software
Development Environments, pp109-119.
Shivers, O., 1991. Control-Flow Analysis of Higher-Order
Languages. CMU-CS-91-145. Carnegie Mellon
University, Pittsburgh, Pennsylvania
ICEIS 2006 - DATABASES AND INFORMATION SYSTEMS INTEGRATION
262
