
HYBRID MODELING USING i* AND AGENTSPEAK(L) AGENTS IN
AGENT ORIENTED SOFTWARE ENGINEERING
Aniruddha Dasgupta, Farzad Salim, Aneesh Krishna, Aditya K.Ghose
Decision Systems Lab, School of IT and Computer Science,University of Wollongong
Wollongong, NSW 2522, Australia
Keywords:
Requirements Engineering, agents, i*, AgentSpeak(L).
Abstract:
In this paper we use i* which is a semi-formal modelling framework to model agent based applications. We
then describe how we execute these models into AgentSpeak(L) agents to form the essential components of
a multi-agent system. We show that by making changes to the i* model we can generate different executable
multi-agent systems. We also describe reverse mapping rules to see how changes to agents in the multi-agent
system gets reflected in i* model. This co-evolution of two models offers a novel approach for configuring
and prototyping agent based systems.
1 INTRODUCTION
Agent-oriented approaches are becoming popular in
software engineering, both as architectural frame-
works, and as modeling frameworks for requirements
engineering and design. Many modeling techniques
tend to address late-phase requirements while the vast
majority of critical modeling decisions (such as deter-
mining the main goals of the system, how the stake-
holders depend from each other, and what alternatives
exist (Yu, 1995)) are taken in early-phase require-
ments engineering. The i* modeling framework (Yu,
1995) is a semiformal notation built on agent-oriented
conceptual modeling that is well-suited for answer-
ing these questions. AgentSpeak(L) (Rao, 1996) is
an agent programming language with logic-based for-
malism for specifying processes that involves multi-
ple agents. These two formalisms complement each
other well, and in this work, we develop a methodol-
ogy for their combined use in requirements engineer-
ing.
We enhance and apply the techniques developed in
(Salim et al., 2005) to design a meeting scheduler us-
ing i* modeling (Yu, 1995) framework to produce ex-
ecutable AgentSpeak(L) agents. The i* framework
is used to model different alternatives for the de-
sired system, analyze and decompose the functions
of the different actors, and model the dependency re-
lationships between the actors and the rationale be-
hind process design decisions. The AgentSpeak(L)
framework is then used to specify the system behav-
ior described informally in the i* model. Complete
AgentSpeak(L) models are executable which can be
used to validate the specifications by simulation. We
then describe a set of reverse mapping rules by which
we can make modifications to the AgentSpeak(L) ex-
ecutable model to get a new set of of i* model.
The remainder of this article is organized as follows.
Section 2 gives an overview of agent based prototyp-
ing using i* and describes how the meeting scheduler
is modeled using i*. Section 3 gives an overview
of AgentSpeak(L). Section 4 discusses how i* and
AgentSpeak(L) can be combined by a set of map-
ping rules to trace a wide range of properties of agent
based architecture. Finally, concluding remarks are
presented in the last section.
2 i* MODELING FRAMEWORK
The i* (Yu, 1995) for agent-oriented conceptual mod-
eling was designed primarily for early-phase require-
ments engineering. An i* consists of two main mod-
eling components: the Strategic Dependency (SD)
Model and the Strategic Rationale (SR) Model.
Intentional actors (SR) that are the central concept in
i*, represent the intentional properties of an actor such
as goals, beliefs, abilities and commitments.
Both SD and SR diagrams are graphical representa-
tions that describe the world in a manner closer to the
420
Dasgupta A., Salim F., Krishna A. and K.Ghose A. (2006).
HYBRID MODELING USING i* AND AGENTSPEAK(L) AGENTS IN AGENT ORIENTED SOFTWARE ENGINEERING.
In Proceedings of the Eighth International Conference on Enterpr ise Information Systems - ISAS, pages 420-425
DOI: 10.5220/0002453004200425
Copyright
c
SciTePress
users perceptions. The SD diagram consists of a set
of nodes and links. Each node represents an “actor”,
and each link between the two actors indicates that
one actor depends on the other for something in order
that the former may attain some goal. The depend-
ing actor is known as depender, while the actor de-
pended upon is known as the dependee. The object
around which the dependency relationship centers is
called the dependum. The SD diagram represents the
goals, task, resource, and soft goal dependencies be-
tween actors/agents. In a goal-dependency, the depen-
der depends on the dependee to bring about a certain
state in the world. The dependee is given the free-
dom to choose how to do it. In a task-dependency,
the depender depends on the dependee to carry out
an activity. In a resource-dependency, one actor (the
depender) depends on the other (the dependee) for
the availability of a resource. In each of the above
kinds of dependencies, the depender becomes vulner-
able in situations where the dependee fails to achieve
a goal, perform a task or make a resource available.
In a softgoal-dependency, a depender depends on the
dependee to perform certain goals or task that would
enhance the performance. The notion of a softgoal de-
rives from the Non-Functional Requirements (NFR)
framework (Chung et al., 2005) and is commonly
used to represent optimization objectives, preferences
or specifications of desirable (but not necessarily es-
sential) states of affairs.
A SR diagram represents the internal intentional char-
acteristics of each actor/agent via task decomposition
links and means-end links. The task decomposition
links provide details on the tasks and the (hierarchi-
cally decomposed) sub-tasks to be performed by each
actor/agent while the means-end links relate goals to
the resources or tasks required to achieve them. The
SR diagram also provides constructs to model alter-
nate ways to accomplish goals by asking why, how
and how else questions.
We shall use the example of a meeting scheduler as
described in (Yu, 1997) throughout the rest of this pa-
per to illustrate how the i* models can be executed.
Interested readers may refer to (Yu, 1997) for a de-
tailed overview. The meeting scheduler should try to
determine a meeting date and location so that most of
the intended participants will participate effectively.
The system would find dates and locations that are as
convenient as possible. The meeting initiator would
ask all potential participants for information about
their availability to meet during a date range, based on
their personal agendas. This includes an exclusion set
dates on which a participant cannot attend the meet-
ing, and a preference set dates preferred by the partic-
ipant for the meeting. The meeting scheduler comes
up with a proposed date. The date must not be one of
the exclusion dates, and should ideally belong to as
many preference sets as possible. Participants would
agree to a meeting date once an acceptable date has
been found. The modeling process includes steps as
follows
1. Identify actors.
2. Identify goals.
3. Identify Dependency relationships.
4. Conduct means-end and task-decomposition analy-
sis.
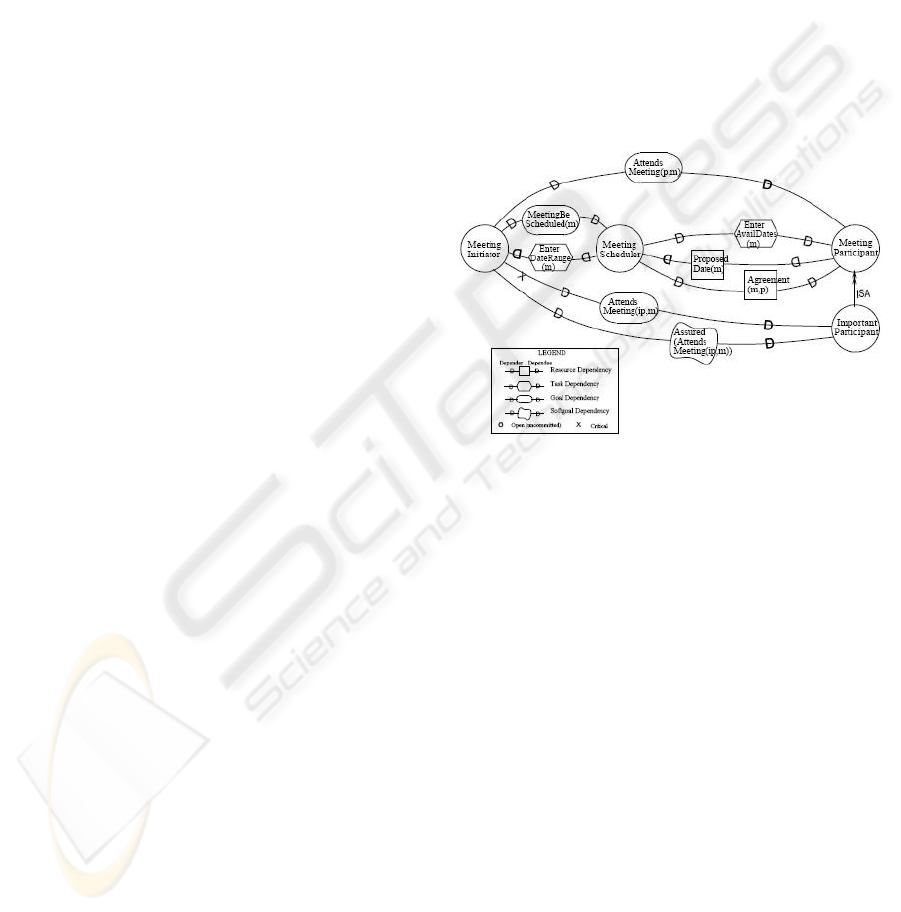
Using steps 1 to 3 above, we get the SD diagram as
shown in Figure 1. The SD model provides an im-
portant level of abstraction for describing systems in
relation to their environments, in terms of intentional
relationships among them. This allows the analyst
to understand and analyze new or existing organiza-
tional and system configurations even if the internal
goals and beliefs of individual agents are not known.
Figure 1: Strategic Dependency Diagram.
To explore the reasons behind such dependency rela-
tionships in SD models we need the intentions of the
agents that initiate the process. We also define soft
goals for each agent which are similar to goals except
that they do not have clear-cut criteria of satisfaction
(Simon, 2005). They commonly express qualitative
goals. Intentional elements (goals, tasks, resources,
and softgoals) appear in the SR model not only as
external dependencies, but also as internal elements
linked by task-decomposition and means-ends rela-
tionships. During this step, goals and tasks are further
decomposed into subgoals and subtasks. The output
of this step is a SR diagram for each actor. The SR di-
agram for each of the actors namely meeting initiator,
meeting scheduler and meeting participant is shown
in Figure 2 using step 4 mentioned earlier.
3 AgentSpeak(L)
AgentSpeak(L) is an agent framework/language with
explicit representations of beliefs and intentions
for agents. This agent programming language
HYBRID MODELING USING i* AND AGENTSPEAK(L) AGENTS IN AGENT ORIENTED SOFTWARE
ENGINEERING
421
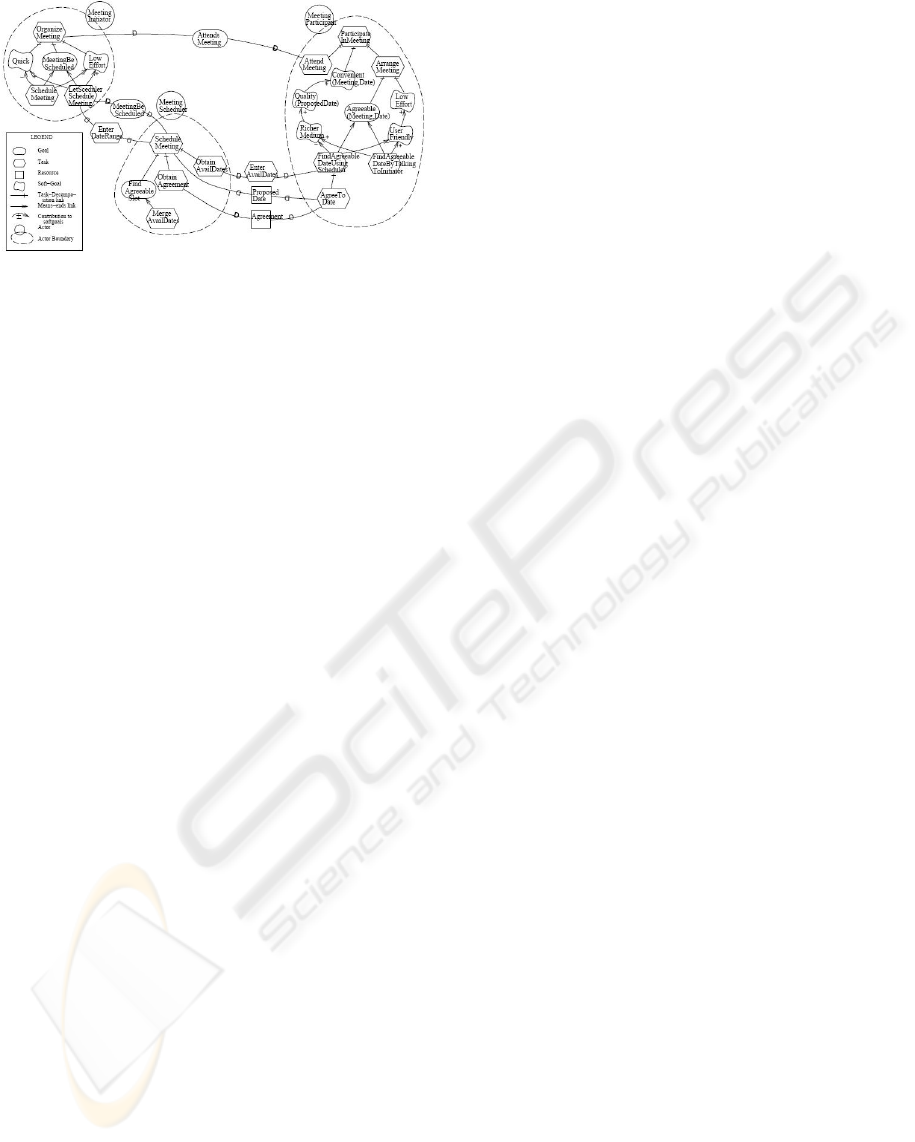
Figure 2: Strategic Rationale Diagram.
was initially introduced in (Rao, 1996). Rao
describes an AgentSpeak(L) agent as a set of
E , B , P, I , A, S
E
, S
O
, S
I
where:
• E is a set of events.
• B is a set of base beliefs.
• P is a set of plans.
• I is a set of intentions.
• A is a set of atomic actions.
• S
E
selects an event from the set E.
• S
O
selects a plan from the set P .
• S
I
selects an intention from the set I.
There are two types of goals in AgentSpeak(L). An
“achievement goal” (a predicate prefixed with “!”),
states that the agent wishes to achieve a state of the
world in which the associated predicate is true. A
“test goal” (a predicate prefixed with “?”), states that
the agent wishes to test if the associated predicate is
a true. Events in AgentSpeak(L) might be external
or internal. External events represent the changes in
the state of the world that should be handled by the
agent. On the other hand, internal events are trig-
gered from within the agent as a result of executing
a plan. An agent must have pre-designed plans in its
plan library to handle the incoming internal or exter-
nal events. Plans are the central concept to the abili-
ties of an agent. They are means that enable an agent
to respond to the changes in its’ environment. A plan
of an agent is composed of two main parts, head and
body. The head is a pair consisting of a triggering
event and context. A plan in AgentSpeak(L) is of the
form:
e : b
1
; ...; b
n
← h
1
; ...; h
n
.
e is a triggering event (trigger), b
1
; ...; b
n
are belief
literals (context), and h
1
; ...; h
n
are goals or actions
(body). Triggering event is used to identify if the plan
is a relevant plan for an given event selected from E.
Context of a plan consists of beliefs that should hold
for that plan to be applicable. Body of a plan is a
sequence of sub-goals or actions that should be exe-
cuted for a plan to be successfully completed. Events,
regardless of their types (internal/external), but based
on their affects on the agent’s belief are divided into
two categories:
(1) Events that add a belief/goal is prefixed with “+”.
(2) Events that delete a belief/goal from the agent’s
beliefs is prefixed with “-”.
Intentions are formed when an agent commits to a
particular set of plans to achieve its goal(s).
4 MAPPING i* MODEL TO
AgentSpeak(L) AGENTS
A first step in defining a co-evolution methodology
for i* and AgentSpeak(L) is to define a mapping from
i* to AgentSpeak(L). We provide the results from the
earlier work (Salim et al., 2005) where this mapping
was initially defined and full versions of the schemas
have been described. The intersected reader may go
through (Salim et al., 2005) for a complete overview.
A multi-agent system (MAS) is defined in (Salim
et al., 2005) as follows.
MAS is a pair Agents, ESA where Agents=
a
1
, ··· ,a
n
, each a
i
is an AgentSpeak(L) agent
and ESA is a specially designated Environment
Simulator Agent implemented in AgentSpeak(L).
ESA holds the knowledge about the actions that
might be performed by actors in SD model and
the possible environment transformation after the
executions of those actions. The environment agent
can verify fulfillment properties (clearly defined in
Formal Tropos (Fuxman et al., 2003)), which include
conditions such as creation conditions, invariant con-
ditions, and fulfillment conditions of those actions
associated with each agent. Every action of each
agent has those fulfillment properties. ESA is used
to check whether those actions of all agents in this
system satisfy corresponding conditions. While ESA
is an AgentSpeak(L) agent, it must be provided with
necessary beliefs as well as the plans. The context
of the plans determine the constraints that must hold.
Likewise, actions in the body are how to react to the
situation.
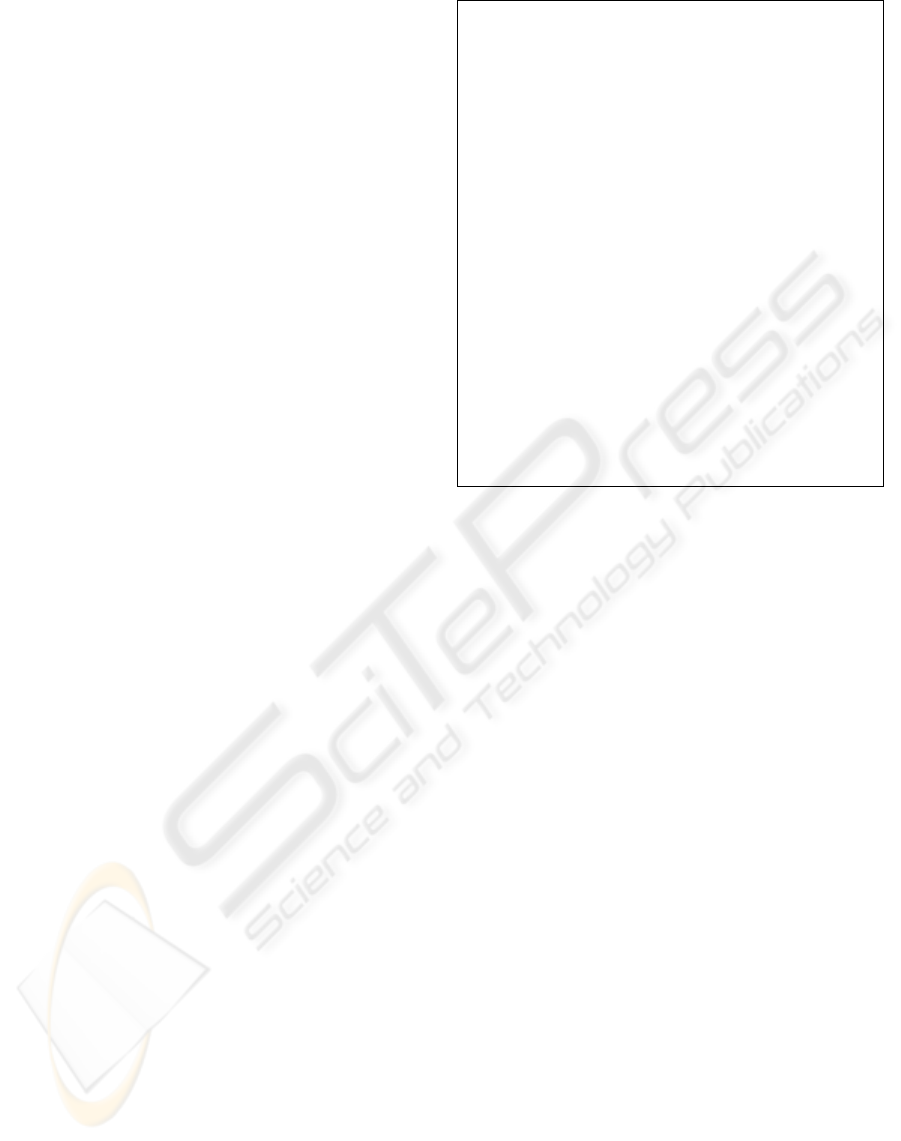
From the mapping rules, the agents in the MAS are
Meeting Scheduler, Meeting Participant and Meeting
Initiator. We map the edges and nodes for each
agent from the SR diagrams for each actor which
defines the goal, task and resource dependencies
into AgentSpeak(L) plans. The result of applying
these rules are shown in Figures 3, 4 and 5 which
depict the AgentSpeak(L) agents. Note that some
of the plans that does not have any body does not
exist in the actual programs. However, we show them
in these figures to avoid the confusion and improve
ICEIS 2006 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
422
the clarity of the paper. It is to be noted here that
beside the three agents, the ESA is also supplied by
the modeler of the system (not shown here). The
ESA monitors all of the actions/tasks performed by
each agent, all of the messages exchanged and all
of the beliefs communicated by individual agents
for consistency and for constraint violations. When
any of these is detected, the ESA generates a user
alert. The softgoals of the actors are translated into
the option selection function of AgentSpeak(L) as
described in (Salim et al., 2005). By executing the
AgentSpeak(L) agents, one can test out the various
scenarios whereby given a set of beliefs, whether
a given range of dates will be available. Thus the
executable specification forms a basis whereby the
user can determine the behavior of the system.
Given two goal predicate symbols, goal, task ,a
belief predicate symbol resource and a term t:
− !goal(t) is a valid goal iff t ∈ N
G
.
− !task (t) is also a valid goal iff t ∈ N
T
.
− resource (t) is a valid belief atom iff t ∈ N
R
.
Given four action predicate sym-
bols, RequestAchieve, RequestPerform,
RequestResourse, Supply and a term t:
− RequestAchieve(t) is a valid action iff t ∈ N
G
.
− RequestPerform(t) is a valid action iff t ∈ N
T
.
− RequestResource(t) is a valid action iff t ∈ N
R
.
− Supply(t) is also a valid action iff t ∈ N
R
.
N
G
, N
T
and N
R
are goal, task and resource node
respectively in SR and SD diagrams.
5 CO-EVOLUTION OF i* AND
AgentSpeak(L)
We now propose a hybrid modeling approach from
the mapping rules mentioned earlier. This hybrid
modeling is composed of i* model and AgentS-
peak(L) agents, that is, when we have an i* model
constructed for a given system, then we can also get
the AgentSpeak(L) agents of this system using map-
ping rules. Our problem representation, as shown
in Figures 3, 4 and 5, is an executable specification
because it is an operational AgentSpeak(L) program-
ming which can be run in an multi-agent environment
like Jason(Bordini et al., 2005) which could there-
fore check the initial i* model by executing AgentS-
peak(L) agents. In this hybrid model, these two ba-
sic models, i* and AgentSpeak(L) agents, might co-
evolve. At each stage, the i* model and AgentS-
peak(L) agents are consistent. Using translation steps,
they can be translated into each other. This co-
evolution process will involve two aspects:
• reflect the changes of i* model on AgentSpeak(L)
agents
Actions
RequestAchieve(AttendMeeting).
RequestAchieve(MeetingBeScheduled).
Perform(EnterDateRange).
Plans
+task(OrganizeMeeting): True < −
!goal(MeetingBeScheduled),
RequestAchieve(AttendMeeting).
+goal(MeetingBeScheduled): True < −
!task(ScheduleMeeting).
+goal(MeetingBeScheduled): True < −
!task(LetSchedulerScheduleMeeting).
+task(ScheduleMeeting): True < − .
+task(LetSchedulerScheduleMeeting): True < −
RequestAchieve(MeetingBeScheduled),
Perform(EnterDateRange).
Figure 3: AgentSpeak(L) plans for Meeting Initiator Agent.
• reflect the changes of AgentSpeak(L) agents on i*
model
There are sixteen categories of possible changes that
may occur to i* model. These are the addition and
deletion of the following eight elements: Dependen-
cies, Tasks, Goals, Resources, Softgoals, Means-end
links, task-decomposition links and Actors. As for
our work to reflect the changes of i* model to AgentS-
peak(L) program, we only put emphasis on nodes,
goals, tasks, softgoals, dependencies. The changes of
those nodes will also bring the changes to the links.
We shall consider each of these cases in turn.
• Addition/deletion of a task to an existing SR model:
Addition: 1) If the new task is a top-level task, add
this it into the set of actions, and write correspond-
ing plans if there are subnodes connected to it by
task-decomposition links. 2) If the new task is con-
nected to a parent task by task-decomposition link,
then add this task to the relevant plan whose head is
the parent task. 3) If the new task is connected by
means-end link to a goal node which has no other
task or goal that connected to it, then add the cor-
responding plan to the set of plans. 4) If the new
task is connected by means-end link to a goal node
which has other tasks or goals connected to it and
this new task is also jointed with softgoals used as
the criteria for means selection, then add the belief
of the relationship of task and softgoals and mod-
ify the plan for that goal. Deletion: Delete all the
elements that are relevant to that task. This may
HYBRID MODELING USING i* AND AGENTSPEAK(L) AGENTS IN AGENT ORIENTED SOFTWARE
ENGINEERING
423
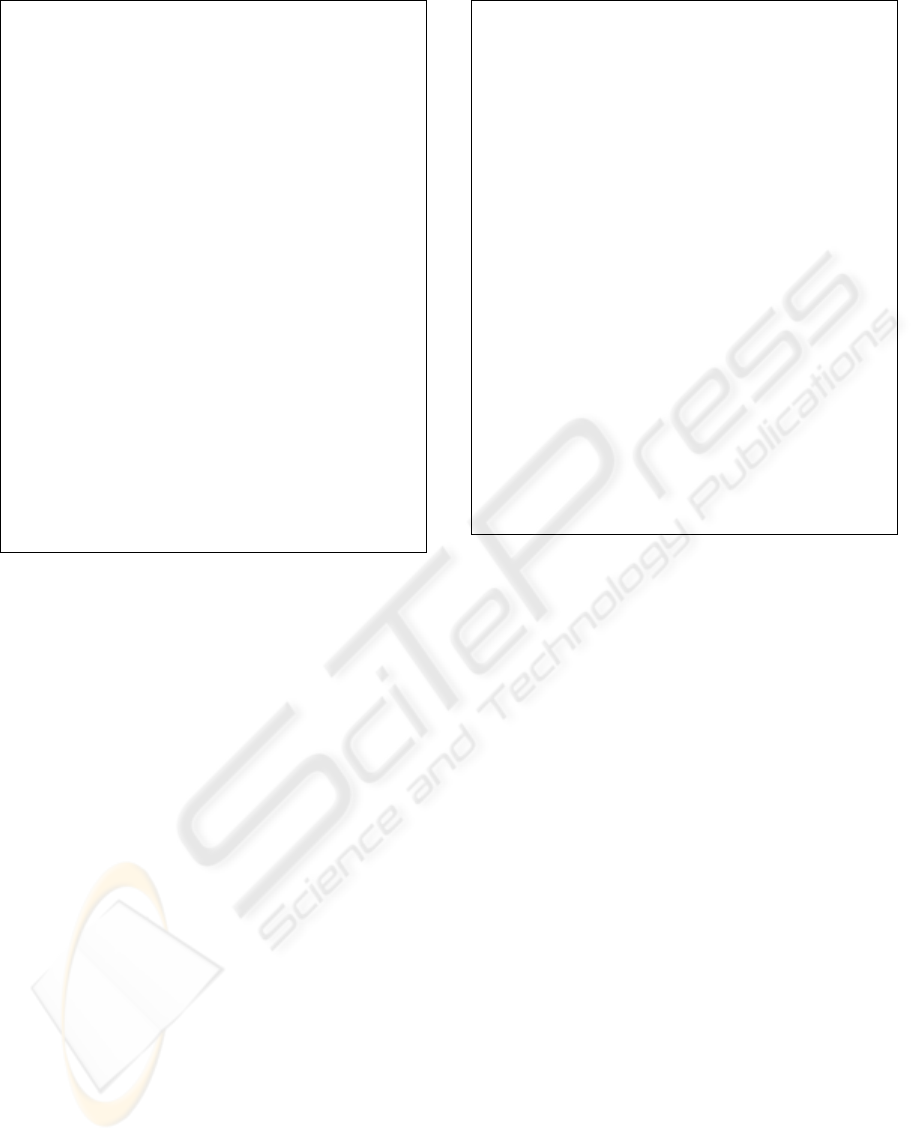
Actions
Supply(ProposedDate).
RequestPerform(EnterDateRange).
RequestPerform(EnterAvailDates).
RequestResource(Agreement).
Plans
+task(ScheduleMeeting): True < −
!goal(FindAgreeableSlot),
!task(ObtainAgreement),
!task(ObtainAvailDates),
Supply(ProposedDate),
RequestPerform(EnterDateRange).
+task(ObtainAvailDates): True < −
RequestPerform(EnterAvailDates).
+task(ObtainAgreement):True < −
RequestResource(Agreement).
+goal(FindAgreeableSlot): True < −
!task(MergeAvailDates).
+task(MergeAvailDates):True < −.
Figure 4: AgentSpeak(L) plans for Meeting Scheduler
Agent.
include deletion of the task and softgoal relation-
ship formula from belief base, deletion of the plans
whose head is this task, deletion of the plans whose
body has this task only, deletion of this task from a
plan which has more than one element in the body
part.
• Addition/deletion of a goal to an existing SR model:
Addition: 1) If the new goal is a top-level goal and
there are tasks or goals connected to it by means-
ends links then adds a plan to set of plans. 2) If
the new goal is connected to a parent task node by
task-decomposition link, then add this goal into the
body part of the plan whose head is the parent task
node. Deletion: 1) If this goal is a top level goal and
there are some subnodes connected to it - delete the
plan whose head is this goal. 2) If this goal is con-
nected to a parent task by task decomposition link,
then delete this goal from the body part of that plan
whose head is the parent task, and if this goal is the
only decomposition element of that task, delete the
whole plan.
• Addition/deletion of a softgoal to an existing SR
and SD model: Addition: Modify the option se-
lection function S
O
of the plan by adding this new
softgoal as another criterion. Deletion: Delete
those belief formulas that is relevant to this soft-
Actions
Supply(Agreements).
RequestPerform(EnterAvailDates).
Plans
+task(ParticipateInMeeting):True < −
!task(AttendMeeting), !task(ArrangeMeeting).
+task(AttendMeeting): True < − .
+task(ArrangeMeeting): True < −
!goal(AgreeableDate).
+goal(AgreeableDate): True < −
!task(FindAgreeableDateByTalkingToInitiator).
+task(FindAgreeableDateUsingScheduler): True
< − RequestPerform(EnterAvailDates).
+task(FindAgreeableDateByTalkingToInitiator):
True < − .
+task(AgreeToDate): True < −
Supply(Agreement).
Figure 5: AgentSpeak(L) plans for Meeting Participant
Agent.
goal and modify the plan by taking out this softgoal
criteria.
• Addition/deletion of a dependency to an existing SR
model: There are three kinds of dependencies in
i* model: task dependency, goal dependency and
resource dependency. Changes of a dependency
may bring changes to two involved agents. For ad-
dition, we need to find out the dependee and de-
pender and which element of them needs this de-
pendency or could provide this dependency. Then
for the dependee and depender, just add tasks of
the form RequestResource()/Supply(), RequestPer-
form() or RequestAchieve() depending on whether
it is a resource, action or a goal. Deletion of a de-
pendency is just a reverse action to the addition.
• Addition of an actor to an existing i* diagram:
This will lead to a new agent program for the ac-
tor. In the instance of each internal (SR) element
for the actor, the steps outlined above are followed.
The same applies for any dependencies that this ac-
tor might participate in.
We shall now discuss the second area where we are
able to localize the impact of changes of AgentS-
peak(L) agents to i* model. Before doing this, we
need to specify the translation rules for mapping a
AgentSpeak(L) program to an i* model. This is an op-
posite process to those translation rules that we have
ICEIS 2006 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
424

described in the previous section. To reflect the re-
finement of a AgentSpeak(L) program to i* model,
we give another five informal mapping rules as fol-
lows:
• Addition/deletion of an AgentSpeak(L) agent: Ad-
dition: Add an actor in SD and SR models. Dele-
tion: Delete the actor in SD and SR models and
also delete all the dependency links connected to it
from other actors.
• Addition/deletion of a goal or task clause in
AgentSpeak(L) plan: Addition: Add a goal node or
task node with the same name in the actor bound-
ary. A goal or task cannot be added without con-
necting or being connected with other nodes. All
the links associated with the added goal or task
node will use mapping rules defined below to be
added into i* model. Deletion: Delete correspond-
ing goal or task node from that actor boundary and
all the nodes that are subnodes of it. Delete links
between them as well.
• Addition/deletion of a plan: Addition: If the head
of the plan is a goal clause, then add a set of means-
end links; If head of the rule is a task clause, then
add a set of task-decomposition links. The child
nodes are those clauses in the body part of the rule.
Deletion: Delete a set of means-end links or task-
decomposition links from that actor which have the
same parent node and that parent node is the head
of the deleted rule. After deleting those links, if
there is no link connected to the parent node, then
delete the parent node from that actor boundary.
• Addition/deletion of a dependency rule: Addition:
If goal, task or resource dependency rules are added
into AgentSpeak(L) plans, then corresponding ac-
tors T
o
(Depender) and T
d
(Dependee) in SD model
and SR model needs to be modified to show the
reflection of these additions. If T
d
has a Re-
questAchieve(), RequestPerform() or a RequestRe-
source()/Supply() then these have to be depicted in
T
o
also showing the dependencies on goal, task and
resources. Deletion: The reflection to i* model
is the deletion of a goal-dependency or a task-
dependency or a resource-dependency from SD
model and SR model.
• Addition/deletion of a softgoal: Addition: If a soft-
goal is added into the option selection function then
corresponding SD model and SR models need to
be modified to show the reflection of this addition.
Deletion: The reflection to i* model is the deletion
of a softgoal from SD model and SR model.
Applying the above set of reverse mapping rules we
can see how changes in AgentSpeak(L) programs can
be reflected into the i* model thereby test a wide range
of properties of the application.
6 CONCLUSION
In this paper we have discussed how the co-evolution
of agent technology with i* model can be used to ex-
plore the implication configuring agent based applica-
tions. We can analyze the system behavior using real-
life example which is otherwise not possible by only
looking at the i* model and AgentSpeak(L) agents
separately. The i* specification of a software system
is easily understandable and by mapping it directly
into AgentSpeak(L) agents we can get a MAS which
is directly executable. We have also defined the re-
verse mapping rules from AgentSpeak(L) to i* which
also serves as a guide for generating prototypes of
complex systems.Using this technique one can spec-
ify requirements, define architecture, model behavior
as well as do simulation.
This approach makes use of the advantages of i* for
the early-phase of requirement engineering and val-
idates the model by mapping it into an executable
specification to see the design result in an emulation
program. We are currently working towards enhanc-
ing and automating the OME tool as mentioned in
(Salim et al., 2005).
REFERENCES
Bordini, R. H., Hbner, J. F., and et. al. (2005). Ja-
son: A Java-based AgentSpeak interpreter used
with SACI for multi-agent distribution over the net.
http://jason.sourceforge.net/, 0.6 version edition.
Chung, L., Nixon, B. A., Yu, E., and Mylopoulos, J. (2005).
Towards executable specifications: Combining i* and
agentspeak(l). In Software Engineering and Knowl-
edge Engineering Conference, Taiwan.
Fuxman, A., Kazhamiakin, R., Pistore, M., and Roveri, M.
(2003). Formal tropos: language and semantics.
Rao, A. (1996). Agentspeak(l): Bdi agents speak out in
a logical computable language. In Agents Breaking
Away: Proceedings of the 7th European WS on Mod-
elling Autonomous Agents in a Multi-Agent World.
Springer- Verlag: Heidelberg,Germany.
Salim, F., Chang, C. F., Krishna, A., and Ghose, A. K.
(2005). Towards executable specifications: Combin-
ing i* and agentspeak(l). In Software Engineering and
Knowledge Engineering Conference, Taiwan.
Simon, H. (2005). The Science of the Artificial. The MIT
Press, Cambridge, MA, 2nd edition.
Yu, E. (1995). Modelling strategic relationships for process
reengineering, Phd. Thesis. University of Toronto,
Canada.
Yu, E. (1997). Towards modelling and reasoning support for
early-phase requirements engineering. In Proceedings
of the 3rd IEEE Int. Symp. on Requirements Engineer-
ing.
HYBRID MODELING USING i* AND AGENTSPEAK(L) AGENTS IN AGENT ORIENTED SOFTWARE
ENGINEERING
425
