
AOPOA
Organizational Approach for Agent Oriented Programming
Enrique González, Miguel Torres
Grupo de Investigación SIDRe, Pontificia Universidad Javeriana,Bogotá, Colombia
Keywords: Agent-Oriented Programming, Agent Design Methodology, MultiAgent Systems.
Abstract: This paper presents AOPOA, an agent oriented programming methodology based in an organizational
approach. The resulting multiagent system is composed by a set of active entities that aim to accomplish a
well-defined set of goals. This approach allows to design complex systems by decomposing them into
simpler ones. The organizational approach makes it easier to perform an iterative and recursive
decomposition based in the concept of goal; and at the same time to identify the interactions between the
entities composing the system; at each iteration an organization level is developed. During the analysis
phase, tasks and roles are detected. During the design phase, the interactions are characterized and managed
by means of cooperation protocols. At the final iteration, the role parameterization is performed, which
allows to specify the events and actions associated to each agent. Finally, the deploy of the agent instances
is determined allowing redundancy to achieve the requirements of the system.
1 INTRODUCTION
The rational agent concept appeared in AI as a new
conceptual and practical approach for designing and
building intelligent systems. Rational agents are seen
as units acting to attain a set of well-defined goals.
In a more general approach, an agent appears as
entity encapsulating data, knowledge and behaviour,
capable to perform a task in an autonomous and
proactive way. Normally, agents do not work alone,
but form groups to attain global goals, which can not
be achieved by one agent alone; this group of
cooperating agents form a MultiAgent System
(MAS). MAS have appeared as a new way to build
systems that solve complex problems.
Building a MAS implies a different vision of the
design process, it must include and take advantage
of the agent’s intrinsic characteristics. A potential
advantage in applying the Agent Oriented
Programming (AOP) paradigm is that it facilitates
the development of complex applications. This
design approach is well-suited to subdivide a
complex problem into simpler ones, which are
solved by active entities, the agents; besides, it
offers the possibility to design a modular solution
that allows a more structured and coherent
management of global system complexity. However,
it is clear that when dividing the system, there are
multiple problems to solve to get the agents to work
together in a cooperative way in order to fulfil the
system’s goals. Thus, AOP must provide methods
not only to assign responsibilities to agents, but also
to identify and manage the interactions between
them.
The development of methodologies to perform in
an efficient way the analysis and design of an agent
based system is a research field still open; even if
there are some already proposed alternatives. This
paper presents AOPOA, an AOP methodology based
on an organizational approach. In this approach, a
MAS is perceived as an organization. As in other
previous approaches, complexity management is
attained through an organizational decomposition of
the system in simpler parts. The key point of the
approach of AOPOA is that at the same time agents
are designed in a structured and progressive way,
relationships between them are automatically
established and characterized.
75
González E. and Torres M. (2006).
AOPOA - Organizational Approach for Agent Oriented Programming.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - SAIC, pages 75-80
DOI: 10.5220/0002453500750080
Copyright
c
SciTePress

2 AOP METHODOLOGIES
The problem of building a system based on an AOP
methodologies has already been studied
(Wooldridge M. 2000) (Alonso F. 2004). In the
development process of AOPOA some existing
methodologies were taken into account, and they
were analyzed to find the more relevant
characteristics that a good methodology must posses.
There are a great variety of methodologies for
designing Multiagent Systems, some of them are
extensions or are based in other design models or
methodologies, inheriting its benefits and its
failures. Alonso et.al (Alonso F. 2004) proposed a
taxonomy to organize such methodologies in three
categories: methodologies based upon the Object
Oriented paradigm; methodologies based on Agents
itself; methodologies based on Knowledge
Engineering.
The methodologies based upon the Object
Oriented Software paradigm have certain problems
such as a generic analysis model, and most of them
do not cover the social structure of the system and
the environment characteristics. Under these
methodologies the agent is a complex object,
reducing the level of real abstraction provided for
agents. Such methodologies also use some models
and views (i.e. UML diagrams) and some of the
techniques proposed in Software Engineering
common processes.
The methodologies based on Agents are based
upon abstraction of social levels such as groups and
organizations. These methodologies are strong in the
first steps of the specification and design level of the
MAS, but as in the previous methodology they lack
of a generic analysis model which can be used to
assess if any given MAS approximation is
appropriate for the given problem. These
methodologies also present different levels of
abstraction of the MAS such as: the internal
structure of the agents, the structure of the
interactions among agents, and the social structure
of the different groups of agents.
Finally, the methodologies based on Knowledge
Engineering are characterized by the identification,
acquisition and modeling of the knowledge used by
the agents in the MAS. The most representative
methodologies of this category are extensions of the
CommonKADS (Schreiber G. 1999) methodology
for developing Knowledge Based Systems. For
instance, MASCommonKADS also appropriates
some object oriented design and analysis techniques.
In next paragraph some of the most relevant MAS
methodologies are presented.
Tropos is an agent oriented methodology
(Penserini, L. 2004), is based upon two basic
concepts: the notion of an agent who uses plans in
order to fulfill goals and the covering of the early
and late requirements analysis. Prometheus
(Padgham, L. 2002) is detailed and complete, and
covers all the steps since the requirement analysis
process until the MAS implementation using the
JACK framework (Howden N. 2001). Odell presents
a methodology based on the object oriented software
paradigm, and it uses as a basis the UML diagrams
for the MAS representation (Odell J. 2004); using
Metamodels in order to describe the MAS, and its
elements. GAIA (Wooldridge M. 2000) is another
object oriented based methodology, which uses the
initial concept of organization and sub organization,
modeling of the environment of the MAS, role
modeling and interaction model among roles. GAIA
does not present particular techniques for
implementation or for requirements elicitation.
MASE is a MAS development methodology
(DeLoach S. 2000), which goes from initial
specification until the actual implementation of the
MAS. The process of capturing goals produces a
goal hierarchy that is used to also identify Use
Cases; which are then used to generate sequence
diagrams among roles.
To summarize, the fundamental characteristics in
the development of a methodology are: to identify
the goals that must be attained in order to solve the
problem; to assigning them to roles, which will
perform the necessary tasks to achieve the
objectives; and then, to establish the social aspects,
such as interaction and cooperation mechanisms
required to get the desired social behaviour; finally,
the assignation of the roles to the agents which will
conform the system. In order to achieve this process,
there are different alternatives, as has been shown.
3 MULTIAGENT SYSTEMS
An agent can be defined as an entity that perceives
its surrounding environment through sensors, and
which also responds or acts in that environment
through effectors (Rusell N. 2003). Agents respond
to events coming from the environment or from
other agents; agents select the most adequate action
that leads the agent to achieve its own goals.
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
76

A MultiAgent System (MAS) is a set of organized
agents; they interact in a cooperative way to reach in
a collective way the global goals of the system
(Ferber J. 1999). A MAS can be viewed as a
organization of agents in which interactions are the
origin and product of the system’s persistence and
dynamics through time. Cooperation is an important
issue in agent interactions, and it is composed by
three characteristic elements: collaboration,
coordination and conflict resolution. Collaboration is
required when the agent’s abilities and resources are
not enough for the agent to accomplish goals.
Coordination is related to the order in which the
system’s tasks must be performed. When resource
conflicts arise, they must be solved; usually agents
have to negotiate or to apply rules that will impose
certain social restrictions. Finally, agent
communication is the support for cooperation. In
practice, any cooperation technique can be modelled
by an interaction protocol, which defines an ordered
set of communication acts between the implicated
agents.
In a MAS, a role makes reference to an abstract
entity, whose function is to achieve a set of goals; in
other words, a role defines a set of tasks. The
accomplishment of such a task depends on the
abilities, resources and bindings between the entity,
its environment and other roles. The objective then
is to build an efficient system, in which the abilities
and resources of a role are as different as possible
from others, in order to avoid redundancy of abilities
and reduce resource conflicts.
An organization is an array of relationships among
individuals; that can be perceived as a single unit or
system. The organizational structure is defined in an
abstract way by a set of roles, which can be assumed
by instantiated agents, and a set of relationships
between such roles. Each organization can be
perceived as a set of organizations; each of them can
be decomposed in a recursive way into lower-level
organizations.
4 GOAL DECOMPOSITION
In the AOPOA methodology, there are two main
processes: analysis and design; each one of them is
applied iteratively until it is determined that it is no
longer necessary to decompose the goals and roles
already identified. Based on these organizational
perspective, the system is viewed as an organization
that can be recursively divided. In each iteration, the
analysis of an organizational level is performed. In
this way, a MAS can be modelled as an
organizational tree, where the root node represents
the whole system, child nodes represent progressive
role decompositions, and leaf nodes represent final
roles that can be instantiated as the agents of the
functional system. The iterative process of recursive
decomposition ends when it is considered that the
complexity of all the final roles is low enough. Once
this point is reached, a final iteration is performed, to
make the detailed design of the agents that will
represent the existing roles in the final system.
The key concept for identifying a role is the
association of an autonomous entity to a set of goals.
In AOPOA, the notion of goal is the foundation,
which allows the decomposition process of a
complex role into simpler ones. In fact, this sub-role
generation process implies two activities:
- decomposition of the associated goals of a role
into simpler ones.
- grouping this new sub-goals to create new less
complex roles.
The process begins by modelling the MAS as a
single first level unique role. The first role’s goals
and environment interactions are derived directly
from the requirements that where identified for the
entire system. This general system’s goals must be
divided into sub-goals, which can be assigned to less
complex derived roles.
Another AOPOA key concept is the use of the
notion of interaction. Two agents interact when they
join efforts and abilities to reach a goal; or when
they have to synchronize its activities; or when
agents share resources during the execution of a
task. Every interaction is represented by an abstract
relationship, between the involved roles, called
cooperation bind. During the iterative decomposition
phase, the identification of interactions by goals is
performed directly. Every time a complex goal is
divided, if some of the resulting roles include a sub-
goal of the former one, these roles will probably
need to interact in order reach the complex goal.
Also through the decomposition, the identification of
the resources required by the new derived roles is
performed; when a shared resource is detected, the
implicated roles will probably need to interact.
As can be observed, different cooperation binds
automatically arise because of the potential
interactions that can appear between roles.
AOPOA - Organizational Approach for Agent Oriented Programming
77
During the design phase, every cooperation bind is
analysed; depending in the type of interaction, an
adequate cooperation technique can be chosen. As
was previously explained, the implementation of a
cooperation technique is made through an
interaction protocol. In summary, from the bind
identification, it is possible to determine, in a
structured way, the adequate sequence of
interchanged messages between agents.
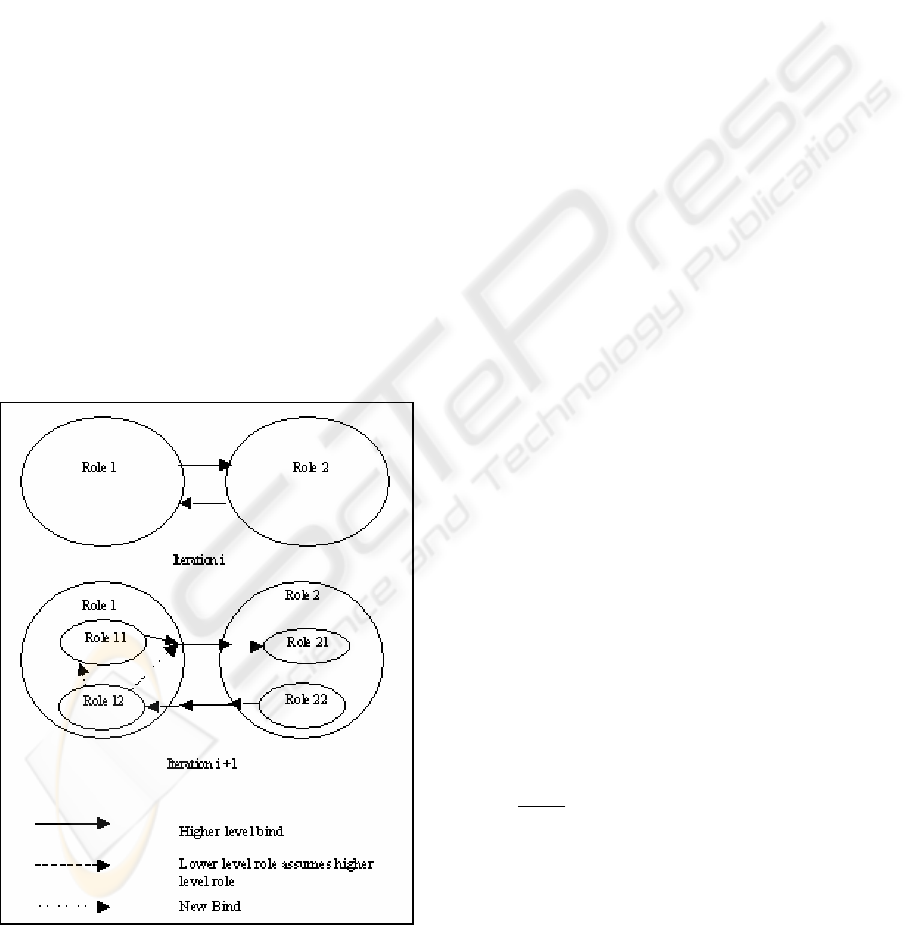
An important characteristic of cooperation binds is
that through the role decomposition, the associated
binds of a role are inherited by the resulting sub-
roles. In fact, the binds existing between roles in an
organizational level should be assumed by the sub-
roles in the next organizational level. Figure 1
illustrates the previous concepts; The roles are
represented as circles, and binds among them are
arrows. In iteration i there are two identified roles. In
iteration i+1 the sub-roles are included inside the
roles identified in the previous level. In iteration i
only two binds where identified, and in iteration i+1
those binds remain and are extended to some of the
new sub-roles. New interactions among roles in the
same organizational level can also appear, for
instance the bind between roles 11 and 12.
Figure 1: Inheritance of cooperation binds.
5 AOPOA PHASES
Requirements are the basis upon which the system’s
general goals are identified. Once the problem is
well understood, it is examined in order to decide if
an agent-oriented approach is well-suited for the
problem at hand.
5.1 Analyse Phase
In the first iteration, the general objectives of the
system are analysed and divided. In each iteration,
tasks are defined for each goal to reach; a task is
characterized by the set of resources and abilities
required to attain the goal. Based on these tasks, a
grouping process is performed to determine the ideal
set of required roles; each group of tasks is
assimilated to a new role. Notice that only the tasks
derived from a role are grouped to obtain its
corresponding sub-roles; as a consequence, the
grouping procedure is applied to small sets of tasks.
The grouping process aims to qualify and group
tasks applying three different criteria:
- No opposite roles are assigned to the same role.
- There are few resource conflicts among the new
generated roles.
- The presence of abilities’ redundancy should be
reduced among roles.
The procedure to find the evaluate a generated
grouping is as follows:
1. Assign tasks in a way that a set of groups NG can
be produced. Each group of tasks represents a
possible candidate role to create. NG is the total
number of groups identified.
2. Evaluate the criteria for each group of tasks. The
applied criteria for a group g are: Aog, Ahg and Arg;
which respectively measure the criteria for goals,
abilities and resources. In order to perform this
evaluation equation 1 is applied.
N
NI
A
jg
jg
jg
=
(Eq. 1)
Ajg is the classification value of the indicator for a
criteria j for the evaluated group of tasks g; j can
have the values: h, o and r; g is the identifier of the
group that is being evaluated, and its value ranges
from 1 to NG.
NIjg is the number of intersections of type j; if j=o
the amount of goals of the different type in group g,
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
78
if j=h the quantity of redundant abilities that are
present in other groups; if j=r the required shared
resources that are present in other groups of tasks.
Njg is the total number of elements of type j inside
group g, i.e. objectives, abilities and resources inside
the group of tasks included in g.
3. Calculate an average Pj for each criteria j by
using equation 2.
∑
=
=
G
g
jgj
A
NG
P
1
*
1
(Eq. 2)
4. Calculate a weighted sum of Po, Ph, and Pr.
An optimisation technique is used to find the
grouping with minimum evaluation value. This
process is not to long, as only few tasks are
considered at the same time. Finally, in order to stop
the decomposition procedure, an evaluation of the
complexity associated to each new role is
performed.
5.2 Design Phase
For each iteration, once the roles have been
identified during the analysis phase, the design
phase starts, and cooperative binds among roles are
identified. Once binds are identified, they are
characterized as interaction situations were the
coordination, collaboration and conflict resolution
techniques are present. For each identified
interaction the most suitable method must be
applied. It is open for the developer to use already
available methods and protocols or its own ones.
Finally, the selected protocols are translated into
communication binds.
5.3 Final Iteration
Once the analysis of complexity of the roles shows
that there is no need for any new division of roles,
then the final iteration of the AOPOA methodology
is applied. In this last iteration, the set of resulting
leave roles in the last level of the branches in the
organizational tree is parameterized, thus obtaining
the agent prototypes. A prototype of an agent has a
specification of goals, sensorial inputs, effector
outputs on the environment, and a definition of the
actions that the agent can perform. Once the agents
are specified, the events that trigger the actions
performed by the agent must be analysed, also the
mental abilities to execute these actions are
specified. Events can be perceptions from the
external elements in the environment or messages
received associated to the interaction communication
protocols. For each incoming event, the actions that
must be taken must be determined.
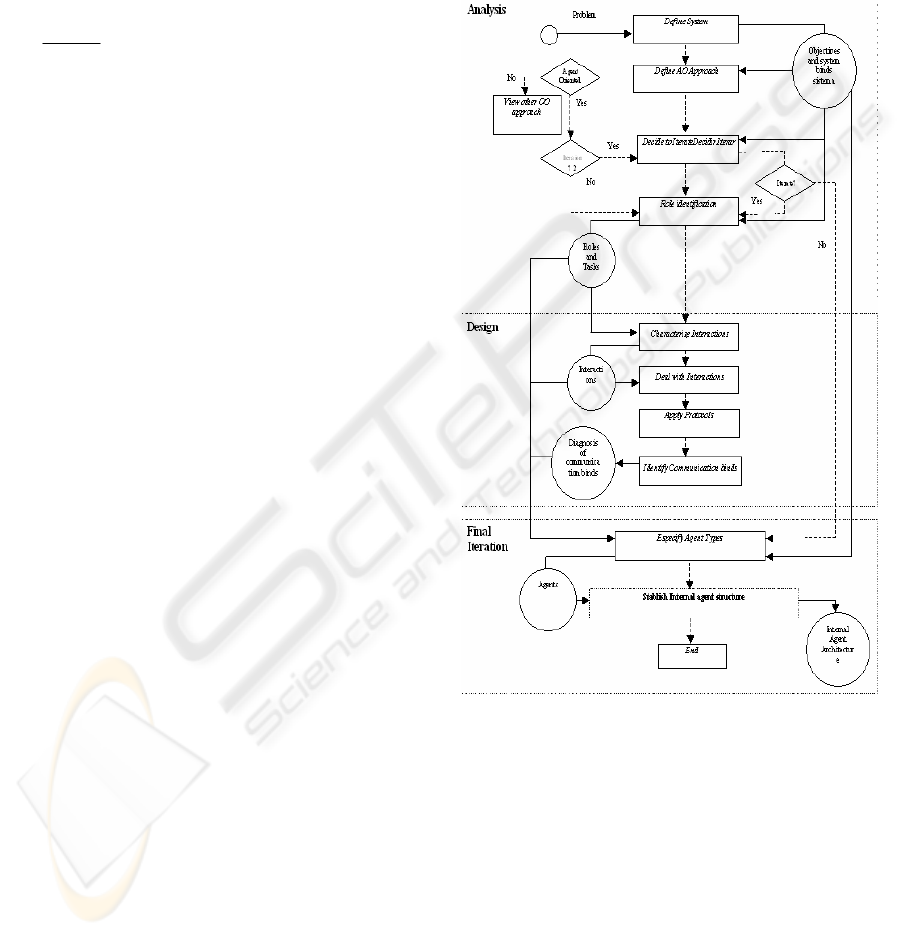
In Figure 2 the complete process is depicted, the
stages of the AOPOA methodology are shown.
Circles in the diagram represent artefacts generated
during this process.
Figure 2: Phases of the AOPOA methodology.
6 DISCUSSION
The identified advantages of using AOPOA are:
- The organizational approach helps to deal with
the system complexity and also to divide the
problem in smaller ones with well-defined
relationships.
- The grouping procedure aims to find a good
combination of task groups, in order to optimize the
role generation process.
AOPOA - Organizational Approach for Agent Oriented Programming
79

· The process is complete, since considers all the
required aspects to develop a good MAS; starting
with requirements elicitation until defining the
communication protocols and agent instances.
The selected case of study to test the AOPOA
methodology, was a based on the construction of a
restaurant simulation. The case of study also
provided a way to test the methodology’s
organizational, intra-agent and intra-organizational
scalability. Organizational scalability implies that a
system can be designed to be part of a greater
system, i.e. a restaurant can be part of a food chain.
Intra-agent scalability, means that new objectives
can be added to an already existent agent role.
Finally, intra-organizational scalability allows to
aggregate new roles to different organization’s
levels, over an already existent system. A detailed
explanation of the case of study is out of the scope
of this paper.
In order to implement the case of study, the BESA
agent framework was used (González E. 2003). The
AOPOA model transformation into a BESA
implementation was direct and fast. The AOPOA
model allows a rapid and robust event and action
implementation of the MAS. A detailed presentation
of the restaurant simulator design using AOPOA and
implementation using BESA can be found in the
work of Ahogado and Reinemer (Ahogado D. 2003).
Actual work to extend the AOPOA methodology
include:
The use of dynamic roles, as a mechanism for
agents to perform different roles accordingly to its
own objectives and situation.
Agents mobility, applied for dynamic agents who
can migrate through different machines in a
distributed system.
Taking into account the obtained results, it can be
concluded that AOPOA is a good choice for
constructing complex agent based systems. In fact,
the obtained advantages are derived from the
cooperative rational agent concepts used, allowing a
higher semantic level of the system and its
conforming entities.
REFERENCES
Ferber J., 1999. "Multiagent Systems: An Introduction to
Distributed Artificial Intelligence", Addison – Wesley
Longman. 1ra. Ed., 1999.
Rusell N., 2003. “Artificial Itelligence: A Modern
Approach”, 2
nd
Edition, Pearson Education.
Ahogado D., Reinemer A.M., 2003. “Programación
Orientada a Agentes: Metodologías de Desarrollo de
Software”, Proyecto de Grado Carrera de Ingeniería de
Sistemas, Universidad Javeriana Bogotá.
González E., Bustacara C., Avila J., 2003. “BESA:
Behavior- oriented, Event-driven Social-based Agent
framework.”. PDPTA’03, Las Vegas-USA, CSREA
Press, vol. 3, Junio 2003, pp 1033-1039.
Alonso, F., et.al., 2004. Sonia: A methodology for natural
agent development. ESAW’2004 - 5th Intl.Workshop
on Engineering in the AgentsWorld
Wooldridge M., Jennings N., Kinny d., The GAIA
Methodology for Agent-Oriented Analysis and
Design, Autonomous Agents and Multi-Agent
Systems, vol. 3, pp. 285-312, Kluwer Academic
Publishers, 2000.
DeLoach, S. A. and Wood, M. F. 2000. Multiagent
systems engineering: the analysis phase. Technical
Report AFIT/EN-TR-00-02, Air Force Institute of
Technology.
Odell, J., Nodine, M. H., and Levy, R. 2004. A metamodel
for agents, roles, and groups. In AOSE, pages 78–92.
Howden, N., Rönnquist, R., Hodgson, A. and Lucas, A.
2001. JACK Intelligent Agents – Summary of an
Agent Infrastructure. The agent oriented software
group (www.agt-software.com.au).
Padgham, L. and Winikoff, M. 2002. Prometheus: A
methodology for developing intelligent agents. In
Proceedings of the Third International Workshop on
AgentOriented Software Engineering, Bologna - Italy.
AMMAS.
Penserini, L.; Kolp, M.; Spalazzi, L.; Panti, M. 2004.
Socially-based design meets agent capabilities.
Proceedings of the IEEE/WIC/ACM International
Conference on Intelligent Agent Technology
(IAT’04).
Schreiber, G., Akkermans, H., Anjewierden, A., de Hoog,
R., Shadbolt, N., Velde, W. V. D., and Wielinga, B.
1999. Knowlede Engineering and Management: The
CommonKADS Methodology. MIT Press.
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
80
