
CLIENT SYNTHESIS FOR WEB SERVICES BY WAY OF A TIMED
SEMANTICS
Serge Haddad
LAMSADE, Université Paris Dauphine
Place du Maréchal de Lattre de Tassigny, 75775 Paris Cedex 16, FRANCE
Patrice Moreaux
LISTIC-ESIA, Université de Savoie
Domaine universitaire d’Annecy le vieux, BP 806, 74016 Annecy Cedex, FRANCE
Sylvain Rampacek
CReSTIC, Université de Reims Champagne-Ardenne
UFR Sciences de Reims, BP 1039, 51687 Reims Cedex 02, FRANCE
Keywords:
Web Services, BPEL4WS, Algebra of timed processes, Timed Automata.
Abstract:
A complex Web service described with languages like BPEL4WS, consists of an executable process and its ob-
servable behaviour (called an abstract process) based on the messages exchanged with the client. The abstract
process behaviour is non deterministic due to the internal choices during the service execution. Furthermore
the specification often includes timing constraints which must be taken into account by the client. Thus given
a service specification, we identify the synthesis of a client as a key issue for the development of Web services.
To this end, we propose an approach based on (dense) timed automata to first describe the observable service
behaviour and then to build correct interacting clients when possible. The present work extends a previous
discrete time approach and overcomes its limitations.
1 INTRODUCTION
From elementary Web services to complex ones
Web services are “self contained, self-describing
modular applications that can be published, located,
and invoked across the Web” (Tidwell, 2000). They
are based on a set of independent open platform stan-
dards to reach a high level of acceptance. Web ser-
vices framework is divided into three areas: commu-
nication protocol, service discovery and service de-
scription. The “Web Services Description Language”
(WSDL) (WSDL, 2001) provides a formal, computer-
readable description of Web services. Such a de-
scription specifies the software component interfaces
listing the collection of operations that are network
accessible through standard XML messaging. It in-
cludes all information that an application needs to
invoke such as the message structure, the response
structure and some binding information like the trans-
port protocol, the port address, etc. However sim-
ple operation invocation is not sufficient for some
kind of composite services. They require in addi-
tion a long-running interaction derived by an explicit
process model. This kind of services may often be
encountered in two cases. First when a Web service is
developed, it is composed by a set of accessible oper-
ations and a process model which schedules the invo-
cation to a correct use of the service. Secondly, fac-
ing to the capability limits of Web services, composite
services may be obtained by aggregating existing Web
services in order to create more sophisticated services
(and this in a recursive way). In order to deal with the
behavioural aspects of complex services, some indus-
trial and academic specifications languages have been
introduced. Among them, “Business Process Execu-
tion Language for Web Services” (BPEL4WS or more
succinctly BPEL) has been proposed by leading ac-
tors of industry (BEA, IBM, and Microsoft) and has
quickly become a standard (Andrews et al., 2003).
The two facets of complex Web services BPEL
supports two different types of business processes -
see for instance (Juric, 2005), (Juric et al., 2005):
• Executable processes specify the exact details of
business processes. They can be executed by an
orchestration engine.
19
Haddad S., Moreaux P. and Rampacek S. (2006).
CLIENT SYNTHESIS FOR WEB SERVICES BY WAY OF A TIMED SEMANTICS.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - SAIC, pages 19-26
DOI: 10.5220/0002460700190026
Copyright
c
SciTePress

• Abstract business protocols specify the public mes-
sage exchange between the client and the service.
They do not include the internal details of process
flows but are required in order for the client to cor-
rectly interact with the service.
Given the description of an executable process, its
associated interaction protocol is obtained by an ab-
straction mechanism (which masks all the internal op-
erations of the service). However the issues raised
by these two types of processes are very different. A
specification of an executable process is close to the
definition of a program whereas the specification of
interaction protocol mainly raises an difficult prob-
lem: how to synthetize a client which will correctly
handle the interaction with the service.
The synthesis problem Indeed by construction, the
external behaviour of a service is non deterministic
due to its internal choices. It is then a priori unclear
whether a client, i.e. a deterministic program, can be
designed to interact with it. Furthermore the spec-
ification often includes timing constraints (e.g. im-
plicit detection of the withdrawal of an interaction
by the client) implying that these timing constraints
must also be taken into account by the client. How-
ever since no semantics of the interaction process is
given for BPEL (not to be confused with the seman-
tics of the service execution), this problem could not
be formally stated.
A discrete time solution (Melliti and Haddad,
2003; Haddad et al., 2004b) In this work, the au-
thors have specified what is an external behaviour, i.e.
they have given an operational semantics to an ab-
stract BPEL specification in terms of a discrete time
transition system. The semantics is obtained by a set
of rules in a modular way. Given a constructor of the
language and the behaviour of some components, a
rule specifies a possible transition of a service built
via this constructor applied on these components. As
previously discussed, the transition system is gener-
ally non deterministic.
Then they have defined a relation between two
communicating systems which formalizes the concept
of a correct interaction. There are standard relations
between dynamic systems like the language equiva-
lence and the bisimulation equivalence but none of
them matches their needs. Thus they have intro-
duced the interaction relation which can be viewed
as a bisimulation relation modified in order to capture
the nature of the events (i.e. the sending of a message
is an action whereas the reception is a reaction).
Afterwards they have focused on the synthesis of
a client which is in an interaction relation with the
transition system corresponding to the system. The
client they look for must be implementable, in other
words it should be a deterministic automaton. It has
appeared that some BPEL specifications do not ad-
mit such a client i.e. they are inherently ambiguous.
Thus the algorithm they have developed either detects
the ambiguity of the Web service or generates a deter-
ministic automaton satisfying the interaction relation.
The core of this algorithm is a kind of determinisation
of the transition system of the service.
Our present contribution In the previous solution,
the discrete time semantics is preferred for simplic-
ity reasons. However such a solution has the follow-
ing drawbacks. First, the passing of a unit of time
is modelled by an explicit transition in the transition
system which means that the compact representation
of timing constraints by values is now hidden in the
model by their combination with logical transitions.
In other words, whereas handling correctly the inter-
action with the service, the client automaton is hardly
understandable by a user. Moreover if two timing
constraints are not of the same order, the time unit
must be chosen w.r.t. the shorter one leading to a
combinatory explosion of the automaton due to the
“translation” of the longer one.
Here we develop a dense time semantics for a
BPEL specification as a timed automaton (Alur and
Dill, 1994). A preliminary version of this seman-
tics for XLANG (Thatte, 2001) was given in (Haddad
et al., 2004a). Switching from XLANG to BPEL is
relatively easy thanks to the way the operational se-
mantics is defined. The construction of this automa-
ton is based on modular rules which works similarly
to the discrete case. However they are more intri-
cate since, on the one hand, the values of the timing
constraints are handled symbolically with the help of
clocks and, on the other hand, given some expression
we must determine which clocks are active and how
they govern the guards of the transitions. Next, we
revisit the interaction relation. Contrary to the previ-
ous relation, we manage explicitly the time since now
an execution is a discrete event sequence where the
events are stamped by the time of their occurrence.
The last part of the work is the most difficult one. Let
us recall that the core of the former synthesis algo-
rithm for the client automaton is similar to an automa-
ton determinisation. It is well-known that the non de-
terministic timed automata are strictly more expres-
sive than the deterministic ones. Thus we have de-
signed an original procedure which decides whether
a specification is (potentially) ambiguous and in the
negative case produces such a deterministic automa-
ton. Similarly to the approaches which determinise
subclasses of timed automata (Alur et al., 1999), we
require that the deterministic automaton has the same
clocks as those of the original one.
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
20

Related work The platform WSAT (Fu et al.,
2004a; Fu et al., 2004b) enables designers of a Web
service composition to model check properties ex-
pressed by LTL formulas with SPIN tool. The for-
mal semantics is obtained by gluing patterns for each
BPEL construction. One pattern is connected from its
final state to the initial state of next pattern according
to the BPEL description with local transitions. This
work does not cover the time features and it focuses
only on message exchanges: the conversation is ob-
tained by a virtual watcher that is supposed to record
all messages sequences sent by each peer enrolled in
the composition.
Another research of Web services formal semantics
is based on a BPEL to Finite State Processes (FSP)
translation (Foster et al., 2003). This work lies on
message sequence charts and the core of the verifica-
tion mechanism consists to check trace equivalence.
Again, the time features of the specification are not
taken into account.
(Turner, 2005) uses the notation CRESS (Chisel
Representation Employing Systematic Specification)
to formalise Web services. This model presents two
main advantages: automatic translation into formal
languages for analysis as well as into implementation
languages for deployment. Then the CRESS speci-
fication is translated into LOTOS and analysed with
tools like TOPO, LOLA and CADP. Again, the tem-
poral aspects are not present.
These different contributions share with our ap-
proach the design of a formal semantics for Web
services. However they study the BPEL execution
process and not the interaction protocol, they do not
include the time features of BPEL and they perform
component verification whereas we perform compo-
nent synthesis.
Organization of the paper In section 2, we de-
scribe how to associate a formal semantics with a
business process leading to the building of a timed
automaton. Section 3 presents the client-service inter-
action relation. The synthesis of a client automaton is
described in section 4. We summarize our results in
section 5 and we present some directions for future
works.
2 A FORMAL SEMANTICS FOR
BPEL ABSTRACT PROCESSES
BPEL provides a set of operators describing in a
modular way the observable behaviour of an abstract
process. As shown in (Staab et al., 2003), this kind
of process description is close to the process alge-
bra paradigm illustrated for instance by CCS (Mil-
ner, 1989), CSP (Hoare, 1985) and ACP (Bergstra
and Klop, 1984). However, time is explicitly present
in some of the BPEL constructors and thus the stan-
dard process algebra semantics are inappropriate for
the semantics of such a process.
Thus our semantics associates a timed automaton
(TA) with an abstract process. Let us briefly de-
scribe what is a TA. A TA is a (non deterministic)
finite automaton enhanced with a finite set of clocks
(C). An execution of a TA consists of (possibly null)
time steps interleaved with discrete transitions. A TA
configuration is composed of a state and a value per
clock (called a clock valuation). The discrete tran-
sitions correspond to the edges between the states.
The clocks control the behaviour of the TA as fol-
lows. An elementary constraint about a clock x,is
x<v, x ≤ v,x>v, x ≥ v where v is an integer
constant. A constraint is a conjunction of elementary
constraints. The set of constraints is denoted Γ.A
constraint called an invariant is attached to each state.
Time can elapse in a state if the invariant associated
with the state is satisfied during all the successive con-
figurations. In addition to its label, the specification of
an edge also includes a constraint, here called a guard,
and a subset of clocks to be reset. In order to fol-
low this edge from a configuration, the corresponding
guard must be true and the clock valuation after the
reset operation must satisfy the invariant of the new
state.
Definition 1 (Timed automaton
(Alur and Dill, 1994))
A Timed Automaton (TA) is a tuple T =
(L, C, A, Inv, E, l
0
) where
• L is the set of locations or control states,
• C is the set of clocks,
• A is the set of actions,
• Inv a mapping from L to Γ defines the invariants,
• E ⊆ L × Γ × A × 2
C
× L is the set of edges.An
edge e is (s, g, a, r, d) with s the source location, g
the guard of e, a the action, r the subset of clocks
reset by e and d the destination location.
• l
0
is the initial location.
2.1 The Alphabet of the TA
The first step for the defining a semantics consists in
specifying the action alphabet for a BPEL process.
We have four kinds of actions:
• Silent actions, denoted by τ cannot be observed
by the client. They correspond to decisions taken
by the server (evaluation of a condition for switch,
while, etc.). The exception events set of BPEL4WS
is denoted by E
x
.
• Timeout expirations which are denoted by to.
• Sending and receiving messages: the set of types
of messages will be denoted by M. The emis-
sion is denoted by !m and the reception is denoted
CLIENT SYNTHESIS FOR WEB SERVICES BY WAY OF A TIMED SEMANTICS
21

by ?m. We also set !M = {!m |m ∈ M} and
?M = {?m |m ∈ M} and the wildcard ∗ may be
substituted for ! or ?.
• In order to control that the client correctly detects
the end of the service, we introduce
√
, the termi-
nation event. This action will also simplify the de-
finition of the operational semantics.
2.2 The States and the Edges of the
TA
Each state will be associated with a BPEL process
obtained by successive transformations from the ini-
tial process. Two states have different associated
processes. At the beginning of the construction, there
is a single state (the initial one) corresponding to this
process. Each time an edge is defined, a new process
is computed and if this process does not label an ex-
isting state then such a state is created. Due to the
semantic rules given in the next subsection, it can be
proved that the number of derived processes is finite
(and thus the number of states is also finite).
The edges starting from a state are obtained by
a top down analysis of the process expression la-
belling this state. This analysis is usually defined
with the help of operational semantic rules. The defi-
nition of a semantic rule [op
x
] for a generic process
P = op
x
(P
1
,P
2
,...) is given as for Algebra of
Timed Processes (Nicollin and Sifakis, 1994). Com-
ponents of a rule are:
• a boolean expression over some potential
transitions of selected components of P :
Bexp({P
o(i)
α
i
−→ P
o(i)
});
• this condition is enforced by a second condition on
the occurring labels denoted by guard({α
i
}).
• If the two conditions are fulfilled then a state tran-
sition for P is possible where the label Lexp ({α
i
})
is an expression depending on the labels of sub-
processes transition and
• the new process is an expression Nexp(P, {P
o(i)
})
depending on the original process and the new sub-
processes.
So, a generic rule, presented with the usual style has
the following structure:
[op
x
]:
Bexp({P
o(i)
α
i
−→ P
o(i)
})
P
Lexp({α
i
})
−→ Nexp(P, {P
o(i)
})
where guard ({α
i
})
The guard and reset associated with an edge will
be defined in the next subsection. For sake of read-
ability, we do not follow the (verbose) XML syntax
of a BPEL process. Instead we have chosen a simpli-
fied syntax close to the one used for process algebra
whose meaning should be immediate for who knows
BPEL. As usual, we begin the definition of rules by
giving the ones corresponding to the basic processes
of BPEL. These basic processes are
empty, ?o[m],
!o[m] and
throw[e].
The
empty process empty can only terminate (the
notation 0 is the null process).
empty
√
−−− → 0
The ?o[m] and !o[m] processes The process ?o[m]
(which corresponds to the input operation of WSDL)
consists in receiving a message of type m. The
process !o[m] (which corresponds to the notification
operation of WSDL) consists in sending a message of
type m. We consider only these two types of WSDL
operations. The two other types can be built with the
sequence constructor (see below).
∗o[m]
∗m
−−−−→ empty with ∗∈{?, !}
The throw process The process throw[e] raises an
exception e which must be catched in some
scope
process.
∀e ∈ E
x
, throw[e]
e
−−→ 0
The sequence process ( ; ) The process P ; Q
executes the process P then the process Q. Since
the operator “;” is associative, we safely restrict the
number of operands to two processes. The
sequence
process acts as its first subprocess while this process
does not indicate its termination. In the latter case, the
sequence process acts as the second process can do.
∀a =
√
,
P
a
−−→ P
P ; Q
a
−−→ P
; Q
∀a,
P
√
−−− → and Q
a
−−→ Q
P ; Q
a
−−→ Q
where a ∈{!m, ?m,
√
,τ}
Note that if there is an action a =
√
such that P
a
−−→
P
, then P
√
−−− → cannot occur.
The
switch process The process switch[{P
i
}
i∈I
]
chooses to behave as one process among the set {P
i
}.
Each branch of its execution is guarded by an internal
condition. Conditions are evaluated w.r.t. the order of
their appearance in the description. However since the
client has no way to predict the choice of the service,
this order is irrelevant. The main consequence is that
from the point of view of the client, this choice is non
deterministic. The switch process becomes one of
its subprocesses in a silent way. Let us note that we
have implicitly supposed that at least one condition
is fulfilled. In the other case, it is enough to add the
process empty as one of the subprocesses.
∀i ∈ I, switch[{P
i
|i ∈ I}]
τ
−−→ P
i
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
22
The while process The process while[P ] iterates
an inner process as long as an internal condition is
satisfied. Like switch, while evaluates in a silent
way its condition. Thus we have two rules depending
on this internal evaluation.
while[P ]
τ
−−→ P ; while[P ]
while[P ]
τ
−−→ empty
The flow process The process flow[{P
i
}
i∈I
}] si-
multaneously activates a set of processes {P
i
}.For
the moment considering that the synchronization
primitives of BPEL are internal ones we have not yet
implemented this synchronization. Thus this paral-
lel execution is similar to a “fork-join” in the sense
that the combined process ends its interaction when
all subprocesses have completed their execution. Sub-
processes of a flow process act independently except
for one action: they simultaneously indicate their ter-
mination. In the latter case, the flow process be-
comes the null process. Furthermore internal actions
are considered as immediate and consequently the oc-
currence of such an action in a subprocess prevents
the occurrence of a delayed action (sending or recep-
tion of a message) in another subprocess.
• Individual actions:
1.
∀a ∈ E
x
{τ },
∃j ∈ I, P
j
a
−−−→ P
flow[{P
i
|i ∈ I}]
a
−−−→ flow[{P
i
|i ∈ I\{j}} {P
}]
2.
∀m ∈ M,
∃ j∈I, P
j
∗m
−−−−→P
and
∀i = j, ∀ a ∈ E
x
{τ }, not ∃k ∈ I, (P
i
a
−−−→)
flow[{P
i
|i ∈ I}]
∗m
−−−−→ flow[{P
i
|i ∈ I\{j}} {P
}]
• Termination:
∀i ∈ I, P
i
√
−−− → P
i
flow[{P
i
|i ∈ I}]
√
−−− → 0
The scope process scope(P, E) with
E
def
=[{(m
i
,P
i
) |i ∈ I}, (d, Q), {(e
j
,R
j
) |j ∈ J}]
may evolve due to P evolution, reception of a mes-
sage m
i
, expiration of the timeout with duration d
or occurrence of an exception e
j
. We note M
I
=
{m
i
|i ∈ I} and E
J
= {e
j
|j ∈ J}.
• P actions: The termination exits the scope whereas
another action does not.
P
√
−−−→
scope(P, E)
√
−−−→ 0
P
a
−−−→ P
scope(P, E)
a
−−−→ scope(P
,E)
• Receiving a message m
i
:
∀i ∈ I,
∀a ∈ E
x
{τ,
√
}, ¬(P
a
−−→)
scope(P, E)
?m
i
−−−−→ P
i
• Exception handling: which depends whether the
raised exception is catched in this scope.
∀j ∈ J,
P
e
j
−−−→
scope(P, E)
τ
−−→ R
j
∀e/∈ E
J
,
P
e
−−→
scope(P, E)
e
−−→ 0
If an exception e is never catched at any level then
the process is an erroneous one which can straightfor-
wardly checked by examining whether an exception
labels an edge of the TA.
The
pick process can be viewed as a particular
case of the
scope process.
2.3 The Clocks of the TA
We associate a clock with each scope process and
a special clock (x
im
) for handling the immediate ac-
tions. Given a process, we determine by a top down
analysis which clocks are active, i.e. which
scope
subprocesses are activated. The invariant associated
with a state depends whether an immediate action is
possible. If it is the case, the invariant is x
im
=0else
the invariant is a conjunction over the active clocks
of elementary conditions x ≤ d where d is the value
defined in the scope corresponding to x.
The clocks to be reset when following an edge are
simply the clocks which were inactive in the source
process and become active in the target process. x
im
is always reset.
There is no guard for the transitions defined by
the operational rules. However, we add to each state
which owns active clocks, a set of edges labelled by
to (one per subset of active clocks which can simul-
taneously reach their bound). For each such edge the
guard specifies that these active clocks have reached
their bound while the other ones have not.
2.4 The Overall TA Construction
The computation of the timed automaton of the ser-
vice can now be summarized as follows.
• It manages a set of processes to be examined and
a current version of the TA. It starts with the initial
process and a automaton reduced to a single state.
• When examining a process, it first builds the edges
corresponding to the operational rules and for each
target process not already present in the TA, it adds
it to the set of processes to be examined.
CLIENT SYNTHESIS FOR WEB SERVICES BY WAY OF A TIMED SEMANTICS
23

• Then it determines the set of active clocks of the
current process. Based on this information and
the previous edges, it determines the invariant of
the state. Afterwards, it generates the “time-out”
edges.
• The information updating about the clock reset may
take place at two different moments. If an edge
points to an already encountered state then (based
on the active clocks of the two states) this informa-
tion is immediately updated. Otherwise, it will be
updated when the target state will be examined.
3 INTERACTION RELATION
It should be clear that the TA is a compact descrip-
tion of the observable behaviour of the BPEL process.
However, as briefly sketched above, TA have them-
selves a formal semantics defined in terms of a Timed
Transition System (TTS). A TTS over the set of ac-
tions A is a tuple (S, s
0
,A,→) where S is a set
of states, s
0
∈ S is the initial state, A is a finite
set of actions disjoint from time passing, and →⊆
S ×(A∪IR
≥0
) ×S is a set of edges. If (q, e,q
) ∈→,
we also write q
e
−−→ q
. q
d
−−→ q
with d ∈ IR
≥0
corresponds to d units of time passing. The states of
the TTS associated with a TA are simply the reach-
able configurations and its edges are either its discrete
transitions or time passing in a location.
We first informally what should be a correct inter-
action between two TTS. As for the bisimulation re-
lation, we require a relation between pairs of states of
the two systems. Obviously the pair consisting of the
initial states should belong to this relation.
Furthermore, the states of a pair should have a co-
herent view of the next interaction steps to occur. At
first, this implies that the relation must take into ac-
count the mutually observable steps. Thus we intro-
duce the observable transition relation of a TTS by
s
a
⇒ s
iff s
τ
∗
aτ
∗
→ s
, s
⇒ s
iff s
τ
∗
→ s
and s
d
⇒ s
iff s
d
1
τ ...τ d
n
→ s
with
d
i
= d.
Once it is done, we could require (like for bisimu-
lation) that if a state s of the pair (s, s
) may evolve
by an observable transition of its TTS to some new
state s
1
, s
should have a similar observable transi-
tion leading to a state s
1
which would compose with
s
1
, a new pair of consistent views.
However we need to be careful. First, if a TTS
sends a message the other one must be able to receive
the message. So it is necessary to introduce the no-
tion of complementary actions
?m =!m, !m =?m
and ∀a/∈{!m}
m∈M
∪{?m}
m∈M
a = a and to re-
quire that the synchronized evolution is obtained via
complementary actions.
But this requirement is too strong as it does not cap-
ture the different nature of the sending and reception
of a message. A sending is an action whereas a re-
ception is a reaction and will not spontaneously oc-
cur. Therefore a more appropriate relation will first
require that if, in s belonging to the pair (s, s
), a TTS
may receive a message m, then there is a third state
s
of the other TTS indistinguishable from s
w.r.t.
the observable transitions which can send m and sec-
ond that in s
the other TTS can send a message (not
necessarily m). The first condition expresses that the
former TTS is not over specified and the second one
that it will not wait indefinitely for a message.
These considerations yield the following formal de-
finition.
Definition 2 (Interaction relation) Let A
1
=
(S, s
01
,A,→
1
) and A
2
=(S, s
02
,A,→
2
) be two
TTS. Then A
1
and A
2
correctly interact iff ∃∼
⊆ S
1
× S
2
such that:
• s
01
∼ s
02
•∀s
1
,s
2
such that s
1
∼ s
2
– Let a/∈{?m |m ∈ M};if∃s
1
a
==⇒
1
s
1
, then
∃s
2
a
==⇒
2
s
2
with s
1
∼ s
2
and if ∃s
2
a
==⇒
2
s
2
then ∃s
1
a
==⇒
1
s
1
with s
1
∼ s
2
– Let m ∈ M;ifs
1
?m
===⇒
1
s
1
then
∗∃s
−
2
w
===⇒
2
s
2
, ∃s
−
2
w
===⇒
2
s
+
2
, ∃s
+
2
!m
===⇒
2
s
2
with s
1
∼ s
+
2
and s
1
∼ s
2
where w is a
word
∗∃s
2
!m
====⇒
2
s
2
– Let m ∈ M;ifs
2
?m
===⇒
2
s
2
then
∗∃s
−
1
w
===⇒
1
s
1
, ∃s
−
1
w
===⇒
1
s
+
1
, ∃s
+
1
!m
===⇒
1
s
1
with s
+
1
∼ s
2
and s
1
∼ s
2
where w is a
word
∗∃s
1
!m
====⇒
1
s
1
4 CLIENT TIMED AUTOMATON
SYNTHESIS
We are now in position to present the client synthesis
algorithm. First as the client must be implementable,
we require that it is deterministic. Second as it must
handle clocks to manage on its side the timeout of the
service, we need to express its behaviour by a TTS.
These consideration lead to choose as model for our
client a deterministic timed automaton. Last, we must
produce a TA which is in interaction relation with the
TA of the BPEL process.
Before developing we emphasize that there ex-
ist BPEL process which do not admit clients. For
instance, process switch[?o[m], ?o[m
]] internally
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
24
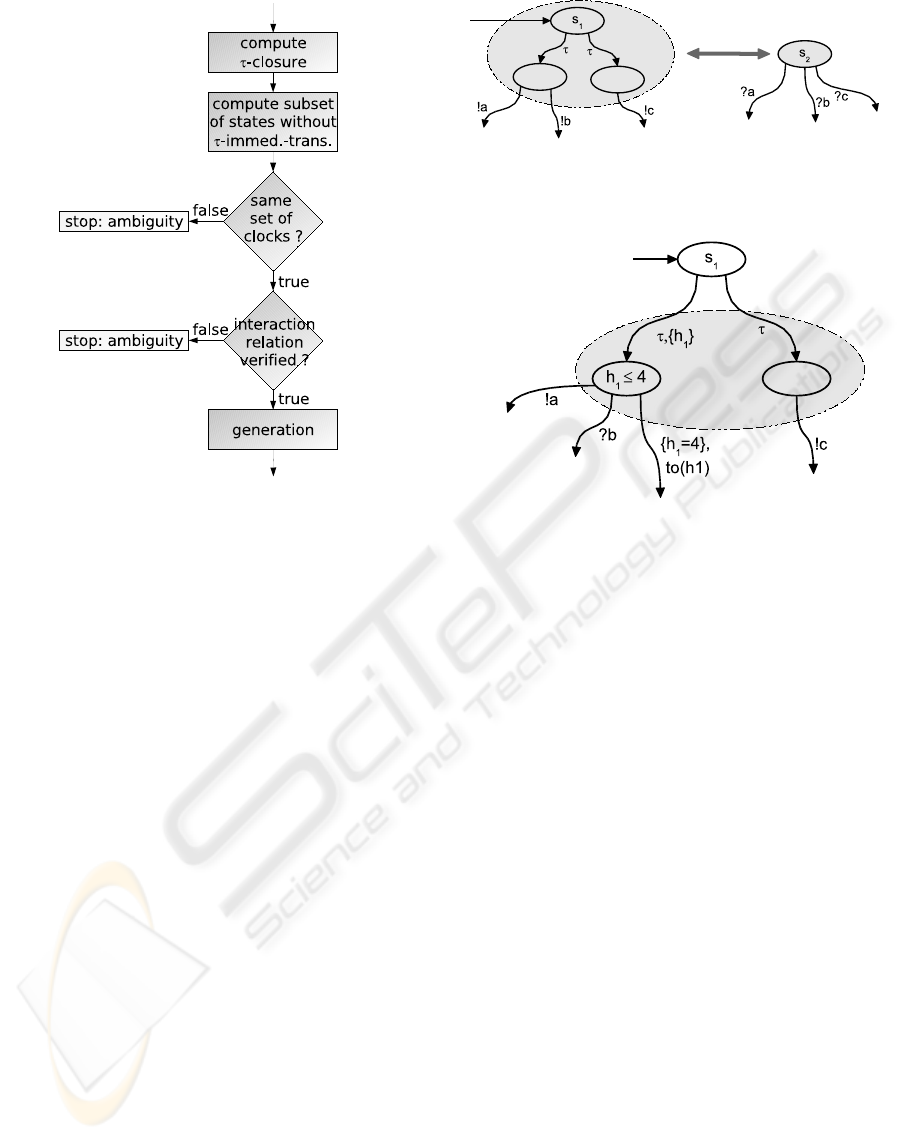
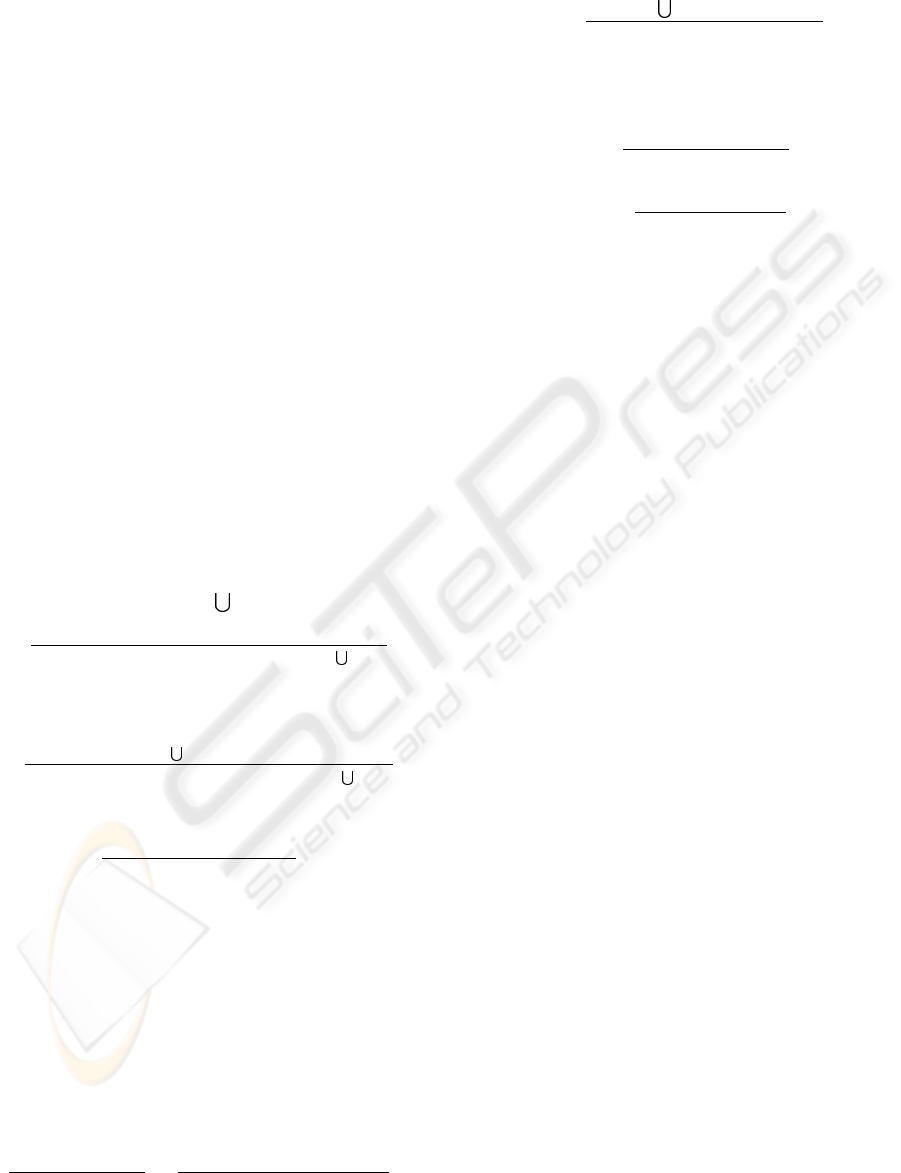
Figure 1: A step of the client synthesis algorithm.
chooses to receive either a message m or m
and thus
no deterministic TA can correctly interact with it since
it would imply that, in its initial state, the client should
send either m or m
while the server would wait the
other message. Note also the difference with process
switch[!o[m], !o[m
]] where a client can be easily de-
signed: just wait for either m or m
. We say that a
process is ambiguous if it does not admit a determin-
istic TA which is in interaction relation with it.
4.1 The Synthesis Algorithm
Our algorithm does not look for any deterministic TA
but restricts its search for a TA which has the same
clocks as the TA of the BPEL process. Thus when
the algorithm outputs “ambiguity”, it just means that
no TA with this constraint exists. In other words, our
procedure is not complete. However this restriction
seems to be reasonable (see the next subsection about
incompleteness of our algorithm).
The general principle of our algorithm (see figure
1) is similar to a determinisation procedure: a state of
the TA client will correspond to a subset of states of
the TA of the service (see fig. 2).
More precisely, each potential state s of the TA
client is associated with a subset of states S
2
(s) of the
TA service which are related to s via the interaction
relation. During the construction, there is a stack of
client states to be processed. At the beginning of the
algorithm, the stack contains an initial client state s
01
such that S(s
01
)={s
02
}, s
02
being the initial state
Figure 2: Service subset of states (left) - client state (right).
Figure 3: A false detection of ambiguity.
of the service. It stops either when the stack is empty
(i.e. the client has been built) or when it has detected
the ambiguity of the service.
First, we compute the -closure by τ -transitions. If
this subset (call it S
) of service states is already asso-
ciated with a state s of the client, then the edge of the
client TA which has generated the subset is redirected
to s. Otherwise, one creates a new client state (say
snew).
We compute a subset of S
(say S
) that con-
tains only states who has not output τ-immediate-
transition.
Next, we compute the set of clocks for each state
of S
. If this clock set is not unique, then there is an
ambiguity (temporal ambiguity case) and we stop the
construction. Afterwards, we check the interaction re-
lation for discrete transitions. If it is not fulfilled then
we also stop the construction.
The construction of the clocks guard has two steps.
The first one consists to copy clock guards of the
edges and clock invariants of the vertice of the TA
server and, next, the complementary transitions are
constructed.
4.2 Incompleteness of the Algorithm
As already discussed, our algorithm is incomplete.
We give now an example of a false detection (see fig-
CLIENT SYNTHESIS FOR WEB SERVICES BY WAY OF A TIMED SEMANTICS
25

ure 3 corresponding to process switch (!o[c], scope
(!o[a], [{(b, empty)}, (4, empty), {}]) ): a process
starting by a
switch such that one branch of this
switch starts with a scope process and another
branch does not activate a timing constraint is de-
tected as an ambiguous service. Indeed in one branch
there is an active clock whereas in the other there is
none.
In a discrete time framework, the previous (com-
plete) method (Haddad et al., 2004b) produces a
client. Indeed the time elapsing is symbolized by an
action (χ) and we implicitly work at a (discrete) TTS
level. Here we work at a higher level (the TA one).
Thus incompleteness is the price to pay in order to
obtain a more compact representation of the client.
5 CONCLUSION
We have shown that the interaction with a Web service
requires a theoretical development relative to its se-
mantics. Extending a previous work in discrete time,
we have proposed in this paper a dense time semantics
for BPEL: from the definition of a service - an abstract
process - we build a timed automaton corresponding
to its formal semantics. Then we have defined an
interaction relation between client and service con-
sidering them as timed transition systems. We have
also designed an algorithm synthetising a determinis-
tic timed automaton (the client) when this is possible
and detecting ambiguous service otherwise.
This approach is implemented in our framework
ICIS and will be soon reachable from the net. For sake
of simplicity, we have considered a perfect communi-
cation channel (no loss and no delay). We are cur-
rently working on the generalization of our approach
by including the specification of the channel charac-
teristics.
REFERENCES
Alur, R. and Dill, D. L. (1994). A theory of timed automata.
Theoretical Computer Science, 126(2):183–235.
Alur, R., Fix, L., and Henzinger, T. A. (1999). Event-clock
automata: a determinizable class of timed automata.
Theoretical Computer Science, 211(1–2):253–273.
Andrews, T., Curbera, F., Dholakia, H., Goland, Y., Klein,
J., Leymann, F., Liu, K., Roller, D., Smith, D., Thatte,
S., Trickovic, I., and Weerawarana, S. (2003). Busi-
ness process execution language for web services.
Bergstra, J. and Klop, J. (1984). Process algebra for syn-
chronous communication. Information and Control,
60(1-3):109–137.
Foster, H., Uchitel, S., J.Magee, , and J.Kramer (2003).
Model-based verification of web service composi-
tions. In Proc. of. the 18th Int. Conf. on Automated
Software Eng.
Fu, X., Bultan, T., and Su, J. (2004a). Analysis of interact-
ing bpel web services. In Proc. of the 13th Interna-
tional World Wide Web Conference (WWW’04), USA.
ACM Press.
Fu, X., Bultan, T., and Su, J. (2004b). Wsat: A tool for
formal analysis of web services. In Proc. of the 16th
International Conference on Computer Aided Verifi-
cation (CAV’04).
Haddad, S., Melliti, T., Moreaux, P., and Rampacek, S.
(2004a). A dense time semantics for Web services
specifications languages. In Proc. of the 1st Int. Conf.
on Information & Communication Technologies: from
Theory to Applications (ICTTA’04), pages 647–648,
Damascus, Syria. IEEE France.
Haddad, S., Melliti, T., Moreaux, P., and Rampacek, S.
(2004b). Modelling web services interoperability. In
Proc. of the 6th Int. Conf. on Enterprise Information
Systems (ICEIS04), Porto, Portugal.
Hoare, C. (1985). Communicating Sequential Processes.
Prentice Hall, Englewood Cliffs, NJ, USA.
Juric, M. (2005). BPEL and Java. On line journal theserver-
side.com. http://www.theserverside.com/
articles/article.tss?l=BPELJava.
Juric, M., Sarang, P., and Mathew, B. (2005). Business
Process Execution Language for Web Services. Packt
Publishing.
Melliti, T. and Haddad, S. (2003). Synthesis of agents for
web services interaction. In Workshop Semantic Web
Services for Enterprise Application Integration and E-
Commerce of the Fifth International Conference on
Electronic Commerce, Pittsburgh, USA.
Milner, R. (1989). Communication and Concurrency.
Prentice-Hall, Englewood Cliffs, NJ, USA.
Nicollin, X. and Sifakis, J. (1994). The algebra of timed
processes, atp: theory and application. Inf. Comput.,
114(1):131–178.
Staab, S., van der Aalst, W., Benjamins, V., Sheth, A.,
Miller, J., Bussler, C., Maedche, A., Fensel, D., and
Gannon, D. (2003). Web services: Been there, done
that? IEEE Intelligent Systems, 18:72–85.
Thatte, S. (2001). Xlang: Web services for busi-
ness process design. World Wide Web page.
http://www.gotdotnet.com/team/xml/wsspecs/xlang-
c/default.htm.
Tidwell, D. (2000). Web services - the web’s next revolu-
tion. IBM developerWorks.
Turner, K. J. (2005). Formalising web services. In Proc.
of Formal Techniques for Networked and Distributed
Systems (FORTE 2005), volume LNCS 3731, pages
473–488, Taipei, Taiwan. Springer.
WSDL (2001). Web services description language (wsdl)
1.1. Technical report, World Wide Web Consortium.
http://www.w3.org/TR/wsdl.
ICEIS 2006 - SOFTWARE AGENTS AND INTERNET COMPUTING
26
